现代控制理论 状态空间表达式的建立:方框图法
- 格式:pdf
- 大小:264.34 KB
- 文档页数:13
现代控制理论_长安大学中国大学mooc课后章节答案期末考试题库2023年1.线性系统的状态空间表达式如下,则系统能控能观子空间为()维系统。
【图片】答案:22.已知线性定常系统的状态方程如下,状态反馈阵【图片】()使闭环系统极点配置为【图片】。
【图片】答案:3.下列语句中,正确的是()。
答案:系统状态空间实现中选取状态变量不是唯一的,其状态变量的个数是唯一的。
4.线性系统的状态空间表达式为如下,则系统的模拟结构图为()。
【图片】答案:5.系统方框图,如下图所示,则根据系统方框图建立的状态空间表达式为()。
【图片】答案:6.已知机械系统如下图所示。
其中质量块m受到外力u(t)的作用产生位移y(t),质量块m与地面之间无摩擦。
以外力 u(t)为输入信号,位移y(t)为输出量,系统状态空间模型为()。
【图片】答案:7.若A、B是方阵,则必有【图片】。
答案:错误8.已知单输入单输出系统的传递函数为【图片】,则系统状态空间表达式为()。
答案:9.已知系统的传递函数为【图片】,则系统状态空间表达式为()。
答案:10.原系统传递函数阵的阶数一定高于能控能观子系统传递函数的阶数。
答案:错误11.带状态观测器的状态反馈系统和直接状态反馈系统具有相同的传递函数矩阵。
答案:正确12.带状态观测器的状态反馈系统,观测器的极点会全部被闭环系统的零点相消。
答案:正确13.单输入-单输出线性时不变系统状态空间表达式的矢量矩阵形式为()。
答案:14.系统方框图如下所示,则系统的状态空间表达式为()。
【图片】答案:;15.RLC电路网络如下图所示,其中【图片】为输入电压, 【图片】为输出电压。
选择状态变量【图片】,则系统状态空间表达式为()。
【图片】答案:16.已知单输入单输出系统的微分方程为【图片】,则系统状态空间模型为()。
答案:17.已知系统的传递函数为【图片】,则系统状态空间表达式的对角型实现为()。
答案:18.已知非线性系统的微分方程为【图片】,则利用近似线性化方法得到系统的局部线性化状态方程是()。
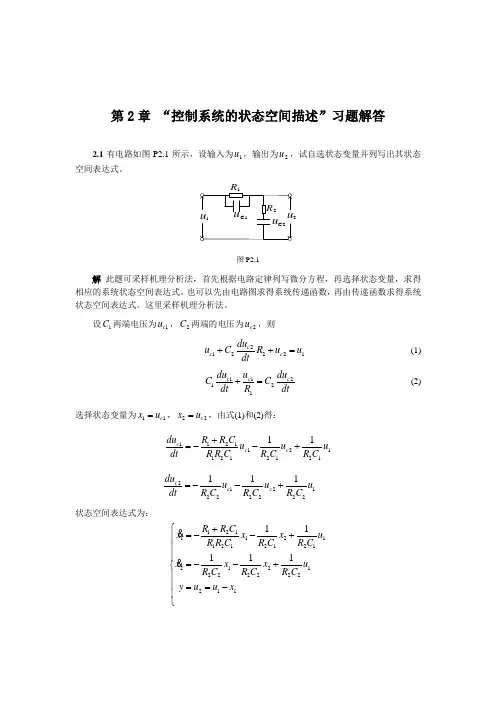
第2章 “控制系统的状态空间描述”习题解答2.1有电路如图P2.1所示,设输入为1u ,输出为2u ,试自选状态变量并列写出其状态空间表达式。
图P2.1解 此题可采样机理分析法,首先根据电路定律列写微分方程,再选择状态变量,求得相应的系统状态空间表达式。
也可以先由电路图求得系统传递函数,再由传递函数求得系统状态空间表达式。
这里采样机理分析法。
设1C 两端电压为1c u ,2C 两端的电压为2c u ,则212221c c c du u C R u u dt++= (1) 112121c c c du u duC C dt R dt+= (2) 选择状态变量为11c x u =,22c x u =,由式(1)和(2)得:1121121121212111c c c du R R C u u u dt R R C R C R C +=--+ 2121222222111c c c du u u u dt R C R C R C =--+ 状态空间表达式为:12111211212121212122222221111111R R C x x x u R R C R C R C x x x u R C R C R C y u u x +⎧=--+⎪⎪⎪=--+⎨⎪⎪==-⎪⎩即: 12121121211112222222211111R R C R C R R C R C x x u x x R C R C R C +⎡⎤⎡⎤-⎢⎥⎢⎥⎡⎤⎡⎤⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦--⎢⎥⎢⎥⎣⎦⎣⎦[]11210x y u x ⎡⎤=-+⎢⎥⎣⎦2.2 建立图P22所示系统的状态空间表达式。
1图P2.2解 这是一个物理系统,采用机理分析法求状态空间表达式会更为方便。
令()f t 为输入量,即u f =,1M ,2M 的位移量1y ,2y 为输出量, 选择状态变量1x =1y ,2x = 2y ,3x =1dy dt,24dyx dt =。

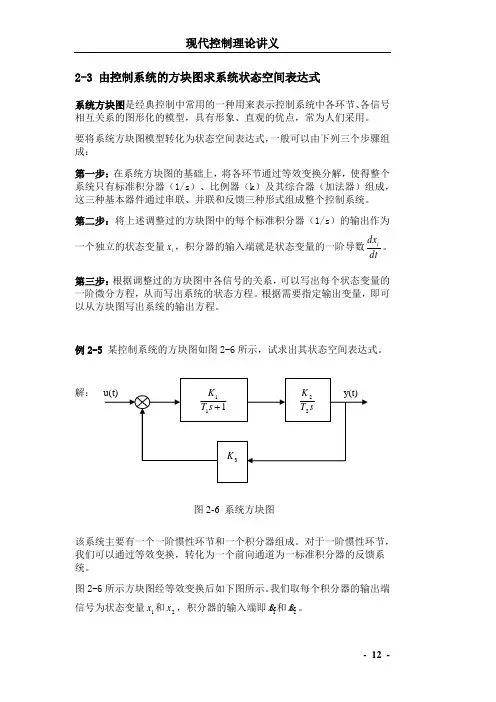
2-3 由控制系统的方块图求系统状态空间表达式系统方块图是经典控制中常用的一种用来表示控制系统中各环节、各信号相互关系的图形化的模型,具有形象、直观的优点,常为人们采用。
要将系统方块图模型转化为状态空间表达式,一般可以由下列三个步骤组成:第一步:在系统方块图的基础上,将各环节通过等效变换分解,使得整个系统只有标准积分器(1/s )、比例器(k )及其综合器(加法器)组成,这三种基本器件通过串联、并联和反馈三种形式组成整个控制系统。
第二步:将上述调整过的方块图中的每个标准积分器(1/s )的输出作为一个独立的状态变量i x ,积分器的输入端就是状态变量的一阶导数dtdx i。
第三步:根据调整过的方块图中各信号的关系,可以写出每个状态变量的一阶微分方程,从而写出系统的状态方程。
根据需要指定输出变量,即可以从方块图写出系统的输出方程。
例2-5 某控制系统的方块图如图2-6所示,试求出其状态空间表达式。
解:该系统主要有一个一阶惯性环节和一个积分器组成。
对于一阶惯性环节,我们可以通过等效变换,转化为一个前向通道为一标准积分器的反馈系统。
图2-6所示方块图经等效变换后如下图所示。
我们取每个积分器的输出端信号为状态变量1x 和2x ,积分器的输入端即1x和2x 。
图2-6 系统方块图从图可得系统状态方程: ()⎪⎪⎩⎪⎪⎨⎧+--=-+-==uT K x T x T K K x K u T K x T x x T K x 112111311311212222111 取y 为系统输出,输出方程为:1x y =写成矢量形式,我们得到系统的状态空间表达式:[]⎪⎪⎪⎪⎩⎪⎪⎪⎪⎨⎧=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎦⎤⎢⎢⎣⎡=x y u T K x K K T K x 010********例2-6 求如图2-7(a )所示系统的动态方程。
解:图2-7(a)中第一个环节21++s s 可以分解为⎪⎭⎫ ⎝⎛+-211s ,即分解为两个通道。
现代控制理论Model Control Theory前言1.胚胎萌芽期(1945年以前)•十八世纪以后,蒸汽机的使用提出了调速稳定等问题1765年俄国人波尔祖诺夫发明了锅炉水位调节器1784年英国人瓦特发明了调速器,蒸汽机离心式调速器1877年产生了劳斯稳定判据•十九世纪前半叶,动力使用了发电机、电动机促进了水利、水电站的遥控和程控的发展以及电压、电流的自动调节技术的发展•十九世纪末,二十世纪初,使用内燃机促进了飞机、汽车、船舶、机器制造业和石油工业的发展,产生了伺服控制和过程控制•二十世纪初第二次世界大战,军事工业发展很快飞机、雷达、火炮上的伺服机构,总结了自动调节技术及反馈放大器技术,搭起了经典控制理论的架子,但还没有形成学科。
2.经典控制理论时期(1940-1960)1945年美国贝尔实验室的Bode和Nyqusit提出频率响应法,奠定了控制理论的基础。
美国MIT的N. Wiener在研究随机过程的预测问题中,提出Wiener滤波理论.50年代趋于成熟.主要内容对单输入单输出系统进行分析,采用时域、频率法(频域)、根轨迹法(复数域)、相平面法、描述函数法;讨论系统稳定性的代数和几何判据以及校正网络等。
面临的挑战:被控对象日益复杂化、控制性能要求不断提高。
wiener3.现代控制理论时期(50年代末-60年代初)空间技术的发展提出了许多复杂控制问题,用于导弹、人造卫星和宇宙飞船上。
取得的成就1:1957年发射人造地球卫星;2:工业机器人产品;3:1961年载人航天;4:1969年登月;4.大系统和智能控制时期(70年代)各学科相互渗透,要分析的系统越来越大,越来越复杂。
例如:人工智能、模拟人的人脑功能、机器人等。
应用举例本课程内容•状态空间模型;•基于状态空间模型的系统分析(Analysis):运动分析、能控性、能观性、稳定性•基于状态空间模型的系统综合(Synthesis):极点配置、控制器设计、观测器设计、最优控制器设计。