现代控制理论--1.状态空间模型
- 格式:pdf
- 大小:313.31 KB
- 文档页数:8
状态空间模型状态空间模型是一种用于描述动态系统行为的数学模型。
在状态空间模型中,系统的行为由状态方程和观测方程确定。
状态方程描述系统状态如何随时间演变,而观测方程则描述系统状态如何被观测。
通过利用状态空间模型,我们可以对系统进行建模、预测和控制。
状态空间模型的基本概念状态空间模型通常由以下几个要素构成:1.状态变量(State Variables):描述系统状态的变量,通常用向量表示。
状态变量是系统内部的表示,不可直接观测。
2.观测变量(Observation Variables):直接观测到的系统状态的变量,通常用向量表示。
3.状态方程(State Equation):描述状态变量如何随时间演变的数学方程。
通常表示为状态向量的一阶微分方程。
4.观测方程(Observation Equation):描述观测变量与状态变量之间的关系的数学方程。
状态空间模型的应用状态空间模型在许多领域都有着广泛的应用,包括控制系统、信号处理、经济学和生态学等。
其中,最常见的应用之一是在控制系统中使用状态空间模型进行系统建模和控制设计。
在控制系统中,状态空间模型可以用于描述系统的动态行为,并设计控制器来实现系统性能的优化。
通过对状态方程和观测方程进行数学分析,可以确定系统的稳定性、可控性和可观测性,并设计出满足特定要求的控制器。
状态空间模型的特点状态空间模型具有以下几个特点:1.灵活性:可以灵活地描述各种复杂系统的动态行为,适用于各种不同的应用领域。
2.结构化:将系统分解为状态方程和观测方程的结构使得系统的分析更加清晰和系统化。
3.预测性:通过状态空间模型,可以进行系统状态的预测和仿真,帮助决策者做出正确的决策。
4.优化性:可以通过状态空间模型设计出有效的控制器,优化系统的性能指标。
在实际应用中,状态空间模型可以通过参数估计和参数辨识等方法进行模型的训练和调整,以适应实际系统的特性。
结语状态空间模型是一种强大的数学工具,可以帮助我们理解和分析动态系统的行为。
Chapter1控制系统的状态空间模型1.1 状态空间模型在经典控制理论中,采用n 阶微分方程作为对控制系统输入量)(t u 和输出量)(t y 之间的时域描述,或者在零初始条件下,对n 阶微分方程进行Laplace 变换,得到传递函数作为对控制系统的频域描述,“传递函数”建立了系统输入量)]([)(t u L s U =和输出量)]([)(t y L s Y =之间的关系。
传递函数只能描述系统的外部特性,不能完全反映系统内部的动态特征,并且由于只考虑零初始条件,难以反映系统非零初始条件对系统的影响。
现代控制理论是建立在“状态空间”基础上的控制系统分析和设计理论,它用“状态变量”来刻画系统的内部特征,用“一阶微分方程组”来描述系统的动态特性。
系统的状态空间模型描述了系统输入、输出与内部状态之间的关系,揭示了系统内部状态的运动规律,反映了控制系统动态特性的全部信息。
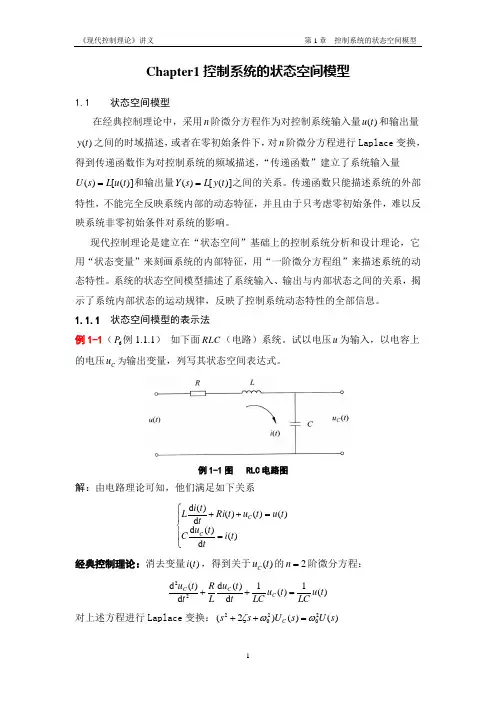
1.1.1 状态空间模型的表示法例1-1(6P 例1.1.1) 如下面RLC (电路)系统。
试以电压u 为输入,以电容上的电压C u 为输出变量,列写其状态空间表达式。
例1-1图 RLC 电路图解:由电路理论可知,他们满足如下关系⎪⎩⎪⎨⎧==++)(d )(d )()()(d )(d t i t t u C t u t u t Ri t t i L C C 经典控制理论:消去变量)(t i ,得到关于)(t u C 的2=n 阶微分方程:)(1)(1d )(d d )(d 22t u LCt u LC t t u L R t t u C C C =++ 对上述方程进行Laplace 变换:)()()2(20202s U s U s s C ωωζ=++得到传递函数:202202)(ωζω++=s s s G ,LC10=ω,L R 2=ζ 现代控制理论:选择⎪⎪⎭⎫⎝⎛=⎪⎪⎭⎫ ⎝⎛)()(21t u t i x x C 流过电容的电流)(t i 和电容上的电压)(t u C 作为2个状态变量,2=n (2个储能元件);1个输入为)(t u ,1=m ;1个输出C u y =,1=r 。
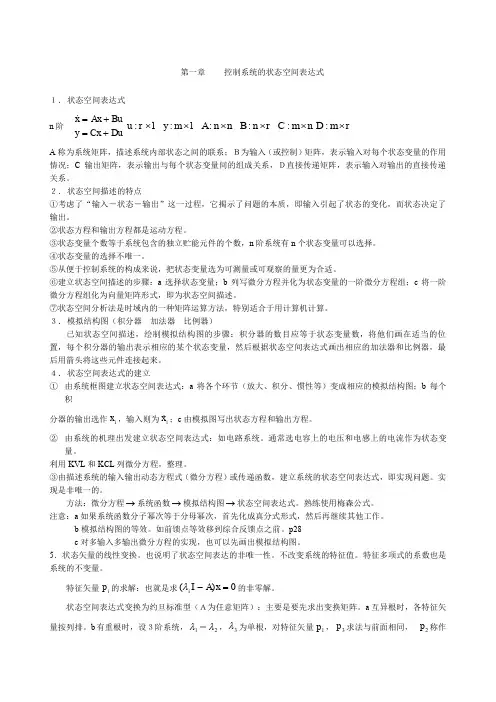
第一章控制系统的状态空间表达式1. 状态空间表达式n 阶 DuCx y Bu Ax x +=+= 1:⨯r u 1:⨯m y n n A ⨯: r n B ⨯: n m C ⨯:r m D ⨯:A 称为系统矩阵,描述系统内部状态之间的联系;B为输入(或控制)矩阵,表示输入对每个状态变量的作用情况;C 输出矩阵,表示输出与每个状态变量间的组成关系,D直接传递矩阵,表示输入对输出的直接传递关系。
2. 状态空间描述的特点①考虑了“输入-状态-输出”这一过程,它揭示了问题的本质,即输入引起了状态的变化,而状态决定了输出。
②状态方程和输出方程都是运动方程。
③状态变量个数等于系统包含的独立贮能元件的个数,n 阶系统有n 个状态变量可以选择。
④状态变量的选择不唯一。
⑤从便于控制系统的构成来说,把状态变量选为可测量或可观察的量更为合适。
⑥建立状态空间描述的步骤:a 选择状态变量;b 列写微分方程并化为状态变量的一阶微分方程组;c 将一阶微分方程组化为向量矩阵形式,即为状态空间描述。
⑦状态空间分析法是时域内的一种矩阵运算方法,特别适合于用计算机计算。
3. 模拟结构图(积分器 加法器 比例器)已知状态空间描述,绘制模拟结构图的步骤:积分器的数目应等于状态变量数,将他们画在适当的位置,每个积分器的输出表示相应的某个状态变量,然后根据状态空间表达式画出相应的加法器和比例器,最后用箭头将这些元件连接起来。
4. 状态空间表达式的建立① 由系统框图建立状态空间表达式:a 将各个环节(放大、积分、惯性等)变成相应的模拟结构图;b 每个积分器的输出选作i x ,输入则为i x;c 由模拟图写出状态方程和输出方程。
② 由系统的机理出发建立状态空间表达式:如电路系统。
通常选电容上的电压和电感上的电流作为状态变量。
利用KVL 和KCL 列微分方程,整理。
③由描述系统的输入输出动态方程式(微分方程)或传递函数,建立系统的状态空间表达式,即实现问题。
《现代控制理论》课后习题及答案第一章控制系统的状态空间表达式1-1.试求图1-1系统的模拟结构图,并建立其状态空间表达式。
图1-27系统方块结构图图1-1 系统结构方块图解:系统的模拟结构图如下:图1-30双输入--双输出系统模拟结构图图1-2 双输入—双输出系统模拟结构图系统的状态方程如下:u K K x K K x K K x X K x K x x x x J K x J x J K x J K x x J K x x x pp p p n p b1611166131534615141313322211+--=+-==++--===••••••令y s =)(θ,则1x y =所以,系统的状态空间表达式及输出方程表达式为[]⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡-----=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡••••••6543211654321111111126543210000010000000000000010010000000000010x x x x x x y uK K x x x x x x K K K K K K J K J J K J K J K x x x x x x p p pp n p b1-2.有电路如图1-3所示。
以电压)(t u 为输入量,求以电感中的电流和电容上的电压作为状态变量的状态方程,和以电阻2R 上的电压作为输出量的输出方程。
U图1-28 电路图图1-3 电路图解:由图,令32211,,x u x i x i c===,输出量22x R y =有电路原理可知:•••+==+=++3213222231111x C x x x x R x L ux x L x R 既得22213322222131111111111x R y x C x C x x L x L R x u L x L x L R x =+-=+-=+--=•••写成矢量矩阵形式为:[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎣⎡----=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡32121321222111321000*********x x x R y u L x x x CCL L R L L R x x x 。