第二章 应力分析
- 格式:doc
- 大小:885.00 KB
- 文档页数:20

《过程设备设计基础》教案2—压力容器应力分析课程名称:过程设备设计基础专业:过程装备与控制工程任课教师:第2章 压力容器应力分析§2-1 回转薄壳应力分析一、回转薄壳的概念薄壳:(t/R )≤0.1 R----中间面曲率半径 薄壁圆筒:(D 0/D i )max ≤1.1~1.2 二、薄壁圆筒的应力图2-1、图2-2 材料力学的“截面法”三、回转薄壳的无力矩理论1、回转薄壳的几何要素(1)回转曲面、回转壳体、中间面、壳体厚度 * 对于薄壳,可用中间面表示壳体的几何特性。
tpD td pR tpD Dt D p i 22sin 24422====⨯⎰θπθϕϕσσαασπσπ(2)母线、经线、法线、纬线、平行圆(3)第一曲率半径R1、第二曲率半径R2、平行圆半径r(4)周向坐标和经向坐标2、无力矩理论和有力矩理论(1)轴对称问题轴对称几何形状----回转壳体载荷----气压或液压应力和变形----对称于回转轴(2)无力矩理论和有力矩理论a、外力(载荷)----主要指沿壳体表面连续分布的、垂直于壳体表面的压力,如气压、液压等。
P Z= P Z(φ)b、内力薄膜内力----Nφ、Nθ(沿壳体厚度均匀分布)弯曲内力---- Qφ、Mφ、Mθ(沿壳体厚度非均匀分布)c、无力矩理论和有力矩理论有力矩理论(弯曲理论)----考虑上述全部内力无力矩理论(薄膜理论)----略去弯曲内力,只考虑薄膜内力●在壳体很薄,形状和载荷连续的情况下,弯曲应力和薄膜应力相比很小,可以忽略,即可采用无力矩理论。
●无力矩理论是一种近似理论,采用无力矩理论可是壳地应力分析大为简化,薄壁容器的应力分析和计算均以无力矩理论为基础。
在无力矩状态下,应力沿厚度均匀分布,壳体材料强度可以得到合理的利用,是最理想的应力状态。
(3)无力矩理论的基本方程a、无力矩理论的基本假设小位移假设----壳体受载后,壳体中各点的位移远小于壁厚。
考虑变形后的平衡状态时壳用变形前的尺寸代替变形后的尺寸直法线假设----变形前垂直于中面的直线变形后仍为直线,且垂直于变形后的中面。
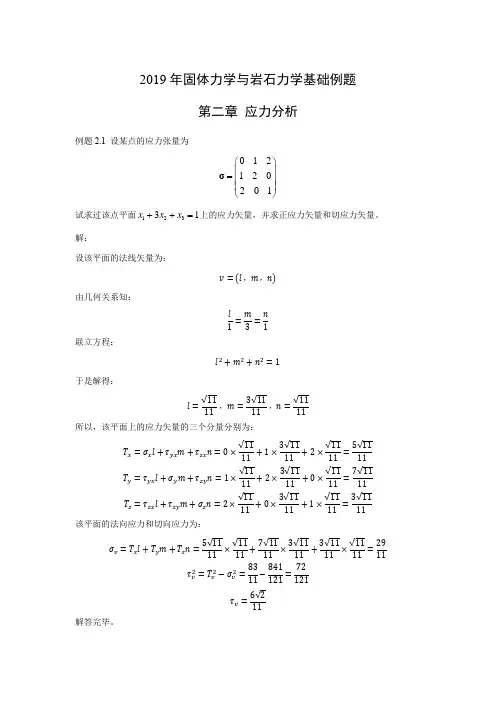
2019年固体力学与岩石力学基础例题第二章 应力分析例题2.1 设某点的应力张量为012120201⎛⎫ ⎪= ⎪ ⎪⎝⎭σ试求过该点平面12331x x x ++=上的应力矢量,并求正应力矢量和切应力矢量。
解:设该平面的法线矢量为:v =(l ,m ,n)由几何关系知:l 1=m 3=n 1联立方程:l 2+m 2+n 2=1于是解得:l =√1111,m =3√1111,n =√1111所以,该平面上的应力矢量的三个分量分别为:T x =σx l +τyx m +τzx n =0×√1111+1×3√1111+2×√1111=5√1111 T y =τyx l +σy m +τzy n =1×√1111+2×3√1111+0×√1111=7√1111 T z =τzx l +τzy m +σz n =2×√1111+0×3√1111+1×√1111=3√1111该平面的法向应力和切向应力为:σv =T x l +T y m +T z n =5√1111×√1111+7√1111×3√1111+3√1111×√1111=2911τv 2=T v 2−σv 2=8311−841121=72121τv =6√211解答完毕。
例题2.2 设有图2.1示三角形水坝,试列出OP 面(光滑面)的应力边界条件。
图2.1解:在OP 面上有应力边界条件:(σx1x2)x1=0=γx 2 (τx1x2)x1=0=0式中,γ为水的比重。
解答完毕。
例题2.3 已知一点的应力张量为2201211210σ⎛⎫ ⎪ ⎪ ⎪⎝⎭过该点的一个作用面,作用面上的应力矢量=N 0,求: 1)22σ;2)作用面法线与坐标系的夹角余弦(,,)l m n 。
解:由于具有一个平面,使得在过改点的一个平面上,应力矢量为0,即:0×l +1×m +2×n =0 1×l +σ22×m +1×n =0 2×l +1×m +0×n =0又根据几何关系:l 2+m 2+n 2=1解得:σ22=12l =√66 m =−√63n =√66解答完毕。
第二章 应力分析研究弹性力学问题要从三方面规律(条件):平衡、几何、物理来建立,本章就是研究第一个规律:平衡规律。
第1节 内力和外力1.1 外力:物体承受外因而导致变形,外因可以是热力作用、化学力作用、电磁力作用和机械力作用;另一方面从量纲分类,外力主要为体积力和表面积力。
我们讨论的外力是属于机械力中的体力和面力的范围。
1. 外部体力:作用在物体单位体积(质量)上的力如重力(惯性力)。
量纲:力/(长度)3。
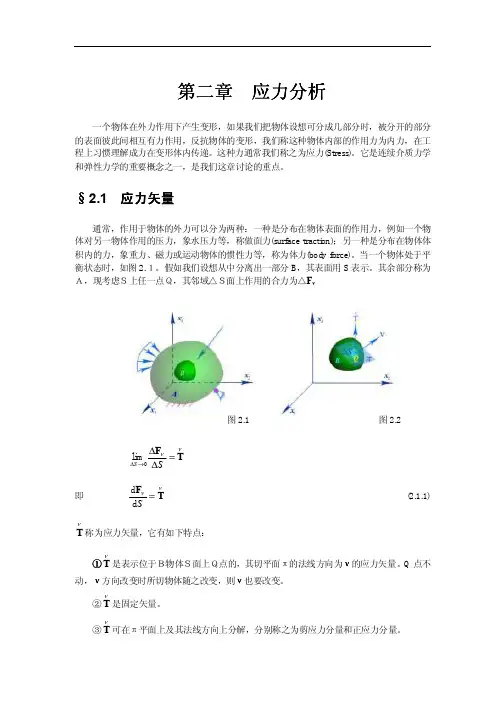
求V 中任意点P 上承受体力采用极限方法:X X 2X X 2第2节 应力和应力张量2.1 应力当变形体受外力作用时,要发生变形,同时引起物体内部各点之间相互作用力(抵抗力)——内力,为了描述物体内任意点P 的内力可采取如下方法:过P 点设一个截面S 将V 分为两部分:(作用力与反作用力)FF -l n n x ==1、m n n y ==2、n n n z ==3。
即n t m t l t n t n t n t n t t z y x i i n )()()(3)3(2)2(1)1()()( ++=++==,,1S n P B C S A B C ∆∆∆∆==0)()(=++-V f S t S t i i n ∆∆∆而 S n S t t i i i i ∆∆=-=-,)()(代入上式,并忽略高阶微量 0)()(=-S n t S t i i n ∆∆或 )()(i i n t n t =展开为 3)3(2)2(1)1()(n t n t n t t n++= 或n t m t l t t z y x n )()()()( ++=2.1 应力张量每个坐标面上的应力矢量又可以沿三个坐标面分解三个分量,比如坐标面法线为x 1jxj j j z xz y xy x xx x e e e e e e e e t t σσσσσσσσ==++=++==1313212111)()1(x 2x 1 x 1(x)x 3,,32S n PAB S n PAC ∆=∆∆=∆同理,得j yj j j z yz y yy x yx y e e e e e e e e t t σσσσσσσσ==++=++==2323222121)()2(jzj j j z zz y zy x zx z e e e e e e e e t t σσσσσσσσ==++=++==3333232131)()3(将法线方向n 取为单位长度,则将式(3.25)代入式(3.26),得3.3.2.讨论:) ( 333333222222253.l p l p l p l p ⎪⎪⎪⎭⎪⎬====σσσσ) (2631232221.l l l =++7)=1 ()()+() (23322222311.p p p σσσ+(1):如果以p 1,p 2,p 3为坐标轴建立直角坐标系,则在此坐标系中,上式为一椭球面方程,主半轴分别为σ1,σ2,σ3,称为应力椭球面。
第二章:应力分析§2-1 几个基本概念一 力的几个基本概念:弹性力学是塑性力学的基础,在讲塑性力学之前必须讲一部分弹性力学,它们所研究的内容都是力和变形。
所以必须从力的概念入手。
1 外力:物体与物体之间的相互作用称之为力。
在这里我们称之为外力。
外力可分为二类:1) 面力:作用在物体表面的力称之为面力。
面力可分为集中力和分布力。
2) 体力:作用在物体内各质点上的力为体力。
如重力、磁力、惯性力。
2内力:在外力的作用 下,物体内各质点间就会产生相互作用,这种质点间的相互为内力。
内力可以用平衡法求得。
3 应力:单位面积上的内力。
更确切地说,作用在质点上的内力。
应力可分为三类:1) 全应力:用L 面截受力体,得面积为A ,在A 面上取一点Q ,围绕Q 取一很小面积为ΔF ,设ΔF 上的内力合力为ΔP, 则有F P S lin F ∆∆=→∆0=dF dP为A 面上Q 点的全应力。
S 是一个极限的概念,表示每一点的应力是不同的。
单位面积上的内力是一个平均的概念。
每一点是相同的。
这之间有一定区别。
2) 正应力:将全应力分别向法向和切向分解垂直于A 平面方向的分量为正应力。
3) 剪应力:将全应力分别向法向和切向分解平行于A 平面方向的分量为剪应力。
二 应力的求法:一根圆棒受单向拉伸力P 的作用,棒的截面积为F ,在棒内任意取一点Q,过Q 可以做无数个平面,我们任意取一平面M ,其面积为A ,其法线与轴线的夹角为θ,根据圣维南原理,两端受力很复杂,而离端点较远的地方其应力比较简单,各点的应力状态为单向应力状态。
各点的应力是一样的,都等于平均应力。
θθcos cos F PF P AP dF dp S ====将S 向法线方向投影:θθσ2cos cos FPS == 将S 向平面方向投影:θθθτcos sin sin FPS == 令0σ=FP则有:θσσ20cos = θθστcos sin 0=三 应力和平面方向的关系:我们已经看到,F 面上的应力和M 面上的应力不同,即:同一点上的不同平面上的应力是不同的,现在专门讨论这一问题。
1 在不同的平面上,θ不同,同上的应力不同过A 点可以做无数个平面,由于它的θ不同,面上的应力不同,M 是过Q 点的任意平面,它的法线与轴线的夹角为θ,同是过Q 点的平面,由于它的θ角不同,面上的应力不同,也就是说,过Q 点的面上的应力随θ变化,是θ的函数。
2 已知0σ=FP应用上面的公式可以求得任意θ面上的应力 3 单向应力状态下Q 点的应力状态可以用任意面上的应力表示或者用0σ=FP表示。
用0σ=F P 表示有两层意思,1) 0σ=F P 已知或可以求得。
2)由0σ=FP 可以求得任意面上的应力。
§2-2直角坐标系中一点的应力状态一 直角坐标系中一点的应力状态的表示方法 1切取单元体如图所示,是一个受力复杂的物体,将其放在一个直角坐标系中, 该物体中,任取一点Q,作三对分别垂直于X 、Y 、Z 轴的平面,每对平面间的距离无限小,如此可以切出一个无限小的六面体,称之为单元体,单元体有六个微分面。
2 微分面的命名在单元体上,垂直于x 轴的微分面为x 面,垂直于y 轴的称y 面,垂直于z 轴的称z 面,三个微分面分别垂直于三条轴,三条轴就是三个面的法线方向。
每对微分面相互平行,而另三个微分面相互垂直。
3 应力分量的表示 在空间中,一个物体受到一个复杂力系的作用时,物体内部每个质点都是一个受力的单元体,单元体无限小,小到单元体的每一个面都经过这个点,单元体可以代表这一个点,单元体每个微分面上都有力的作用,可以将微分面上的力合成一个合力,在x 面上的合力为S x ,在y 面上的合力为S y ,在z 面上的合力为S z ,这三个合力都称为全应力。
1) 应力分量的表示:分别将S x 、S y 、S z 三条轴投影, S x 向x 、y 、z 轴投影可得:σxx σxy σxzS y 向x 、y 、z 轴投影可得:σyx σyy σyz S z 向x 、y 、z 轴投影可得:σzx σzy σzz若引入张量符号ij σ表示,其中i,j=x,y,z i 取x ,j 分别取x 、y 、z 可得:σxx σxy σxzi 取y ,j 分别取x 、y 、z 可得:σyxσyyσyz =ij σi 取z, j 分别取x 、y 、z 可得:σzx σzy σzz2) 角标记法前面的角标表示作用面,后面的角标表示力的作用方向。
例如:σxx 表示作用在x 面上的作用方向为x 的作用力。
因为垂直于x 面的为正应力,一般用σx 表示。
σxy 表示作用在x 面上y 方向的应力,切于x 面,为剪应力,一般用τxy 表示。
同理σxz 表示作用在x 面上z 方向的应力,切于x 面,为剪应力,一般用τxz 表示。
以此类推可得:⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=z zy zx yz y yx xz xy x ij στττστττσσ4应力分量的正负号:1) 微分面的正负号:在单元体上,外法线指向坐标轴的正向的微分面为正面,反之为负面,如前面、上面、右面为正面,其它为负面。
2) 应力分量的正负:在正面上,指向坐标轴正向的应力分量为正,反之为负。
在 负面上,指向坐标轴负向的应力分量为正,反之为负。
所以有正正为正,负负为正,正负为负,负正为负。
也可以说同号为下,异号为负。
5每对正负微分面上应力之间的关系(如x 面正负面之间的关系)单元体很小,小到六个微分面都经过同一质点,实际上每对微分面就成了一个微分面的正负两个面,作用 在正面上的正应力和作用 在负面上的正应力就成了大小相等方向相反的都 经过同一质点的绝对值相等的力。
根据应力正负号规定,同号为下,异号为负,这一对应力的符号也相同。
对于剪 应力τxz 作用 x 的正面上,方向是y 的正方向,为正剪应力,在负面上,方向为负,也为正剪应力,剪应力成对出现,而且,值相等,以此类推,正反面上的应力一样可以相互代替。
所以六个面上的应力可以用三个微分面上的应力表示。
6 相互垂直上的应力之间的关系:一般情况下,z y x σσσ≠≠ 但有:yx xy ττ= zx xz ττ= zy yz ττ=二 质点任意面上的应力和边界条件1 质点的应力状态可用三个相互垂直的微分面上的应力分量表示我们已经知道,两个微分面上的应力可以相互代替,只要知道 三个相互垂直的微分面上的应力分量,也就知道了另三个相互垂直的微分面上的应力分量,设我们已经知道了三个微分面上的应力分量为⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=z zy zx yz y yx xz xy x ij στττστττσσ 若过Q 点任意面上的应力分量能被求出,我们说Q 点的的应力状态可以用⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=z zy zx yz y yx xz xy x ij στττστττσσ表示,为此我们将单元体放入直角坐标系中,使单体的各棱平行于x 、y 、z 轴,过Q 点作任意平面M ,因为质点无大小,只有位置,设法方向为N ,切单元体成为一个四面体,如图所示:该面上的应力如果能够求出,我们说:Q 点的应力状态可以用⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=z zy zx yz y yx xz xy x ij στττστττσσ表示。
1) 求M 面上的全应力设三个相互垂直的微分面上的应力分量为ij σ(可以用三个负微分面上的应力分量表示),高微分面ABC 的面积为dF,法线方向为N ,x 、y 、z 微分面分别为dF x 、dF y 、dF z 那么就有:dFl x N dF dF x ==).cos( 令 l x N =).cos(,m y N =).cos(, n z N =).cos(dFm y N dF dF y ==).cos( dFn z N dF dF z ==).cos(设ABC 微分面上的全应力为S (未知),将S 向三条轴分别投影,它的分量为x S 、y S 、z S ;x S 是S 在x 轴方向的分量,根据静力平衡微分方程∑=0xP0=---z zx y yx x x x dF DF dF dF S ττσdFn dFm dFl dF S zx yx x x ττσ++= ⎪⎭⎪⎬⎫++=++=++=n m l S n m l S n m l S z yz xz z zy y xy y zx yx x x στττστττσ j ji j L S σ=若已知S 的分量:那么:2222z y x S S S S ++= 用张量表示i i S S S =22)求M 面上的正应力和剪应力将S 向ABC 微分面的法线方向投影,即S 向N 方向投影,就等于S 的各个分量在法线N 方向上的投影之和。
n S m S l S z y x n ++=σ=)(22nl mn lm n m l zx yz xy z y x τττσσσ+++++222S n =+στ 222nS στ-=∴由此可解出τ。
由此可见:一点应力状态可以用三个相互垂直的微分面上的应力分量ij σ表示。
以上两式说明:σ 、τ是l 、m 、n 的函数,对于一组l 、m 、n 可以确定一个微分面,而微分面的应力也就随之而确定,随着l 、m 、n 的变化 ,微分面也在变化,微分面上的应力也变化,微分面确定,其上的应力也随之确定 2 应力边界条件:若我们所取的微分面正好是在物体的表面上,外表面上作用的外力T 在x 、y 、z 轴上的投影为T i ,也就是外力在x 、y 、z 方向的分量T i 。
若在外力的作用 下所产生的应力张量ij σ,那么由ij σ求出的S i 应有i i T S = 即 x x T S = y y T S = T S z =。
用张量式表示为:i ij j l T σ= 则称ij σ满足边界条件,并称该式为应力边界条件表达式。
3 应力状态的九个应力分量ij σ是二阶张量。
三 主应力和应力不变量 1 几个基本概念 在三维空间中,任意质点的应力状态可以用该质点单元体上的三个微分面上的应力分量(即应力张量ij σ表示,已知该点的应力张量ij σ,则该点的任意面上的应力分量都可以求得。
1) 主平面:过质点可以做无数个微分面,在这无数个微分面中,总存在这样三个相互垂直的微分面,在这三个微分面上剪应力为零,即:τ=0 ;这样的平面为主平面。
2) 主方向:主平面的三个法线方向为主方向。
3) 主应力:主平面上的正应力为主应力。
4) 主轴:与主方向的方向一致的坐标轴为主轴。
2 主应力和主方向的求解设ABC 面正好是主平面,则该平面上的剪应力为零,即τ=0,只有正应力(即主应力σ),也是全应力S ,S 在x 、y 、z 轴上的投影或者分量为x S 、y S 、z S ;即l N x S x σσ==).cos( 同理:m S y σ= n S z σ= 代入式:⎪⎭⎪⎬⎫++=++=++=n m l S n m l S n m l S z yz xz z zy y xy y zx yx x x στττστττσ得: ⎪⎭⎪⎬⎫++=++=++=n m l n n m l m n m l l z yz xz zy y xy zx yx x σττστστσττσσ ⎪⎭⎪⎬⎫=-++=+-+=++-0)(0)(0)(n m l n m l n m l z yz xz zy y xy zx yx x σστττσστττσσ现在因为主平面和主方向是被求的对象,l 、m 、n 是未知的,σ也是知的,上式是一个以l 、m 、n 为未知量的线性齐次方程组。