有限元教程 弹性力学基础知识2
- 格式:ppt
- 大小:3.24 MB
- 文档页数:38
第一章1、弹性力学的任务是什么弹性力学的任务是分析各种结构物或其构件在弹性阶段的应力和位移,校核它们是否具有所需的强度和刚度,并寻求或改进它们的计算方法。
2、弹性力学的基本假设是什么?为什么要采用这些假设?(1) 假设物体是连续的——物体内部由连续介质组成,物体中没有空隙,因此物体中的应力、应变、位移等量是连续的•可以用坐标的连续函数表示。
实际上,所有的物体均由分子构成,但分子的大小及分子间的距离与物体的尺寸相比是很微小的,故可以不考虑物体内的分个构造。
根据这个假设所得的结果与实验结果是符合的。
(2) 假设物体是匀质的和各向同性的一一物体内部各点与各方向上的介质相同,因此,物体各部分的物理性质是相同的。
这样,物体的弹性常数(弹性模量、泊松比)不随位置坐标和方向而变化。
钢材由微小结晶体组成,晶体本身是各向异性的、但由于晶体很微小而排列又不规则,按其材料的平均性质,可以认为钢材是各向同性的。
木材不是各向同性的。
(3) 假设物体是完全弹性的一一物体在外加因家(裁荷、温度变化等)的作用下发生变形,在外加固素去除后,物体完全恢复其原来形状而没有任何剩余变形。
同时还假定材料服从胡克定律,即应力与形变成正比。
(4) 假设物体的变形是很小的——在载荷或温度变化等的作用下,物体变形而产生的位移,与物体的尺寸相比,是很微小的。
在研究物体受力后的平衡状态时,可以不考虑物体尺寸的改变。
在研究物体的应变时,可以赂去应变的乘积,因此,在微小形变的情况下弹性理论中的微分方程将是线性的。
(5) 假设物体内无初应力一一认为物体是处于自然状态,即在载荷或温度变化等作用之前,物体内部没合应力。
也就是说,出弹性理论所求得的应力仅仅是由于载荷或温度变化等所产生的。
物体中初应力的性质及数值与物体形成的历史有关。
若物体中有韧应力存在,则由弹性理论所求得的应力加上初应力才是物体中的实际应力。
上面基本假设中•假设(4)是属于几何假设,其他假设是属于物理假设。
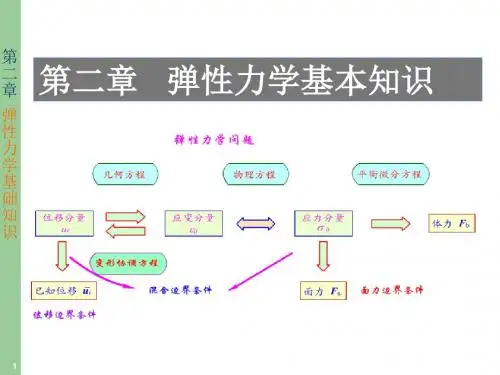
第二章 弹性力学问题有限元方法的一般原理和表达格式 2.1 引言本章将讨论通过弹性力学变分原理建立弹性力学问题有限元法列式的基本步骤。
最小位能原理的未知场变量是位移,以结点位移为基本未知量,并以最小位能为基础建立的有限单元位移元。
它是有限元方法中应用最普遍的单元。
对于一个力学或物理问题,在建立其数学模型以后,用有限元方法对它进行分析的首要步骤是选择单元形式。
平面问题三结点三角形单元是有限元方法最早采用,而且至今仍经常采用的单元形式。
我们将以此作为典型,讨论如何应用广义坐标建立单元位移模式与位移插值函数,以及如何根据最小位能原理建立有限元求解方程的原理、方法与步骤,并进而导出弹性力学问题有限元方法的一般列式。
2.2 弹性力学平面问题的有限元列式2.2.1 单元位移模式及插值函数典型的三结点三角形单元结点编码为i,j,m 。
每个结点有两个位移分量,如图2.2所示。
每个结点的位移可用位移矢量i α表示,即⎥⎦⎤⎢⎣⎡=i i i v u α ),,(m j i每个单元有6个结点位移分量(称为6个自由度),于是单元结点的位移向量可表示为[]Tm m j j i im j i e v u v u v u =⎥⎥⎦⎤⎢⎢⎣⎡=ααααe α为单元结点位移列阵。
1.单元的位移模式和广义坐标在有限元方法中单元的位移模式,是指在单元内位移的插值函数,其一般形式采用多项式作为近似函数,因为多项式运算简单,并且随着项数的增多,可以逼近任何一段光滑的函数曲线。
假设3结点三角形单元位移模式选取一次多项式y x u 321βββ++=y x v 654βββ++= (2.2.1)它的矩阵形式是φβ=u (2.2.2)其中⎥⎦⎤⎢⎣⎡=v u u ,⎥⎦⎤⎢⎣⎡=ϕϕφ00 []y x 1=ϕ[]T 654321βββββββ=由于三个结点也在单元内,满足位移模式,于是得i i i y x u 321βββ++=j j j y x u 321βββ++= (2.2.3) m m m y x u 321βββ++=上式是关于321,,βββ的线性方程组。