第二章:弹性力学基本理论及变分原理
- 格式:doc
- 大小:1.00 MB
- 文档页数:22
静力可能的应力 弹性体的功能关系 功的互等定理 弹性体的总势能 虚应力 应变余能函数 应力变分方程 最小余能原理的近似解法 扭转问题最小余能近似解 有限元原理与变分原理 有限元原理的基本概念 有限元整体分析 第十一章 弹性力学的变分原理几何可能的位移虚位移虚功原理最小势能原理瑞利-里茨 (Rayleigh-Ritz) 法 伽辽金(『anQpKUH )法 最小余能原理 平面问题最小余能近似解 基于最小势能原理的近似计算方法 基于最小余能原理的近似计算方法 有限元单元分析一、内容介绍由于偏微分方程边值问题的求解在数学上的困难,因此对于弹性力学问题, 只能采用半逆解方法得到个别问题解答。
一般问题的求解是十分困难的, 甚至是 不可能的。
因此,开发弹性力学的数值或者近似解法就具有极为重要的作用。
变分原理就是一种最有成效的近似解法,就其本质而言,是把弹性力学的基 本方程的定解问题, 转换为求解泛函的极值或者驻值问题, 这样就将基本方程由 偏微分方程的边值问题转换为线性代数方程组。
变分原理不仅是弹性力学近似解 法的基础,而且也是数值计算方法,例如有限元方法等的理论基础。
本章将系统地介绍最小势能原理和最小余能原理, 并且应用变分原理求解弹 性力学问题。
最后,将介绍有限元方法的基本概念。
本章内容要求学习变分法数学基础知识,如果你没有学过上述课程,请学习 附录3或者查阅参考资料。
知识点、重点1几何可能的位移和静力可能的应力;2、弹性体的虚功原理;3、最小势能原理及其应用;4、最小余能原理及其应用;5、有限元原理的基本概念。
§11.1弹性变形体的功能原理学习思路:本节讨论弹性体的功能原理。
能量原理为弹性力学开拓了新的求解思路,使得基本方程由数学上求解困难的偏微分方程边值问题转化为代数方程组。
而功能关系是能量原理的基础。
首先建立静力可能的应力「:,和几何可能的位移’概念;静力可能的应力和几何可能的位移;可以是同一弹性体中的两种不同的受力状态和变形状态,二者彼此独立而且无任何关系。
弹性力学的变分原理和应用1. 弹性力学的基本原理•弹性力学是研究物体在受力后发生形变,但受力取消后又能恢复原状的力学学科。
•弹性力学的基本原理包括胡克定律、平衡条件和应变能最小原理。
1.1 胡克定律•胡克定律是描述弹性体材料内部应力和应变之间关系的基本规律。
•胡克定律表述为应力与应变之间成正比,且比例系数为弹性模量。
•弹性模量是衡量材料弹性性能的物理参数,常见的有杨氏模量、剪切模量等。
1.2 平衡条件•在弹性力学中,物体达到平衡时需要满足平衡条件。
•平衡条件包括力的平衡条件和力矩的平衡条件。
力的平衡条件要求合外力为零,力矩的平衡条件要求合外力矩为零。
1.3 应变能最小原理•应变能最小原理是变分法在弹性力学中的应用。
•应变能是描述物体变形程度的物理量,应变能最小原理认为在给定边界条件下,物体的平衡状态对应的应变能应该是极小值。
2. 弹性力学的变分原理•变分原理是弹性力学中一种重要的数学方法,用于研究力学系统的平衡和稳定性。
•弹性力学的变分原理主要有广义虚功原理和最小势能原理。
2.1 广义虚功原理•广义虚功原理是描述连续介质力学中变形对象平衡状态的数学表述。
•广义虚功原理要求在满足平衡条件的情况下,任意变形状态与原始状态之间的虚功总和等于零。
•广义虚功原理能够推导出弹性力学的基本方程,如平衡方程和边界条件。
2.2 最小势能原理•最小势能原理是应变能最小原理在弹性力学中的具体应用。
•最小势能原理认为在给定边界条件下,力学系统的平衡状态对应的势能应该是极小值。
•最小势能原理可以通过变分法推导出与广义虚功原理等价的弹性力学方程。
3. 弹性力学的应用•弹性力学在工程和科学研究中有广泛的应用,以下列举其中一些应用领域。
3.1 结构力学•弹性力学在结构力学领域中应用广泛,用于探索材料的力学性能和结构的稳定性。
•结构力学涉及材料的弹性性质、刚度、变形和应力分布等问题,借助弹性力学的原理可以进行合理的设计和分析。
3.2 地质力学•地质力学研究地球内部岩石和土壤的力学性质及其变形行为。
弹性力学的变分原理及其应用弹性力学的基本概念•弹性力学是研究物体在外力作用下产生形变的力学学科。
•弹性力学主要关注物体的弹性变形,即物体在受到外力作用后可以恢复到原始形状的能力。
•弹性力学可以用数学模型来描述物体的变形行为,其中变分原理是一种重要的分析工具。
变分原理的概念•变分原理是数学中的一种重要方法,可以用来求解函数的极值问题。
•在弹性力学中,变分原理是用来求解物体的形变问题的一种方法。
•变分原理通过将弹性力学问题转化为一个变分问题,通过对变分方程进行求解,可以得到物体的形变情况。
弹性力学的变分原理•弹性力学的变分原理基于能量最小化的原理。
•变分原理假设物体的形变状态是能量最小的状态,通过对能量进行变分求解,可以求得物体的形变情况。
•变分原理可以用来推导出弹性力学中的重要方程,如弹性能量密度函数和应力-应变关系等。
变分原理的应用•变分原理在弹性力学中有着广泛的应用。
•变分原理可以用来推导出弹性力学中的基本方程,如胡克定律、拉梅定律和势能函数等。
•变分原理还可以用来求解复杂的边界值问题,如弹性体的静力平衡问题和弹性体的振动问题等。
弹性力学的变分原理应用案例•弹性体的静力平衡问题:通过变分原理可以求解弹性体在给定外力作用下的形变情况,并得到物体的位移场和应力场等信息。
•弹性体的振动问题:通过变分原理可以推导出物体的振动方程,并得到物体的共振频率和振动模态等信息。
•弹性体的材料参数求解:通过变分原理可以推导出物体材料的一些参数,如弹性模量和泊松比等。
总结弹性力学的变分原理是研究物体形变问题的重要方法,并且在弹性力学中有着广泛的应用。
通过对能量的变分求解,可以得到物体的形变情况和应力分布等重要信息。
变分原理不仅可以用来求解弹性体的静态问题,还可以用来求解弹性体的动态问题和材料参数等。
因此,掌握弹性力学的变分原理对于深入理解和应用弹性力学有着重要的意义。
理论力学中的弹性力学与变形分析弹性力学是理论力学的重要分支之一,研究物体在受到外力作用后所发生的变形和应力分布规律。
变形分析是弹性力学中的基本概念,它涉及物体的改变形状和尺寸的过程。
本文将对理论力学中的弹性力学和变形分析进行探讨。
一、弹性力学的基本原理弹性力学的基本原理包括胡克定律、平衡方程和边界条件等。
胡克定律是描述物体线弹性变形的基本理论,即应力与应变之间的线性关系。
胡克定律可以用数学公式表示为:σ = Eε其中σ为物体的应力,E为弹性模量,ε为物体的应变。
平衡方程是弹性力学的基础,它描述了物体在受到外力作用后的平衡状态。
平衡方程可以分为静力学平衡方程和动力学平衡方程。
静力学平衡方程主要包括力的平衡和力矩的平衡两个方面,而动力学平衡方程考虑了物体在外力作用下的加速度和惯性力。
边界条件是指物体表面处的应力和位移与相邻物体或环境的相互作用关系。
边界条件的确定对于解决弹性力学问题非常重要,它涉及到物体与物体之间的相互作用以及物体与外界环境的相互作用。
二、变形分析的基本概念变形分析是弹性力学研究中的重要概念,它描述了物体在受到外力作用后所发生的形状和尺寸的变化。
变形分析主要包括线弹性变形和刚体位移两个方面。
线弹性变形是指当物体受到轴向力作用时,在垂直于该力的方向上发生的形变。
根据胡克定律,线弹性变形与物体的应变成正比。
刚体位移是指物体在受到力作用后整体平移或旋转的位移。
刚体位移描述了物体的整体运动状况,也是变形分析的重要内容。
变形分析也可以通过应变能和势能方法进行求解。
应变能方法是基于物体内部的应变能储存,通过最小化系统总应变能来求解物体的位移和应力分布。
势能方法则是基于物体内部的势能储存,通过最小化总势能来求解物体的位移和应力分布。
这两种方法在弹性力学的应用中被广泛使用。
三、弹性力学与工程应用弹性力学在工程领域有着广泛的应用。
它被用于解决各种与结构和材料有关的问题,如桥梁、建筑、航空航天和机械工程等。

弹性力学简明教程第一章绪论1.弹性力学:又称为弹性理论,是固体力学的一个分支,其中研究弹性体由于受到外力作用、边界约束或温度改变等原因而发生的应力、形变和位移。
2. 作用于物体的外力可以分为两种:一种是分布在物体表面的作用力,例如一个物体对另一物体作用的压力,象水压力等,称做面力;另一种是分布在物体体积内的力,象重力、磁力或运动物体的惯性力等,称为体力。
3.内力:物体本身不同部分之间相互作用的力。
4.弹性力学的基本假定:1假定物体处处连续;2假定物体是完全弹性的;3假定物体是均匀的;4假定物体是各向同性的;5假定位移和形变很小。
(满足前四个为理想弹性体)第二章平面问题的基本理论一、弹性力学空间问题共有应力、应变和位移15个未知函数,且均为。
二、弹性力学平面问题共有应力、应变和位移8个未知函数,且均为。
三、平面应力问题:(1)等厚度的薄板;(2)体力作用于体内,平行于板的中面,沿板厚不变;(3)面力作用于板边,平行于板的中面,沿板厚不变;(4)约束作用于板边,平行于板的中面,沿板厚不变。
四、平面应变问题:(1)很长的常截面柱体;(2)体力作用于体内,平行于横截面,沿柱体长度方向不变;(3)面力作用于柱面,平行于横截面,沿柱体长度方向不变;(4)约束作用于柱面,平行于横截面,沿柱体长度方向不变。
五、挡土墙和很长的管道、隧洞问题,是很接近于平面应变问题。
六、平衡微分方程:七、边界条件--表示在边界上位移与约束,或应力与面力之间的关系。
(分为位移边界条件、应力边界条件、混合边界条件)八、圣维南原理:如果把物体的一小部分边界上的面力,变换为分布不同但静力等效的面力(主矢量相同,对同一点的主矩也相同),那么,近处的应力分量将著的改变,但远处所受的影响可以不计。
九、静力等效─指两者主矢量相同,对同一点主矩也相同;十、圣维南原理表明,在小边界上进行面力的静力等效变换后,只影响近处(局部区域)的应力,对绝大部分弹性体区域的应力没有明显影响。
第二章 变分原理变分原理是力学分析中重要数学工具之一,能量法、有限元法、加权残值法等力学方法都是以变分原理为数学工具的。
变分法的早期思想是Johann Bernoulli 在1696年以公开信的方式提出最速降线命题,并在1697年进行了解决。
关于变分法的一般理论是Euler 于1774年、Lagrange 于1762年共同奠基的,我们称之为Euler-Lagrange 变分原理。
1872年Betti 提出了功的互等定理。
1876年意大利学者Castigor 提出了最小功原理。
德国学者Hellinger 于1914年发表了有关不完全广义变分原理,后来美国学者Reissner 发表了与Hellinger 相类似的工作,此工作被称之为Hellinger-Reissner 变分原理。
我国学者钱令希于1950年发表“余能原理”论文。
我国学者胡海昌于1954年发表了有关广义变分原理的论文,日本学者鹫津久一郎(Washizu)于1955年发表了与有胡海昌相类似的工作,此工作被称之为胡-鹫变分原理。
1956年Biot 建立了热弹性力学变分原理。
1964年钱伟长提出用Lagranger 乘子构造广义 分原理的方法。
1964年Gurtin 提出了线弹性动力学变分原理。
1967年意大利学者Tonti 提出了四类变量的广义变分原理,在这类变分原理中,位移、应变、应力及Beltrami 应力函数都是变分变量。
§ 2.1 历史上著名的变分法命题历史上有三个著名的变分法命题,即最速降线问题、短程线线问题和等周问题。
这三个命题的提出和解决推动了变分法的发展。
1、最速降线命题1695年,Bernoulli 以公开信方式提出了最速降线命题。
如图2-1所示,设有不在同一垂线上的A 、B 两点,在此两点间连一曲线,有一重物沿此曲线下滑,忽略各种阻力的理想情况,什么曲线能使重物沿曲线AB 光滑下滑的时间最短。
设A 点与坐标原点O 重合,B 点的坐标为(x 1,y 1),滑体质量为m ,从O 点下滑至P 点时的速度为v ,根据能量恒原理,有:221mv mgy =(2-1) 用s 表示弧长,则沿弧切向方向的速度为: 图2-1 最速降线图gy dtdsv 2==(2-2) 曲线弧长为:dx dx dy dy dx ds 2221⎪⎭⎫⎝⎛+=+= (2-3)于是,时间为:()dx gyy v ds dt 212'+== (2-4)下降时间为:()⎰⎰+==12'21x Tdx gyy dt T (2-5) 经过求解,最速降线为圆滚线,其参数方程为:()()θθθcos 12sin 2-=-=Cy Cx (2-6)2、短程线命题设()0,,=z y x ϕ是如图2-2所示的曲面,在此曲面上有A 、B 两点,试问如何连接可使此曲面上A 、B 两点间的距离最短。
第二章 弹性体动力学的变分原理§2.1 弹性体动力学的功能概念第一章是从运动学、动力学、物理学等三个方面分析弹性体的各个力学量性质和相互关系,根据动量定理建立它的基本方程。
这一章里将应用能量概念来分析弹性体动力学问题,根据能量变分原理来建立基本方程(控制方程)。
首先介绍外力功、应变能、动能等三个弹性体的能量概念。
2.1.1 外力功的概念弹性体上作用的外力一般地分为两类:一类分布在区域V 内的体积力f i ;一类作用在边界S 上的面积力i i 。
在运动过程中弹性体发生微小位移du i ,外力在微小位移上所作的功,称为外力元功∫∫+=ΔV Si i i i e dS du t dV du f W (2.1) 弹性体在有限位移上外力所和的功是其元功的代数和,即∑Δ=e e W W (2.2) 一般情况下,外力可能是时间、速度和位移等的函数,(2.2)式不一定存在积分形式。
只是外力是位移场变量的函数且具有位,积分形式才有意义。
上述功的的对内力同样适合。
2.1.2 应变能的概念弹性体的弹性性质是由它的本构关系所决定。
它发生变形时,伴随产生力图恢复变形的弹性力,同时在弹性体内贮存一种位能,称为应变能。
在1.5.2节已叙述了它的概念,应变能是个相对值,一般取初始构形(未变形构形)为零应变能构形,瞬时构形的应变能是该瞬时应变分量的函数,是变形过程中弹性恢复力所作的功,是个非负的标量。
它为∫∫==V V kl ij ijkl ij ij ij i dV C dV U εεεσε2121)( (2.3)它的一个重要特性是弹性体应变能与变形过程无关,取决于当时的应变状态。
从热力学观点看,若弹性体变形过程是一个绝热过程,即它是与外界没有热交换的等熵可逆过程,它的应变能就是弹性体的内能。
若弹性体变形过程是等温过程,则它的应变能是弹性体的自由能。
2.1.3 动能的概念弹性体的惯性性质是弹性体的运动属性。
它运动产生速度时,弹性体就具有一种运动能量,称为动能。
第二章 弹性力学基本理论及变分原理弹性力学是固体力学的一个分支。
它研究弹性体在外力或其他因素(如温度变化)作用下产生的应力、应变和位移,并为各种结构或其构件的强度、刚度和稳定性等的计算提供必要的理论基础和计算方法。
本章将介绍弹性力学的基本方程及有关的变分原理。
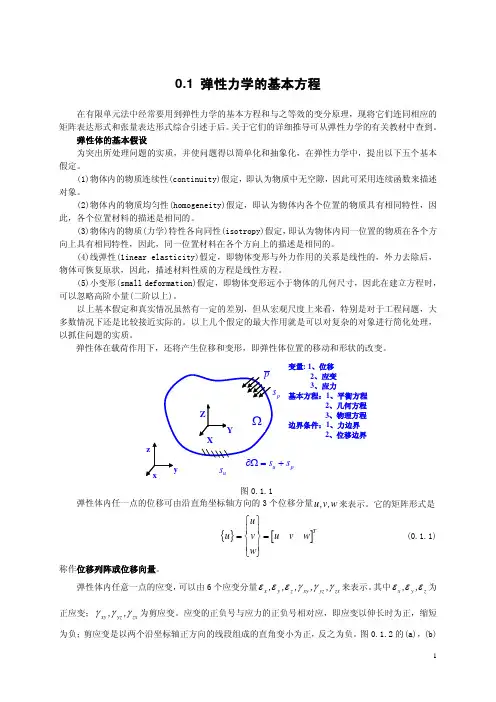
§2.1小位移变形弹性力学的基本方程和变分原理在结构数值分析中,经常用到弹性力学中的定解问题及与之等效的变分原理。
现将它们连同相应的矩阵形式的张量表达式综合引述于后,详细推导可参阅有关的书籍。
§2.1.1弹性力学的基本方程的矩阵形式弹性体在载荷作用下,体内任意一点的应力状态可由6个应力分量表示,它们的矩阵表示称为应力列阵或应力向量111213141516222324252633343536444546555666x x y y z z xy xy yz yz zx zx D D D D D D D D D D D D D D D D D D D D D σεσεσετγτγτγ⎧⎫⎡⎤⎧⎫⎪⎪⎢⎥⎪⎪⎪⎪⎢⎥⎪⎪⎪⎪⎢⎥⎪⎪⎪⎪⎪⎪=⎢⎥⎨⎬⎨⎬⎢⎥⎪⎪⎪⎪⎢⎥⎪⎪⎪⎪⎢⎥⎪⎪⎪⎪⎢⎥⎪⎪⎪⎪⎩⎭⎣⎦⎩⎭ (2.1.1) 弹性体在载荷作用下,将产生位移和变形,弹性体内任意一点位移可用3个位移分量表示,它们的矩阵形式为[]T u u v u v w w ⎧⎫⎪⎪==⎨⎬⎪⎪⎩⎭(2.1.2)弹性体内任意一点的应变,可由6个应变分量表示,应变的矩阵形式为x y Tz xy z xy yz zx xy yz zx εεεσεεεγγγγγγ⎧⎫⎪⎪⎪⎪⎪⎪⎪⎪⎡⎤==⎨⎬⎣⎦⎪⎪⎪⎪⎪⎪⎪⎪⎩⎭(2.1.3)对于三维问题,弹性力学的基本方程可写成如下形式 1 平衡方程0xy x zx x f x y z τστ∂∂∂+++=∂∂∂ 0xy y zy y f xyzτστ∂∂∂+++=∂∂∂0yz zx zz f x y zττσ∂∂∂+++=∂∂∂ x f 、y f 和z f 为单位体积的体积力在x 、y 、z 方向的分量。
平衡方程的矩阵形式为0A f σ+= (在V 内) (2.1.4)其中A 是微分算子000000000x y z A y x z z y x ⎡⎤∂∂∂⎢⎥∂∂∂⎢⎥⎢⎥∂∂∂=⎢⎥∂∂∂⎢⎥⎢⎥∂∂∂⎢⎥∂∂∂⎣⎦体积力向量Txyz f f f f ⎡⎤=⎣⎦2 几何方程——位移~应变关系在小变形情况下,几何关系为x u x ε∂=∂ y v y ε∂=∂ z wzε∂=∂xy yx u v y x γγ∂∂=+=∂∂ yz zy v w z y γγ∂∂=+=∂∂ zx xz u wz xγγ∂∂=+=∂∂ (2.1.5)几何关系矩阵形式为Lu ε= (在V 内) (2.1.6)其中算子L 为000000000Tx y z L A y x z y zx ∂⎡⎤⎢⎥∂⎢⎥∂⎢⎥⎢⎥∂⎢⎥∂⎢⎥⎢⎥∂==⎢⎥∂∂⎢⎥⎢⎥∂∂⎢⎥∂∂⎢⎥⎢⎥∂∂⎢⎥∂∂⎢⎥⎢⎥∂∂⎣⎦3 物理方程——应力~应变关系对于各向同性的线弹性材料,应力通过应变的表达式可以用矩阵形式表达D σε= (2.1.7)其中100011100011000(1)1200(1)(12)2(1)1202(1)122(1)v v v v v v E v v D v v v v v v v ⎡⎤⎢⎥--⎢⎥⎢⎥⎢⎥-⎢⎥⎢⎥-⎢⎥-==⎢⎥+--⎢⎥⎢⎥-⎢⎥-⎢⎥⎢⎥-⎢⎥-⎣⎦D 称为弹性矩阵,它取决于弹性体的弹性模量E 和泊松系数v ,D 也可以采用拉梅(Lam ’e )常数G 和λ表示2(1)E G v =+, (1)(12)Evv v λ=+-对称注意到(1)2(1)(12)E v G v v λ-+=+-,则独立的弹性常数只有两个。
物理方程的另一表达式为C εσ= (2.1.8)C 为柔度矩阵,1CD -=。
4 边界条件弹性体V 的全部边界条件为S ,边界1S 上的位移已知,而2S 上的作用力是已知,且12S S S +=。
在1S 上,弹性体的位移已知,为u 、v 、w ,则有u u v v w w === v v = w w =用矩阵形式表示u u = (在1S 上) (2.1.9) 在2S 上,x x y xy z zx xx xy y y z zy y x xz y zy z z zn n n T n n n T n n n T στττστττσ++=++=++= (2.1.10)采用矩阵形式,则为n T σ= (2.1.11)其中边界外法线n r用矩阵表示为000000000x y z y x z zy z n n n n n n n n n n ⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦Tx y z T T T T ⎡⎤=⎣⎦综上所述,弹性力学方程记作矩阵形式为平衡方程 0A f σ+= (在V 内) 几何方程 Lu ε= (在V 内) 物理方程 D σε= (在V 内) 力边界条件 n T σ= (在2S 上) 位移边界条件 u u = (在1S 上) 并且12S S S +=,S 为弹性全的全部边界条件。
5 弹性体的应变能和余能单位体积的应变能(应变能密度)1()2T U D εεε= (2.1.12)应变能是个正定函数。
单位体积的余能(余能密度)为1()2T V C σσσ= (2.1.13)余能也是个正定函数,在线弹性体中()()U V εσ=。
§2.1.2 弹性力学基本方程的张量形式弹性力学基本方程均可用张量表示,笛卡尔张量是广义曲线坐标系张量中最简单的特例,本文采用笛卡尔张量符号表示,有关张量的知识可参阅本文附录A 。
在直角坐标系(1,2,3)i x i =中,应力张量和应变张量都是对称的二阶张量,分别表示为ij σ和ij ε,且有ij ji σσ=,ij ji εε=。
体积张量、面积张量和位移张量都是一阶张量,用i f 、i T 和i u 表示。
1 平衡方程,0ji j i f σ+= (在V 内) (2.1.14)其中()(),j jx ∂=∂。
2 几何方程1(,,)2ij i j j i u u ε=+ (在V 内) (2.1.15)其展开形式为1111u x ε∂=∂ 2222ux ε∂=∂ 3333u x ε∂=∂1212212112u u x x εε⎛⎫∂∂=+=⎪∂∂⎝⎭ 3223323212u u x x εε⎛⎫∂∂=+= ⎪∂∂⎝⎭ 3131131312u u x x εε⎛⎫∂∂=+= ⎪∂∂⎝⎭此处应注意的是:11x εε= 22y εε= 33z εε=1212xy εγ= 2312yz εγ= 3112zx εγ=3 物理方程广义虎克定律可表示为ij ijkl kl D σε= (在V 内) (2.1.16)ijkl D 是四阶张量,代表了81个弹性常数,由于ij σ和kl ε的对称性,则ijkl D 的前面和后面两个指标分别是对称的,即ijkl jikl D D = ijkl jilk D D =在考虑了对称性后,对于各向异性弹性体,81个弹性常数中仅有21个是独立的;而对于各向同性弹性材料,独立的弹性常数仅有两个,即Lam ’e 常数G 和λ或E 和v ,此时可以简化为2ijkl ik jl ij kl D G δδλδδ=+ (2.1.17)广义虎克定律也可表示为2ij ij ij kk G σελδε=+ (2.1.18)其中ij δ为Kroneeker 符号10ij i ji j δ=⎧=⎨≠⎩(2.1.18)的展开式为11111122332()G σελεεε=+++22221122332()G σελεεε=+++ 33331122332()G σελεεε=+++12122G σε= 23232G σε= 31312G σε=物理方程也可写为ij ijkl kl C εσ=4 边界条件 力边界条件i ij j T n σ= (在2S 上) (2.1.19)位移边界条件i i u u = (在1S 上) (2.1.20)5 应变能和余能 1()2mn ijkl ij kl U D εεε=(2.1.21) 和1()2mn ijkl ij kl V C σσσ= (2.1.22)§2.1.3平衡方程和几何方程的等效积分“弱”形式——虚功原理变形体的虚功原理:变形体中满足平衡的力系在任意满足协调条件的变形状态上作的虚功等于零,即系统外力的虚功与内力的虚功之和等于零。
虚功原理是虚位移原理和虚应力原理的总称,虚位移原理是平衡方程和力的边界 条件的等效积分弱形式;虚功原理则是几何方程和位移边界条件的等效积分弱形式。
1 虚位移原理平衡方程和力的边界条件为,0ij j i f σ+= (在V 内)0ij j i n T σ-= (在2S 上)取权函数W u δ=,则有()()2,0iji i ijj i i VS j f u dV n T u dS σδσδ+--=⎰⎰(2.1.23)对上式体积积分中的第一项进行分部积分,并注意到ij ji σσ=,以及在1S 上0i u δ=和()1,,2i j j i ij u u δδδε+=则有 ()221,,,2i ij j i ij j i j j i ij V S V i ij j ij ij S Vu dV u n dS u u dV u n dS dVδσδσδδσδσδεσ=-+=-⎰⎰⎰⎰⎰ (2.1.24)将上式代回(2.1.23)中,就得到它经分部积分后的弱形式。
()20ijiji i i VS u f dV u TdS δεσδδ-++=⎰⎰ (2.1.25)上式积分中的第一项是变形体内的应力在虚应变上所作的功,即内力的虚功;第二项及第三项积分分别是体积力和面积力在虚位移上所作的功,即外力的虚功。
内力的虚功和外力的虚功总和为零,这就是虚功原理。
此虚功原理是外力和内力分别在虚位移和与之相协调的虚应变上所作的功。
故此为虚功原理中的虚位移原理。
它是平衡方程和力的边界条件的等效弱形式。
对此虚位移原理有必要进一步作以下几点说明: (1)在物理意义上,如果力系(ij σ、i f 和i T )是平衡的(即在内部满足,0ij j i f σ+=,在2S 上满足ij j i n T σ=),则它们在给定的虚位移(在1S 上满足0i u δ=)和虚应变上(()1,,2ij i j j i u u δεδδ=+)所作的功的总和为零。
反之,如果力系在虚位移(及虚应变)上所作的功之和等于零,则它们一定满足平衡,所以虚位移原理表达了力系平衡的必要充分条件。
(2) 作为平衡方程和力边界条件的等效积分弱形式,虚功原理的建立是从选择在1S 上满足边界条件和几何关系的函数为条件的。