MR-J3-A系列伺服放大器培训教程
- 格式:pdf
- 大小:2.20 MB
- 文档页数:65

与MR-J3伺服通讯参数设置:波特率:9600bps起始位:1位数据位:8位校验位:1位(偶校验)停止位:1位通信协议:半双工通信方式站号:0号(PC20=0,PC21=0000)一、外部输入输出信号状态(DIO诊断)1.输入软元件的状态发送:01 30 31 32 02 30 30 03 46 38返回:02 30 41 30 30 30 39 30 30 30 36 03 30 332.外部输入针脚状态的读出发送:01 30 31 32 02 34 30 03 46 43返回:02 30 41 30 30 30 30 30 31 34 46 03 30 463.读出通过通信置ON的输入软元件的状态发送:01 30 31 32 02 36 30 03 46 45返回:02 30 41 30 30 30 30 30 30 30 30 03 46 344.读出外部输出针脚状态发送:01 30 31 32 02 43 30 03 30 42返回:02 30 41 30 30 30 30 30 30 33 46 03 30 445.读出输出软元件的状态发送:01 30 31 32 02 38 30 03 30 30返回:02 30 41 30 30 30 30 30 34 32 44 03 30 45二、软元件的ON/OFF1.转速控制模式下-SON、LSP、LSN、SP2、ST2置为ON发送:01 30 39 32 02 36 30 30 30 30 30 31 32 30 37 03 39 30返回:02 30 41 03 37 342.转速控制模式下-LSP、LSN、SP2、ST2置为ON,SON置为OFF发送:01 30 39 32 02 36 30 30 30 30 30 31 32 30 36 03 38 46返回:02 30 41 03 37 34三、输入输出软元件(DIO)的禁止与解除1.DI禁止发送:01 30 39 30 02 30 30 31 45 41 35 03 45 41返回:02 30 41 03 37 342.DI解除禁止发送:01 30 39 30 02 31 30 31 45 41 35 03 45 42返回:02 30 41 03 37 343.DO禁止发送:01 30 39 30 02 30 33 31 45 41 35 03 45 44返回:02 30 41 03 37 344.DO解除禁止发送:01 30 39 30 02 31 33 31 45 41 35 03 45 45返回:02 30 41 03 37 34四、状态显示1.状态显示的名称和单位的读出00 反馈脉冲累积发送:01 30 30 31 02 30 30 03 46 36返回:02 30 41 20 20 70 75 6C 73 65 50 75 6C 73 65 20 46 2F 42 03 42 44 01 伺服电机的转速发送:01 30 30 31 02 30 31 03 46 37返回:02 30 41 20 20 72 2F 6D 69 6E 53 70 65 65 64 20 46 2F 42 03 36 31 02 滞留脉冲发送:01 30 30 31 02 30 32 03 46 38返回:02 30 41 20 20 70 75 6C 73 65 44 72 6F 6F 70 20 50 6C 73 03 33 30 03 指令脉冲累积发送:01 30 30 31 02 30 33 03 46 39返回:02 30 41 20 20 70 75 6C 73 65 50 75 6C 73 65 20 43 6D 64 03 31 41 04 指令脉冲频率发送:01 30 30 31 02 30 34 03 46 41返回:02 30 41 20 20 20 6B 70 70 73 50 75 6C 73 65 20 46 72 71 03 45 34 05 速度指令电压发送:01 30 30 31 02 30 35 03 46 42返回:02 30 41 20 20 20 76 6F 6C 74 53 70 65 65 64 20 43 6D 64 03 42 45 06 模拟量转矩限制电压发送:01 30 30 31 02 30 36 03 46 43返回:02 30 41 20 20 20 76 6F 6C 74 54 72 71 20 4C 69 6D 69 74 03 45 46 07 再生负载率发送:01 30 30 31 02 30 37 03 46 44返回:02 30 41 20 20 20 20 20 20 25 52 65 67 6E 20 4C 6F 61 64 03 38 35 08 实际负载率发送:01 30 30 31 02 30 38 03 46 45返回:02 30 41 20 20 20 20 20 20 25 45 66 66 63 20 4C 6F 61 64 03 36 44 09 最大负载率发送:01 30 30 31 02 30 39 03 46 46返回:02 30 41 20 20 20 20 20 20 25 50 65 65 6B 20 4C 6F 61 64 03 37 45 0A 瞬时输出转矩发送:01 30 30 31 02 30 41 03 30 37返回:02 30 41 20 20 20 20 20 20 25 49 6E 73 74 6E 20 54 72 71 03 42 43 0B 1转内位置发送:01 30 30 31 02 30 42 03 30 38返回:02 30 41 20 20 70 75 6C 73 65 43 79 63 20 70 6F 73 69 74 03 34 42 0C ABS计数器发送:01 30 30 31 02 30 43 03 30 39返回:02 30 41 20 20 20 20 72 65 76 41 62 73 20 63 6F 75 6E 74 03 41 30 0D 负载惯量比发送:01 30 30 31 02 30 44 03 30 41返回:02 30 41 20 20 20 20 20 20 20 4D 6F 6D 65 6E 74 20 52 74 03 41 41 母线电压0E 发送:01 30 30 31 02 30 45 03 30 42返回:02 30 41 20 20 76 6F 6C 74 20 50 2D 4E 20 56 6F 6C 74 20 03 34 39 2.状态显示数据的读出80 反馈脉冲累积发送:01 30 30 31 02 38 30 03 46 45返回:02 30 41 30 30 30 30 43 36 41 45 37 37 36 44 03 31 4281 伺服电机的转速发送:01 30 30 31 02 38 31 03 46 46返回:02 30 41 30 30 30 30 46 46 46 46 46 46 39 35 03 34 36 82 滞留脉冲发送:01 30 30 31 02 38 32 03 30 30返回:02 30 41 30 30 30 30 30 30 30 30 30 30 30 30 03 42 34 83 指令脉冲累积发送:01 30 30 31 02 38 33 03 30 31返回:02 30 41 30 30 30 30 30 30 30 30 30 30 30 30 03 42 34 84 指令脉冲频率发送:01 30 30 31 02 38 34 03 30 32返回:02 30 41 30 30 30 30 30 30 30 30 30 30 30 30 03 42 34 85 速度指令电压发送:01 30 30 31 02 38 35 03 30 33返回:02 30 41 30 30 33 30 46 46 46 46 46 46 46 43 03 36 34 86 模拟量转矩限制电压发送:01 30 30 31 02 38 36 03 30 34返回: 02 30 41 30 30 30 30 30 30 30 30 30 30 30 30 03 42 34 87 再生负载率发送:01 30 30 31 02 38 37 03 30 35返回:02 30 41 30 30 30 30 30 30 30 30 30 30 30 30 03 42 34 88 实际负载率发送:01 30 30 31 02 38 38 03 30 36返回:02 30 41 30 30 30 30 30 30 30 30 30 30 30 35 03 42 39 89 最大负载率发送:01 30 30 31 02 38 39 03 30 37返回:02 30 41 30 30 30 30 30 30 30 30 30 30 30 39 03 42 44 8A 瞬时输出转矩发送:01 30 30 31 02 38 41 03 30 46返回:02 30 41 30 30 30 30 30 30 30 30 30 30 30 31 03 42 35 8B 1转内位置发送:01 30 30 31 02 38 42 03 31 30返回:02 30 41 30 30 30 30 30 30 30 30 38 39 31 35 03 43 42 8C ABS计数器发送:01 30 30 31 02 38 43 03 31 31返回:02 30 41 30 30 30 30 46 46 46 46 45 35 31 32 03 32 398D 负载惯量比发送:01 30 30 31 02 38 44 03 31 32返回:02 30 41 30 30 32 30 30 30 30 30 30 30 34 36 03 43 30 8E 母线电压发送:01 30 30 31 02 38 45 03 31 33返回:02 30 41 30 30 30 30 30 30 30 30 30 31 33 35 03 42 44五、参数1.指定参数组基本设定参数(PA**)发送:01 30 38 35 02 30 30 30 30 30 30 03 43 32返回:02 30 41 03 37 34增益。

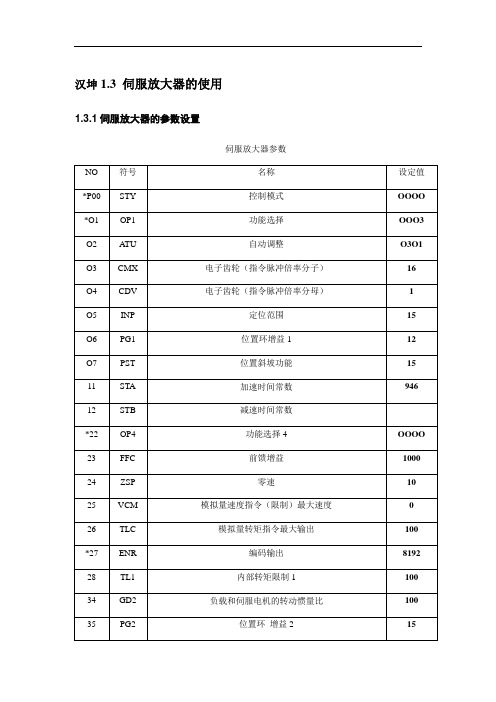
汉坤1.3 伺服放大器的使用1.3.1伺服放大器的参数设置伺服放大器参数注:以上参数仅供参考,详细细节请查阅伺服放大器说明书1.3.2 伺服电机的控制伺服电机正常运行必须具备的条件:1、LSP、LSN必须处于常闭状态2、ALM、EMG处于常闭3、SON为1时电机才能运动,此时电机处于制动状态,推不动,SON为0,可以推动电机。
4、CN1A、CN1B、编码器插头必须正确插入到伺服放大器上。
注:LSP、LSN、SON如果硬件条件不满足,可以在伺服控制器内部设置成1。
但是在系统正常运行后,必须采用外部硬件来满足,不可采用内部置1。
伺服放大器电子齿轮比的设定:即NO3,NO4的设定,该系统中,NO4设定为1,NO3=131072/NO27.1.3.3 伺服电机常见的问题●伺服放大器的的参数NO.2一般设置为0201即自动调整模式,此时相应NO.6,NO35,NO36,NO37,NO38的参数自动调整,如果在运动过程中电机发出嗡嗡的响声,可能是伺服放大器的参数设置不当所致。
可把伺服放大器的参数NO.2该为0301手动模式,手动调整各个参数。
●由于伺服电机是靠脉冲控制,所以要尽量避免变频器干扰。
变频器选型时可考虑增加虑波器。
●调试过程中如果发现小车运动的反向与实际反向不符时,即电机正向,实际为反向,电机反向实际为正向,此时修改伺服放大器的NO.54 改变伺服电机的旋转反向。
注:其他报警请参阅伺服放大器说明书。
说明书已经很详尽的将所有可能出现的报警列出以及其排除故障。
1.3.4伺服电机的接线定位模块FM353实现伺服电机的定位。
其引脚定义如下。
伺服放大器CN1A接线颜色定义线型:6对双绞加一对双绞带屏蔽,外加总体屏蔽。
伺服放大器CN1B接线颜色:线型:6对双绞加一对双绞带屏蔽,外加总体屏蔽。
建议将EMG.No.15与SERVO ALRAM No.18采用双绞。
LSP No.16与LSN No.17采用双绞。
1.电源线航空插头:线型:YZ3×4+1×2.5 (自带10米电缆)2.伺服电机放大器编码器电缆规格:MR-JHSCBL-10M-L(自带的10米电缆)线型:8芯0.25多股双绞带屏蔽。

三菱伺服培训教材第一章概要1.1 运动控制器的特点1.2.1 实模式概略1.2.2 实模式框图1.3.1 虚模式概略1.3.2虚模式框图1.4系统建立步骤1.5小结1.1 运动控制器的特点1、QPLC CPU 和多CPU系统复杂的伺服控制由Q MOTION CPU 模块进行处理,其他的机械控制,过程控制由QPLC CPU负责2、符合多用途的产品Q172CPU 1~8轴的多轴定位功能Q173CPU 1~32轴的多轴定位功能3、可与伺服放大器进行高速的串行通讯通过SSCNET网络进行高速通讯,可进行伺服数据收集、参数变更、伺服测试、伺服监控、机械言程序监控。
4、可实现绝对位置系统通过带有绝对位置编码器的伺服马达可以实现绝对位置定位。
5、操作系统(OS)可变更根据不同的工艺控制要求,可以选择对应适用的OS版本•SV13 用于搬运及组装。
如搬运机、注塑机、涂装机等•SV22用于自动机。
如同步控制,食品、包装等•SV43用于机床行业•SV51用于机械手6、凸轮软件(仅用于SV22)将机械机构中常用的凸轮机构以伺服马达控制,变换为虚拟模式的凸轮输出。
7、机械支持语言(仅用于SV22)将运动从原来的机械性的整合解放出来,通过软件对机械机构的运动控制器进行处理,从而执行伺服马达的控制,可以提高定位控制的功能和性能,通过电气化的方式减少机械结构上的制约,达到更合理的设计效果。
减少系统成本。
1.5小结第二章功能说明2.1 运动控制器规格2.2运动控制器的系统配置2.2.1 Q173CPU2.2.2 Q172CPU2.2.3 Q172LX/EX2.2.4 Q173PX2.3小结2.3小结本章主要说明的Q运动控制器系统的硬件组成、Q172/Q173CPU之间的功能比较以及运动控制器专用模块的功能说明第三章多CPU系统3.1多CPU系统概述3.2多CPU的安装位置3.2.1多CPU输入输出编号3.3 共享存储器的自动刷新3.4 多CPU运动控制器专用指令3.4 .1 SFC程序启动命令SFCS3.4 .2 SFC程序启动命令SVST3.4 .3 值变更命令CHGA/CHGV/CHGT3.4 .4 软元件读取/写入DDWR/DDRD3.5 小结3.1多CPU系统概述多CPU系统将多台(最多4台)QPLC CPU/Q Motion CPU 安装在基板上,由各QPLC CPU/ Q Motion CPU 对输入输出模块,智能模块进行控制的系统。