三菱伺服放大器内部故障处理方法
- 格式:doc
- 大小:52.00 KB
- 文档页数:7
![三菱伺服故障代码处理[1]](https://uimg.taocdn.com/28c4867ba216147916112866.webp)

三菱J2S伺服放大器维修技术与维修实例分析作者:邢涛来源:《硅谷》2011年第01期摘要:以三菱MR-J2S-200A伺服放大器为例,着重介绍三菱MR-J2S伺服放大器的常见故障模式和故障的诊断、维修方法,并列举两个典型的故障维修实例,对伺服放大器的故障维修具有指导及借鉴作用。
关键词:三菱;MR-J2S;伺服放大器;维修技术中图分类号:TH17文献标识码:A文章编号:1671-7597(2011)0110024-010 引言当前交流伺服系统由于其重量轻、效率高、噪音低、输出力矩大和可靠性高等一系列优点,在工控传动领域得到越来越广泛的应用。
在有高精度要求的诸多数控设备中,执行机构都是由伺服放大器驱动伺服电机来实现的。
从运行经验看,整个数控系统中,由于伺服放大器与执行电机等直接相连,是弱电与强电的接口,其发生故障的频率较之其它控制部件更高。
因此伺服放大器故障的诊断和及时有效的维修对于保证整个数控系统的正常使用有着至关重要的意义。
1 伺服放大器的常见故障模式及处理措施1.1 参数设置类故障。
伺服放大器的使用过程中,伺服放大器的参数设置非常重要,如参数设置不正确,会导致控制效果不好,甚至伺服系统不能正常运行。
一般对于新购设备或者控制环境发生改变的情况下,电机运行出现振动、过压过流报警等异常情况时,首先需要考虑参数设置不匹配的情况。
所以在遇到伺服放大器报警时,首先需要了解这是否是一个新购设备,然后了解在故障发生前是否存在更换了伺服电机、改变了机械传动机构或者驱动负载等情况,如果存在这种情况,则会导致伺服放大器驱动功率不同,需要根据实际情况对相应的参数进行重新设置。
1.2 过电压故障。
伺服放大器的过电压指的是直流母线的电压过高。
正常情况下,伺服放大器的直流电是三相全波整流后的平均值。
三菱MR-J2S-200A伺服放大器采用的是220V三相交流电源输入,则整流后的直流电压为300V左右,当直流电压达到400V以上会导致伺服放大器过电压保护动作而引发报警。
伺服放大器故障维修方法
若伺服放大器出现故障,可以尝试以下维修方法:
1. 检查电源:确保电源供应正常,并且没有电压波动或断电问题。
2. 检查连接:检查伺服放大器与伺服马达之间的连接,确保连接稳固无松动。
3. 检查电缆:检查伺服放大器与伺服马达之间的电缆,确保没有损坏或断开。
如果有问题,需要修复或更换电缆。
4. 清洁和检查散热系统:伺服放大器通常会有散热系统,确保散热片或风扇没有灰尘堵塞,并保持良好的散热。
5. 检查参数设置:检查伺服放大器的参数设置,确保设置正确,并与伺服马达的参数匹配。
6. 替换故障组件:如果以上方法都无效,可能需要替换伺服放大器中的故障组件,例如电路板、电容器等。
7. 测试和调试:在进行维修后,进行必要的测试和调试,以确保伺服放大器正常工作。
如果以上维修方法无法解决故障,建议联系专业维修人员进行处理。

第8章 故障排除要点请在发生报警的同时,关闭SON (伺服开启) 并切断电源。
[AL. 37 参数异常]及警告 ([AL. F0 警告] 除外)不记录在报警历史中。
8.1 报警・警告一览表运行中发生异常时会显示报警和警告。
当发生报警以及警告时,请按照8.2节,8.3节的内容进行适当的处理。
在发生报警时,ALM (故障) 将会关闭。
将[Pr. PD34] 设置为 “_ _ _ 1” 时,可以输出报警代码。
报警代码通过0位 ~ 2位的开启/关闭进行输出。
警告 ([AL. 91] ~ [AL. F3]) 没有报警代码。
表中的报警代码在报警发生时输出。
正常时不输出报警代码。
排除原因后,通过报警解除栏中的任意一种方法能够解除报警。
排除发生原因后,自动解除警告。
停止方式中记载为SD的报警以及警告在强制停止减速后使用动力制动停止。
停止方式中记载为BD 的报警以及警告为不进行强制停止减速即使用动力制动停止。
表8.1 报警一览表注 1.请在排出发生的原因后再保留大约30分的冷却时间。
2.停止方式有DB和SD两种。
・DB: 动态制动停止・SD: 强制停止减速3. [Pr. PA04] 为初始值时。
SD的报警可以在[Pr. PA04] 中将停止方式变更为DB。
4. 要解除报警时,关闭电源后,确认显示部的5位7段LED熄灭之后再开启电源。
表8.2 警告一览表注 1. 在排除发生的原因之后,再保留大约30分钟的冷却时间。
2. 停止方式有DB和SD两种。
・DB: 动态制动停止・SD: 强制停止减速3. [Pr. PA04] 为初始值时。
标记为SD的警告可以在[Pr. PA04] 中将停止方式变更为DB。
4. 可以在 [Pr. PD30] 中选择紧急停止或者缓慢停止。
8.2 报警处理方法要点在发生以下报警时,请勿在解除报警后再次重新运行。
否则有可能会导致伺服放大器及伺服电机出现故障。
在排除发生的原因的同时,请保留30分以上的冷却时间然后再重新开始运行。
三菱伺服放大器内部故障处理方法AL.24 主电路异常伺服电机输出端(U·V·W相)接地故障。
<主要原因><处理方法>·在主电路端子(TE1)上电源输入和输出接线有断路。
→修理电线。
·伺服电机动力线表面损坏。
→更换电线。
·伺服放大器主电路故障。
→更换伺服放大器。
制动电流超过内置再生制动电阻或再生制动选件的允许值。
再生制动晶体管异常。
内容:制动电流超过内置再生制动电阻或再生制动选件的允许值。
<主要原因><处理方法>·参数No.0设定错误。
→正确设定参数No.0 。
·未连接内置的再生制动电阻或再生制动选件。
→正确接线。
·电源电压异常(260V以上)。
→检查电源。
·高频度或连续再生制动运行使再生电流超过了内置再生制动电阻或再生制动选件的允许值。
→降低制动频度。
→更换容量大的再生制动电阻或再生制动选件。
→减小负载。
内容:再生制动晶体管异常。
<主要原因><处理方法>·内置再生制动电阻或再生制动选件故障。
→更换伺服放大器或再生制动选件。
·再生制动晶体管故障。
→更换伺服放大器。
AL.25 绝对位置数据丢失电池连接线松动或电压偏低AL.30 再生报警检查再生能耗电路、减小负载AL.31 超速转速超出了瞬时允许转速。
<主要原因><处理方法>·指令输入脉冲频率过高。
→正确设定指令脉冲频率。
·加减速时间过小导致超调过大。
→增大加减速时间常数。
·伺服系统不稳定导致超调。
→重新设定增益。
不能重新设定增益的场合:①负载转动惯量比设定的小一些。
②重新检查加减速时间常数的设定。
·电子齿轮比太大。
(参数No.3、No.4) →正确设定。
·编码器故障。
→更换伺服电机。
参数No.3有*标记的参数,设定后需将电源断开,再重新接通电源,参数才会生效。
电子齿轮(指令脉冲倍率分子)电子齿轮设定错误可能导致错误运行,必须在伺服放大器停止输出的状态下进行设定。
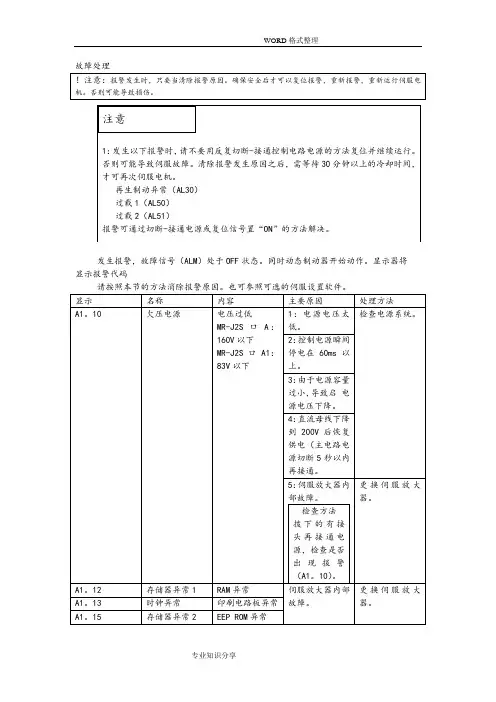
三菱伺服放大器内部故障处理方法(仅供参考)AL.10 欠压电源电压过低。
MR-E-□A:160V 以下<主要原因><处理方法>·电源电压太低。
→检查电源系统·控制电源瞬间停电在60ms以上。
→检查电源系统·由于电源容量过小,导致启动时电源电压下降。
→检查电源系统·电源切断5秒以内再接通。
→检查电源系统·伺服放大器内部故障。
→更换伺服放大器AL.12 存储器异常1、→更换伺服放大器AL.13 时钟异常、→更换伺服放大器AL.14 看门狗异常、→更换伺服放大器AL.15 存储器异常2 →更换伺服放大器AL.12:RAM ROM异常AL.13:印刷电路板异常AL.14:CPU异常AL.15:EEPROM异常<主要原因><处理方法>·伺服放大器内部故障。
→更换伺服放大器。
AL.16 编码器异常1编码器和伺服放大器之间通讯异常。
<主要原因><处理方法>·接头CN2没有连接好。
→正确接线。
·编码器故障。
→更换伺服电机。
·编码器电缆故障。
(断路或短路) →修理或更换电缆。
·伺服放大器和伺服电机之间配合有误。
→使用正确的配合AL.17 电路板异常2、AL.19 存储器异常3AL.17:CPU·零部件异常AL.19:ROM存储器异常<主要原因><处理方法>·伺服放大器内部故障。
→更换伺服放大器。
AL.1A 电机配合异常伺服放大器和伺服电机之间配合有误。
<主要原因><处理方法>·伺服放大器和伺服电机之间的配合有误。
→使用正确的配合。
·参数No.0选择的伺服电机与当前使用的伺服放大器不匹配。
→正确设定参数No.0。
AL.20 编码器异常2编码器和伺服放大器之间通讯异常。
<主要原因><处理方法>·编码器接头CN2没有连接好。
→正确接线。
·编码器电缆故障(断路或短路) →修理或更换电缆·编码器故障。
→更换伺服电机。
AL.24 主电路异常伺服电机输出端(U·V·W相)接地故障。
<主要原因><处理方法>·在主电路端子(TE1)上电源输入和输出接线有断路。
→修理电线。
·伺服电机动力线表面损坏。
→更换电线。
·伺服放大器主电路故障。
→更换伺服放大器。
制动电流超过内置再生制动电阻或再生制动选件的允许值。
再生制动晶体管异常。
内容:制动电流超过内置再生制动电阻或再生制动选件的允许值。
<主要原因><处理方法>·参数No.0设定错误。
→正确设定参数No.0 。
·未连接内置的再生制动电阻或再生制动选件。
→正确接线。
·电源电压异常(260V以上)。
→检查电源。
·高频度或连续再生制动运行使再生电流超过了内置再生制动电阻或再生制动选件的允许值。
→降低制动频度。
→更换容量大的再生制动电阻或再生制动选件。
→减小负载。
内容:再生制动晶体管异常。
<主要原因><处理方法>·内置再生制动电阻或再生制动选件故障。
→更换伺服放大器或再生制动选件。
·再生制动晶体管故障。
→更换伺服放大器。
AL.25 绝对位置数据丢失电池连接线松动或电压偏低AL.30 再生报警检查再生能耗电路、减小负载AL.31 超速转速超出了瞬时允许转速。
<主要原因><处理方法>·指令输入脉冲频率过高。
→正确设定指令脉冲频率。
·加减速时间过小导致超调过大。
→增大加减速时间常数。
·伺服系统不稳定导致超调。
→重新设定增益。
不能重新设定增益的场合:①负载转动惯量比设定的小一些。
②重新检查加减速时间常数的设定。
·电子齿轮比太大。
(参数No.3、No.4) →正确设定。
·编码器故障。
→更换伺服电机。
参数No.3有*标记的参数,设定后需将电源断开,再重新接通电源,参数才会生效。
电子齿轮(指令脉冲倍率分子)电子齿轮设定错误可能导致错误运行,必须在伺服放大器停止输出的状态下进行设定。
为输入指令脉冲设定对应的倍率。
(注)设定范围是:1/50<CMX/CDV<500。
下式中伺服电机每转输入脉冲数的设定是可以改变。
(例)HC-KFE系列:10000 pulse/rev的场合如果设定值是0,可根据连接的伺服电机的分辨率自动的设定这个参数。
初始值:1设定范围:0、1~65535AL.32 过流伺服放大器的输出电流超过了允许电流。
<主要原因><处理方法>·伺服放大器输出侧U·V·W相存在短路。
→正确接线。
·伺服放大器输出侧U·V·W相接地。
→正确接线。
·由于外来噪声的干扰,过流检测电路出现错误。
→实施抗干扰处理。
·伺服放大器晶体管(IPM)故障。
→更换伺服放大器。
AL.33 过压直流母线电压的输入在400V以上。
<主要原因><处理方法>·内置的再生制动电阻或再生制动选件的接线断路或接触不良。
→更换电线。
→正确接线。
·再生制动晶体管故障。
→更换伺服放大器。
·内置再生制动电阻或再生制动选件的接线断路。
→使用内置再生制动电阻时,更换伺服放大器。
→使用再生制动选件时,更换再生制动选件。
·内置再生制动电阻或再生制动选件的容量不足。
→使用再生制动选件或更换容量大的再生制动选件。
·电源电压太高。
→检查电源系统AL.35 指令脉冲频率异常输入的指令脉冲的脉冲频率太高。
<主要原因><处理方法>·指令脉冲频率太高。
→改变指令脉冲频率使其达到合适的值。
·指令脉冲混入了噪声。
→实施抗干扰处理。
·指令装置故障。
→更换指令装置。
AL.37 参数异常参数设定值异常。
<主要原因><处理方法>·由于伺服放大器的故障使参数设定值发生改变。
→更换伺服放大器。
·没有连接参数No.0选择的再生制动选件。
→正确设定参数No.0 。
参数No.0有*标记的参数,设定后需将电源断开,再重新接通电源,参数才会生效。
*控制模式·再生制动选件选择:选择电机容量·电机系列·控制模式·再生制动选件。
□ □ □ □*1 *2 *3 *4*1选择电机容量0:100W1:200W2:400W3:500W4:750W5:1KW6:1.5KW7:2KW*2 选择再生制动选件0:不用1:备用(请不要设定)2:MR-RB0323:MR-RB124:MR-RB325:MR-RB306:MR-RB50*3选择电机系列0:KFE1:SFE*4 选择控制模式0:位置1:位置和速度2:速度初始值:0000(MR-E-10A), 1000(MR-E-20A), 2000(MR-E-40A),4000(MR-E-70A), 5010(MR-E-100A), 6010(MR-E-200A),设定范围:0000h~7912h主电路器件异常过热。
<主要原因><处理方法>·伺服放大器异常。
→更换伺服放大器。
·过载状态下反复通过“ON-OFF”来继续运行。
→检查运行方法。
·伺服放大器冷却风扇停止运行。
→修理伺服放大器的冷却风扇。
AL.42 反馈报警编码器信号丢失→更换伺服电机AL.45 主线路过热检查冷却系统、驱动方法检查、更换伺服放大器AL.46 伺服电机过热伺服电机温度上升热保护动作。
<主要原因><处理方法>·伺服电机环境温度超过40度。
→使伺服电机工作工作环境温度在0~40度之间。
·伺服电机过载。
→减小负载。
→检查运行模式。
→更换功率更大的伺服电机。
·编码器中的热保护器件故障。
伺服电机冷却风扇异常→更换伺服电机。
AL.50 过载1超过了伺服放大器的承载能力。
负载率300%:2.5s以上负载率200%:100s以上<主要原因><处理方法>·伺服放大器用于负载大于其连续输出能力的场合。
→减小负载。
→检查运行模式。
→更换功率更大的伺服电机。
·伺服系统不稳定,发生振动。
→进行几次加减速来完成自动增益调整。
→修改自动增益调整设定的响应速度。
→停止自动增益调整。
该用手动方式进行增益调整。
·机械故障。
→检查运行模式。
→安装限位开关。
·伺服电机接线错误。
伺服放大器的输出U·V·W和伺服电机的输入U·V·W相位没有接对。
→正确接线。
·编码器故障。
→更换伺服电机。
编码器故障: 使伺服马达停止输出,缓慢旋转伺服马达的轴,这时反馈的脉冲累积的数值应和转动的角度成比例关系,可判断编码器有故障。
AL.51 过载2 检查操作参数、正确连接、调整加减速时间、更换伺服放大器、更换伺服电机AL.52 误差过大偏差计数器中的滞留脉冲超出了编码器分辨率能力×10(pulse)。
<主要原因><处理方法>·加减速时间常数太小。
→增大加减速时间常数。
·转矩限制值(参数No.28)太小。
→增大转矩限制值。
·由于电源电压下降,致使转矩不足,伺服电机不能启动。
→检查电源的容量。
→更换功率更大的伺服电机。
·位置控制增益1(参数No.6)的值太小。
→将设定值调整到伺服系统能正确运行的范围。
·由于外力,伺服电机的轴发生旋转。
→达到转矩限制的场合,增大转矩限制值。
→减小负载。
→选择功率更大的伺服电机。
·机械冲突。
→检查运行模式。
→安装限位开关。
·编码器故障。
→更换伺服电机。
·伺服电机接线错误。
伺服放大器的输出U·V·W和伺服电机的输入U·V·W相位没有接对。
→正确接线。
参数No.28有*标记的参数,设定后需将电源断开,再重新接通电源,参数才会生效。
内部转矩限制1:设定最大转矩=100%。
用以限制伺服电机的最大输出转矩。
如果设定为0,那么不输出转矩。
初始值:100 %设定范围:0~100 %用于设定位置环1的增益。
如果增益变大,对位置指令的跟踪能力也增强。
自动调整时,这个参数将被自动设为自动调整的结果。
初始值:35 rad/s设定范围:4~2000 rad/sAL.73 辅助脉冲频率报警脉冲输入要达到600KPPSAL.74 选卡存储器异常→更换选卡板AL.75 选卡存储器异常2→更换选卡板AL.8A 串行通讯超时RS-232C或RS-422通讯中断的时间超过了参数No.56的设定值。
<主要原因><处理方法>·通讯电缆断路。
→修理或更换通讯电缆。
·通讯周期长于参数No.56 的设定值。