数控冲常见机床外部报警
- 格式:ppt
- 大小:4.04 MB
- 文档页数:39
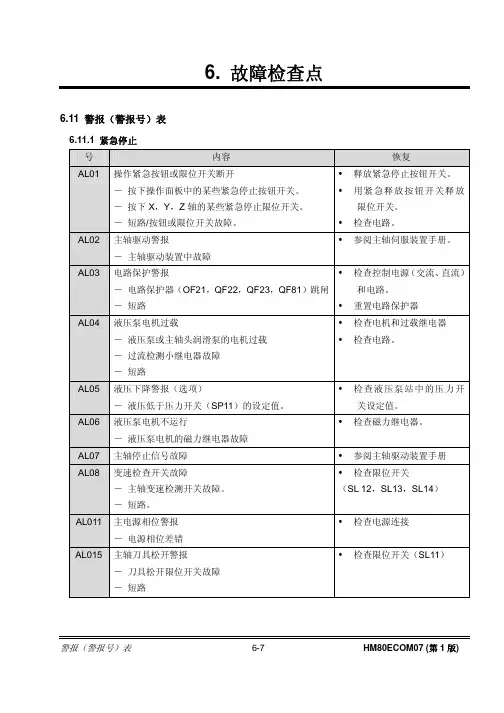
6.11 警报(警报号)表6.11.1 紧急停止号内容恢复AL01 操作紧急按钮或限位开关断开-按下操作面板中的某些紧急停止按钮开关。
-按下X,Y,Z轴的某些紧急停止限位开关。
-短路/按钮或限位开关故障。
释放紧急停止按钮开关。
用紧急释放按钮开关释放限位开关。
检查电路。
AL02 主轴驱动警报-主轴驱动装置中故障参阅主轴伺服装置手册。
AL03 电路保护警报-电路保护器(OF21,QF22,QF23,QF81)跳闸-短路 检查控制电源(交流、直流)和电路。
重置电路保护器AL04 液压泵电机过载-液压泵或主轴头润滑泵的电机过载-过流检测小继电器故障-短路 检查电机和过载继电器 检查电路。
AL05 液压下降警报(选项)-液压低于压力开关(SP11)的设定值。
检查液压泵站中的压力开关设定值。
AL06 液压泵电机不运行-液压泵电机的磁力继电器故障检查磁力继电器。
AL07 主轴停止信号故障 参阅主轴驱动装置手册AL08 变速检查开关故障-主轴变速检测开关故障。
-短路。
检查限位开关(SL 12,SL13,SL14)AL011 主电源相位警报-电源相位差错检查电源连接AL015 主轴刀具松开警报-刀具松开限位开关故障-短路检查限位开关(SL11)号内容恢复AL17 主轴头油溢流-主轴头内的润滑油油位高于设定值。
-油位开关故障。
检查排油泵和油位开关(SV11)。
AL19 机床型号选择保护继电器未设置-保护继电器设置不当。
检查机床的型号。
6.11.2 循环停止号内容恢复AL20 冷却液油和润滑油泵电机过载-润滑泵电机或冷却液泵电机过载。
-过流检测继电器故障。
-短路检查泵和继电器。
AL21 气压下降-气压低于压力开关(SP12)设定值。
检查供气管路。
检查压力开关(SP12)AL22 主轴定向超时-给出M19指令后主轴定向未在15秒内完成。
-主轴定向参数输入错误。
-位置编码器或反馈电缆故障。
检查相应参数的设定值。
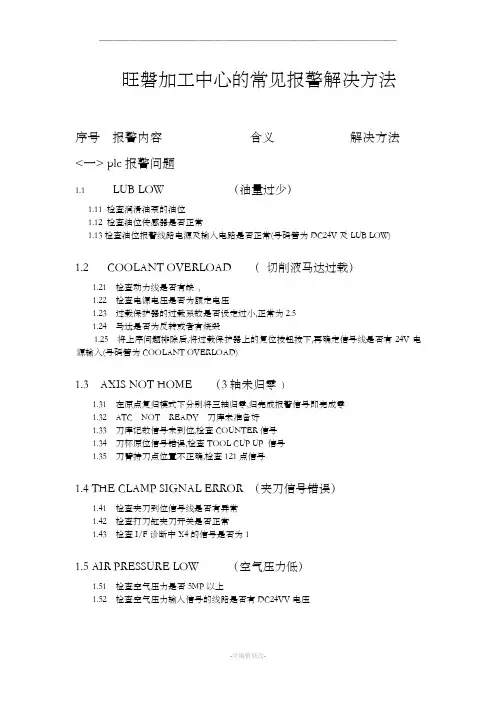
旺磐加工中心的常见报警解决方法序号报警内容含义解决方法<一> plc报警问题1.1 LUB LOW (油量过少)1.11 检查润滑油泵的油位1.12 检查油位传感器是否正常1.13检查油位报警线路电源及输入电路是否正常(号码管为DC24V及LUB LOW)1.2COOLANT OVERLOAD (切削液马达过载)1.21 检查动力线是否有缺,1.22 检查电源电压是否为额定电压1.23 过载保护器的过载系数是否设定过小,正常为2.51.24 马达是否为反转或者有烧毁1.25 将上序问题排除后,将过载保护器上的复位按钮按下,再确定信号线是否有24V电源输入(号码管为COOLANT OVERLOAD)1.3 AXIS NOT HOME (3轴未归零)1.31 在原点复归模式下分别将三轴归零,归完成报警信号即完成零1.32 ATC NOT READY 刀库未准备好1.33 刀库记数信号未到位,检查COUNTER信号1.34 刀杯原位信号错误,检查TOOL CUP UP 信号1.35 刀臂持刀点位置不正确,检查121点信号1.4 THE CLAMP SIGNAL ERROR (夹刀信号错误)1.41 检查夹刀到位信号线是否有异常1.42 检查打刀缸夹刀开关是否正常1.43 检查I/F诊断中X4的信号是否为11.5 AIR PRESSURE LOW (空气压力低)1.51 检查空气压力是否5MP以上1.52 检查空气压力输入信号的线路是否有DC24VV电压1.6 ATC COUNTER SINGAL ERROR (刀库记数信号错误)1.61 检查是否为记数信号接再刀库的144点上。
1.62 检查DC24电源144点与0V点之间电压是否为24V,1.63确定I/F诊断中的X1E点信号是否正常!1.7 THE SP-MOTOR OVERLOAD (主轴马达过载)1.71 主轴马达过载,检查回升电阻AL1与AL2间是否为通路1.72 检查PLC输入信号是否有24V1.8 PLC计时器不能工作参数被锁住1.81将6449BIT0位参数设定为01.9 PLC计数器不能工作参数被锁住1.91将6449BIT1位参数设定为01.10 PLC报警无法显示为用户定义形式参数锁住1.101将6550BIT0位和BIT2位设定为11.11 主轴无法转动(无信号显示)1.111 如果是使用面板启动主轴正转时,则检查是否是在手轮方式,然后检查打刀缸上面的紧刀信号是否到位(即I/F诊断中的点X4是否为1),如果此两点信号全部到位,主轴还是无法转动,则检查报警界面是否有伺服报警。
数控机床常见故障及检测方法分析数控机床具有智能化高,加工精度高、加工质量稳定、生产效率高等特点。
它综合了计算机技术、电气自动化技术等各个领域的多项科学技术成果。
特别适合于加工零件较复杂、精度要求高、产品更新频率高的场合。
它的任何部分出现故障,都可能导致加工精度降低,甚至机床停机、生产停顿,从而带来不必要的损失。
因此,了解机床常见故障并加强数控机床故障检测分析是十分必要的。
1、数控机床常见故障(1)主机故障数控机床的主机通常指组成数控机床的机械、润滑、冷却、排屑、液压、气动与防护等部分。
主机常见的故障主要有:1)因机械部件安装、调试、操作使用不当等原因引起的机械传动故障;2)因导轨、主轴等运动部件的干涉、摩擦过大等原因引起的故障;3)因机械零件的损坏、联结不良等原因引起的故障,等等;主机故障主要表现为传动噪声大、加工精度差、运行阻力大、机械部件动作不进行、机械部件损坏等等。
润滑不良、液压、气动系统的管路堵塞和密封不良,是主机发生故障的常见原因。
数控机床的定期维护、保养、控制和清除“三漏”现象发生是减少主机部分故障的重要措施。
(2)电气控制系统故障从所使用的元器件类型上,根据通常习惯,电气控制系统故障通常分为“弱电”故障和“强电”故障两大类。
“弱电”部分是指控制系统中以电子元器件、集成电路为主的控制部分。
数控机床的弱电部分包括CNC、PLC、MDI/C RT以及伺服驱动单元、输为输出单元等。
“弱电”故障又有硬件故障与软件故障之分,硬件故障是指上述各部分的集成电路芯片、分立电子元件、接插件以及外部连接组件等发生的故障。
软件故障是指在硬件正常情况下所出现的动作出锗、数据丢失等故障,常见的有.加工程序出错,系统程序和参数的改变或丢失,计算机运算出错等。
“强电”部分是指控制系统中的主回路或高压、大功率回路中的继电器、接触器、开关、熔断器、电源变压器、电动机、电磁铁、行程开关等电气元器件及其所组成的控制电路。
附录4:FANUC 0系统报警代码一览表(M系统)·后台编辑报警注意:采用后台编辑功能时,在MDI操作B中可能显示后台报警。
·串行脉冲编码器(SPC )报警注:串行脉冲编码器3n 9号报警的详细情况串行脉冲编码器3n 9号报警的详细情况在诊断地址(760~767号,770~777号)中显示: CSA :串行脉冲编码器出故障。
需更换。
BLA :电池电压太低,更换电池。
该报警与串行脉冲编码器报警无关。
PHA :串行脉冲编码器或反馈电缆出故障。
更换串行脉冲编码器或反馈电缆。
RCA :串行脉冲编码器出故障。
需更换。
BZA :串行脉冲编码器首次供电。
确保电池电缆连接良好。
将电源断开,再接通执行一次返回参考位置。
该报警与串行脉冲编码器报警无关。
CKA :串行脉冲编码器出故障。
需更换。
SPH :串行脉冲编码器或反馈电缆出故障。
需更换串行脉冲编码器或反馈电缆。
DTE :串行脉冲编码器发生通信错误。
脉冲编码器、反馈电缆或反馈接收电路出故障,更换脉冲编码器反馈电缆或NC 轴板。
CRC :串行脉冲编码器发生通信错误。
脉冲编码器、反馈电缆或反馈接收电路出故障,更换脉冲编码器反馈电缆或NC 轴板。
STB:串行脉冲编码器发生通信错误。
脉冲编码器、反馈电缆或反馈接收电路出故障。
#7 #6 #5 #4 #3 #2 #1 #0注意:如果在刚性攻螺纹中出现主轴误差过大的报警,则会显示攻螺纹进给轴误差过大的报警号。
·4n 4号伺服报警详情:4n 4号伺服报警的详细说明被显示在轴顺序的720~727号诊断号中OVL :产生了一个过载报警(该位引起400、402、406/490号伺服报警);LV : 在伺服放大器中产生了低电压报警。
检查LED ;OVC :在数字伺服内部产生了一个过电流报警;HCAL :在伺服放大器内产生了一个异常电流报警。
检查LED ;HVAL :在伺服放大器内产生了一个过电压报警。
检查LED ;DCAL :在伺服放大器中产生了再生放电电路报警。
旺磐加工中心的常见报警解决方法序号报警内容含义解决方法<一> plc报警问题1.1 LUB LOW (油量过少)1.11 检查润滑油泵的油位1.12 检查油位传感器是否正常1.13检查油位报警线路电源及输入电路是否正常(号码管为DC24V及LUB LOW)1.2COOLANT OVERLOAD (切削液马达过载)1.21 检查动力线是否有缺,1.22 检查电源电压是否为额定电压1.23 过载保护器的过载系数是否设定过小,正常为2.51.24 马达是否为反转或者有烧毁1.25 将上序问题排除后,将过载保护器上的复位按钮按下,再确定信号线是否有24V电源输入(号码管为COOLANT OVERLOAD)1.3 AXIS NOT HOME (3轴未归零)1.31 在原点复归模式下分别将三轴归零,归完成报警信号即完成零1.32 ATC NOT READY 刀库未准备好1.33 刀库记数信号未到位,检查COUNTER信号1.34 刀杯原位信号错误,检查TOOL CUP UP 信号1.35 刀臂持刀点位置不正确,检查121点信号1.4 THE CLAMP SIGNAL ERROR (夹刀信号错误)1.41 检查夹刀到位信号线是否有异常1.42 检查打刀缸夹刀开关是否正常1.43 检查I/F诊断中X4的信号是否为11.5 AIR PRESSURE LOW (空气压力低)1.51 检查空气压力是否5MP以上1.52 检查空气压力输入信号的线路是否有DC24VV电压1.6 ATC COUNTER SINGAL ERROR (刀库记数信号错误)1.61 检查是否为记数信号接再刀库的144点上。
1.62 检查DC24电源144点与0V点之间电压是否为24V,1.63确定I/F诊断中的X1E点信号是否正常!1.7 THE SP-MOTOR OVERLOAD (主轴马达过载)1.71 主轴马达过载,检查回升电阻AL1与AL2间是否为通路1.72 检查PLC输入信号是否有24V1.8 PLC计时器不能工作参数被锁住1.81将6449BIT0位参数设定为01.9 PLC计数器不能工作参数被锁住1.91将6449BIT1位参数设定为01.10 PLC报警无法显示为用户定义形式参数锁住1.101将6550BIT0位和BIT2位设定为11.11 主轴无法转动(无信号显示)1.111 如果是使用面板启动主轴正转时,则检查是否是在手轮方式,然后检查打刀缸上面的紧刀信号是否到位(即I/F诊断中的点X4是否为1),如果此两点信号全部到位,主轴还是无法转动,则检查报警界面是否有伺服报警。
数控机床常见故障诊断及排除方法不同的数控系统虽然在结构和性能上有所区别,但随着微电子技术的发展,在故障诊断上有它的共性。
1、数控机床故障诊断原则在故障诊断时应掌握以下原则:(1)先外部后内部数控机床是集机械、液压、电气和光学为一体的机床,故其故障的发生也会由这四者综合反映出来。
维修人员应先由外向内逐一进行排查。
尽量避免随意地启封、拆卸机床,否则会扩大故障,使机床大伤元气,丧失精度,降低性能。
(2)先机械后电气一般来说,机械故障较易发觉,而数控系统故障的诊断则难度较大些。
在故障检修之前,首先注意排除机械性的故障,往往可达到事半功倍的效果。
(3)先静后动先在机床断电的静止状态,通过了解、观察测试、分析确认为非破坏性故障后,方可给机床通电。
在运行工况下,进行动态的观察、检验和测试,查找故障。
而对破坏性故障,必须先排除危险后,方可通电。
(4)先简单后复杂当出现多种故障互相交织掩盖,一时无从下手时,应先解决容易的问题,后解决难度较大的问题。
往往简单问题解决后,难度大的问题也可能变得容易。
2、数控机床的故障诊断技术数控系统是高技术密集型产品,要想迅速而正确的查明原因并确定其故障的部位,要借助于诊断技术。
随着微处理器的不断发展。
诊断技术也由简单的诊断朝着多功能的高级诊断或智能化方向发展。
诊断能力的强弱也是评价CNC数控系统性能的一项重要指标。
目前所使用的各种CNC系统的诊断技术大致可分为以下几类:1. 启动诊断(Start Up Diagnostics)启动诊断是指CNC系统每次从通电开始,系统内部诊断程序就自动执行诊断。
诊断的内容为系统中最关键的硬件和系统控制软件,如CPU、存储器、I/O等单元模块,以及MDI/CRT单元、纸带阅读机、软盘单元等装置或外部设备。
只有当全部项目都确认正确无误之后,整个系统才能进入正常运行的准备状态。
否则,将在CRT画面或发光二极管用报警方式指示故障信息。
此时启动诊断过程不能结束,系统无法投入运行。
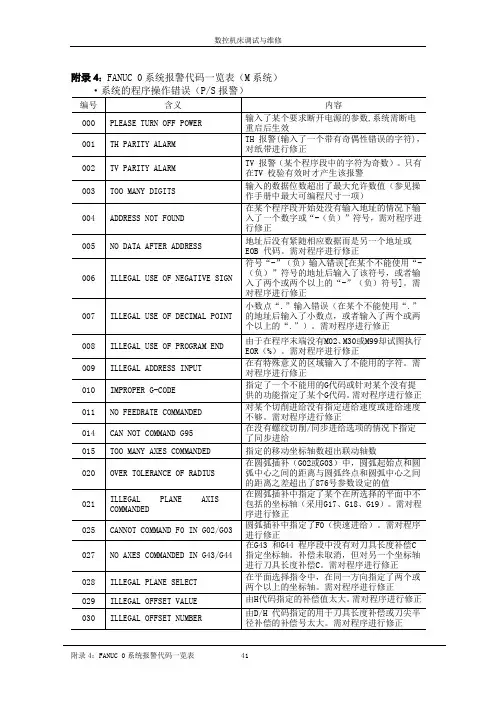
FANUC 0MD 系统报警说明1、程序报警(P/S 报警)报警号报警内容000 修改后须断电才能生效的参数,参数修改完毕后应该断电。
001 TH 报警,外设输入的程序格式错误。
002 TV 报警,外设输入的程序格式错误。
003 输入的数据超过了最大允许输入的值。
参考编程部分的有关内容。
004 程序段的第一个字符不就是地址,而就是一个数字或“-”。
005 一个地址后面跟着的不就是数字,而就是另外一个地址或程序段结束符。
006 符号“-”使用错误(“-”出现在一个不允许有负值的地址后面,或连续出现了两个“-”)。
007 小数点“、”使用错误。
009 一个字符出现在不能够使用该字符的位置。
010 指令了一个不能用的G 代码。
011 一个切削进给没有被给出进给率。
014 程序中出现了同步进给指令(本机床没有该功能)。
015 企图使四个轴同时运动。
020 圆弧插补中,起始点与终点到圆心的距离的差大于876 号参数指定的数值。
021 圆弧插补中,指令了不在圆弧插补平面内的轴的运动。
029 H 指定的偏置号中的刀具补偿值太大。
030 使用刀具长度补偿或半径补偿时,H 指定的刀具补偿号中的刀具补偿值太大。
033 编程了一个刀具半径补偿中不能出现的交点。
034 圆弧插补出现在刀具半径补偿的起始或取消的程序段。
037 企图在刀具半径补偿模态下使用G17、G18或G19 改变平面选择。
038 由于在刀具半径补偿模态下,圆弧的起点或终点与圆心重合,因此将产生过切削的情况。
041 刀具半径补偿时将产生过切削的情况。
043 指令了一个无效的T 代码。
044 固定循环模态下使用G27、G28或G30 指令。
046 G30 指令中P 地址被赋与了一个无效的值(对于本机床只能就是2)。
051 自动切角或自动圆角程序段后出现了不可能实现的运动。
052 自动切角或自动圆角程序段后的程序段不就是G01 指令。
053 自动切角或自动圆角程序段中,符号“,”后面的地址不就是C 或R。
数控系统“跟踪误差过大”报警现象及实例分析焦连岷【期刊名称】《金属加工:冷加工》【年(卷),期】2013(000)001【总页数】4页(P83-86)【作者】焦连岷【作者单位】华北机电学校山西长治046000【正文语种】中文数控系统的“跟踪误差过大”报警是最为常见和频繁的报警之一,由于此报警涉及数控机床的整个环路,涉及面广(机械、电气等),查找原因复杂,也成为数控维修人员最为头痛和棘手的报警之一。
笔者根据自己的维修经历,就此类报警现象做如下交流。
1.相关概念跟踪误差指的是数控机床在移动过程中的误差,即在移动过程中,理论移动量和实际移动量的差值(这里是和位移量“相当”的一个量值,大多数情况下是一个电量,因为此时经过了反馈环节),是动态的概念范畴,即E(S)=R(S)-B(S)。
这里,还要特别提及另外一个概念——定位误差。
定位误差指的是数控机床移动停止后产生的误差,即位移结束后,理论位移量和实际位移量的差值,是静态概念范畴,即E′(S)= C(S)理论-C(S)实际。
一般通用闭环控制系统结构如图1所示,其中R(S)为输入信号,C(S)为输出信号,E(S)为输入端定义的误差信号,G(S)为前向通道传递函数,H(S)为反馈通道传递函数,B(S)为反馈信号。
图1 通用闭环控制系统结构而对于全闭环数控机床,其控制系统框图如图2所示。
参照图1、图2并进行比对,我们不难发现数学模型中的各个环节在实际机床内包含的部件和机构。
图2 全闭环控制数控机床控制结构框图2.故障理论根源跟踪误差过大报警产生的原因是机床在运行过程中,实际坐标位置与反馈坐标位置不相符,且其值超过系统规定的允许值,此时,系统便会产生“跟踪误差过大”报警,即E(S)=R(S)-B(S)≥给定规定值。
图3为数控机床加工过程结构示意图,从系统的控制回路看,凡是和跟踪误差数学关系表达式相关的量都有可能成为造成此类报警的原因。
详细来说有以下几个环节:图3 数控机床加工过程结构示意图(1)控制器(数控系统)环节数控机床的控制器环节是用数控系统完成的,此环节包含了数控系统硬件本身和相关的软件控制。
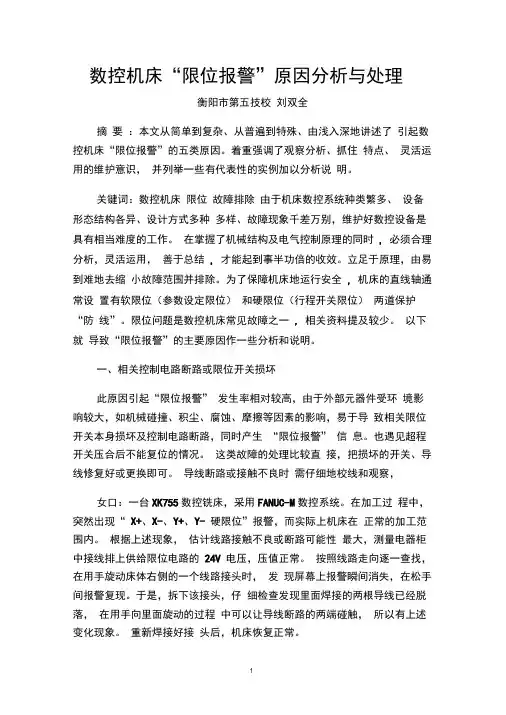
数控机床“限位报警”原因分析与处理衡阳市第五技校刘双全摘要:本文从简单到复杂、从普遍到特殊、由浅入深地讲述了引起数控机床“限位报警”的五类原因。
着重强调了观察分析、抓住特点、灵活运用的维护意识,并列举一些有代表性的实例加以分析说明。
关键词:数控机床限位故障排除由于机床数控系统种类繁多、设备形态结构各异、设计方式多种多样、故障现象千差万别,维护好数控设备是具有相当难度的工作。
在掌握了机械结构及电气控制原理的同时, 必须合理分析,灵活运用,善于总结, 才能起到事半功倍的收效。
立足于原理,由易到难地去缩小故障范围并排除。
为了保障机床地运行安全, 机床的直线轴通常设置有软限位(参数设定限位)和硬限位(行程开关限位)两道保护“防线”。
限位问题是数控机床常见故障之一, 相关资料提及较少。
以下就导致“限位报警”的主要原因作一些分析和说明。
一、相关控制电路断路或限位开关损坏此原因引起“限位报警” 发生率相对较高,由于外部元器件受环境影响较大,如机械碰撞、积尘、腐蚀、摩擦等因素的影响,易于导致相关限位开关本身损坏及控制电路断路,同时产生“限位报警” 信息。
也遇见超程开关压合后不能复位的情况。
这类故障的处理比较直接,把损坏的开关、导线修复好或更换即可。
导线断路或接触不良时需仔细地校线和观察,女口:一台XK755数控铣床,采用FANUC-M数控系统。
在加工过程中,突然出现“ X+、X-、Y+、Y- 硬限位”报警,而实际上机床在正常的加工范围内。
根据上述现象,估计线路接触不良或断路可能性最大,测量电器柜中接线排上供给限位电路的24V 电压,压值正常。
按照线路走向逐一查找,在用手旋动床体右侧的一个线路接头时,发现屏幕上报警瞬间消失,在松手间报警复现。
于是,拆下该接头,仔细检查发现里面焊接的两根导线已经脱落,在用手向里面旋动的过程中可以让导线断路的两端碰触,所以有上述变化现象。
重新焊接好接头后,机床恢复正常。
二、操作不规范,误动作或机床失控其中,主要以引起硬限位报警为主,一般来说,通过直接补救措施方能进行恢复,利用机床本身的超程解除功能或短接法是日常维护的惯用方法。
FANUC数控系统报警代码表,再也不怕机床报警了FANUC-- 0 系统操作编程说明书1附录 1:FANUC-0 系统报警代码表1. 程序报警(P/S 报警)报警号报警内容000 修改后须断电才能生效的参数,参数修改完毕后应该断电。
001 TH 报警,外设输入的程序格式错误。
002 TV 报警,外设输入的程序格式错误。
003 输入的数据超过了最大允许输入的值。
参考编程部分的有关内容。
004 程序段的第一个字符不是地址,而是一个数字或“-”。
005 一个地址后面跟着的不是数字,而是另外一个地址或程序段结束符。
006 符号“-”使用错误(“-”出现在一个不允许有负值的地址后面,或连续出现了两个“-”)。
007 小数点“. ”使用错误。
009 一个字符出现在不能够使用该字符的位置。
010 指令了一个不能用的G 代码。
011 一个切削进给没有被给出进给率。
014 程序中出现了同步进给指令(本机床没有该功能)。
015 企图使四个轴同时运动。
020 圆弧插补中,起始点和终点到圆心的距离的差大于876 号参数指定的数值。
021 圆弧插补中,指令了不在圆弧插补平面内的轴的运动。
029 H 指定的偏置号中的刀具补偿值太大。
030 使用刀具长度补偿或半径补偿时,H 指定的刀具补偿号中的刀具补偿值太大。
033 编程了一个刀具半径补偿中不能出现的交点。
034 圆弧插补出现在刀具半径补偿的起始或取消的程序段。
037 企图在刀具半径补偿模态下使用G17、G18 或G19 改变平面选择。
038 由于在刀具半径补偿模态下,圆弧的起点或终点和圆心重合,因此将产生过切削的情况。
041 刀具半径补偿时将产生过切削的情况。
043 指令了一个无效的T 代码。
044 固定循环模态下使用G27、G28 或G30 指令。
046 G30 指令中P 地址被赋与了一个无效的值(对于本机床只能是2)。
051 自动切角或自动圆角程序段后出现了不可能实现的运动。
发那科数控机床系统报警故障处理方法FANUC系统有很丰富的机床参数,为数控机床的安装调试及日常维护带来了方便条件。
电工之家根据多年的实践对常用的机床参数在维修中的做了些归纳1.手摇脉冲发生器损坏。
一台FANUC0TD数控车床,手摇脉冲发生器出现故障,使对刀不能进行微调,需要更换或修理故障件。
当时没有合适的备件,可以先将参数900#3置0,暂时将手摇脉冲发生器不用,改为用点动按钮单脉冲发生器操作来进行刀具微调工作。
等手摇脉冲发生器修好后再将该参数置1。
2.当机床开机后返回参考点时出现超行程报警。
上述机床在返回参考点过程中,出现510或511超程报警,处理方法有两种:(1)若X轴在返回参考点过程中,出现510或是511超程报警,可将参数0700LT1X1数值改为+99999999(或将0704LT1X2数值修改为-99999999)后,再一次返回参考点。
若没有问题,则将参数0700或0704数值改为原来数值。
(2)同时按P和CAN键后开机,即可消除超程报警。
3.一台FANUC0i数控车床,开机后不久出现ALM701报警。
从维修说明书解释内容为控制部上部的风扇过热,打开机床电气柜,检查风扇电机不动作,检查风扇电源正常,可判定风扇损坏,因一时购买不到同类型风扇,即先将参数RRM8901#0改为1先释放ALM701报警,然后在强制冷风冷却,待风扇购到后,再将PRM8901改为0。
4.一台FANUC0M数控系统加工中心,主轴在换刀过程中,当主轴与换刀臂接触的一瞬间,发生接触碰撞异响故障。
分析故障原因是因为主轴定位不准,造成主轴头与换刀臂吻合不好,无疑会引起机械撞击声,两处均有明显的撞伤痕迹。
经查,换刀臂与主轴头均无机械松动,且换刀臂定位动作准确,故采用修改N6577参数值解决,即将原数据1525改为1524后,故障排除。
5.密级型参数0900~0939维修法。
按FANUC0MC操作说明书的方法进行参数传输时,密级型参数0900~0939必须用MDI方式输入很不方便。
VT-300数控转塔冲床(FANUC0I-PC)电气培训系统的工作方式要紧有手动〔JOG〕,回参〔REF〕,半自动〔MDI〕,编辑〔EDIT〕,自动〔AUTO〕手动-指令各个轴的运行、销进、销出等。
回参-各个轴开机后回参考点半自动-能够执行单个程序段或其它一些功能,如手冲等。
编辑-能够修正,插进,删除,传输程序自动-执行程序冲压工件。
1.开机顺序.(1).合上总电源,使机床母线有电.(2).按操作面板上的POWERON(电源开),等待数秒显示器显示,出现以下报警:1000参考点未回(3).按油泵电机启动按钮,启动电机,且指示灯亮.(4)选择JOG(手动)方式.(5)按下手动轴运动按钮–X,–Y,使X,Y轴均离开原点200MM以上.(6).把方式选到REF(回参)方式.(7).按下手动轴运动按钮+X,+Y,+T,使X,Y,T轴回参考点,指示灯亮,回参完成.(8).按下手动轴运动按钮+C,使C轴回参考点,指示灯亮,回参完成.(9).用足踩下足踏开关,合上夹钳.(10).在REF(回参)方式下,按夹钳检测键,检测夹钳.注重:回参的时候只需要按一下方向键即可,机床会连续执行回参动作,在轴到达参考点前,不可按RESET(复位)来停止.机床检测夹钳时,X轴必须在参考点的坐标位置上,且检测的中途不可按RESET(复位)来停止,机床每次开机的时候都需要检测夹钳.每次移动后也要检测夹钳,还有紧急停止后也需要检测夹钳.切记2.程序的构造及执行一个程序的顺序.一个完整的程序如下格式:O____;程序名,用户使用程序0---9000G06A__;输进板厚以确定液压冲头位置G81X__Y__;建立坐标系并依据板长和板宽确定预压点位置G90----------;程序内容M45;冲头抬起到上死点T2;最后转到2号工位G28;返回参考点M30;程序结束执行一个程序的顺序.机床无任何报警编辑方式EDIT输进字母O和相应的数字,然后按O搜索调出程序方式选到"AUTO"上好板材,再启动。
FANUC系统的疑难故障分析及排除
作者:李汉宝
(一)0 系统故障
(二)16系统类故障
(三)10/11/12/15 系统故障
FANUC10/11/12系统在一般情况下出现报警时,显示器屏幕上会显示报警号和报警内容。
但当显示器屏幕没有显示时,可根据主板的LED显示内容来判断故障所在。
对于FANUC 15A与FANUC 15B相比较而言,在硬件结构设计上,相差很大。
在FANUC 15B 的印刷板的制造中,元器件采用大规模集成电路。
系统的整体结构采用槽式,在每一个槽中分别插上电源、PMC控制板、Main 板、OPT1 板、RISC板等。
而对于15A/E 而言,一般由底板、电源、轴控制板、BASE0、BASE1、BASE2、REMOTE BUFFER板、分离型位置检测板等。
不论是15A/E 或15B ,当系统出现故障时,每一个板上都有报警灯和故障灯显示,因为有故障,系统的显示器不能显示,此时只有根据系统的报警灯和故障灯显示情况来判断故障位置并加以排除,状态灯为绿色,报警灯为红色。
对于15A/E 而言,其报警灯和故障灯的排列方式如下:
对于FANUC 15B ,其报警灯和状态灯的排列方式是:
上边一排是状态显示灯,绿色;下面一排为报警灯,红色。
以下45--57项是关于15A/E 的常见故障的说明。
(四)Power Mate系列故障
Power Mate系列有A、B、C、D、E、F,以下是它们的一些区别:。
FANUC 0MD 系统报警说明1. 程序报警(P/S 报警)报警号报警内容000 修改后须断电才能生效的参数,参数修改完毕后应该断电。
001 TH 报警,外设输入的程序格式错误。
002 TV 报警,外设输入的程序格式错误。
003 输入的数据超过了最大允许输入的值。
参考编程部分的有关内容。
004 程序段的第一个字符不是地址,而是一个数字或“-”。
005 一个地址后面跟着的不是数字,而是另外一个地址或程序段结束符。
006 符号“-”使用错误(“-”出现在一个不允许有负值的地址后面,或连续出现了两个“-”)。
007 小数点“. ”使用错误。
009 一个字符出现在不能够使用该字符的位置。
010 指令了一个不能用的G 代码。
011 一个切削进给没有被给出进给率。
014 程序中出现了同步进给指令(本机床没有该功能)。
015 企图使四个轴同时运动。
020 圆弧插补中,起始点和终点到圆心的距离的差大于876 号参数指定的数值。
021 圆弧插补中,指令了不在圆弧插补平面内的轴的运动。
029 H 指定的偏置号中的刀具补偿值太大。
030 使用刀具长度补偿或半径补偿时,H 指定的刀具补偿号中的刀具补偿值太大。
033 编程了一个刀具半径补偿中不能出现的交点。
034 圆弧插补出现在刀具半径补偿的起始或取消的程序段。
037 企图在刀具半径补偿模态下使用G17、G18或G19 改变平面选择。
038 由于在刀具半径补偿模态下,圆弧的起点或终点和圆心重合,因此将产生过切削的情况。
041 刀具半径补偿时将产生过切削的情况。
043 指令了一个无效的T 代码。
044 固定循环模态下使用G27、G28或G30 指令。
046 G30 指令中P 地址被赋与了一个无效的值(对于本机床只能是2)。
051 自动切角或自动圆角程序段后出现了不可能实现的运动。
052 自动切角或自动圆角程序段后的程序段不是G01 指令。
053 自动切角或自动圆角程序段中,符号“,”后面的地址不是C 或R。