理论力学第十五章习题
- 格式:doc
- 大小:122.50 KB
- 文档页数:6
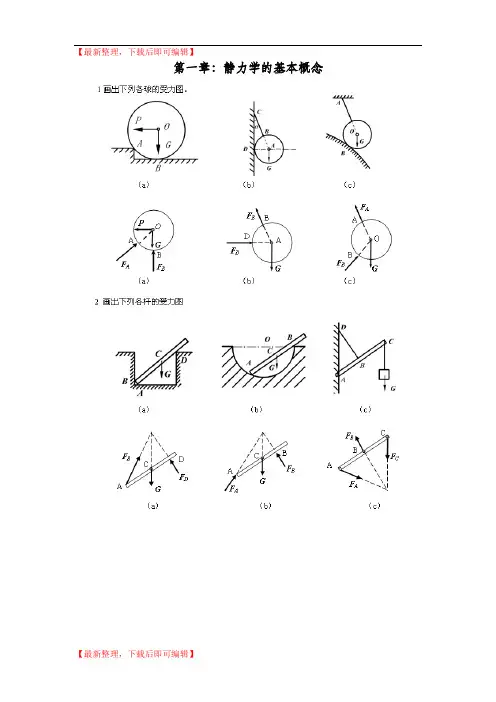
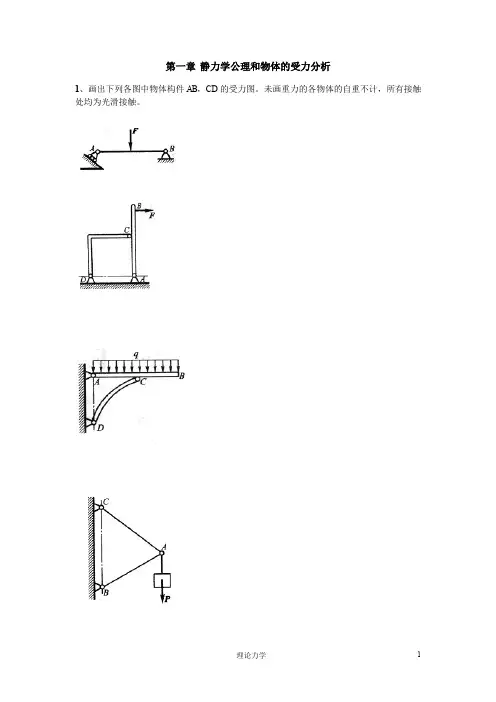
第一章静力学公理和物体的受力分析1、画出下列各图中物体构件AB,CD的受力图。
未画重力的各物体的自重不计,所有接触处均为光滑接触。
2、画出下列每个标注字符的物体的受力图与系统整体受力图。
题图中未画重力的各物体的自重不计,所有接触处均为光滑接触。
第二章 平面汇交力系与平面力偶系1、物体重P =20kN ,用绳子挂在支架的滑轮B 上,绳子的另一端接在铰车D 上,如图所示。
转动铰车,物体便能升起。
设滑轮的大小、AB 与CB 杆自重及摩擦略去不计,A 、B 、C 三处均为铰链连接。
当物体处于平衡状态时,试求拉杆AB 和支杆CB 所受的力。
2、铰链四杆机构CABD 的CD 边固定,在铰链A 、B 处有力1F 、2F 作用,如图所示。
该机构在图示位置平衡,杆重略去不计。
求力F 1与F 2的关系。
3、在图示结构中,各构件的自重略去不计。
在构件AB上作用一力偶矩为M的力偶,求支座A和C的约束反力。
4、在图示机构中,曲柄OA上作用一力偶,其矩为M;另在滑块D上作用水平力F。
机构尺寸如图所示,各杆重量不计。
求当机构平衡时,力F与力偶矩M的关系。
第三章 平面任意力系1、已知N 1501=F ,N 2002=F ,N 3003=F ,N 200'==F F 。
求力系向点O 的简化结果,并求力系合力的大小及其与原点O 的距离d 。
2、一水平简支梁结构,约束和载荷如图所示,求支座A 和B 的约束反力。
3、水平梁AB 由铰链A 和杆BC 支持,如图所示。
在梁的D 处用销子安装半径为r =0.1m 的滑轮。
有一跨过滑轮的绳子,其一端水平地系在墙上,另一端悬挂有重为P =1800N 的重物。
如AD =0.2m ,BD =0.4m ,ϕ=45°,且不计梁、滑轮和绳子的自重。
求固定铰支座A 和杆BC 的约束力。
4、由AC 和CD 构成的组合梁通过铰链C 连接。
它的支承和受力如图所示。
已知均布载荷强度kN/m 10=q ,力偶矩m kN 40⋅=M ,不计梁重。
《理论力学》思考题及习题宁夏大学机械工程学院技术基础部使用教材:理论力学(Ⅰ).哈尔滨工业大学理论力学教研室,第六版.北京:高等教育出版社.说明:以下各章的思考题及习题的页码和题号均以“哈工大”第六版《理论力学》教材为准。
静力学第一章静力学公理和物体的受力分析思考题:1.合矢与合力概念相同吗?2.几何法求合矢时,分矢与合矢怎样区别?3.力沿任意两个轴分解时的两个分力与力向该二轴的投影大小是否相同?4.二力平衡与作用力、反作用力的概念有什么不同?5.二力杆或二力构件的受力特点是什么?6.不计重力但作用有力偶的杆是二力杆吗?7.三力平衡汇交时怎样确定第三个力的作用线方向?8.画受力图的一般步骤是什么?在画物系中各个分离体的受力图时需要注意什么?9.P18思考题。
习题:P20-21:1-1 (a) (c) (d) (e) (g) (i) (j) (k); 1-2 (a) (d) (f)(i)(m) (o) 第二章平面汇交力系与平面力偶系思考题:1.汇交力系的几何法与解析法在应用上各有什么特点?2.解平衡问题时的一般步骤与注意事项?3.解物系问题时的注意事项?4.P33思考题。
5.力偶的特点与等效条件是什么?6.解力偶系平衡问题时的一般步骤与注意事项?习题:P36-40:2-1;2-3; 2-9; 2--12 (a) (c);2—14;2—17第三章平面任意力系思考题:1.力线平移定理的含义?2.用二矩式、三矩式求解问题时,附加什么条件才能保证物系平衡?3.求解平衡问题时,有哪些技巧可以使计算方便?4.P61思考题。
5.物系问题的解题思路?怎样选取研究对象?怎样列方程?6.销钉既受力又连接两个以上物体时的受力分析需掌握什么原则?7.怎样能做到一个方程求解一个未知数?8.节点法的本质是什么?9.截面法的本质是什么?10.怎样判断零杆?习题:P63-71:3-1;3-4;3-6;3-12(a);3-13;3-22;3-34第四章空间力系思考题:1.空间力系化简结果与平面力系化简结果的关系?2.什么力系有六个平衡方程?什么力系有三个平衡方程?什么力系有两个平衡方程?什么力系只有一个平衡方程?3.计算重心的常用方法。
第一章静力学基础一、是非题1.力有两种作用效果,即力可以使物体的运动状态发生变化,也可以使物体发生变形。
()2.在理论力学中只研究力的外效应。
()3.两端用光滑铰链连接的构件是二力构件。
()4.作用在一个刚体上的任意两个力成平衡的必要与充分条件是:两个力的作用线相同,大小相等,方向相反。
()5.作用于刚体的力可沿其作用线移动而不改变其对刚体的运动效应。
()6.三力平衡定理指出:三力汇交于一点,则这三个力必然互相平衡。
()7.平面汇交力系平衡时,力多边形各力应首尾相接,但在作图时力的顺序可以不同。
()8.约束力的方向总是与约束所能阻止的被约束物体的运动方向一致的。
()二、选择题1.若作用在A点的两个大小不等的力F1和F2,沿同一直线但方向相反。
则其合力可以表示为。
①F1-F2;②F2-F1;③F1+F2;2.作用在一个刚体上的两个力F A、F B,满足F A=-F B的条件,则该二力可能是。
①作用力和反作用力或一对平衡的力;②一对平衡的力或一个力偶。
③一对平衡的力或一个力和一个力偶;④作用力和反作用力或一个力偶。
3.三力平衡定理是。
①共面不平行的三个力互相平衡必汇交于一点;②共面三力若平衡,必汇交于一点;③三力汇交于一点,则这三个力必互相平衡。
4.已知F1、F2、F3、F4为作用于刚体上的平面共点力系,其力矢关系如图所示为平行四边形,由此。
①力系可合成为一个力偶;②力系可合成为一个力;③力系简化为一个力和一个力偶;④力系的合力为零,力系平衡。
5.在下述原理、法则、定理中,只适用于刚体的有。
①二力平衡原理;②力的平行四边形法则;③加减平衡力系原理;④力的可传性原理;⑤作用与反作用定理。
三、填空题1.二力平衡和作用反作用定律中的两个力,都是等值、反向、共线的,所不同的是。
2.已知力F沿直线AB作用,其中一个分力的作用与AB成30°角,若欲使另一个分力的大小在所有分力中为最小,则此二分力间的夹角为度。
![理论力学---第十五章 单自由度系的振动 [同济大学]](https://uimg.taocdn.com/f12734254b73f242336c5f62.webp)
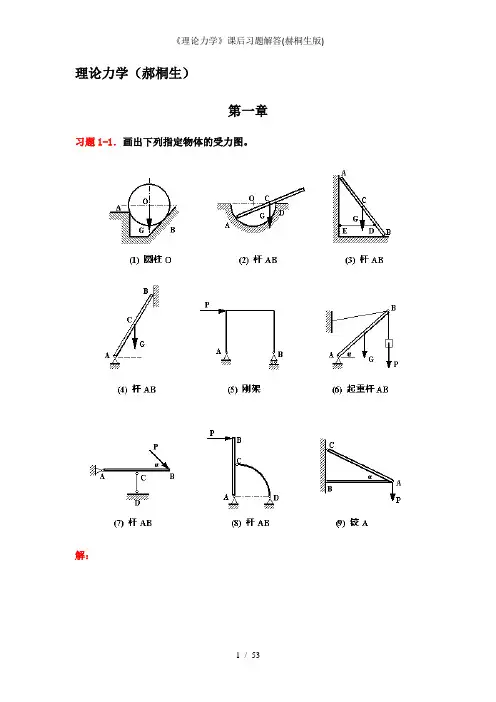
理论力学(郝桐生)第一章习题1-1.画出下列指定物体的受力图。
解:习题1-2.画出下列各物系中指定物体的受力图。
解:习题1-3.画出下列各物系中指定物体的受力图。
解:第二章习题2-1.铆接薄钢板在孔心A、B和C处受三力作用如图,已知P1=100N沿铅垂方向,P2=50N沿AB方向,P3=50N沿水平方向;求该力系的合成结果。
解:属平面汇交力系;合力大小和方向:习题2-2.图示简支梁受集中荷载P=20kN,求图示两种情况下支座A、B的约束反力。
解:(1)研究AB,受力分析:画力三角形:相似关系:几何关系:约束反力:(2) 研究AB,受力分析:画力三角形:相似关系:几何关系:约束反力:习题2-3.电机重P=5kN放在水平梁AB的中央,梁的A端以铰链固定,B端以撑杆BC支持。
求撑杆BC所受的力。
解:(1)研究整体,受力分析:(2) 画力三角形:(3) 求BC受力习题2-4.简易起重机用钢丝绳吊起重量G=2kN的重物,不计杆件自重、磨擦及滑轮大小,A、B、C三处简化为铰链连接;求杆AB和AC所受的力。
解:(1) 研究铰A,受力分析(AC、AB是二力杆,不计滑轮大小):建立直角坐标Axy,列平衡方程:解平衡方程:AB杆受拉,BC杆受压。
(2) 研究铰A,受力分析(AC、AB是二力杆,不计滑轮大小):建立直角坐标Axy,列平衡方程:解平衡方程:AB杆实际受力方向与假设相反,为受压;BC杆受压。
习题2-5.三铰门式刚架受集中荷载P作用,不计架重;求图示两种情况下支座A、B的约束反力。
解:(1) 研究整体,受力分析(AC是二力杆);画力三角形:求约束反力:(2) 研究整体,受力分析(BC是二力杆);画力三角形:几何关系:求约束反力:习题2-6.四根绳索AC、CB、CE、ED连接如图,其中B、D两端固定在支架上,A端系在重物上,人在E点向下施力P,若P=400N,α=4o,求所能吊起的重量G。
解:(1) 研究铰E,受力分析,画力三角形:由图知:(2) 研究铰C,受力分析,画力三角形:由图知:习题2-7.夹具中所用的两种连杆增力机构如图所示,书籍推力P作用于A点,夹紧平衡时杆AB与水平线的夹角为;求对于工件的夹紧力Q和当α=10o时的增力倍数Q/P。
第十五章 分析力学基础
答 案
15-1
图a自由度数为1;图b自由度数为2。
15-2
广义力不都具有力的量纲,可以是力,也可以是力矩,还可以是其他量。
广义力与广义坐标的虚增量之积等于虚功。
15-3
分别对图示系统写出其势能表达式,求一阶与二阶导数,由稳定性判别依据可得图a所示系统为不稳定平衡状态,图b所示系统为稳定平衡状态。
15-4
只要内力作功就应该计入内力所作的功。
15-5
将摩擦力看作为“主动力”,即可应用动力学普遍方程或拉格朗日方程。
15-6
刚体平面运动有3个自由度,选质心坐标和转角为广义坐标,写出系统的动能,刚体所受力系向质心简化,此即为3个广义力,代入拉格朗日方程运算
即可。
15-7
在证明拉格朗日两个恒等式时,在推导以广义坐标表示的动力学普遍方程时。
理论力学知到章节测试答案智慧树2023年最新苏州大学绪论单元测试1.下列说法中,哪些是正确的?()。
参考答案:理论力学是研究物体机械运动一般规律的科学。
它研究的内容属于经典力学的范畴。
;运动学只从几何的角度来研究物体的运动,而不研究引起物体运动的物理原因。
;动力学研究受力物体的运动与作用力之间的关系。
;静力学主要研究受力物体平衡时作用力所应满足的条件;同时也研究物体受力的分析方法,以及力系简化的方法等。
第一章测试1.图示各杆自重不计,以下四种情况中,哪一种情况的BD杆不是二力构件?()。
参考答案:2.图示无重直角刚杆ACB,B端为固定铰支座,A端靠在一光滑半圆面上,以下四图中哪一个是ACB杆的正确受力图?()。
参考答案:3.下列说法中,哪些是正确的?()。
参考答案:若要将作用力沿其作用线移动到其它点而不改变它的作用,则其移动范围必须在同一刚体内。
;力的平行四边形法则中的两个分力和它们的合力的作用范围必须在同一个物体的同一点上。
;作用与反作用定律对任何宏观物体和物体系统都适用。
4.受二力作用而平衡的物体上所受的两个力一定是等值、反向、共线的。
()参考答案:对5.若作用在刚体上的三个力的作用线汇交于同一个点,则该刚体必处于平衡状态。
()参考答案:错第二章测试1.构件尺寸如图(单位m),不计各杆件自重,载荷F=60kN。
则杆BD的内力为()。
参考答案:100kN,压2.图示桁架受到大小均为F 的三个力作用,则杆1、2、3的内力大小依次为()。
参考答案:0,F ,03.图示四个力F1、F2、F3、F4,下列它们在y轴上投影的计算式中,哪些是正确的?()参考答案:;4.力偶可以在其作用面内任意旋转和平移而不改变其对物体的作用效果。
()参考答案:对5.若某物体受一平面力系作用而平衡,则可根据此力系的平衡条件列出三个平衡方程,从而可以求解出三个未知量。
()参考答案:错第三章测试1.一棱长为a的正方体定角上,作用有六个大小均等于F的力F i,它们的方向如图,该力系简化的结果是()。
2014级理论力学期末考试试题题库理论力学试题第一章物系受力分析画图题1、2、3、4、5、第二章平面汇交力系计算题1、2、3、4、5、6、7、第三章平面任意力系计算题1、2、4、5、6、7、8、第四章空间力系计算题1、2、3、4、5、6、第五章静力学综合填空题1、作用在刚体上某点的力,可以沿着其作用线移动到刚体上任意一点,并不改变它对刚体的作用效果。
2、光滑面约束反力方向沿接触面公法线指向被约束物体。
3、光滑铰链、中间铰链有1个方向无法确定的约束反力,通常简化为方向确定的 2 个反力。
4、只受两个力作用而处于平衡的刚体,叫二力构件,反力方向沿二力作用点连线。
5、约束力的方向与该约束所能阻碍的位移方向相反 .6、柔软绳索约束反力方向沿绳索 ,指向背离被约束物体.7、在平面内只要保持力偶矩和转动方向不变,可以同时改变力偶中力的大小和力臂的长短,则力偶对刚体的作用效果不变。
8、力偶的两个力在任一坐标轴上投影的代数和等于零,它对平面内的任一点的矩等于力偶矩,力偶矩与矩心的位置无关。
9、同一平面内的两个力偶,只要力偶矩相等,则两力偶彼此等效.10、平面汇交力系可简化为一合力 ,其大小和方向等于各个力的矢量和,作用线通过汇交点.11、平面汇交力系是指力作用线在同一平面内 ,且汇交与一点的力系.12、空间平行力系共有 3 个独立的平衡方程.13、空间力偶对刚体的作用效果决定于力偶矩大小、力偶作用面方位、力偶的转向三个因素。
14、空间任意力系有 6 个独立的平衡方程.15、空间汇交力系的合力等于各分力的矢量和,合力的作用线通过汇交点 .第五章静力学综合摩擦填空题1、当作用在物体上的全部主动力的合力作用线与接触面法线间的夹角小于摩擦角时,不论该合力大小如何,物体总是处于平衡状态,这种现象称为自锁现象.2、答案:50N3、答案:φm/24、静摩擦力Fs的方向与接触面间相对滑动趋势的方向相反,其值满足__0<=F S<=F MAX摩擦现象分为滑动摩擦和__滚动摩阻__两类。
理论力学习题册答案班级姓名学号第一章静力学公理与受力分析(1)一.是非题1、加减平衡力系公理不但适用于刚体,还适用于变形体。
()2、作用于刚体上三个力的作用线汇交于一点,该刚体必处于平衡状态。
()3、刚体是真实物体的一种抽象化的力学模型,在自然界中并不存在。
()4、凡是受两个力作用的刚体都是二力构件。
()5、力是滑移矢量,力沿其作用线滑移不会改变对物体的作用效果。
()二.选择题1、在下述公理、法则、原理中,只适于刚体的有()①二力平衡公理②力的平行四边形法则③加减平衡力系公理④力的可传性原理⑤作用与反作用公理三.画出下列图中指定物体受力图。
未画重力的物体不计自重,所有接触处均为光滑接触。
多杆件的整体受力图可在原图上画。
(a)球A(b)杆AB- 1 -(c)杆AB、CD、整体(d)杆AB、CD、整体(e)杆AC、CB、整体(f)杆AC、CD、整体四.画出下列图中指定物体受力图。
未画重力的物体不计自重,所有接触处均为光滑接触。
多杆件的整体受力图可在原图上画。
(a)球A、球B、整体(b)杆BC、杆AC、整体- 2 -班级姓名学号第一章静力学公理与受力分析(2)一.画出下列图中指定物体受力图。
未画重力的物体不计自重,所有接触处均为光滑接触。
多杆件的整体受力图可在原图上画。
(a)杆AB、BC、整体(c)杆AB、CD、整体CAFAxDBFAyFBWEW(b)杆ABOriginal Figure、BC、轮E、整体FBD of the entire frame(d)杆BC带铰、杆AC、整体- 3 -(e)杆CE、AH、整体(g)杆AB带轮及较A、整体(f)杆AD、杆DB、整体(h)杆AB、AC、AD、整体- 4 -班级姓名学号第二章平面汇交和力偶系一.是非题1、因为构成力偶的两个力满足F= - F’,所以力偶的合力等于零。
()2、用解析法求平面汇交力系的合力时,若选用不同的直角坐标系,则所求得的合力不同。
()3、力偶矩就是力偶。
各章习题(计算题)部分答案第1章 略 第2章2-1 R 3284kN F .=,R cos()2063,.=︒F i ,R cos()1163,.=︒F j 2-2 3162kN T .=,30β=︒ 2-3 482.α=︒,R 496kN x F .= 2-4 11866N 50N x y F .F ==,2230N 40N x y F F ==-, 330N 60N x y F F ==, 44566N 566N x y F .F .==, 2-5 R 0F =2-6(a) 707kN 354kN 354kN Ax Ay B F .F .F .===,,(b) 05kN 5kN Ax Ay B F F F ===,,(c) 933kN 433kN 612kN Ax Ay B F .F .F .===,,(垂直于支撑面,指向简支梁) 2-7 min 15kN F =,N 25kN F =2-8 0866kN 05kN 1kN Ax Ay BD F .F .T ===,, 2-9 N N 1732kN 3464kN 15m A C F .F .AC .===,, 2-10 03436kN AB AC F F .==,2-11 BC F =,Ax F =,Ay F G = 2-12 N 65EF G F =+2-13 N N C D F F =2-14 231N 1155N 231N 845N AB AE BC BD F F .F F .====,,,2-15 (a) 33PF P F B Ay =-=,(b) P F F B A 32== (A F ,B F 方向相反,组成一力偶) (c) 0==B A F F2-16 1F,AB F,OA F =,7kN BC F =- 2-17 1905N 1905N 1905N 1905N Ax Ay Cx Cy F F F F =-===-,,, 2-18 3571N 3571N 3571N 3571N Ax Ay Cx Cy F F F F ==-=-=,,,·312··312·2-19 24kN m M =⋅,1155kN A B F F .== 第3章3-1 2400N Ax F =,1200N Ay F =,8485N BC F .= 3-2 R 0F'=,260N m O M =⋅ 3-3 (a) R F'qa =,221qa M O = (b) R12F'ql =,21ql q M O = 3-4(a) Ax F =,40kN Ay F =,120kN m A M =⋅,N C F = (b) 0=AxF ,25kN Ay F .=-,15kN By F =,D 25kN y F .=3-5 当60α=︒时,min 4AB PrF L= 3-6 0=Ax F ,qa F Ay2=,2qa M A =3-7 (a)2400N Ax F =,1000N Ay F =-,2400N Dx F =-,2000N Dy F = (b)2400N Ax F =-,1000N Ay F =-,2400N Dx F =,2000N Dy F =3-8 Ax F =,Ay F =,Bx F =,By F =3-9 rPLF Ax 2-=,P F Ay =,r PL F Bx 2=,P F By =,r PL F D 2=,P F C 2=3-10 R 32E F qa =-,qa F BD 22= 3-11 23kN Ax Cx F F .=-=-,1kN Ay Cy F F == 3-12 3PF AC -=,0=EF F ,32P F BD -= 3-13 2F F BC=,2F F DE = 第4章4-1 T 20kN F =,104kN OA F .=-,139kN OB F .=- 4-2 254kN m x M .=⋅,146kN m y M .=⋅,0=z M 4-3 0)(=P z M4-4 θαsin sin )(Pa M AB =P 4-5 3C A B WT T T ===4-6 1kN T =,0=Ax F ,750N Ay F =-,500N Az F =-,433N Bx F =,500N BZ F = 4-7 F F F -==61,F F =3,0542===F F F·313··313·4-8 321M a cM a b M +=,a M F Ay 3=,a M F Az 2=,0=Dx F ,a M F Dy 3-=,aM F Dz 2-= 4-9 4kN Ax F =,146kN Az F .=-,79kN Bx F .=,29kN Bz F .=-4-10 5kN Ox F =-,4kN Oy F =-,8kN Oz F =,32kN m Ox M =⋅,30kN m Oy M =-⋅,20kN m Oz M =⋅4-11 (a ) 10412kN N F .=,20213kN N F .=,30375kN N F .= 4-12 )(22221221r r r r x C --=,0=C y4-13 (a ) 589mm C x .=-,0=C y (b ) 797mm C x .=,349mm C y .= 4-14 )(22221221r r r r x C --=,0=C y4-15 0Ax F =,121(P )2Ay F P =-+,21P 2Az P F =+,0Cx F =,0Cy F =,22Cz P F =第5章5-1 min F =,s arctan f α= 5-2 )()m m sin +cos -P F αϕθϕ=,m θϕ=5-3 (1) A 先滑动,(2) A 、B 一起滑动 5-4 能保持平衡,S 201N F = 5-5 223.0=f5-6 3πarcsin 43πff α=+5-7 1s sin cos P F f αα=-,2s sin cos PF f αα=+,故21F F >5-8 min 845kN Q .= 5-9 435N P .=5-10 θ≤9926.︒5-11 120cm x >5-12 s 2(sin cos )Q R f L αα⋅+≤P ≤s 2(sin cos )Q Rf L αα⋅-5-13 min 1475N P .=5-14 4961N m .⋅≤C M ≤7039N m .⋅ 5-15 11cm b <5-16s s sin cos cos sin f Q f αααα-+≤P ≤s s sin cos cos sin f Q f αααα+- 5-17 arc ϕ=·314··314·5-18 500N P = 5-19 s f ≥15.0 5-20 75mm b .< 第6章6-1 (cos sin )x v lk kt kt =-,(cos sin )y v lk kt kt =-+; )sin (cos 2kt kt lk a x +-=,)sin (cos 2kt kt lk a y --= 6-2 (1) 0=s ;v R ω=;0a τ=,2n a R ω=(2) R s 23=;12v R ω=;2a ωτ=,2n 14a R ω= (3) R s =;0v =;2a R ωτ=-,n 0a =6-3 直角坐标法:t R x ω2cos =,t R y ω2sin =;2sin2x v R t ωω=-,2cos2y v R t ωω=; t R a x ωω2cos 42-=,t R a y ωω2sin 42-=自然坐标法:t R s ω2=;2v R ω=;0a τ=,2n 4a R ω= 6-4 ()sin M x l b t ω=+,()cos M y l b t ω=-;22221()()M M x y l b l b +=+-6.52222()1()x a y b l l-+=+6-6 22)sin (cos h t r l t r x B +-+=ωω,h y B -=6-7v =322xb u a -= 6-8 )cos sin arctan(00tr h tr ωωθ-=6-9 当0s t =时,157cm s M v ./=;0M a τ=,n2617cm s M a ./=当2s t =时,0M v =;2123cm s M a ./τ=-,n0M a =6-10 C x =C y =2C avv l=6-11 t e R t e y ωω222cos sin -+=;[cos v e t ωω=6-12 02cos4m x .t =;0566m s v ./=-;22263m s a ./=-6-13 0arctan rad v tbϕ=;02220rad s bv /b v t ω=+6-14 225t =ϕ;120m s v /=;236000m s n a /= 6-15 8rad s /ω=;2384rad s ./ε=-6-16 转轴O 的位置位于正方形的中心;1rad s /ω=,21rad s /ε=6-17 12C v r ω=;n 214C a r ω=,12C a r ετ=·315··315·6-18 12m s M v ./=;n 272m s M a ./=,206m s M a ./τ= 6-19 0377m s C v ./=6-20 2225000rad s /dεπ=;25922m s a ./= 6-21 32rad .ϕ=6-22 12mm h =6-23 02=ω,222r lb ωε-=6-24 02m s AB v ./=,2005m s AB a ./=;02m s C v ./=,n 20267m s C a ./=,2005m s C a ./τ=6-25 2012ωr a =,方向沿1AO ;2024ωr a =,指向轮心第7章7-1 x'vt =,cos()a kt y'ϕ=+,轨迹方程为cos()ky'a x'vϕ=+ 7-2 2cos M v R ωϕ=,方向水平向左 7-3 (a )2309rad s ./ω=; (b )2182rad s ./ω=7-4 (1)34OC v b ω=,34C lv v b=;(2)234K v a b = 7-5 当0ϕ︒=时,0v =;当30ϕ=︒时,100cm s v /=,向右;当90ϕ︒=时,200cm s v /=,向右7-6 126m s BC v ./=;2274m s BC a ./= 7-7 10cm s CD v /=;2346cm s CD a ./= 7-8 a a =7-9 3v ω=,方向向上7-10 1.732rad /s ω=,28.66rad /s ε=- 7-11 0.173m /s v =,20.05m /s a = 7-12 0.173m /s M v =,20.35m/s M a =7-13 πcos 15sin BC nr v αβ=7-14 23CD r v ω=;29310ωr a C D =7-15 a 3465mm s v ./=;21400mm s CD a /=第8章8-1 122v v r ω-=,122O v v v +=8-2 156cm s C v ./=,17cm s D v /=·316··316·8-3 877cm s C v ./=8-4 375rad s OB ./ω=,I 6rad s /ω=8-5 600mm s A v /=,200mm s B v /=,s C v /=;4rad s 3ABC /ω=,05rad s BD ./ω= 8-6 2rad s AB /ω=,2578rad s AB ./ε=-;667rad s BC ./ω=-,21926rad s BC ./ε=8-7 2()C A Rv a R r r=-,2Bx C a a τ=,2(2)()C By R r v a R r r -=- 8-8 2022ωr a B =,20211ωε=B O 8-9 032C v r ω=,20123ωr a C =8-10 01.15v l ω=8-11 16186rad s O C ./ω=,127817rad s O C ./ε=-8-12 s CD v /=,22m s 3CD a /= 8-13 n 2400cm s B a /=,21705cm s B a ./τ=-,21705cm s C a ./=-8-14 34e OC v v OB b ω==,OC ε=;12E v v =,E a = 8-15 21960mm s B a /=,298rad s AB ./ε=8-160C v ω,方向向左;rR B O 01ωω=,逆时针转向8-17 22()C Rv a R r =-,B a =8-18 n 202B a a ω=,2002)B a a ετ=-8-19 330ωω=B ;209)349(10ω+-=B a 8-20 2m s B v /=,2828m s C v ./=,28m s B a /=,21131m s C a ./= 第9章9-1 rgf=max ω 9-2 min 67r min n /=9-3 1v =9-4 0cos cos sin v x b kt kt k α=+,0sin sin vy kt kα=9-5 0cos x v t α=,201sin 2y v t gt α=+·317··317·9-6 0(1e )kt v s k-=- 9-7 202s t .=,707m s .= 9-8 172N F .=9-9 )(22g a amL F AC +=ω,)(22g a a mL F BC -=ω9-10 max 584kN F .=,min 536kN F .=9-11 g f f a ααααsin cos cos sin -+=,N cos sin W F f αα=- 9-12 )cos 1(200t m F t x ωωυ-+=第10章10-1 (a ) 12p mL ω=,方向水平向右;(b ) p mR ω=,方向水平向右;(c ) p me ω=,方向垂直于OC 的连线;(d ) C p mv =,方向水平向右10-2 30N x F =10-3 11221022a gP P P P F -++= 10-4 11r 12m v v v m m =++10-5 0(sin cos )v t g f'αα=-10-6 12(54)2l p m m ω=+,方向与曲柄垂直且向上 10-7 t m m l m x m m kx ωωsin 1211+=++10-8 2R s =10-9 (1) 3123123(22)cos ,2()C P L P P P L tx P P P ω+++=++ (2) 12123(2)sin ;2()C P P L t y P P P ω+=++2321max 222ωL gP P P F Ox ++=10-10 椭圆 2224l y x =+10-11 (1) 2sin G Wx l t P W Gω+=++ (2) 2m a x 2x G W F l g ω+=10-12 向右移377cm . 10-13 33(sin )cos ox R F m g m a r θθ=+,1233()(sin )sin oy RF m g m g a m g m a rθθ=+-++ 10-14 21212)(m m gm m f b m a ++-=·318··318·10-15 17cm A s =,向左移动;9cm B s =,向右移动 10-16 2max12(2)2ox r F F G G gω=++10-17 24(cos sin )3Ox mR F ωϕεϕπ=-+,24(sin cos )3Oy mR F mg ωϕεϕπ=+- 第11章11-1 (a ) ω2031ml L =,(b ) ω2021mR L =,(a ) ω2023mR L =11-2 208m s a ./=,2862kN T F .=,4626kN Oy F .=11-3 (1) ωωω22231ml mR Ml L O ---=,(2) ωω2231ml Ml L O --=11-4 θω22sin )312(l M m L O +=11-5 480r min n /=11-6 022ωωmr J ma J z z ++=11-7 0N 0Pr F fgt ω= 11-8 211212122()()R M R M'm m R R ε-=+11-9 )()(2212J i J gPR R PR Mi a ++-=11-10 t P P gkl)3(3cos210+=δϕ11-11 gR RW g J R W M a 2101sin +-=α,1T 1sin W F W a g α=+ 11-12 g J r m r m r m r m O++-=2222111122ε11-13 g R m r R m r R m a )()()(2222121ρ++++=,)()()(22221212ρρ+++-=R m r R m g m m Rr F11-14 v =T 13F mg =11-15 θsin 74g a =,θsin 71mg F -= 11-16 g a C 355.0=11-17 3)(2121m m gm m f F a ++-=·319··319·11-18 gr M R m r m R fm r m a 2222121ρ++-=,T 11A F m g m a =-,2T 2B m RF fm g a r=+11-19 2N 22sin 12D QL F a Lα=+,αcos g a Cx =,22212sin 12L a g a a Cy +=α 11-20 N 3633N B F .=11-21 P F F x O x O 516.021==,P F y O 434.11=,P F y O 164.12=第12章12-1 )cos 1(0ϕ+=mgr W AB ,)sin (cos 0θϕ-=mgr W AC 12-2 129904J F W .=,10500J f W =- 12-3 12206J W .=-,23206J W .=,031=W 12-4 (a) 2216T ml ω=,(b) 2234T mR ω=,(c) 2214T mR ω=,(d) 234C T mv =,12-5 10J W =重,503J W .=重12-6 θω222sin 61ml T = 12-7 21s s hf += 12-8 2122)cos (sin 2m m f gr m M r++-=ααϕϕω12-9 v=12-10 A v =12-11 A v =12-12 v =11/sin M R W a g W Wα-=+12-13 C v =45C a g =12-14 98N F .= 12-15 θωsin 3632121l g m m m m ++=,θεcos 23632121lgm m m m ++=12-16 C v =321321843)43(m m m gm m m F +++=12-17 (1) 2211)3()sin (2Rm m gR m M +-=αε, (2) R m m gR m M m F Ox )3(2)2sin cos 6(2121++=αα; ααsin )3()sin 3(21212⋅+++=Rm m gR m M m g m F Oy·320··320·12-18 v =m khmg a 34-=,41s 36F kh mg =+ 第13章13-1 αsin 32g a =13-2 g a 32=,T 3WF =13-3 Q P Pg a 322+=,QP PQF 32+=13-4 g P T a 3cos 2α=,N sin F P T α=-,s 1cos 3F T α= 13-5 22233cos sin 3()sin 2b a g b a ϕϕωϕ-=-13-6 445N ADF .=,54N BE F =13-7 2222(sin )cos sin J mr mr M ϕϕϕϕϕ++= 13-8 2222143)2(43ωr m gr m m M -+=,2143ωr m F Ox -=,4)2()(22121ωr m m g m m F Oy +-+= 13-9 0β=︒时,2329N Ax F =-,1382N Bx F =,1962N Ay By F F .==180β=︒时,12238N Ax F .=,592N Bx F =-,1962N Ay By F F .==13-10 2023ωmr F Ax -=,mgr F Ay =,20221ωmr F Bx =,mgr F By =13-11 g a a C x C 1712==,mg F 175= 13-12 l g 791=ε,lg 732-=ε,0=Ox F ,mg F Oy 72=第14章14-1 ctg 2P /Q /ϕ= 14-2 (3ctg 2)Ax F /P θ=14-3 A F P /=14-4 ctg Q P θ= 14-5 450N Q P /==14-6 12F F l =/2(cos )a ϕ14-7 05kN 21kN m Ax Ay A F F m ===⋅,,14-8 1866kN P .=14-9 2()F lx a k b=+14-10 2(kN)Ax F =, 3.804(kN)Ay F =,24(kN m)A M =-⋅,18.588(kN)B F =。
15-1 提升矿石用的传送带与水平成倾角α。
设传送带以匀加速度a 运动,为保
持矿石不在带上滑动,求所需的摩擦系数。
解:取矿石m 为研究质点,其受力分析如图所示,Q 为虚拟惯性力,根据矿石
的动平衡方程知:
α
tg α
cos g a
f ma Q ,f N F 0αcos m
g N 0Y 0αsin mg Q F 0
X +≥∴=⋅≤=+=∑=--=∑
15-2 矿车重P 以速度v 沿倾角为α的斜坡匀速下降,运动总阻力系数为f ,尺
寸如图;不记轮对的转动惯量,求钢丝绳的拉力。
h 当制动时,矿车作匀减速运动,制动时间为t ,求此时钢丝绳的拉力和轨道法向反力。
解:取矿车为研究质点,其受力分析如图所示,Q 为虚拟惯性力。
(1) 匀速下降,Q=0
)
αcos f α(sin P T f )N N (F 0αcos P N N 0
Y 0
αsin P F T 0
X B A B A -=∴⋅+==-+=∑=+--=∑
(2) 匀减速运动
F
F
制动时间为t ,作匀减速运动,加速度方向与V 相反,且:
t
V a =
⎥⎦
⎤⎢⎣⎡+++-=
∴⋅
=⋅+==⋅-⋅-⋅+⋅-⋅=∑=-+=∑=++--=∑αcos )fd 2b
()gt V α)(sin d h (b P T t V
g P Q ,f )N N (F 0
2
b αcos P h αsin P b N h Q d T 0
m 0αcos P N N 0
Y 0αsin P Q F T 0
X B A B A B A
15-3 图示凸轮导板机构,偏心轮绕O 轴以匀角速度ω转动,偏心距OA=e ,当导
板CD 在最低位置时,弹簧的压缩为b ,导板重为P 。
为使导板在运动过程
解:考虑OA 与水平线夹角为θ时的情况。
以导板为研究质点,其受力分析如图所示,Q 为虚拟惯性力。
弹力
)θsin e e b (c F ++=.
导板与偏心轮不脱离,两者沿y 向的加速度相同,
θsin ωe a 2⋅=
惯性力是
a g
P Q =
根据导板的动平衡条件:
e
2b 1g
ωe P
c 90θsin 0θsin e θsin ωe g P )θsin e e b (c P N 0
P F N Q 0
Y 2
02
+-≥∴=≥+⋅-+++=∴=--+=∑
15-4 各长为l 、重为P 的两匀质杆OA 与OB ,一端用铰链固定在铅垂轴上的O
点,另一端用水平绳连在轴上的D 处,杆与轴的夹角为φ。
今△AOB 随轴OD 以匀角速度ω转动,求绳的拉力及铰链O 对OB 的约束反力。
解:由于结构对称,绳AD 、DB 的拉力大小相等。
以OB 为研究质点,其受力
分析如图所示,Q 为虚拟惯性力,
2ω)φsin 2
l
(Q ⋅=。
根据动平衡条件:
P
Y ),φsin g
6ωl 2φtg (P X )
φsin g
3ωl 2φtg (P T 0
2
φ
sin l P 3φcos l 2Q φcos Tl 0
m 0P Y 0Y 0T X Q 0
X 02
02
o 00=-=+=∴=-⋅-⋅=∑=-=∑=-+=∑
A B
15-5 匀质圆柱重P 、半径为R ,在常力T 作用下沿水平面纯滚,求轮心的加速
度及地面的约束反力。
解:以圆柱为研究质点,其受力分析如图所示,M Q 与Q 为虚拟惯性力和力偶,
R
a g
2P
εJ M a g
P Q 00Q 0⋅=⋅==
不计滚阻M ,根据动平衡条件:
R αcos T M QR 0
m 0P N αsin T 0
Y 0F Q αcos T 0
X Q A =⋅-+=∑=-+=∑=--=∑
α
cos 3
T
F αsin T P N g P
3α
cos T 2a 0=-==
∴
15-6 绕线轮重P 、半径为R 及r ,对质心C 的转动惯量J C ,在与水平成α角的
常力T 作用下纯滚,求:(1)轮心的加速度,并分析运动;(2)纯滚条件。
解:以绕线轮为研究对象,其受力分析如图所示,M Q 与Q 为虚拟惯性力和力偶。
R
a J εJ M a g
P Q C C C Q C ⋅
=⋅==
(1)轮心的加速度a c
根据动平衡条件知:
2
C C Q A R g
P J )
r αcos R (TR a 0R Q M αsin r αsin T )αcos r R (αcos T 0
m +-=
∴=⋅++⋅+-⋅-=∑ 讨论α,可知轮的运动情况(加速、减速、匀速)。
(2)纯滚时,
N f F ⋅≤
动平衡方程:
P αsin T N 0
Y 0
Q αcos T F 0
X =-+=∑=++-=∑
T
)
R g
P
J )(αsin T P ()αcos J Rr g
P
(T f )αsin T P (f Q αcos T F 2C C +-+≥
∴-⋅≤+=∴
15-7 重为P 1重物A 沿斜面D 下降,同时籍绕过滑轮C 的绳使重为P 2的重物上
升,斜面与水平成α角;不记滑轮和绳的质量及摩擦,求斜面D 给地板E 突出部分的水平压力。
解:先以A 、B 为研究质点系,设重物的加速度为a ,其受力分析如图,惯性力为
a
g
P Q a
g
P Q 2B 1
A ==。
根据其动平衡条件:
αsin P Q T 0P Q T 1A 2B =-+=--
上式可求得重物的加速度,
g P P P αsin P a 2
12
1+-=
再以整体为研究质点系,其受力分析如图,列动平衡方程
0αcos Q N 0
X A =-=∑
α
cos P P P αsin P P N 2
12
11
+-=∴
P
Q
B
N A a。