第十五章拉格朗日方程习题解答
- 格式:doc
- 大小:558.50 KB
- 文档页数:12
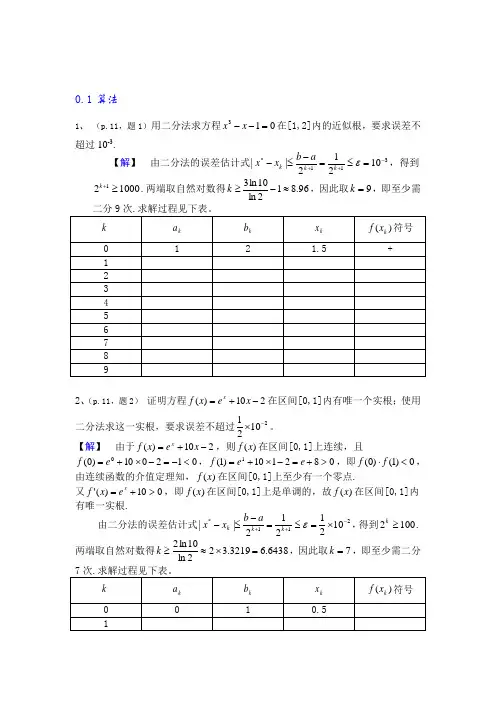
0.1算法1、 (p.11,题1)用二分法求方程013=--x x 在[1,2]内的近似根,要求误差不超过10-3.【解】 由二分法的误差估计式311*10212||-++=≤=-≤-εk k k a b x x ,得到100021≥+k .两端取自然对数得96.812ln 10ln 3≈-≥k ,因此取9=k ,即至少需2、(p.11,题2) 证明方程210)(-+=x e x f x在区间[0,1]内有唯一个实根;使用二分法求这一实根,要求误差不超过21021-⨯。
【解】 由于210)(-+=x e x f x,则)(x f 在区间[0,1]上连续,且012010)0(0<-=-⨯+=e f ,082110)1(1>+=-⨯+=e e f ,即0)1()0(<⋅f f ,由连续函数的介值定理知,)(x f 在区间[0,1]上至少有一个零点.又010)('>+=x e x f ,即)(x f 在区间[0,1]上是单调的,故)(x f 在区间[0,1]内有唯一实根.由二分法的误差估计式211*1021212||-++⨯=≤=-≤-εk k k a b x x ,得到1002≥k .两端取自然对数得6438.63219.322ln 10ln 2=⨯≈≥k ,因此取7=k ,即至少需二分0.2误差1.(p.12,题8)已知e=2.71828…,试问其近似值7.21=x ,71.22=x ,x 2=2.71,718.23=x 各有几位有效数字?并给出它们的相对误差限。
【解】有效数字:因为11102105.001828.0||-⨯=<=- x e ,所以7.21=x 有两位有效数字; 因为12102105.000828.0||-⨯=<=- x e ,所以71.22=x 亦有两位有效数字;因为3310210005.000028.0||-⨯=<=- x e ,所以718.23=x 有四位有效数字;%85.17.205.0||111=<-=x x e r ε; %85.171.205.0||222=<-=x x e r ε; %0184.0718.20005.0||333=<-=x x e r ε。
普通高等教育“十一五”国家级规划教材“过程装备与控制工程”专业核心课程教材工程流体力学(第二版)习题与解答黄卫星编四川大学化工学院过程装备与安全工程系2008年10月30日第1章 流体的力学性质1-1 用压缩机压缩初始温度为20℃的空气,绝对压力从1个标准大气压升高到6个标准大气压。
试计算等温压缩、绝热压缩、以及压缩终温为78℃这三种情况下,空气的体积减小率V ∆= 121()/V V V −各为多少?解:根据气体压缩过程方程:k pV const =,有1/2112(/)(/)k V V p p =,所以V ∆=1/1221112()11kV V Vp V V p −=−=−等温过程k =1,所以 V ∆121/11/6p p =−=−=83.33% 绝热过程k =1.4,所以 V ∆1/1.41/1.4121(/)1(1/6)p p =−=−=72.19% 压缩终温为78℃时,利用理想气体状态方程可得212121178111=80.03%620V V p T V p T ×∆=−=−=−× 1-2 图1-12所示为压力表校验器,器内充满体积压缩系数104.7510p β−=×m 2/N 的油,用手轮旋进活塞达到设定压力。
已知活塞直径D =10mm ,活塞杆螺距t =2mm ,在1标准大气压时的充油体积为V 0=200cm 3。
设活塞周边密封良好,问手轮转动多少转,才能达到200标准大气压的油压(1标准大气压=101330Pa )。
解:根据体积压缩系数定义积分可得:1d d p VV pβ=−→ 00exp[()]p V V p p β=−− 因为 02()001exp 4p p p D nt V V V βp −− =−=− 所以 21()0241=p p p nV e D tβp −− − 12.14 rpm图1-12 习题1-2附图1-3 如图1-13所示,一个底边为200mm 200mm ×、重量为1kN 的滑块在20°斜面的油膜上滑动,油膜厚度0.05mm ,油的粘度µ=2710−×Pa·s 。
数值分析课程第五版课后习题答案(李庆扬等)数值分析课程第五版课后习题答案(李庆扬等)第一章:数值分析导论1. 解答:数值分析是一门研究如何使用计算机来解决数学问题的学科。
它包括了从数学理论到计算实现的一系列技术。
数值分析的目标是通过近似的方式求解数学问题,其结果可能不是完全精确的,但是能够满足工程或科学应用的要求。
2. 解答:数值分析在实际应用中起着重要的作用。
它可以用于求解复杂的数学方程、计算机模拟及建模、数据的统计分析等等。
数值分析是科学计算和工程计算的基础,对许多领域都有着广泛的应用,如物理学、经济学、生物学等。
3. 解答:数值方法指的是使用数值计算的方式来求解数学问题。
与解析方法相比,数值方法一般更加灵活和高效,可以处理一些复杂的数学问题。
数值方法主要包括了数值逼近、插值、数值积分、数值微分、线性方程组的求解、非线性方程的求根等。
4. 解答:计算误差是指数值计算结果与精确解之间的差异。
在数值计算中,由于计算机的有限精度以及数值计算方法本身的近似性等因素,都会导致计算误差的产生。
计算误差可以分为截断误差和舍入误差两种。
第二章:数值误差分析1. 解答:绝对误差是指实际值与精确值之间的差异。
例如,对于一个计算出的数值近似解x和精确解x_0,其绝对误差为| x - x_0 |。
绝对误差可以衡量数值近似解的精确程度,通常被用作评估数值计算方法的好坏。
2. 解答:相对误差是指绝对误差与精确解之间的比值。
对于一个计算出的数值近似解x和精确解x_0,其相对误差为| (x - x_0) / x_0 |。
相对误差可以衡量数值近似解相对于精确解的精确度,常用于评估数值计算方法的收敛速度。
3. 解答:舍入误差是由于计算机的有限精度而引起的误差。
计算机中使用的浮点数系统只能表示有限的小数位数,因此在进行数值计算过程中,舍入误差不可避免地会产生。
舍入误差会导致计算结果与精确结果之间存在差异。
4. 解答:误差限度是指对于给定的数值计算问题,所能容忍的误差范围。

经典力学概论内容简介:《经典力学概论》是根据作者在中国科学技术大学讲授理论力学的讲义整理而成的,采用了较传统教科书更加自然的逻辑体系和简单易记的符号系统,从基本定律出发,循序渐进地引入抽象的数学方法,充分展示了物理理论简洁、抽象的美,在不删减课程主要内容,甚至较传统内容略丰的前提下,大大缩减了授课学时。
全书共分6章:牛顿力学、拉格朗日力学、小振动、刚体力学、哈密顿力学、有心力场,每章后附有一定数量难度适中的习题,《经典力学概论》论述严谨、精练,并对多个问题有独到的见解,可作为综合性大学和师范院校物理类专业的本科生教材,同时也适合有关专业研究人员和工程师阅读。
[1]图书目录前言第1章牛顿力学1.1 质点运动的描写1.2 坐标系1.3 质点力学1.4 运动参考系1.5 质点组力学1.6 变质量物体的运动习题1第2章拉格朗日力学2.1 约束2.2 虚功原理2.3 力学变分原理2.4 拉格朗日方程2.5 运动积分2.6 全变分习题2第3章小振动3.1 单自由度体系的小振动3.2 多自由度体系的小振动. 习题3第4章刚体力学4.1 刚体运动分析4.2 正交变换与张量4.3 欧拉角4.4 凯利-克莱茵参量4.5 惯量张量4.6 欧拉陀螺4.7 拉格朗日陀螺4.8 拉莫尔进动4.9 定轴转动与平面平行运动习题4第5章哈密顿力学5.1 哈密顿正则方程5.2 劳斯方法5.3 泊松括号5.4 相空间中的哈密顿原理5.5 正则变换5.6 哈密顿一雅可比方程5.7 作用变量与作用角变量5.8 正则微扰论习题5第6章有心力场6.1 质点在有心力场中的运动6.2 轨道6.3 平方反比力6.4 胡克力6.5 经典散射6.6 两体问题习题6习题参考答案。

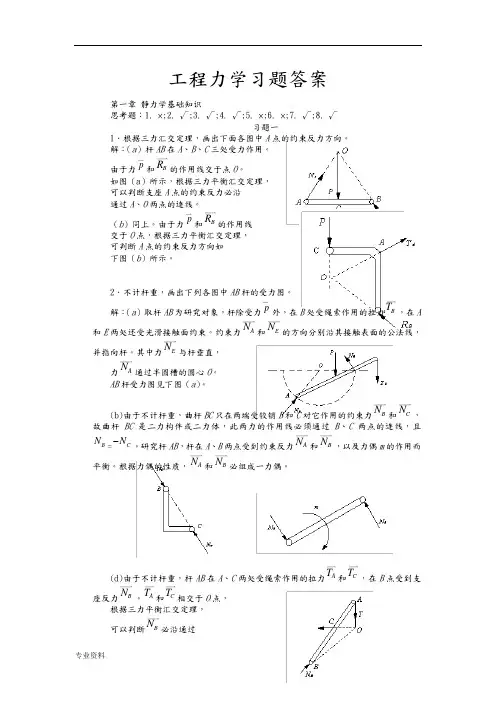
习 题15-1 如图15-7所示的升降机,在主动轮C 上作用一驱动力偶M ,使质量m 1的物体A 上升。
已知平衡物B 的质量为m 2,主动轮C 和从动轮D 都为均质圆轮,半径和质量分别为r 和m 3。
如不计胶带质量,试求A 物的加速度。
图15-7a m F A 1I = a m F B 2I = ra m r ar m MMDC323I I 21)(21=== 动力学普遍方程0δ)(δ)(δ)(I 2I 1I I =-++---s F W s F W rs MMM B A D C0)()(1)2121(221133=-++---a m g m a m g m rra m ra m Mrm m m gr m m M a )()(32112++-+=15-2 图15-8所示调速器由两个质量各为m 1的滑块及质量为m 2的平衡重块组成,长l 的杆不计重量,弹簧刚度为k ,当θ = 0时,为原长。
若调速器绕铅垂轴等角速度旋转,试求ω与θ的关系。
图15-8θωsin 211I l m F = )c o s 1(θ-=kl F 动力学普遍方程0δ)(δ22211I =+-r F g m r F θθcos δsin δ21r r = θt a n δδ12r r = 故0tan δ)]cos 1([δsin 212121=-+-θθθωr kl g m r l mθθωcos 2)cos 1(122l m kl g m -+=15-3 如图15-9所示,板DE 质量为m 1,放在三个质量均为m 2的滚子A 、B 和C 上,今在板上作用一水平向右的力F ,使板与滚子运动。
如板与滚子,以及滚子与水平面之间均无滑动,试求板DE 的加速度.滚子可视为均质圆柱,不计滚动摩擦。
图15-9DE a m F 11I = 2/22I DE a m F = DE DE Ora m ra r m M222I 41)2(21==动力学普遍方程0δ3δ3δ)(2I 22I 11I =---ϕC M r F r F F02δ4132δ23δ)(121211=⨯⨯-⨯--rr ra m r a m r a m F DE DE DE08921=--DE DE a m a m F212198889m m F m m F a DE +=+=15-4 椭圆规尺放在水平面内,由曲柄带动,如图15-10所示。
第一章 函数极限与连续之勘阻及广创作一、填空题1、已知x x f cos 1)2(sin +=,则=)(cos x f 。
2、=-+→∞)1()34(lim 22x x x x 。
3、0→x 时,x x sin tan -是x 的阶无穷小。
4、01sin lim 0=→xx k x 成立的k 为。
5、=-∞→x e x x arctan lim 。
6、⎩⎨⎧≤+>+=0,0,1)(x b x x e x f x 在0=x 处连续,则=b 。
7、=+→xx x 6)13ln(lim0。
8、设)(x f 的定义域是]1,0[,则)(ln x f 的定义域是__________。
9、函数)2ln(1++=x y 的反函数为_________。
10、设a 是非零常数,则________)(lim =-+∞→xx ax a x 。
11、已知当0→x 时,1)1(312-+ax 与1cos -x 是等价无穷小,则常数________=a 。
12、函数xx x f +=13arcsin)(的定义域是__________。
13、lim ____________x →+∞=。
14、设8)2(lim =-+∞→xx ax a x ,则=a ________。
15、)2)(1(lim n n n n n -++++∞→=____________。
二、选择题1、设)(),(x g x f 是],[l l -上的偶函数,)(x h 是],[l l -上的奇函数,则中所给的函数必为奇函数。
(A))()(x g x f +;(B))()(x h x f +;(C ))]()()[(x h x g x f +;(D ))()()(x h x g x f 。
2、xxx +-=11)(α,31)(x x -=β,则当1→x 时有。
(A)α是比β高阶的无穷小; (B)α是比β低阶的无穷小; (C )α与β是同阶无穷小; (D )βα~。
高等动力学习题答案第一章1.1解:由此图可以看出,该均质杆的长度为L,并已知该杆的两个端点的坐标分别为A (1x ,1y ),B (2x ,2y ),建立坐标系,根据其几何关系可确定其约束方程:(1x - 2x )2+ (1y -2y )2=L 2 又∵△BOD ∽△BAC∴h/(1y -2y )=(-2x )/( 1x - 2x )=222x h +/L所谓的完整系统即系统中的约束均为完整约束(仅对质点的位形加以限制约束)的系统,在此系统中的约束仅对杆的位形加以限制约束,故为完整系统。
另外,均质杆的B 和O 两点与台阶构成点接触(高副),故f=3-2=1即自由度为1。
O()111x y P,()222x y P ,∙∙vxy题1.2图1.2.解:因为制导系统保证质点p 1的速度v 始终对准质点p 2,所以,p 1p 2所形成的直线)(x f y =的斜率为2121yxy yx xθ-=-=tan可见是对位形和速度加以限制,此系统是非完整系统。
因为p 2有两个自由度,p 1有一个自由度,所以此系统有三个自由度。
1.3.解:(1)因为AB 是长度为l 的刚性杆,故AB 两点坐标应该满足方程为:2l(2)选择中点C O 的坐标c x ,c y 和相对轴X 的倾角θ为广义坐标。
因为接触点A 的速度只能沿与AB 杆垂直方向即:11yx=-cot θ ①2121cot x x y y θ-=- ②①②两式联立得: 121121()()0xx x y y y -+-= (3)32312L H f n p p =--=-= 故此系统为二自由度的非完整系统。
1.4 解:由几何关系知12cos 22lR ϕϕ+= 12002cos 2l l l R l ϕϕ+∴∆=-=- 对系统有 2222112222120112211(2cos )222T m R m R V k l k R l ϕϕϕϕ=++=∆=-因此,拉格朗日函数为 222221211220111(2cos )2222L T V m R m R k R l ϕϕϕϕ+=-=+-- 所以21112111121201sin .2cos 22Lm R d L m R dt L kR R l ϕϕϕϕϕϕϕϕϕ∂=∂⎛⎫∂= ⎪∂⎝⎭++∂⎛⎫=- ⎪∂⎝⎭由于1ϕ,2ϕ是对称的,所以有1212022222sin .2cos 22L kR R l d L m R dt ϕϕϕϕϕϕϕ++∂⎛⎫=- ⎪∂⎝⎭⎛⎫∂= ⎪∂⎝⎭由拉格朗日方程0j d L Ldt q q ⎛⎫∂∂-= ⎪ ⎪∂∂⎝⎭有 2121211021212220sin .2cos 022sin .2cos 022m R kR R l m R kR R l ϕϕϕϕϕϕϕϕϕϕ++⎛⎫--= ⎪⎝⎭++⎛⎫--= ⎪⎝⎭⇒12121101212220sin .2cos 022sin .2cos 022m R k R l m R k R l ϕϕϕϕϕϕϕϕϕϕ++⎛⎫--= ⎪⎝⎭++⎛⎫--= ⎪⎝⎭所以,能量积分为T V C +=即222221211220111(2cos )2222m R m R k R l C ϕϕϕϕ+++-=化简为2222212112201(2cos)2m R m R k R l C ϕϕϕϕ+++-=1.5.选取两圆柱的转角21,ϕϕ为广义坐标,由题意可知.22.11ϕϕR R V B +=此系统的动能为:21.122211.22.21)(21)(212121ϕϕϕϕϕR m R R m J J T C B B A ++++=21121R m J B =22221R m J B =故:.212132.22.112.22222.2121121)(214141ϕϕϕϕϕR m R R m R m R m T ++++=.2.1212.22222.212132143)224(ϕϕϕϕR R m R m R m m m ++++= 系统势能:1322112)(ϕϕϕg m R R g m V ++-=拉格朗日函数: V T L -=)(43)224(22112112.2.1212.22222.2121321ϕϕϕϕϕϕϕR R g m gR m R R m R m R m m m ++-++++= 由拉格朗日方程:0)(.2.2=∂∂-∂∂ϕϕLL dt d (i=1,2) 0)224(21213..2212..121321=-++++gR m gR m R R m R m m m ϕϕ 1 02322..1212..2222=-+gR m R R m R m ϕϕ2整理1,2式, 其能量积分:C V T =+即:C R m R m R m g R R m R m R m m m =--+++++)(43)2(222112113.2.1212.22222.2121321ϕϕϕϕϕϕϕ 1.6解;此系统的自由度=21021323=-⨯-⨯=--h l p p n ,此系统为二自由度完整系统。
第一章 单自由度系统1.1 总结求单自由度系统固有频率的方法和步骤。
单自由度系统固有频率求法有:牛顿第二定律法、动量距定理法、拉格朗日方程法和能量守恒定理法。
1、 牛顿第二定律法适用范围:所有的单自由度系统的振动。
解题步骤:(1) 对系统进行受力分析,得到系统所受的合力;(2) 利用牛顿第二定律∑=F x m,得到系统的运动微分方程;(3) 求解该方程所对应的特征方程的特征根,得到该系统的固有频率。
2、 动量距定理法适用范围:绕定轴转动的单自由度系统的振动。
解题步骤:(1) 对系统进行受力分析和动量距分析;(2) 利用动量距定理J ∑=M θ,得到系统的运动微分方程;(3) 求解该方程所对应的特征方程的特征根,得到该系统的固有频率。
3、 拉格朗日方程法:适用范围:所有的单自由度系统的振动。
解题步骤:(1)设系统的广义坐标为θ,写出系统对于坐标θ的动能T 和势能U 的表达式;进一步写求出拉格朗日函数的表达式:L=T-U ; (2)由格朗日方程θθ∂∂-∂∂∂LL dt )( =0,得到系统的运动微分方程; (3) 求解该方程所对应的特征方程的特征根,得到该系统的固有频率。
4、 能量守恒定理法适用范围:所有无阻尼的单自由度保守系统的振动。
解题步骤:(1)对系统进行运动分析、选广义坐标、写出在该坐标下系统的动能T 和势能U 的表达式;进一步写出机械能守恒定理的表达式 T+U=Const (2)将能量守恒定理T+U=Const 对时间求导得零,即0)(=+dtU T d ,进一步得到系统的运动微分方程;(3) 求解该方程所对应的特征方程的特征根,得到该系统的固有频率。
1.2 叙述用衰减法求单自由度系统阻尼比的方法和步骤。
用衰减法求单自由度系统阻尼比的方法有两个:衰减曲线法和共振法。
方法一:衰减曲线法。
求解步骤:(1)利用试验测得单自由度系统的衰减振动曲线,并测得周期和相邻波峰和波谷的幅值i A 、1+i A 。
习 题15-1 如图15-7所示的升降机,在主动轮C 上作用一驱动力偶M ,使质量m 1的物体A 上升。
已知平衡物B 的质量为m 2,主动轮C 和从动轮D 都为均质圆轮,半径和质量分别为r 和m 3。
如不计胶带质量,试求A 物的加速度。
图15-7a m F A 1I = a m F B 2I = ra m r ar m MMDC323I I 21)(21=== 动力学普遍方程0δ)(δ)(δ)(I 2I 1I I =-++---s F W s F W rs MMM B A D C0)()(1)2121(221133=-++---a m g m a m g m rra m ra m Mrm m m gr m m M a )()(32112++-+=15-2 图15-8所示调速器由两个质量各为m 1的滑块及质量为m 2的平衡重块组成,长l 的杆不计重量,弹簧刚度为k ,当θ = 0时,为原长。
若调速器绕铅垂轴等角速度旋转,试求ω与θ的关系。
图15-8θωsin 211I l m F = )c o s 1(θ-=kl F 动力学普遍方程0δ)(δ22211I =+-r F g m r F θθcos δsin δ21r r = θt a n δδ12r r = 故0tan δ)]cos 1([δsin 212121=-+-θθθωr kl g m r l mθθωcos 2)cos 1(122l m kl g m -+=15-3 如图15-9所示,板DE 质量为m 1,放在三个质量均为m 2的滚子A 、B 和C 上,今在板上作用一水平向右的力F ,使板与滚子运动。
如板与滚子,以及滚子与水平面之间均无滑动,试求板DE 的加速度.滚子可视为均质圆柱,不计滚动摩擦。
图15-9DE a m F 11I = 2/22I DE a m F = DE DE Ora m ra r m M222I 41)2(21==动力学普遍方程0δ3δ3δ)(2I 22I 11I =---ϕC M r F r F F02δ4132δ23δ)(121211=⨯⨯-⨯--rr ra m r a m r a m F DE DE DE08921=--DE DE a m a m F212198889m m F m m F a DE +=+=15-4 椭圆规尺放在水平面内,由曲柄带动,如图15-10所示。
设曲柄OC 与椭圆规尺AB 都为均质杆,质量分别为m 1和2m 1,且OC =AC =BC =l 。
滑块A 与B 的质量相等均为m 2,如作用在曲柄上的驱动力矩为M O 不计摩擦,试求曲柄的角加速度。
图15-10同习题12-6ωl v C = ωω=AB ϕωωϕc o s 2c o s 2l l v AB A =⨯= ϕωs i n 2l v B = B A AB OC E E E E E k k k k k +++=)(21])2)(2(121[21)2(21)31(2122222121221B A C v v m l m v m l m ++++=ωω 222221*********3161ωωωωl m l m l m l m ⨯+++=2221243ωl m m +=2221243ϕl m m += O Q M W F =∑=ϕϕϕδδ由ϕϕϕQ F E E t=∂∂-∂∂k k )(d dO M l m m =+)2(243221α221)43(lm m M O+=α15-5 如图15-11所示,铰接平行四边形机构O 1O 2AB 位于铅直平面内,杆O 1A ,O 2B 各长l ,质量不计;杆AB 为均质杆,质量m 。
设在O 1A 杆上作用一常力矩M ,试求O 1A 转动到任意位置时的角加速度,并求︒=90θ时的角加速度的值。
图15-11以θ为广义坐标,先求广义力给系统虚位移θδθθθθsin δδδ)(l mg M W F⨯-=∑θθθθsin δδ)(mgl M W F FQ -=∑=222k 21)(21θθ ml l m E ==由 θθθQ F E E t =∂∂-∂∂k k )(d dθθ 2k ml E =∂∂ 0k =∂∂θE θθsin 2mgl M ml -=2sin mlmgl M θθα-==︒=90θ时 2mlmgl M -==θα15-6 如图15-12所示,在质量为m 1的均质圆柱C 上绕着一根细绳,绳的质量可以不计。
绳的另一端跨过不计质量的滑轮O 与质量为m 2的物块A 相连,物块放在粗糙的水平面上,动摩擦因数为μ。
如果圆柱由静止落下作平面运动,试求物块和圆柱质心的加速度。
图15-12以A x 、C y 为广义坐标,先求广义力显然g m F Ax Q2μ-= g m F Cy Q1=2212122k ))(21(212121r x y r m y m x m E A C C A -++=212122)(412121A C C A x ym ym xm -++= ]32)2[(41211221C C A A y m y x m x m m +-+= ])2[(21)(d d 121k C A A y m x m m x E t -+=∂∂ 0k =∂∂A x E ]3[21)(d d 11k C A C ym x m y E t +-=∂∂ 0k =∂∂Cy E代入拉氏方程 Ax QAA F x E xE t =∂∂-∂∂k k )(d dCy QCC F y E yE t=∂∂-∂∂k k )(d d得g m ym x m m C A 2121])2[(21μ-=-+ g m ym x m C A 111]3[21=+- 解得g m m m m xA 212133+-=μ g m m m m yC 21213)32(+-+=μ即 g m m m m a A 212133+-=μ g m m m m a C 21213)32(+-+=μ15-7 如图15-13所示,一绳跨过两定滑轮A 与B ,并吊起一动滑轮C ,绳子不在滑轮上的各端都是铅垂的,滑轮上吊有重W =40N 的重物,绳的两端分别挂有重量各为W 1=20N ,W 2=30N 的两重物。
如滑轮与绳的重量以及轴承的摩擦均可不计,试求这三个重物的加速度。
图15-13以1y 、2y 为广义坐标(向下为正)221222211k )2(212121y y m ym y m E +++=221222211)2(212121y y m y m ym +++=2122221141)4(81)4(81y ym ym m ym m ++++= 2212211p y y mg gy m gy m E ++--=241)4(81)4(8121221121222211p k y y mg gy m gy m y ym ym m ym m E E L +-++++++=-=]41)4[(41)(d d 2111ym y m m y L t ++=∂∂ g m m y L )2(11-=∂∂ ]41)4[(41)(d d 1222ym ym m y Lt ++=∂∂ g m m y L )2(22-=∂∂代入拉氏方程 0)(d d 11=∂∂-∂∂y L y Lt0)(d d 22=∂∂-∂∂y L y Lt得0)2(]41)4[(411211=--++g mm ym ym m0)2(]41)4[(412122=--++g mm ym ym m 0)24()4(1211=--++g m m y m y m m 0)24(])4(2122=--++g m m y m y m m 04012021=+y y 0401604021=-+g yy 解得g y1111-= g y1132=即 g a 1111-=(向上) g a 1132=(向下) g a 111=(向上)15-8 图15-14所示滑轮组中,三个物块A ,B ,C 质量分别为m A =10kg , m B =20kg ,m C =20kg 。
物块与地面间的动摩擦因数均为μ=0.2,滑轮质量不计,试求各重物的加速度。
图15-14以A x (向右为正)、C x (向左为正)为广义坐标,先求广义力显然g m g m F A B x QAμ-=2g m g m F C B x QCμ-=2222k )2(212121C A B C C A A x x m xm x m E +++=]41)4(81)4(8122C A B C B C A B A x x m xm m x m m ++++= C B A B A A x m x m m x E t 41)4(41)(d d k ++=∂∂ 0k =∂∂A x E A B C B C C xm xm m xE t 41)4(41)(d d k ++=∂∂ 0k =∂∂Cx E代入拉氏方程Ax Q AA F x E xE t=∂∂-∂∂k k )(d d Cx Q CC F x E x E t=∂∂-∂∂k k )(d d得g m g m xm xm m A B C B A B A μ-=++241)4(41g m g m xm xm m C B A B C B C μ-=++241)4(41g x x C A 322060=+ g xx C A 2410020=+ 解得2m/s 76.47034==g xA 2m /s 4.171==g x C即 2m/s 76.4=A a (向右) 2m /s 4.1=C a (向左) 2m /s 08.3=C a (向下)15-9 用动力学普遍方程推导刚体平面运动微分方程。
15-10 如图15-15所示,半径为r 的滑轮可绕水平轴O 转动,在滑轮上跨过一不可伸长的绳,绳的一端悬挂质量为m 1的重物C ,另一端与刚性系数为k 的铅垂弹簧相连。
设滑轮的质量m 2均布于轮缘上,绳与滑轮间无滑动。
试求系统的振动周期。
图15-15以C 的铅垂位移C y 为广义坐标(向下为正)22221k ))((2121ry r m ym E C C +=221)(21C ym m += 22st 2st 1p 21])[(21C C C ky y k gy m E =-++-=δδ2221p k 21)(21C C ky y m m E E L -+=-=C C ym m y Lt )()(d d 21+=∂∂ C Cky y L -=∂∂代入拉氏方程0)(d d =∂∂-∂∂CC y L yL t0)(21=++C C ky y m m 021=++C C y m m k y21m m k +=ω km m T 21π2π2+==ω15-11如图15-16所示,椭圆摆由一半径为r ,质量为m 1的均质圆盘A 与一小球B 构成,圆盘可沿水平面纯滚动。