汽车后桥壳 焊接
- 格式:pdf
- 大小:268.43 KB
- 文档页数:5
汽车后桥焊接生产工艺摘要:针对三菱越野后桥的结构特点及特殊的性能要求,本文主要从后桥壳母体材料、焊接方法、焊丝及焊接参数等方面详细介绍了汽车后桥的焊接工艺。
采用该焊接工艺能可靠地保证后桥壳四环焊处各项性能要求,成功避免桥壳断裂等不良现象的出现,并能满足批量生产的要求。
关键词:焊接材料、环焊、焊接结构、CO2气体保护焊、自动焊、焊接工艺参数Abstract: Because of the special structure and technicalrequirement of Rear Axles for MMC Light Off-Road Vehicle .In this paper , the selection of mother blank of Rear Axle Housing and welding wire , method of welding and welding parameters are discussed in detail inorder to introduce welding technique of Rear Axle . This welding technique can ensure the quality of girth welding at four places on Rear Axle, and avoid these defects such as rupture of axle housing. At the same time, this welding technique can meet the requirement of mass production.Key words: welding materials; girth welding; welding structure; carbon dioxide gas shielded arc welding; automatic welding; welding parameters后桥是汽车的关键零部件之一,其焊接质量的好坏关系到汽车的安全性问题。
提高中型驱动后桥壳焊接接头疲劳寿命的方法说到中型驱动后桥壳焊接接头的疲劳寿命,哎呀,这可真是个让人头疼的话题!你要知道,那个后桥,简直就是整个车的命脉,稍微有个啥小问题,车子就能给你“开小差”,让你面临一些棘手的麻烦。
尤其是那些焊接接头,老是暴露在各种复杂的应力、温度和环境条件下,时间一长就容易疲劳,甚至断裂。
你想,这一旦出现问题,可不得了!车主或者工程师可真是要抓狂了。
别看这小小的焊接接头,它可不像我们想象的那么简单。
焊接工艺就像厨师做菜一样,不同的手法和材料,最后出来的味道差别大着呢。
最常见的做法是先选用好材料,确保焊接接头的质量过关。
俗话说,“工欲善其事,必先利其器”,用不好的焊材就像厨师拿个生锈的锅煮菜,怎么可能好吃?所以,选对了焊条、焊丝,材料强度也就有了保障。
焊接过程中可得保持温度稳定,温度一旦波动,焊接接头的性能可能就大打折扣,那可就麻烦了。
不过,别急,我们还可以从其他方面着手!像是优化焊接接头的形状和尺寸,真的比你想象的更重要。
有些焊接接头一开始就设计得不太理想,焊缝处可能会有尖锐的角落,或者焊接不均匀,稍微承受一下力量,就像爆米花一样,“噼里啪啦”地炸开了。
所以啊,设计时最好考虑到力学性能,避免那些不必要的应力集中区域。
就像我们平常走路,别让鞋子有凸起的地方,否则走着走着就容易崴脚,不小心就掉链子。
再聊聊一种常见的手段——预热。
这可是不少老司机的“秘密武器”!通过在焊接前加热焊接部位,能够有效减少焊接过程中的温差,避免裂纹的产生。
想象一下,如果你冰箱里的食物突然被拿到阳光下暴晒,温差太大岂不是炸开了?焊接也是一样的道理,温差大了,内部的应力积累就会导致疲劳,时间长了接头就容易崩溃。
此外,冷却速度的控制也是个技术活儿。
太快就容易形成脆性结构,太慢又会影响生产效率。
我们常说“急不得,来得快不一定好”。
控制好冷却速度,既能保证焊接接头的强度,又能提高焊接效率,一举两得,岂不美哉?说到这里,别以为这些都是纸上谈兵,光理论上做得再好,没有实际操作经验也不行。
后八轮后桥壳子的焊法
后八轮后桥壳子的焊法是指将汽车后桥壳子与车架相连的连接方式。
在汽车制造过程中,后八轮后桥壳子是汽车车架的重要部分,其连接
方式直接影响汽车的稳定性和安全性。
因此,采用恰当的焊接方法是
至关重要的。
通常,汽车制造商会采用三种不同的后八轮后桥壳子焊接方法:电弧焊、气体保护焊和点焊。
其中,电弧焊是一种常用的方法,它使用高
温电弧将两个金属部件融合在一起。
这种焊接方式可以无需使用填充
材料,但需要使用电极将电弧传递到焊接部位。
相比之下,气体保护
焊需要保护气体,可以在焊接期间避免金属氧化和其他污染物质的危害。
该方法还可以使用多种填充材料,以增强焊接部位的强度。
最后,点焊是一种既快捷又经济的焊接方式,它使用电流将焊点加热,从而
将车架和壳子固定在一起。
在确定焊接方法之前,汽车制造商还需要考虑材料的性能和使用环境。
例如,在一些恶劣的工作条件下,如高温和高压,最好使用气体保护
焊或点焊。
如果壳体非常脆弱或要求具有更高的强度或耐久性,则应
使用电弧焊或气体保护焊。
此外,焊接设备的可用性和成本也是重要
的考虑因素。
总而言之,后八轮后桥壳子的焊接方法对汽车的安全性和耐用性至关重要。
选择适当的焊接方法可以保障汽车的质量和长期使用经验。
在制造车辆时,汽车制造商应根据汽车的用途和工作条件,综合考虑各种因素,选择最佳的焊接方法。
汽车后桥壳内高压成形工艺及胀型模具设计汽车后桥壳是几何形状较为复杂的零件,目前汽车桥壳的主要生产方式是铸造和冲压焊接。
铸造工艺对材料和能源太过浪费,零件的力学性能较差;冲压焊接工艺的焊缝质量难保证,材料利用率较低。
利用液压胀形工艺成形整体桥壳能克服以上缺陷,节约材料和能源,同时工序少、材料利用率高。
本文研究汽车后桥壳鼓包部分的液压胀型工艺。
針对汽车后桥壳特点,采用半滑动式液压胀形工艺,能够有效降低合模压力的整体式的滑动模块,同时固定模块可防止飞边的出现,也考虑了取件问题。
本设计的亮点是整体式的滑动模块具备分担大部分的管坯胀形力,降低设备吨位的作用;设计的预胀形模具和终胀形模具滑动模块部分能够共用,减少模具开发制造费用。
标签:汽车桥壳;半滑动式;液压胀形;模具设计汽车桥壳属于大型复杂异型截面零件,它保护着内部的主减速器,差速器,半轴等零件,并承受着车身重量与车轮传来的力矩。
其作用及性能,要求既有足够的强度和刚度,又要尽量减轻质量;而且在保证桥壳使用要求的前提下,力求结构简单,制造方便,以利于降低成本。
车桥主要有两种生产方式:铸造和冲压焊接。
铸造可以制造出形状较为复杂的车桥,但铸造件重量大,消耗材料和能源多,较为浪费。
冲压-焊接成形工艺较好,废品率低,重量轻,强度高,并且成本较低[1]。
但冲压焊接工艺工序多,费材耗能,焊缝长,对焊缝质量要求较高。
而利用液压胀形工艺生产桥壳则材料利用率高,节省能源和材料,加工工序较少,且加工效率高,易实现机械化、自动化[2]。
壁厚合理,应力分布较好,刚度高,重量轻。
本设计就是要依据图1-1所给的后桥壳相关尺寸,材料为20号碳钢无缝管。
图1-1为设计中桥壳为轻型车后桥壳,鼓包部分的最大直径为440mm,最小直径68mm,长度为1953mm,桥壳壁厚为10mm,均匀管径为127mm。
为了减少变形过程中变形量过大导致径缩胀形失败,选取了直径为127mm,厚度为10mm的管胚,这样可以保证大部分材料不流动就可以满足桥壳设计要求。
某车型驱动桥后桥壳开裂分析某款车型在矿区山路行驶过程中,驱动桥后桥壳在钢板弹簧位置附近发生开裂,有齿轮油渗出,此失效后桥壳为钢板冲压件,通过气体保护焊焊接而成,其主体为上下两半冲压件。
本文主要对失效件断口通过宏观观察、微观分析、金相检测,确定后桥壳开裂性质,分析可能开裂的原因。
标签:驱动桥后桥壳;钢板弹簧;开裂;断口分析驱动桥后桥壳是汽车重要的组成部分,它不但支撑着汽车的重量,将载荷传递给车轮,还承受制动工况、驱动工况、横向工况、纵向工况及上下跳工况产生的力或力矩,并经悬架传递给车身或车架。
在汽车行驶过程中,由于道路条件的千变万化,桥壳受到车轮与地面间产生的冲击载荷影响,可能引起桥壳变形或开裂,甚至断裂,因此驱动桥后桥壳应具有足够的强度和刚度。
同时其内部装有减速器、差速器、车轮传动装置及齿轮油,不但可以保护上述零部件受到外界的破坏,还可以通过内部的齿轮油润滑零部件之间的摩擦,降低零部件摩擦产生的温度,提高其寿命,所以合理的设计制造驱动桥后桥壳是提高汽车行驶稳定性和操作性的重要措施,如驱动桥后桥壳失效,会影响整车操稳,甚至发生交通事故,威胁生命。
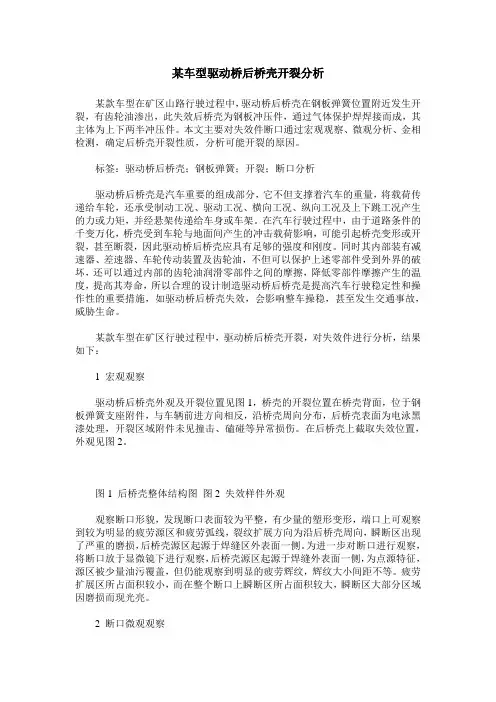
某款车型在矿区行驶过程中,驱动桥后桥壳开裂,对失效件进行分析,结果如下:1 宏观观察驱动桥后桥壳外观及开裂位置见图1,桥壳的开裂位置在桥壳背面,位于钢板弹簧支座附件,与车辆前进方向相反,沿桥壳周向分布,后桥壳表面为电泳黑漆处理,开裂区域附件未见撞击、磕碰等异常损伤。
在后桥壳上截取失效位置,外观见图2。
图1 后桥壳整体结构图图2 失效样件外观观察断口形貌,发现断口表面较为平整,有少量的塑形变形,端口上可观察到较为明显的疲劳源区和疲劳弧线,裂纹扩展方向为沿后桥壳周向,瞬断区出现了严重的磨损,后桥壳源区起源于焊缝区外表面一侧。
为进一步对断口进行观察,将断口放于显微镜下进行观察,后桥壳源区起源于焊缝外表面一侧,为点源特征,源区被少量油污覆盖,但仍能观察到明显的疲劳辉纹,辉纹大小间距不等。
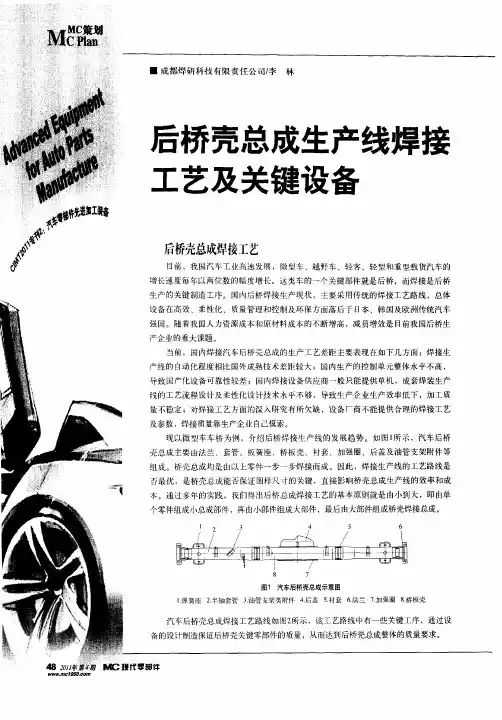
浅析轻型汽车后桥桥壳焊接工艺作者:文/杨阳陈龙李柯刘新亚来源:《时代汽车》 2018年第3期摘要:汽车后桥壳是汽车传动系统中一个重要的组成部分,其中承重和传力、弯矩、扭矩均由汽车后桥来承受;当前冲焊桥壳成为我国汽车后桥桥壳主流的加工工艺,因此,焊接工艺的好坏成为影响汽车整体性能和安全的一个重要课题。
本文针对轻型汽车后桥桥壳的特点和使用性能,主要从后桥壳选用母材、焊接方法、焊丝及焊接参数等方面详细介绍了汽车后桥的焊接工艺。
采用该焊接工艺能可靠地保证后桥壳的焊接质量并满足批量生产要求。
关键词:轻型汽车;后桥桥壳;焊接工艺1 引言后桥是汽车的关键零部件之一,其焊接质量的好坏直接关系到汽车的安全性问题,它不但要承重和传力,还要承受由动载荷和静载荷所引起的较大的弯矩和扭矩,为此要求后桥应具有足够的强度、刚度和韧性,这就对桥壳的焊接质量提出了很高的要求,进而来满足桥壳的使用功能。
2 冲焊桥壳的基本结构形式我公司生产的桥壳的基本结构形式如图1所示,两端半轴套管材料为45,桥壳上、下片材料为Q345,板厚为8mm;桥壳后盖材料为Q235,板厚为4mm。
3焊接工艺性分析及方案制定桥壳母材采用Q345板材冲压而成,Q345为低合金结构钢,它比Q235类型的低碳钢抗拉强度和屈服强度高一等级,具有良好的可焊性。
半轴套管是该汽车后桥的重要组成部件,连接桥壳中段和两端法兰盘,因此,需要有较高的刚性和耐磨性。
我司半轴套管采用45,45属于中碳钢,此种材料具有较好塑性,但焊接性较差,空冷时焊缝热影响区会出现针状马氏体组织,硬度大,塑性差,易产生脆性断裂,而且可供选择的焊接规范非常小,当电流过小时则熄弧,焊缝成形不良,电流过大时则咬边,冷却速度稍大时则产生热裂纹”’。
因此,为提高焊接接头的综合性能,在焊接过程中需要控制焊接线能量及焊接接头含氢量冈,焊前需要预热,焊后需要缓冷。
考虑到焊接接头的综合性能和生产效率,在生产过程中我公司采用了生产效率高、便于机械化和自动化生产、焊缝中含氢量少的C02气体保护焊的焊接方法。
毕业论文
1.题目:轻型汽车后桥壳总成后帽组对夹具设计
2.论文任务内容及要求:
(1)论文任务结合“轻型汽车后桥壳总成后帽焊接结构件”的结构特点,选择适合CO2气体保护焊工艺点固焊的装配工艺并借助自行设计的组对夹具进行装配。
并达到生产节拍3.5分钟的生产能力。
(2)要求:
首先参考相关资料,了解轻型汽车后桥壳总成中后帽的形状、尺寸及作用和结构特点等。
然后,针对3mm厚16Mn低合金钢的后帽,选择具体装配工艺参数,装夹定位方案、制定相关组对工艺。
最后,设计绘制出该组对夹具的结构2A0设计图纸,写出1.5--1.8万字的设计说明书。
此外,还要查找一篇相关的外文(英语原文),翻译成汉语----至少2500--3000字左右。
3.实习总结报告
返校时,将实习报告填写适当内容,盖上实习单位公章,交给学院。