串级控制系统设计及仿真
- 格式:docx
- 大小:419.86 KB
- 文档页数:14
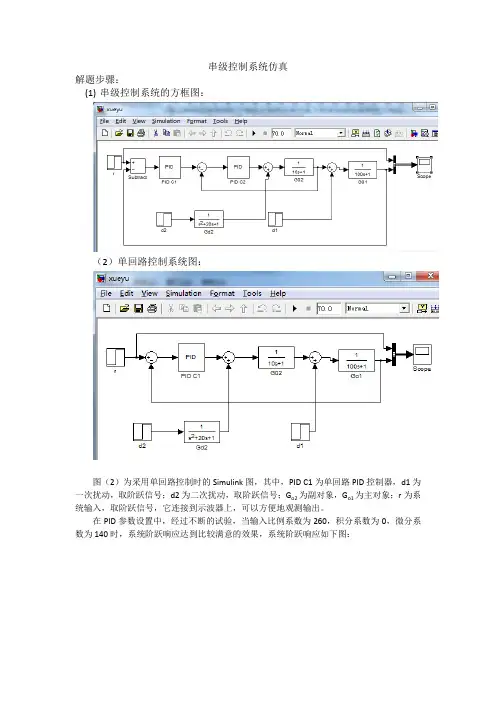
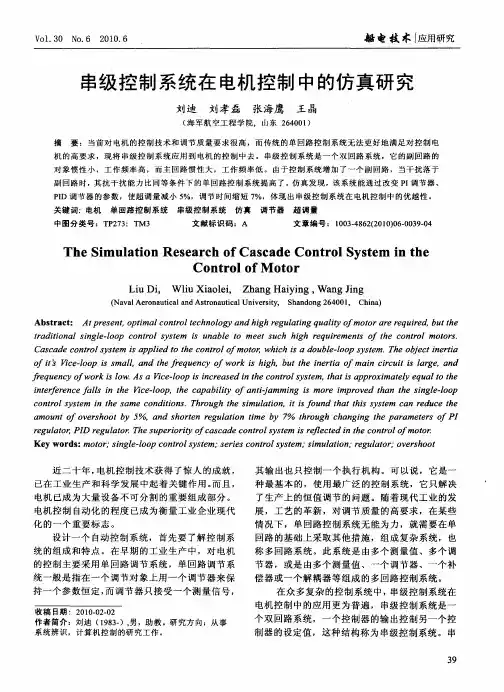
串级控制系统仿真解题步骤:(1)串级控制系统的方框图:(2)单回路控制系统图:图(2)为采用单回路控制时的Simulink图,其中,PID C1为单回路PID控制器,d1为一次扰动,取阶跃信号;d2为二次扰动,取阶跃信号;G o2为副对象,G o1为主对象;r为系统输入,取阶跃信号,它连接到示波器上,可以方便地观测输出。
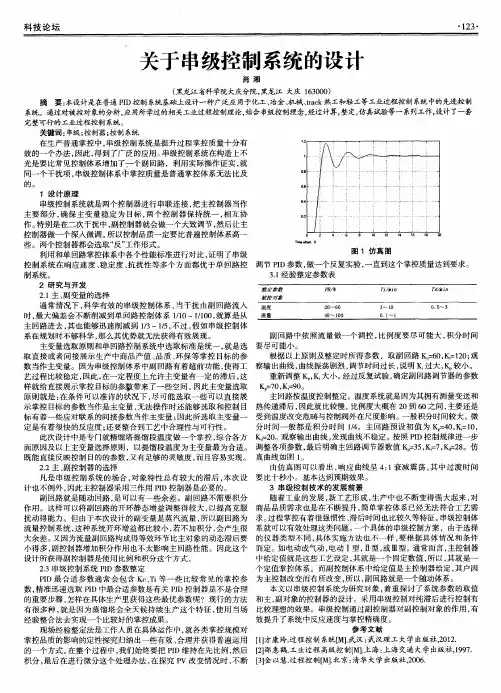
在PID参数设置中,经过不断的试验,当输入比例系数为260,积分系数为0,微分系数为140时,系统阶跃响应达到比较满意的效果,系统阶跃响应如下图:采用这套PID参数时,二次扰动作用下,置输入为0,系统框图如下。
系统的输出响应如下图:采用这套PID参数时,一次扰动作用下,置输入为0,系统框图如下:系统的输出响应如下从综合以上各图可以看出,采用单回路控制,系统的阶跃响应达到要求时,系统对一次扰动,二次扰动的抑制效果不是很好。
图(1)是采用串级控制时的情况,d1为一次扰动,取阶跃信号;d2为二次扰动,取阶跃信号;PID C1为主控制器,采用PD控制,PID C2为副控制器,采用PID控制;Go2为副对象,Go1为主对象;r为系统输入,取阶跃信号;scope为系统输出,它连接到示波器上,可以方便地观测输出。
经过不断试验,当PID C1为主控制器输入比例系数为550,积分系数为0,微分系数为80时;当PID C2为主控制器输入比例系数为3,积分系数为0,微分系数为0时;系统阶跃响应达到比较满意的效果,系统阶跃响应如下图所示:采用这套PID参数时,二次扰动作用下,置输入为0,系统的框图如下:系统的输出响应如下图:采用这套PID参数时,一次扰动作用下,置输入为0,系统的框图如下:系统的输出响应如下图:从表中可以看出系统的动态过程改善更为明显,可见对二次扰动的最大动态偏差可以减小约6倍,对一次扰动的最大动态偏差也可以减小约2.4倍,系统的调节时间提高了2.5倍。
单回路控制系统在副扰动下的单位阶跃响应曲线如下:串级控制系统在副扰动作用下的节约响应曲线如下:通过对比两曲线可以看出,串级控制系统中因为副回路的存在,当副扰动作用时,副控制器会立即动作,削弱干扰的影响,使被副回路抑制过的干扰再进入主回路,对主回路的影响。
上海电力学院计算机测控系统课程设计课题:基于DCS技术的串级控制系统仿真专业:自动化班级:姓名:学号:双容水箱水箱水位串级控制系统设计一、课程设计目的1、熟悉掌握P3DCS 的分散控制系统组态的步骤和流程。
2、学会参照P3DCS 和使用说明,进行DCS 组态。
3、通过对计算机监控系统的设计、配置和实现,掌握计算机测控技术在过程控制领域的应用。
4、学会设计简单的系统组态。
二、课程设计内容采用P3DCS 系统设计完成水箱水位串级控制系统并进行参数整定和调试,包括数据库组态、SAMA 图组态、流程图组态、操作器组态,设计手动和单回路自动控制、串级自动控制等控制方案,并实现手自动无扰切换和报警,设计相应的模拟量控制和逻辑控制方案并实现,进行仿真、参数整定与系统调试。
其中上水箱水位的对象传递函数为s e s s G 321142)(-+=上水箱水位对下水箱水位传递函数为se s s G 511242.1)(-+=其它执行器和测量电路的传递函数简化为K = 1三、系统概述设计串级回路控制的目的就是在控制系统中加入副回路,从而加快系统的调节速度和增强系统的动态性能。
主副回路控制系统的PID 参数采用两步整定法,先整定副回路上水箱的PID 参数使之达到稳定,然后再整定主回路的参数使之达到稳定的状态。
并通过P3DCS 组态软件对系统的曲线进行实时监控,调出最优PID 参数。
系统的工艺流程如下图(图 1)所示:图 1 系统连接图根据水箱系统的结构,我们设置一个串级控制回路,把下水箱作为串级控制系统的主控制回路,上水箱作为串级的副控制回路。
从而得出串级控制系统的方框图如(图2)所示:图 2 系统方框图四、实验设计及步骤1、打开主程序到登陆界面。
2、登入后进入系统主界面点击系统数据库图标,进行各参数的设置与说明。
图 3 进行各参数的设置与说明3、进行sama图制作,对其中元件进行设定。
对被控对象进行定值,然后对PID参数进行设置,主回路的K1设为2,K2 为0.25,副回路的K1为 2 ;然后再进行M/A模块的设置。
目录1.串级控制的基本概念 (1)2.串级控制系统的原理 (1)3.串级控制系统的特点 (1)4.串级控制主、副控制器的设计 (4)5.Simulink仿真 (6)6.串级控制的改进 (8)附录 (10)参考文献 (11)1.串级控制的基本概念串级控制系统为双闭环或多闭环控制系统,控制系统内环为副控对象,外环为主控对象。
内环的作用是将外部扰动的影响在内环进行处理,而尽可能不使其波动到外环,这就加快了系统的快速性并提高个系统的品质,因此串级控制系统中选择内环时应考虑其响应速度要比外环快得多。
2.串级控制系统的原理串级控制在结构上形成的两个闭环,一个在闭环里面,成为内环、副环或副控回路,其控制器为副控制器,在控制中起“粗调”的作用;一个闭环在外面,成为外环、主环或主控回路,其控制器称为主控制器,在控制中起“细调”作用,最终被控量满足控制要求。
主控制器的输出作为副控制器的给定值,而副控制器的输出则去控制被控对象。
图1为串级控制系统的结构图。
图1 串级控制系统的结构图 3.串级控制系统的特点(1) 副控制回路具有快速性,能够有效的克服进入副控回路的二次干扰。
图2为简化串级控制系统的结构图,其中)(2S G v 为二次干扰通道传递函数。
图2 串级控制系统简化结构图当二次干扰经扰动通道)(2S G v 进入副控回路后,首先影响副参数)(2S Y ,于是副控制器立即动作,力图削弱干扰对)(2S Y 的影响。
显然,干扰经副控回路的抑制后再进主控回路,对)(S Y 的影响将有较大的减弱。
按图2所示的串级系统,二次干扰)(2S V 到主参数)(S Y 的传递函数是)()()()()()(1)()()()(221122122S G S D S G S D S G S D S G S G S V S Y v ++= (3.1) 为了与一个简单单环控制系统相比,由图3可以得到单回路控制下干扰)(2S V 至主参数)(S Y 的传递函数是)()()(1)()()()(21122S G S G S D S G S G S V S Y v += (3.2)图3 单回路控制系统结构图比较(3.1)和(3.2),假定)()(1S D S D =,可以看到串级系统中的)()(2S V S Y 的分母中多了一项,即)()(22S G S D 。
实验四 串级控制实验内容:SIMULINK 建模仿真 学生信息:自动化XXX 提交日期:20XX 年5月28日 报告内容: 串级控制一、实验目的1. 通过比较单回路控制系统与串级控制系统,进一步加深对串级控制的认识; 2. 掌握串级控制的参数整定方法。
二、实验设备1. 计算机1台2. MATLAB 7.X 软件1套。
三、实验步骤已知某串级控制系统的主副对象的传递函数G o1,G o2分别为:211,1001101o G s s ==++,121()101o o G s s =+,副回路干扰通道的传递函数为:221()201d G s s s =++。
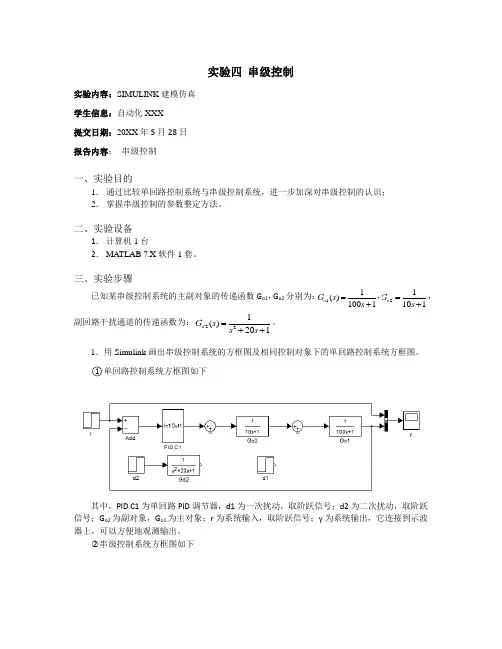
1.用Simulink 画出串级控制系统的方框图及相同控制对象下的单回路控制系统方框图。
○1单回路控制系统方框图如下其中,PID C1为单回路PID 调节器,d1为一次扰动,取阶跃信号;d2为二次扰动,取阶跃信号;G o2为副对象,G o1为主对象;r 为系统输入,取阶跃信号;y 为系统输出,它连接到示波器上,可以方便地观测输出。
○2串级控制系统方框图如下其中,PID C1为主调节器,采用PD调节,PID C2为副调节器,采用P调节;q1为一次扰动,取阶跃信号;q2为二次扰动,取阶跃信号;G o2为副对象,G o1为主对象;r为系统输入,取阶跃信号;y为系统输出,它连接到示波器上,可以方便地观测输出。
2.选用PID调节器,整定调节器的参数,并绘制相应的单位阶跃响应曲线。
进行调节器的参数整定,当输入比例系数为260,积分系数为0,微分系数为140时,系统阶跃响应达到比较满意的效果,记录系统阶跃响应图。
采用这套PID参数时,二次扰动作用下,置输入为0,系统框图如下,记录系统的输出响应图。
采用这套PID参数时,一次扰动作用下,置输入为0,系统框图如下,记录系统的输出响应图。
综合以上各图可以看出采用单回路控制,系统的阶跃响应达到要求时,系统对一次和二次扰动的抑制效果不是很好。
北方民族大学学士学位论文论文题目:基于MATLAB的液位与流量串级控制系统设计与仿真院(部)名称: 电气信息工程学院专业: 电气工程及其自动化论文提交时间: 2011年5月20日论文答辩时间: 2011年5月28日学位授予时间:北方民族大学教务处制毕业设计(论文)原创性声明和使用授权说明原创性声明本人郑重承诺:所呈交的毕业设计(论文),是我个人在指导教师的指导下进行的研究工作及取得的成果。
尽我所知,除文中特别加以标注和致谢的地方外,不包含其他人或组织已经发表或公布过的研究成果,也不包含我为获得及其它教育机构的学位或学历而使用过的材料。
对本研究提供过帮助和做出过贡献的个人或集体,均已在文中作了明确的说明并表示了谢意。
作者签名:日期:指导教师签名:日期:使用授权说明本人完全了解大学关于收集、保存、使用毕业设计(论文)的规定,即:按照学校要求提交毕业设计(论文)的印刷本和电子版本;学校有权保存毕业设计(论文)的印刷本和电子版,并提供目录检索与阅览服务;学校可以采用影印、缩印、数字化或其它复制手段保存论文;在不以赢利为目的前提下,学校可以公布论文的部分或全部内容。
作者签名:日期:学位论文原创性声明本人郑重声明:所呈交的论文是本人在导师的指导下独立进行研究所取得的研究成果。
除了文中特别加以标注引用的内容外,本论文不包含任何其他个人或集体已经发表或撰写的成果作品。
对本文的研究做出重要贡献的个人和集体,均已在文中以明确方式标明。
本人完全意识到本声明的法律后果由本人承担。
作者签名:日期:年月日学位论文版权使用授权书本学位论文作者完全了解学校有关保留、使用学位论文的规定,同意学校保留并向国家有关部门或机构送交论文的复印件和电子版,允许论文被查阅和借阅。
本人授权大学可以将本学位论文的全部或部分内容编入有关数据库进行检索,可以采用影印、缩印或扫描等复制手段保存和汇编本学位论文。
涉密论文按学校规定处理。
作者签名:日期:年月日导师签名:日期:年月日摘要随着科学技术的不断进步,在现代各种复杂控制系统中,串级控制系统占有较大比重;串级控制系统是过程控制中的一种多回路控制系统,是为了提高单回路控制系统的控制效果而提出来的一种控制方案。
湖南科技大学信息与电气工程学院《课程设计报告》题目:串级调速系统的仿真与设计专业:电气工程及其自动化班级:电气三班姓名:学号:指导教师:***任务书一、串级调速原理绕线转子异步电动机用转子串接电阻、分段切换可进行调速,此法调速性能与节能性能都很差。
采用转子回路引入附加电动势,从而实现电动机调速的方法称为串级调速。
晶闸管串级调速是异步电动机节能控制广泛采用的一项技术,目前国内外许多著名电气公司均生产串级调速系列产品。
串级调速的工作原理是利用三相整流将电动机转子电动势变换为直流,经滤波通过有源逆变电路再变换为三相工频交流返送回电网。
串级调速主电路如图1-1所示,逆变电压Uβ为引入转子电路的反电动势,改变逆变角β即可以改变反电动势大小,达到改变转速的目的。
Ud是转子整流后的直流电压,其值为错误!未找到引用源。
当电动机转速稳定,忽略直流回路电阻时,则整流电压Ud 与逆变电压Uβ大小相等方向相反。
当逆变变压器T1二次线电压为U2l时,则所以错误!未找到引用源。
上式说明,改变逆变角β的大小即可以改变电动机的转差率,实现调速。
通常电动机转速越低返回电网的能量越大,节能越显著,但调速范围过大将使装置的功率因数变差,逆变变压器和交流装置的容量增大,一次投资增高,过串级调速比宜定在2:1以下。
图1-1 串级调速主电路二、调速过程1. 起动接通KM1、KM2,利用频敏变电阻器起动电动机。
当电动机起动后,断开KM2接通KM3,电动机转入串级调速。
2. 调速电动机稳定运行在某转速此时Ud = Uβ,如β角增大则Uβ减少,使转子电流瞬时增大,致使电动机转矩增大转速提高、使转差率s减少,当Ud 减少到Uβ相等时,电动机稳定运行在较高的转速上;反之减少β的值则电动机的转速下降。
3. 停车先断开KM1,延时断开KM3,电动机停车。
三、参数计算1. 电机选择本设计选取三相异步电动机,调速范围为D= 20。
三相异步电动机主要技术数据如下:额定输出功率7.5KW;定子绕组额定线电压380V;定子绕组额定相电流12A; 定子绕组每相电阻0.5欧姆;定子绕组接线形式Y;转子额定转速980rpm;转子形式:鼠笼式;转子每相折算电阻:3欧姆;转子折算后额定电流30A;额定功率因数:0.75;电机机电时间常数2S; 电枢允许过载系数1.5;电网额定电压:380/220V; 电网电压波动10%;环境温度:-40~+40摄氏度;环境相对湿度:10~90%.转差率:3%;调速范围:D=20;电流超调量小于等5%;空载起动到额定转速时的转速超调量小于等于30%;稳速精度:0.03.2. 逆变变压器参数计算逆变变压器二次线电压:逆变变压器容量:因为I T2N = I2N,所以:3. 整流电路和逆变电路器件选择直流回路的额定电流:错误!未找到引用源。
基于 MATLAB 的串级控制系统的仿真摘要本文基于MATLAB的Simulink工具箱对单容水箱的液位串级控制系统经行了仿真,通过使用建模法和一些试验,验证了串级控制提高系统性能和稳定性的作用。
关键字 MATLAB 串级控制系统 PID 仿真MATLAB是美国Math Works公司出品的商业数学软件,用于数据分析、无线通讯、深度学习、图像处理与计算机数学、信号处理、量化金融与风险管理、机器人,控制系统等领域。
在MATLAB工具包中有一个Simulink模块,可以对控制系统进行仿真,为工业控制系统的设计和精确控制提供参考。
本文基于化工系统中常见的单容水箱系统进行分析,通过对经典的PID闭环回路系统进行仿真,验证了串级系统对提高控制系统性能的作用。
1.串级系统原理串级系统由两个调节器串联工作,其中一个调节器输出作为另外一个调节器的给定信号。
该系统主要包括两个回路,主回路和副回路。
当系统中扰动发生时,破坏了原来的稳定状态,根据位置不同,可分为一次扰动和二次扰动。
在串级系统中,由于引入了一个副回路,能及早克服进入副回路的扰动,由副回路进行粗调,主回路进行细调,从而提升控制品质。
串级控制系统采用PID控制算法,其中副回路往往只整定KP和TI两个参数,而主回路整定KP,TI和TD三个参数。
在过程控制中,按偏差的比例(P)、积分(I)和微分(D)进行控制的装置称为PID控制器。
PID控制的本质就是根据输入的偏差值,按照比例、积分、微分的函数关系进行运算,结果用来控制输出。
在工业控制系统中,理想的连续控制系统PID规律为:其中,Kp——控制器的比例系数,与比例度P互为倒数Ti——控制器的积分时间,又称积分系数Td——控制器的微分时间,又称微分系数u(t)——控制器的输出信号e(t)——测量值和给定值之间的偏差1.串级系统设计与建模图1是一种工厂常用的液位和流量串级系统,其主要特征是有两个调节器,一个液位调节器和一个进液流量调节器,两个调节器之间是串联关系,其中液位调节器的输出是流量调节器的给定。
毕业设计报告(论文)(2012届)题目:温度流量串级控制系统仿真设计所属系:班级:学生姓名:学号:同组成员:指导教师:摘要串级控制是改善和提高控制品质的一种有效方案,以锅炉为目标,冷却管出口水温为主控参数,出口流量为副控参数,利用PLC模拟量控制与组态王画面做出系统仿真。
以温度影响来改变流量的大小,再而以流量大小的冷却速度去影响水温的变化。
从而达到一个串级控制。
本设计中正是运用串级控制来实现对锅炉内醋酸发酵需要一个外部与内部环境为目的设计的,使用到PLC采集数据,之后同时输出模拟量对主调节阀实现一个控制,再以主调节阀去控制负调节阀,达到一个主副相互引导的理论。
关键词:PLC、组态王、串级控制。
目录第一章绪论1.1课题背景目前,可编程控制器在国内已经广泛应用于机械制造、钢铁冶炼,石油化工,煤炭电力建筑建材、轻工纺织、交通运输、食品加工医疗保健、环保和娱乐等众多行业应用领域及其广泛。
因此我们作为在校的学生更要等多的了解PLC与其应用。
我们在学习的过程中,也做了很多的PLC的应用,例如跑马灯、灯光喷泉、交通指示灯,等等。
组态软件大约在20世纪80年代中期在国外出现,在中国也有将近20年的历史。
但在90年代中期之前,组态软件在我国的应用并不普及随着工业控制系统应用的深入,随着计算机硬件和软件技术的发展,工业控制系统应用规模逐步扩大,控制更为复杂,原有的上位机编程的开发方式费时费力,而且网络及数据库技术的发展,似的工业现场可以为企业的生产、经营、决策提供更详细和深入的数据,以便优化企业生产经营中的各个环节。
因此,组态软件在国内的应用逐渐得到了普及。
组态监控系统有所突破的在配置系统功能方面,它将现场监控、远方监控、保护、自动化以及一次设备有机地配合到一起。
有待创新的是向计算机化、网络化、智能化,保护、控制、测量和数据通信一体化的方向发展,最大限度地发挥它资源共享、信息共享、数字通信的优势。
、通过PLC的模拟量控制,与组态王的模拟建面。
水箱水位串级控制系统建模与仿真摘要:本设计充分利用自动化仪表技术,计算机技术和自动控制技术,来对水箱水位的串级控制系统进行建模与仿真。
首先对被控对象的模型进行分析,并采用实验建模法求取模型的传递函数。
其次,根据被控对象模型和被控过程特性设计串级控制系统,在MATLAB中对其进行性能进行分析。
然后设计PID控制算法,完成控制系统实验和结果分析。
关键词:实验建模;串级控制系统; PID控制;MATLAB 仿真The Modeling and Simulation of Tank level Cascade Control SystemAbstract: In order to make the modeling and simulation of water tank level cascade control system, this design takes advantage of automated instrumentation technology, computer technology and automatic control technology. First, make analysis for the controlled object model and strike the transfer function by using the experimental modeling method. Secondly, according to the controlled object model and the characteristics of the controlled process, design cascade control system in MATLAB to analyze its performance. Then design the PID control algorithm, complete control system experiments and analysis of results.Keywords:Experimental modeling; Cascade control system; PID control; MATLAB simulation1.设计目的和意义随着现代工业生产过程的发展,对产品的产量、质量,对提高生产效率、降耗节能以及环境保护提出了更高的要求,这使工业生产过程对操作条件要求更加严格、对工艺参数要求更加苛刻,从而对控制系统的精度和功能要求更高,因此,复杂过程控制系统应用越来越广泛,另一方面,自动控制理论的发展,一些新型的先进的控制方法在工业生产过程控制中得到了逐步应用,但是这些先进控制方法需要比较复杂的运算,往往需要借助计算机数字控制来实现。
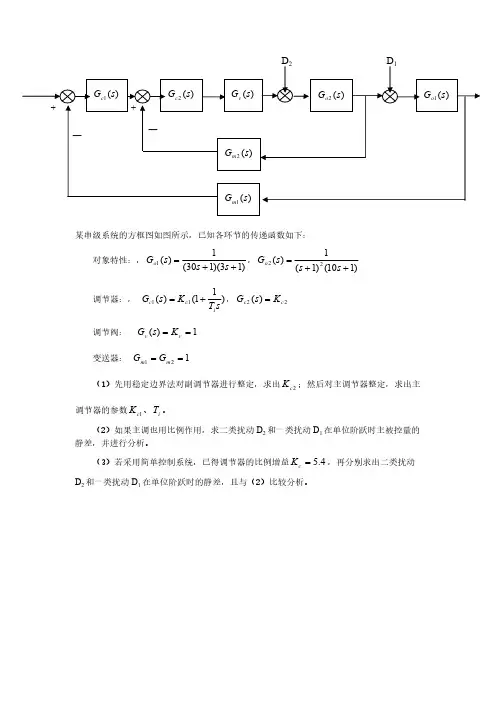
某串级系统的方框图如图所示,已知各环节的传递函数如下: 对象特性:,)13)(130(1)(1++=s s s G o ,)110()1(1)(22++=s s s G o 调节器:, )11()(11sT K s G i c c +=,22)(c c K s G = 调节阀: 1)(==v v K s G 变送器: 121==m m G G(1)先用稳定边界法对副调节器进行整定,求出2c K ;然后对主调节器整定,求出主调节器的参数1c K 、i T 。
(2)如果主调也用比例作用,求二类扰动D 2和一类扰动D 1在单位阶跃时主被控量的静差,并进行分析。
(3)若采用简单控制系统,已得调节器的比例增益4.5=c K ,再分别求出二类扰动D 2和一类扰动D 1在单位阶跃时的静差,且与(2)比较分析。
过程控制系统设计仿真实验报告实验名称:串级控制系统仿真实验姓名:学号:班级:一、实验目的1. 掌握串级控制系统的组成和原理2. 掌握串级控制系统两步法PID 参数整定过程。
3. 理解掌握串级控制系统的动态特性和克服扰动能力。
二、实验步骤(1)a:先用稳定边界法对副调节器进行整定,求出2c K =1/P2=12.1①使系统处于串级运行状态,主,副调节器均为比例作用的条件下,先将主调节器的比例度 P1置于100%刻度上,然后有大到小逐渐降低副调节器的比例度P2,直到系统对输入的阶跃 响应出现临界振荡,记下这时的比例放大系数Pm=0.0412;②根据所记录的Pm ,用195页的经验公式计算调节器的整定参数:P2=2Pm=0.0824。
b:然后对主调节器整定,求出主调节器的参数1c K =1/P1=9.9、iT =9.86。
①在副调节器的比例度等于2Pm 的条件下,逐步降低主调节器的比例度P1,直到同样得到临 界振荡,记下这时的比例放大系数Pm=0.0459和临界振荡周期Tm=11.6。
②根据所记录的Pm 和Tm ,用195页的经验公式计算调节器的整定参数: P1=2.2Pm=0.10098,iT =0.85Tm=9.86。