串级控制系统仿真
- 格式:doc
- 大小:396.50 KB
- 文档页数:7
实验四串级控制系统实验一、实验目的1.通过实验了解水箱液位串级控制系统组成原理。
2.掌握水箱液位串级控制系统调节器参数的整定与投运方法。
3.了解阶跃扰动分别作用于副对象和主对象时对系统主控制量的影响。
二、实验设备1.THPCAT-2型现场总线过程控制对象系统实验装置;2.AT-I智能调节仪表挂件、RS485/232转换器及RS485通讯线;3.PC机。
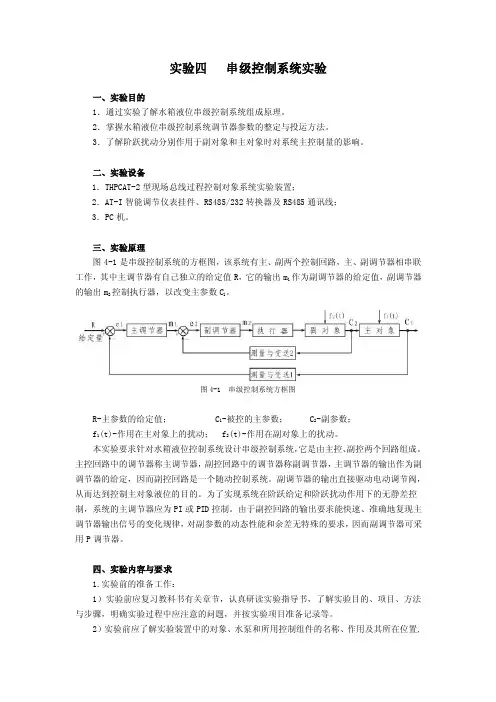
三、实验原理图4-1是串级控制系统的方框图,该系统有主、副两个控制回路,主、副调节器相串联工作,其中主调节器有自己独立的给定值R,它的输出m1作为副调节器的给定值,副调节器的输出m2控制执行器,以改变主参数C1。
图4-1 串级控制系统方框图R-主参数的给定值; C1-被控的主参数; C2-副参数;f 1(t)-作用在主对象上的扰动; f2(t)-作用在副对象上的扰动。
本实验要求针对水箱液位控制系统设计串级控制系统,它是由主控、副控两个回路组成。
主控回路中的调节器称主调节器,副控回路中的调节器称副调节器,主调节器的输出作为副调节器的给定,因而副控回路是一个随动控制系统。
副调节器的输出直接驱动电动调节阀,从而达到控制主对象液位的目的。
为了实现系统在阶跃给定和阶跃扰动作用下的无静差控制,系统的主调节器应为PI或PID控制。
由于副控回路的输出要求能快速、准确地复现主调节器输出信号的变化规律,对副参数的动态性能和余差无特殊的要求,因而副调节器可采用P调节器。
四、实验内容与要求1.实验前的准备工作:1)实验前应复习教科书有关章节,认真研读实验指导书,了解实验目的、项目、方法与步骤,明确实验过程中应注意的问题,并按实验项目准备记录等。
2)实验前应了解实验装置中的对象、水泵和所用控制组件的名称、作用及其所在位置,如图4-2所示,以便于在实验中对它们进行操作和观察。
3)熟悉实验装置面板图,要求做到由面板上的图形、文字符号能准确找到该设备的实际位置;4)熟悉工艺管道结构、每个手动阀门的位置及其作用。
实验四 串级控制实验内容:SIMULINK 建模仿真 学生信息:自动化XXX 提交日期:20XX 年5月28日 报告内容: 串级控制一、实验目的1. 通过比较单回路控制系统与串级控制系统,进一步加深对串级控制的认识; 2. 掌握串级控制的参数整定方法。
二、实验设备1. 计算机1台2. MATLAB 7.X 软件1套。
三、实验步骤已知某串级控制系统的主副对象的传递函数G o1,G o2分别为:211,1001101o G s s ==++,121()101o o G s s =+,副回路干扰通道的传递函数为:221()201d G s s s =++。
1.用Simulink 画出串级控制系统的方框图及相同控制对象下的单回路控制系统方框图。
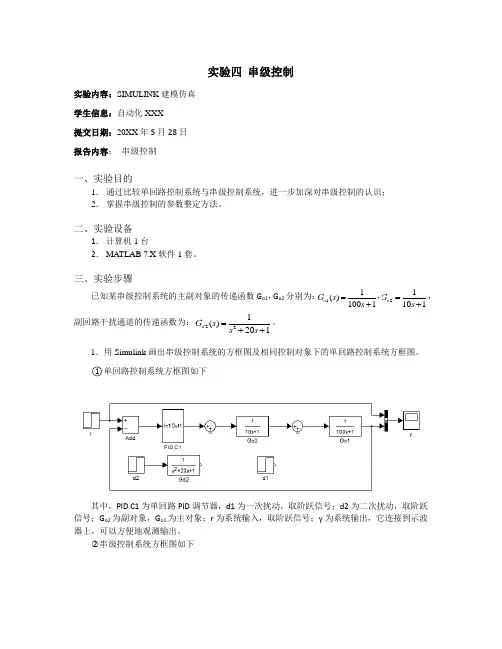
○1单回路控制系统方框图如下其中,PID C1为单回路PID 调节器,d1为一次扰动,取阶跃信号;d2为二次扰动,取阶跃信号;G o2为副对象,G o1为主对象;r 为系统输入,取阶跃信号;y 为系统输出,它连接到示波器上,可以方便地观测输出。
○2串级控制系统方框图如下其中,PID C1为主调节器,采用PD调节,PID C2为副调节器,采用P调节;q1为一次扰动,取阶跃信号;q2为二次扰动,取阶跃信号;G o2为副对象,G o1为主对象;r为系统输入,取阶跃信号;y为系统输出,它连接到示波器上,可以方便地观测输出。
2.选用PID调节器,整定调节器的参数,并绘制相应的单位阶跃响应曲线。
进行调节器的参数整定,当输入比例系数为260,积分系数为0,微分系数为140时,系统阶跃响应达到比较满意的效果,记录系统阶跃响应图。
采用这套PID参数时,二次扰动作用下,置输入为0,系统框图如下,记录系统的输出响应图。
采用这套PID参数时,一次扰动作用下,置输入为0,系统框图如下,记录系统的输出响应图。
综合以上各图可以看出采用单回路控制,系统的阶跃响应达到要求时,系统对一次和二次扰动的抑制效果不是很好。
北方民族大学学士学位论文论文题目:基于MATLAB的液位与流量串级控制系统设计与仿真院(部)名称: 电气信息工程学院专业: 电气工程及其自动化论文提交时间: 2011年5月20日论文答辩时间: 2011年5月28日学位授予时间:北方民族大学教务处制毕业设计(论文)原创性声明和使用授权说明原创性声明本人郑重承诺:所呈交的毕业设计(论文),是我个人在指导教师的指导下进行的研究工作及取得的成果。
尽我所知,除文中特别加以标注和致谢的地方外,不包含其他人或组织已经发表或公布过的研究成果,也不包含我为获得及其它教育机构的学位或学历而使用过的材料。
对本研究提供过帮助和做出过贡献的个人或集体,均已在文中作了明确的说明并表示了谢意。
作者签名:日期:指导教师签名:日期:使用授权说明本人完全了解大学关于收集、保存、使用毕业设计(论文)的规定,即:按照学校要求提交毕业设计(论文)的印刷本和电子版本;学校有权保存毕业设计(论文)的印刷本和电子版,并提供目录检索与阅览服务;学校可以采用影印、缩印、数字化或其它复制手段保存论文;在不以赢利为目的前提下,学校可以公布论文的部分或全部内容。
作者签名:日期:学位论文原创性声明本人郑重声明:所呈交的论文是本人在导师的指导下独立进行研究所取得的研究成果。
除了文中特别加以标注引用的内容外,本论文不包含任何其他个人或集体已经发表或撰写的成果作品。
对本文的研究做出重要贡献的个人和集体,均已在文中以明确方式标明。
本人完全意识到本声明的法律后果由本人承担。
作者签名:日期:年月日学位论文版权使用授权书本学位论文作者完全了解学校有关保留、使用学位论文的规定,同意学校保留并向国家有关部门或机构送交论文的复印件和电子版,允许论文被查阅和借阅。
本人授权大学可以将本学位论文的全部或部分内容编入有关数据库进行检索,可以采用影印、缩印或扫描等复制手段保存和汇编本学位论文。
涉密论文按学校规定处理。
作者签名:日期:年月日导师签名:日期:年月日摘要随着科学技术的不断进步,在现代各种复杂控制系统中,串级控制系统占有较大比重;串级控制系统是过程控制中的一种多回路控制系统,是为了提高单回路控制系统的控制效果而提出来的一种控制方案。
控制系统仿真实验报告一、实验目的本次控制系统仿真实验的主要目的是通过使用仿真软件对控制系统进行建模、分析和设计,深入理解控制系统的工作原理和性能特点,掌握控制系统的分析和设计方法,提高解决实际控制问题的能力。
二、实验设备与软件1、计算机一台2、 MATLAB 仿真软件三、实验原理控制系统是由控制对象、控制器和反馈环节组成的一个闭环系统。
其工作原理是通过传感器测量控制对象的输出,将其与期望的输出进行比较,得到误差信号,控制器根据误差信号产生控制信号,驱动控制对象,使系统的输出逐渐接近期望的输出。
在仿真实验中,我们使用数学模型来描述控制对象和控制器的动态特性。
常见的数学模型包括传递函数、状态空间方程等。
通过对这些数学模型进行数值求解,可以得到系统的输出响应,从而对系统的性能进行分析和评估。
四、实验内容1、一阶系统的仿真建立一阶系统的数学模型,如一阶惯性环节。
使用 MATLAB 绘制系统的单位阶跃响应曲线,分析系统的响应时间和稳态误差。
2、二阶系统的仿真建立二阶系统的数学模型,如典型的二阶振荡环节。
改变系统的阻尼比和自然频率,观察系统的阶跃响应曲线,分析系统的稳定性、超调量和调节时间。
3、控制器的设计与仿真设计比例控制器(P 控制器)、比例积分控制器(PI 控制器)和比例积分微分控制器(PID 控制器)。
对给定的控制系统,分别使用不同的控制器进行仿真,比较系统的性能指标,如稳态误差、响应速度等。
4、复杂控制系统的仿真建立包含多个环节的复杂控制系统模型,如串级控制系统、前馈控制系统等。
分析系统在不同输入信号下的响应,评估系统的控制效果。
五、实验步骤1、打开 MATLAB 软件,新建脚本文件。
2、根据实验内容,定义系统的数学模型和参数。
3、使用 MATLAB 中的函数,如 step()函数绘制系统的阶跃响应曲线。
4、对响应曲线进行分析,计算系统的性能指标,如超调量、调节时间、稳态误差等。
5、设计控制器,修改系统模型,重新进行仿真,比较系统性能的改善情况。
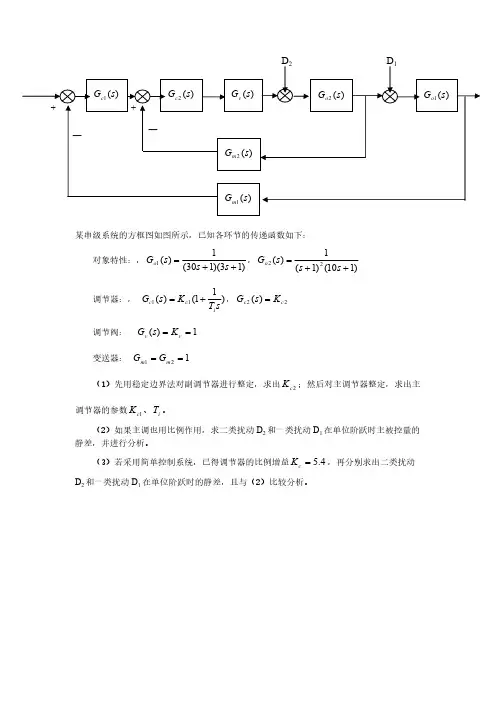
某串级系统的方框图如图所示,已知各环节的传递函数如下: 对象特性:,)13)(130(1)(1++=s s s G o ,)110()1(1)(22++=s s s G o 调节器:, )11()(11sT K s G i c c +=,22)(c c K s G = 调节阀: 1)(==v v K s G 变送器: 121==m m G G(1)先用稳定边界法对副调节器进行整定,求出2c K ;然后对主调节器整定,求出主调节器的参数1c K 、i T 。
(2)如果主调也用比例作用,求二类扰动D 2和一类扰动D 1在单位阶跃时主被控量的静差,并进行分析。
(3)若采用简单控制系统,已得调节器的比例增益4.5=c K ,再分别求出二类扰动D 2和一类扰动D 1在单位阶跃时的静差,且与(2)比较分析。
过程控制系统设计仿真实验报告实验名称:串级控制系统仿真实验姓名:学号:班级:一、实验目的1. 掌握串级控制系统的组成和原理2. 掌握串级控制系统两步法PID 参数整定过程。
3. 理解掌握串级控制系统的动态特性和克服扰动能力。
二、实验步骤(1)a:先用稳定边界法对副调节器进行整定,求出2c K =1/P2=12.1①使系统处于串级运行状态,主,副调节器均为比例作用的条件下,先将主调节器的比例度 P1置于100%刻度上,然后有大到小逐渐降低副调节器的比例度P2,直到系统对输入的阶跃 响应出现临界振荡,记下这时的比例放大系数Pm=0.0412;②根据所记录的Pm ,用195页的经验公式计算调节器的整定参数:P2=2Pm=0.0824。
b:然后对主调节器整定,求出主调节器的参数1c K =1/P1=9.9、iT =9.86。
①在副调节器的比例度等于2Pm 的条件下,逐步降低主调节器的比例度P1,直到同样得到临 界振荡,记下这时的比例放大系数Pm=0.0459和临界振荡周期Tm=11.6。
②根据所记录的Pm 和Tm ,用195页的经验公式计算调节器的整定参数: P1=2.2Pm=0.10098,iT =0.85Tm=9.86。
实验一串级控制系统组成实验一、概念在串级控制系统中,采用了主、副两只控制器,其中主控制器的输出作为副控制器的给定,而由副控制器的输出去控制控制阀。
本次实验采用仪表实验装置,其内容就是让学生自行连成液位与液位及液位与流量两个串级控制系统。
二、目的要求、1.熟悉实验装置(参见实验指导书)。
2.利用所提供的液位实验装置连成一个以二阶液位L2为主变量,一阶液位L1为副变量,F2为控制变量的液位与液位串级控制系统。
3.利用液位实验装置连成一个以二阶液位L2为主变量,以一阶液位F l为副变量和控制变量的液位与流量串级控制系统。
三、注意事项1.本次实践只连线路,不允许接通电源。
四、思考问题1.串级控制系统中主、副控制器的内、外给定开关应如何放置?2.试分析液位与液位串级控制系统在干扰作用下的工作过程。
3.已知控制阀为气闭式,并安装在水槽的入口处,试分析液位与液位串级控制系统中主、副控制器的正、反作用应如何选?实验二串级控制系统的投运和整定一、概述串级控制系统具有主、副两只控制器,因此投运和整定要比单回路系统复杂一些。
但只要按照先副后主的步骤循序进行,并掌握住投运和整定的要领,串级控制系统的投运和整定方法也是不难掌握的。
串级控制系统的整定方法很多,本次采用的是一步整定法。
即先根据副变量的类型,按经验数据将副控制器参数一次性放好,不再改变,然后再按单回路系统的4:1衰减曲线法直接整定主控制器的参数。
本次实验要求学生利用所提供的液位实验装置连成一个以二阶液位L2为主变量,一阶液位L l为副变量,F2为控制变量的液位与液位串级控制系统,并对该系统进行投运和整定实践。
二、实验目的1.串级控制系统的投运2.串级控制系统控制器参数的整定三、实验要求1.掌握串级控制系统的投运方法。
2.掌握一步整定法整定串级控制系统控制器参数的方法。
3.要求学生根据实验的目的要求自行拟定实验步骤。
4.实验完成后一星期内每人提交一份实验报告,内容要求同前。
目录1 前言................................................... 错误!未定义书签。
2 总体方案设计........................................... 错误!未定义书签。
2.1 方案比较..................................................................................... 错误!未定义书签。
2.2 方案选择..................................................................................... 错误!未定义书签。
3 反映器串级控制系统分析................................. 错误!未定义书签。
3.1 被控变量和控制变量的选择................................................... 错误!未定义书签。
3.2 主、副回路的设计................................................................... 错误!未定义书签。
3.3 主、副控制器正、反作用的选择........................................... 错误!未定义书签。
3.4 控制系统方框图....................................................................... 错误!未定义书签。
3.5 分析被控对象特性及控制算法的选择................................... 错误!未定义书签。
4 串级控制系统的参数整定................................. 错误!未定义书签。
串级控制系统仿真
解题步骤:
(1)串级控制系统的方框图:
(2)单回路控制系统图:
图(2)为采用单回路控制时的Simulink图,其中,PID C1为单回路PID控制器,d1为一次扰动,取阶跃信号;d2为二次扰动,取阶跃信号;G o2为副对象,G o1为主对象;r为系统输入,取阶跃信号,它连接到示波器上,可以方便地观测输出。
在PID参数设置中,经过不断的试验,当输入比例系数为260,积分系数为0,微分系数为140时,系统阶跃响应达到比较满意的效果,系统阶跃响应如下图:
采用这套PID参数时,二次扰动作用下,置输入为0,系统框图如下。
系统的输出响应如下图:
采用这套PID参数时,一次扰动作用下,置输入为0,系统框图如下:系统的输出响应如下
从综合以上各图可以看出,采用单回路控制,系统的阶跃响应达到要求时,系统对一次扰动,二次扰动的抑制效果不是很好。
图(1)是采用串级控制时的情况,d1为一次扰动,取阶跃信号;d2为二次扰动,取阶跃信号;PID C1为主控制器,采用PD控制,PID C2为副控制器,采用PID控制;Go2为副对象,Go1为主对象;r为系统输入,取阶跃信号;scope为系统输出,它连接到示波器上,可以方便地观测输出。
经过不断试验,当PID C1为主控制器输入比例系数为550,积分系数为0,微分系数为80时;当PID C2为主控制器输入比例系数为3,积分系数为0,微分系数为0时;系统阶跃响应达到比较满意的效果,系统阶跃响应如下图所示:
采用这套PID参数时,二次扰动作用下,置输入为0,系统的框图如下:
系统的输出响应如下图:
采用这套PID参数时,一次扰动作用下,置输入为0,系统的框图如下: 系统的输出响应如下图:
系统采用单回路控制和串级控制的对比
控制品质指标单回路控制
K c1=260,T c1=140
串级控制
K c1=550,T c1=80,K c2=3
衰减率0.75 0.75
调节时间50 20
残偏差0 0
二次阶跃扰动下的系统短期最大偏差0.0038 0.0006
一次阶跃扰动下的系统短期最大偏差0.013 0.0055
从表中可以看出系统的动态过程改善更为明显,可见对二次扰动的最大动态偏差可以减小约6倍,对一次扰动的最大动态偏差也可以减小约2.4倍,系统的调节时间提高了2.5倍。
单回路控制系统在副扰动下的单位阶跃响应曲线如下:
串级控制系统在副扰动作用下的节约响应曲线如下:
通过对比两曲线可以看出,串级控制系统中因为副回路的存在,当副扰动作用时,副控制器会立即动作,削弱干扰的影响,使被副回路抑制过的干扰再进入主回路,对主回路的影响。