工件的自由度
- 格式:ppt
- 大小:4.06 MB
- 文档页数:5

一、是非题(10分)1.任一零件可以有多个尺寸参与装配尺寸链。
(×)2.夹紧力的分布应该尽可能使夹紧力朝向工件的主要定位面,而且尽量靠近工件的加工部位。
(√)3.所有金属表面的精加工均可采用磨削加工方法得到。
(×)4.当装配精度要求较低时,可采用完全互换法装配。
(√)5.在一个尺寸链中增环的最少个数是一个。
(×)6.菱形销用在一面双销定位中,消除了垂直于连心线方向上的过定位。
(×)7.用调整法对刀时引起的工件加工误差属于随机性误差。
(×)8.表面粗糙度小的表面质量就好。
(×)9.圆偏心夹紧机构自锁性能好、生产效率高。
(×)10.设计零件的加工工艺路线时必须划分加工阶段。
(√)二、填空(20分)1.获得零件尺寸精度的方法有(试切法)、(调整法)、(定尺寸刀具法)、(自动控制法)。
2.加工细长轴时,由刀具热变形引起的工件误差属于(变值系统性误差)。
3.在选择精基准时,应遵循的原则有(基准统一)、(基准重合)、(互为基准)、(自为基准)。
4.在平面磨床上磨削平面时,若机床导轨在水平面内有直线度误差δ1,垂直面内有直线度误差δ2,则工件表面产生的形状误差是(δ2)。
5.基准位移误差是(定位)基准相对于(起始)基准发生位移造成的(工序)基准在加工尺寸方向上的最大变动量。
6.工序尺寸的公差带一般取( 入体)方向,而毛坯尺寸的公差带一般取( 双向)分布。
7.为减少毛坯形状造成的误差复映,可用如下三种方法,分别是:(增大系统刚度)、(减小毛坯误差)、(多次加工)。
8.安装是指( 定位)和( 夹紧)过程的总和。
三、概念题(16分)1.工艺系统由机床、刀具、夹具、工件组成的完整系统。
2.工位工件在机床上占据的每一个加工位置。
3.表面质量工件表面加工后,其几何形状特性和表面的物理机械性能的变化。
4.加工精度工件加工后的几何参数与理想零件相符合的程度。
为了满足杠杆臂的需要,使杠杆臂左右两端底面定位固定,因不同零件存在一定的误差,应使杠杆臂被加工两孔轴线与钻模板轴线的重合,所以将钻模板固定,又因零件要求为垂直距离,所以设计右端平面固定,左端设置螺旋辅助支撑进行左右两端垂直距离的调整定位。
使其孔轴线与钻模板轴线重合。
钻床夹具一般是由定位元件、夹紧装置、夹具体、对刀、导向元件及其他装置或元件组成。
钻床夹具主要用于钻、扩、铰孔。
在钻削加工中,工件上被加工孔的分布情况,在很大程度上决定了夹具的类型。
因此钻床夹具可分为:固定式钻床夹具、移动式钻床夹具、翻转式钻床夹具、盖板式钻床夹具、回转式钻床夹具、滑柱式钻床夹具等。
平面定位的定位元件。
工件以平面为定位基准时,常常是把工件支承在定位元件上,所以这类定位元件称为支承。
按其结构和用途不同,可分为:支承钉--1 个支承钉限制工件的1 个自由度。
支承板--1 个支承板限制3 个自由度,其中1个位置自由度,2 个角度自由度。
可调支承--可调支承限制1 个自由度。
自位支承--称为自动定位支承或多点浮动支承,只限制元件的1 个自由度。
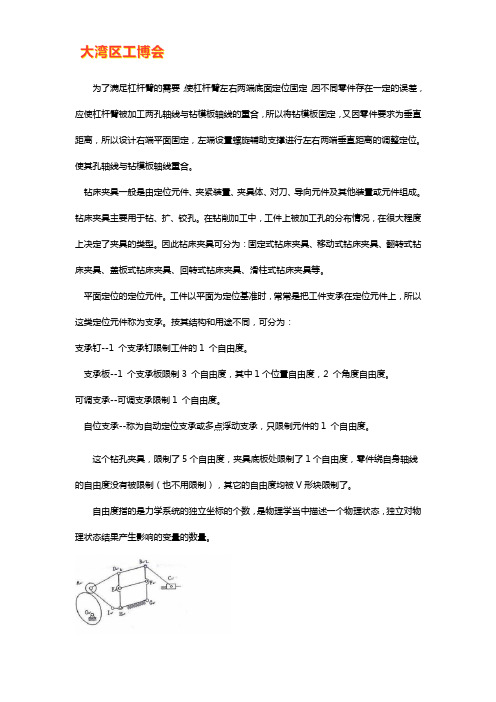
这个钻孔夹具,限制了5个自由度,夹具底板处限制了1个自由度,零件绕自身轴线的自由度没有被限制(也不用限制),其它的自由度均被V形块限制了。
自由度指的是力学系统的独立坐标的个数,是物理学当中描述一个物理状态,独立对物理状态结果产生影响的变量的数量。
所谓自由度数就是确定物体在空间的位置所需独立坐标的数目。
如运动自由度是确定一个系统在空间中的位置所需要的最小坐标数。
例如火车车厢沿铁轨的运动,只需从某一起点站沿铁轨量出路程,就可完全确定车厢所在的位置,即其位置用一个量就可确定,我们说火车车厢的运动有一个自由度。
汽车能在地面上到处运动,自由程度比火车大些,需要用两个量(例如直角坐标x,y)才能确定其位置,我们说汽车的运动有两个自由度。
飞机能在空中完全自由地运动,需要用三个量(例如直角坐标x,y,z)才能确定其位置,我们说飞机在空中的运动有三个自由度。

机械制造基础——自由度定位分析一. 填空题1. 一个圆锥芯轴通常限制工件 5 个自由度。
2. 工件的装夹过程就是定位过程和夹紧过程的综合。
3. 一个浮动的顶尖通常限制工件 2 个自由度。
4. 定位元件、夹紧装置和夹具体是夹具的基本组成部分。
5. 一个自位支承通常限制工件 1 个自由度。
6. 一个浮动的短V型块通常限制工件 1 个自由度。
7. 工件的装夹误差包括定位误差和夹紧误差两个部分。
8.一个短定位套限制工件的 2 个自由度。
9.一个固定顶尖通常限制工件的 3 个自由度。
二.判断题1. (⨯)工件在夹具中装夹,只要有6个定位支撑点就是完全定位。
2. (⨯)机械加工过程中的欠定位在有些情况下允许存在。
3. (⨯)机械加工过程中的过定位现象绝对不允许存在。
4. (⨯)对于某个工件的定位而言,如果需要限制3个自由度,但应用的定位元件限制了4个自由度,这种情况属于过定位。
5. (×)一个自位支撑定位件与工件有几个接触点,就会限制工件几个自由度。
6. (×)一个支承板限制2个自由度,同一平面上平行布置的两个支承板限制4个自由度。
7.(×)在夹具设计中,不完全定位是绝对不允许的。
8. (×)机械加工中如果工件是固定不动的,就说明工件肯定被限制了6个自由度。
9. (√)在夹具组成中,某个元件既可能是定位元件,也可能是夹紧元件。
1. 分析下图所示定位方式,并回答以下问题:(1)各定位元件所限制的自由度;(2)判断有无欠定位或过定位存在,为什么?(图中双点划线为工件)在图示定位方案中下面的平面限制Z方向的移动和绕X及Y轴的转动3个自由度;左V形块我们认为是短V形块限制X及Y方向的移动2个自由度;在左V形块已经存在的前提下,右V形块限制工件Y方向的移动和绕Z轴的转动2个自由度。
右V形块为什么不限制2个移动呢?仔细想一下我们刚才叙述的工件放置过程应该可以明白。
Y方向的移动自由度被2个固定V形块重复限制,可能出现工件(每个被加工的工件不可能完全一样)松动或装不进夹具的现象,属于过定位。
1.计算车外圆的切削速度时,应按照待加工表面直径和已加工表面直径的平均值来计算。
(×)2.刀具的前角越大,切削越轻快,产生热量少,所以切削温度较低。
(√)3.用中等速度切削脆性材料时容易产生积屑留。
(×)4.车削细长轴类零件外圆时,最好采用主偏角为90°的车刀。
(√)5.刀具的主偏角和副偏角选得适当小些,可以减小表面粗糙度。
(√)6.刀具后角的大小,可以根据加工情况不同而有所选择,可大些,可小些,也可为负值。
( × ) 7.高速钢的工艺性比硬质合金好,所以用于制造各种复杂刀具。
(√)8.硬质合金的硬度和耐磨性比高速钢好,所以在相同条件下,它的前角比高速钢刀具选得大些。
(×)切屑的种类是由工件的材料决定的,无法改变。
(×)10.节状切屑的形成过程是最典型的切屑过程,形成的表面质量也最好。
( × )11.切削温度是指刀尖处的最高温度。
(×)12.因为硬质合金刀具的耐高温性能好,所以用它切削时一般不用切削液。
( √ )13.刀具刃磨后,用于各刀面微观不平及刃磨后具有新的表面层组织,所以当开始切削时,初期磨损最为缓慢。
(×)工件材料的切削加工性是以标准切削速度下,刀具使用寿命的大小作为比较标准的。
(×)当刀具安装高于工件回转中心时,实际工作角度会使前角增大,后角减小。
( √ )1.用六个支承点就可使工件实现完全定位。
( √ )2.工件夹紧变形会使被加工工件产生形状误差。
( × )3.专用夹具是专为某一种工件的某道工序的加工而设计制造的夹具。
( √ ) P171 4.随行夹具一般是用于自动线上的一种夹具。
( √ )5.斜楔夹紧的自锁条件是:斜角应小于两接触面摩擦角之和。
( √ )6.车床夹具应保证工件的定位基准与机床的主轴回转中心线保持严格的位置关系。
( √ )7.机床、夹具、刀具三者就可以构成完整的工艺系统。
2010级《机床夹具设计原理》期末复习题一、填空题:1.工件六个自由度完全限制称为完全定位,按加工要求应限制的自由度没有被限制的定位称为欠定位,夹具上的两个或两个以上的定位元件重复约束同一个自由度的现象,称为过定位。
2.夹紧机构被称为基本夹紧机构的有 斜楔夹紧机构、螺旋夹紧机构和偏心轮夹紧机构。
3.工件在夹具中造成定位误差的原因为基准位移误差和基准不重合误差两种。
4.工件的装夹指的是工件的 定位 和 夹紧。
5.斜楔自锁条件是:21Φ+Φ<α 手动夹紧机构一般取α=6度~8度。
6.夹紧装置主要由动力源装置、传力机构、夹紧元件 三部分组成。
7.按夹具的使用特点分类有通用夹具、专用夹具、可调夹具、组合夹具、拼装夹具。
8.夹具按使用机床不同可分为车床夹具、铣床夹具、钻床夹具、镗床夹具、齿轮机床夹具、数控机床夹具、自动机床夹具自动线随行夹具以及其他机床夹具等。
9.轴类零件一般采用中心孔作为定位基面。
10.采用布置恰当的六个支承点限制工件六个自由度的法则,称为六点定则。
11.短圆柱销可限制 2个自由度。
长圆柱销可限制 4 个自由度。
菱形销可限制1个自由度。
圆锥销一般只能限止3个自由度。
窄V 形块限止2个自由度。
长V 形块限制 4个自由度。
12.工件的某个自由度被重复限制称过定位(重复定位)。
13.工件的实际定位点数,如不能满足加工要求,少于应有的定位点数,称为欠定位。
这在加工中是不允许的。
14. 机床夹具由定位装置、夹紧装置、对刀或导向装置、连接元件、夹具体和其它装置或元件组成。
15.主要支承用来限制工件的自由度。
辅助支承用来提高工件的装夹刚度和稳定性,不起定位作用。
16.工件的六个自由度被完全限制的定位称完全定位。
17.造成定位误差的原因有基准位移、基准不重合。
18.机床夹具最基本的组成部分是_定位_元件、夹紧装置和夹具体。
19.设计夹具夹紧机构时,必须首先合理确定夹紧力的三要素:大小、方向和作用点。
第五章课后题1.机床夹具通常由哪些部分组成?各组成部分的功能如何?(1)定位元件和定位装置:确定工件在夹具中的位置(2)夹紧装置:保持工件在夹具中的既定位置(3)对刀-导向元件:确定刀具在加工前正确位置(4)连接元件:确定夹具在机床上的位置(5)夹具体:夹具的基础件(6)其他装置:分度装置、吊装元件等2.什么是装夹?装夹有哪三种方式?哪种装夹方式适用于大批量生产?工件的定位和夹紧的过程称为装夹。
(1)直接找正装夹(2)划线找正装夹(3)夹具装夹:适应于大批量生产3.什么是定位基准?什么是六点定位原理?在加工中用作定位的基准。
(在第四章中介绍)任何工件都具有六个自由度,这六个自由度需要用夹具按一定规则布置的六个定位支承点来限制,每个定位点相应地限制工件一个自由度,可以实现工件的六点定位。
4.试举例说明什么叫工件在夹具中的完全定位、不完全定位、欠定位和过定位?哪些是允许使用的,哪些是有条件使用的,哪些是绝对不允许使用的?完全定位:工件的六个自由度全部被限制不完全定位:根据加工需求,不必完全限制六个自由度的定位欠定位:实际限制的自由度少于按加工要求的自由度数。
这是不允许使用的过定位:支承点数多于所限制的自由度数,有条件使用。
5.固定支承有哪几种形式?各适用于什么场合?固定支承是一经安装到夹具上后,高度方向和尺寸是固定不变的。
固定支承有支承钉和支承板。
支承钉:以粗基准定位时,因定位基准面粗糙不平,必须用较远的三个定位支承点。
精基准定位有时也应以支承钉来定位。
支承板:大中型工件,以及经过精加工的平面定位。
6.什么是自位支承、可调支承和辅助支承?三者的特点和区别何在?使用辅助支撑和可调支撑时应注意什么?可调支承:顶端位置能在一定范围内调整,定位作用相当于固定支承。
自位支承(浮动支承):支承点的位置能够随工件定位基准面的变化自动与之适应。
辅助支承:辅助支承只在基本支承对工件定位后才参与支承,不允许辅助支承破坏基本支承的定位作用。