现代控制理论 状态反馈与状态观测器
- 格式:ppt
- 大小:205.50 KB
- 文档页数:38

现代控制实验状态反馈器和状态观测器的设计现代控制实验中,状态反馈器和状态观测器是设计系统的重要组成部分。
状态反馈器通过测量系统的状态变量,并利用反馈回路将状态变量与控制输入进行耦合,以优化系统的性能指标。
状态观测器则根据系统的输出信息,估计系统的状态变量,以便实时监测系统状态。
本文将分别介绍状态反馈器和状态观测器的设计原理和方法。
一、状态反馈器的设计:状态反馈器的设计目标是通过调整反馈增益矩阵,使得系统的状态变量在给定的性能要求下,达到所需的一组期望值。
其设计步骤如下:1.系统建模:通过对被控对象进行数学建模,得到描述系统动态行为的状态空间表达式。
通常表示为:ẋ=Ax+Buy=Cx+Du其中,x为系统状态向量,u为控制输入向量,y为系统输出向量,A、B、C、D为系统的状态矩阵。
2.控制器设计:根据系统的动态性能要求,选择一个适当的闭环极点位置,并计算出一个合适的增益矩阵。
常用的设计方法有极点配置法、最优控制法等。
3.状态反馈器设计:根据控制器设计得到的增益矩阵,利用反馈回路将状态变量与控制输入进行耦合。
状态反馈器的输出为:u=-Kx其中,K为状态反馈增益矩阵。
4.性能评估与调整:通过仿真或实验,评估系统的性能表现,并根据需要对状态反馈器的增益矩阵进行调整。
二、状态观测器的设计:状态观测器的设计目标是根据系统的输出信息,通过一个状态估计器,实时估计系统的状态变量。
其设计步骤如下:1.系统建模:同样地,对被控对象进行数学建模,得到描述系统动态行为的状态空间表达式。
2.观测器设计:根据系统的动态性能要求,选择一个合适的观测器极点位置,以及一个合适的观测器增益矩阵。
常用的设计方法有极点配置法、最优观测器法等。
3.状态估计:根据观测器设计得到的增益矩阵,通过观测器估计系统的状态变量。
状态观测器的输出为:x^=L(y-Cx^)其中,L为观测器增益矩阵,x^为状态估计向量。
4.性能评估与调整:通过仿真或实验,评估系统的状态估计精度,并根据需要对观测器的增益矩阵进行调整。
本科实验报告课程名称: 现代控制理论实验项目: 状态反馈与状态观测器得设计实验地点: 中区机房专业班级:自动化学号:学生姓名:指导教师:年月日现代控制理论基础一、实验目得(1)熟悉与掌握极点配置得原理。
(2)熟悉与掌握观测器设计得原理。
(3)通过实验验证理论得正确性。
(4)分析仿真结果与理论计算得结果。
二、实验要求(1)根据所给被控系统与性能指标要求设计状态反馈阵K。
(2)根据所给被控系统与性能指标要求设计状态观测器阵L。
(3)在计算机上进行分布仿真。
(4)如果结果不能满足要求,分析原因并重复上述步骤。
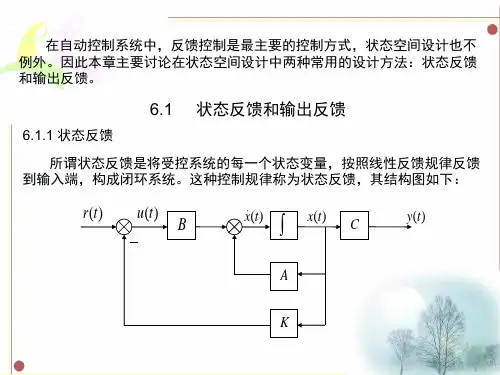
三、实验内容(一)、状态反馈状态反馈就是将系统得状态变量乘以相应得反馈系数,然后反馈到输入端与参考输入叠加形成控制作为受控系统得控制输入,采用状态反馈不但可以实现闭环系统得极点任意配置,而且也就是实现解耦与构成线性最优调节器得主要手段。
1、全部极点配置给定控制系统得状态空间模型,则经常希望引入某种控制器,使得该系统得闭环极点移动到某个指定位置,因为在很多情况下系统得极点位置会决定系统得动态性能。
假设系统得状态空间表达式为(1)其中引入状态反馈,使进入该系统得信号为(2)式中r为系统得外部参考输入,K为矩阵、可得状态反馈闭环系统得状态空间表达式为(3)可以证明,若给定系统就是完全能控得,则可以通过状态反馈实现系统得闭环极点进行任意配置。
假定单变量系统得n个希望极点为λ1,λ2,…λn, 则可以求出期望得闭环特征方程为(sλ1)(sλ2)…(sλn)=这就是状态反馈阵K可根据下式求得K= (4)式中,就是将系统期望得闭环特征方程式中得s换成系统矩阵A后得矩阵多项式。
例1已知系统得状态方程为采用状态反馈,将系统得极点配置到1,2,3,求状态反馈阵K、、其实,在MATLAB得控制系统工具箱中就提供了单变量系统极点配置函数acker,该函数得调用格式为K=acker(A,b,p)式中,p为给定得极点,K为状态反馈阵。
《现代控制理论》线性定常系统的反馈结构及状态观测器现代控制理论中,线性定常系统的反馈结构及状态观测器是控制系统中的关键部分。
反馈结构和状态观测器的设计对于控制系统的性能和稳定性有着重要的影响。
本文将从反馈结构和状态观测器的定义、功能和设计方法等方面进行详细介绍。
首先,我们来介绍反馈结构。
反馈结构是控制系统中最常见的一种控制方式,通过将系统的输出信号与期望值进行比较,计算出控制量,并作为输入信号对系统进行控制,以实现对系统输出的调节。
在线性定常系统中,反馈结构一般由比例控制器、积分控制器和微分控制器组成,通过调节这些控制器的参数,可以实现对系统性能的优化。
其中,比例控制器用于调节系统的过渡过程,积分控制器用于消除系统的稳态误差,微分控制器用于抑制系统的振荡和提高系统的动态响应速度。
通过适当选择和调节这些控制器的参数,可以使系统的性能指标如超调量、响应时间等得到满足。
接下来我们来介绍状态观测器。
状态观测器是用于估计和反馈系统状态的一种装置,通过测量系统的输出信号和输入信号,以及系统的数学模型,来估计系统的状态。
状态观测器在控制系统中起到了关键的作用,可以实现对系统状态的估计和补偿,从而提高系统的稳定性和性能。
在线性定常系统中,状态观测器一般由状态估计器和状态补偿器组成。
状态估计器根据系统的输出信号和输入信号,以及系统的数学模型,通过运算得到系统的状态估计值,以反馈给系统进行控制。
状态补偿器则根据系统的状态估计值和期望值,以及系统的数学模型,通过运算得到控制量,以控制系统的输出。
关于反馈结构和状态观测器的设计方法,一般可以采用经典控制理论方法和现代控制理论方法。
经典控制理论方法主要包括根轨迹法、频率响应法等。
根轨迹法可以通过绘制系统的根轨迹图来分析系统的稳定性和性能,并通过调节控制器参数来满足系统的性能指标。
频率响应法则通过分析系统的频率特性来设计合适的频率补偿器,以达到系统的优化。
现代控制理论方法则主要包括状态空间法和最优控制方法。
现代控制理论状态反馈和状态观测器的设计实验报告本次实验是关于现代控制理论中状态反馈与状态观测器的设计与实现。
本次实验采用MATLAB进行模拟与仿真,并通过实验数据进行验证。
一、实验目的1、学习状态反馈控制的概念、设计方法及其在实际工程中的应用。
3、掌握MATLAB软件的使用方法。
二、实验原理1、状态反馈控制状态反馈控制是指将系统状态作为反馈控制的输出,通过对状态反馈控制器参数的设计,使系统的状态响应满足一定的性能指标。
状态反馈控制的设计步骤如下:(1) 确定系统的状态方程,即确定系统的状态矢量、状态方程矩阵和输出矩阵;(2) 设计状态反馈控制器的反馈矩阵,即确定反馈增益矩阵K;(3) 检验状态反馈控制器性能是否满足要求。
2、状态观测器(1) 确定系统的状态方程;(2) 设计观测器的状态估计矩阵和输出矩阵;(3) 检验观测器的状态估计精度是否符合标准。
三、实验内容将简谐信号加入单个质点振动系统,并对状态反馈控制器和状态观测器进行设计与实现。
具体实验步骤如下:1、建立系统状态方程:(1)根据系统的物理特性可得单自由度振动系统的运动方程为:m¨+kx=0(2)考虑到系统存在误差、干扰等因素,引入干扰项,得到系统状态方程:(3)得到系统状态方程为:(1)观察系统状态方程,可以发现系统状态量只存在于 m 行 m 到 m 行 n 之间,而控制量只存在于 m 行 1 到 m 行 n 之间,满足可控性条件。
(2)本次实验并未给出状态变量的全部信息,只给出了系统的一维输出,因此需要设计状态反馈器。
(3)我们采用极点配置法进行状态反馈器设计。
采用 MATLAB 工具箱函数,计算出极点:(4) 根据极点求解反馈矩阵,得到状态反馈增益矩阵K:(1)通过矩阵计算得到系统的可观性矩阵:(2)由若干个实测输出建立观测器,可将观测器矩阵与可观测性矩阵组合成 Hankel 矩阵,求解出状态观测器系数矩阵:(3)根据系统的状态方程和输出方程,设计观测方程和状态估计方程,如下:4、调试控制器和观测器(1)经过上述设计步骤,将反馈矩阵和观测矩阵带入 MATLAB 工具箱函数进行仿真。
状态反馈与状态观测器一、 实验目的1. 研究现代控制理论中用状态反馈配置极点的方法。
2. 研究状态观测器的设计方法。
二、 实验内容1. 被控对象模拟电路图如下:2. 系统数学模型:(1)被控对象传递函数为:2()100()() 2.928103.57Y s Gp s U s s s ==++ (2)被控对象状态方程 xA xB u =+ YC x = 式中1103.57 3.928A ⎡⎤=⎢⎥--⎣⎦01B ⎡⎤=⎢⎥⎣⎦[]1000C =(3)图中AT G e =()TH t dtB ϕ=⎰其中()At t e ϕ=K ——1*2维状态反馈系统矩阵,由计算机推出 L ——2*1维观测器的反馈矩阵,有计算机推出Kr ——为使y(t)跟踪r(t)乘的比例系数,由计算机自动递推算出(4)希望的系统极点(参考值):1,27.357.5S j =-± 它对应在Z 平面上应为:1,20.7120.22Z j =± (5)观测点极点参考值:1,20.10Z j =±三、 实验结果分析: 1. 无状态反馈系统输入输出响应如图所示:输入 阶跃信号 Ui=3V输出 百分超调量 PO = 100*(4.23-2.89)/2.89 = 46 稳态误差 e ss (t) = (3-2.89)/3 = 3.67% 上升时间 Tr = 190 ms 峰值时间 Ts = 340 ms 使用 Matlab 仿真,输入:a=[0 1;-103.57 -3.928];b=[0 1]';c=[100 0];d=0; step(a,b,c,d,1,t) 得到输出曲线:如图所示:百分超调量PO = 53.3 稳态误差 ess(t) = 3.4% 上升时间 Tr = 178 ms 峰值时间 Ts = 300 ms与实验结果基本相符。
2. 有状态反馈Step ResponseTime (sec)A m p l i t u d e0123456789100.511.5系统极点和观测器极点均根据参考值设置,其中系统极点:1,27.357.5S j =-±,对应Z 平面:1,20.7120.22Z j =± 观测器极点:1,20.10Z j =±所得输入输出波形如图:输入阶跃信号Ui=2V输出百分超调量PO = 100*(2.09-2)/2 = 4.5 稳态误差e ss(t) = 0 峰值时间Ts = 328 ms通过Matlab 计算系统状态反馈矩阵和观测器反馈矩阵并仿真:1.判断系统能控性、能观性:a=[0 1;-103.57 -3.928];b=[0 1]';c=[100 0];d=0;ro=rank(obsv(a,c))rc=rank(ctrb(a,b))得:ro = 2 rc = 2,所以系统既能控又能观2.计算开环特征值:eol=eig(a)得:eol =-1.9640 + 9.9856i-1.9640 - 9.9856i3.配置观测器极点,计算观测器反馈增益:dpo=[-57.56+0*i -57.56-0*i];k=acker(a',c',dpo)得:k =1.1119 27.72824.配置期望闭环极点,计算系统状态反馈:dpp=[-7.35+7.5*i -7.35-7.5*i];g=acker(a,b,dpp)得:g =6.7025 10.77205.仿真:t=[0:0.05:10.0];step(a,b,c,d,1,t)hold onacl=[a-b*g b*g;[0 0;0 0] a-k'*c]bcl=[b;0;0];ccl=[c 0 0];dcl=d;step(acl,bcl,ccl,dcl,1,t)hold off所得波形如图:如图所示,蓝色波形为未加状态反馈的系统,其仿真波形上文已经分析过:百分超调量PO = 53.3 峰值时间 Tp = 300 ms 2%调节时间 Ts=1950ms 绿色为加了观测器的系统: 百分超调量PO = 4.5 峰值时间 Ts =400 ms 2%调节时间 Ts=570ms 与实验所得数据基本相符,由于仿真时输入没有乘Kr ,故不做稳态误差的比较。