• 设计方法见书。
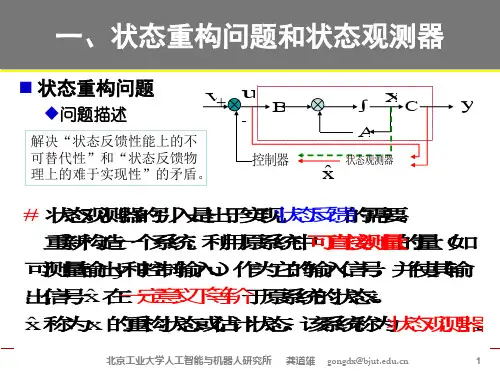
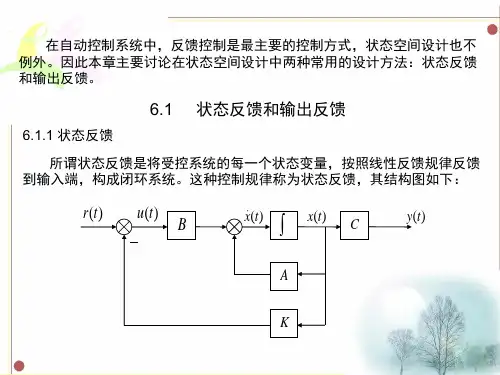
五、带观测器的状态反馈系统 • 在状态反馈中,不采样原系统的状态进行反 馈而采用状态观测器估计的状态进行反馈, 其结构图如下图所示.
• 状态估计器
x ( A GC ) x Bu Gy ˆ ˆ ˆ y Cx
• 原系统
x Ax Bu ˆ x Ax Bkx Bv y Cx ˆ x ( A Bk ) x Bk ( x x) Bv u v kx ˆ
• 传函不变,即
y C (sI A Bk ) B.v
1
• 显然系统的特性由矩阵的特征多项式
ˆ A Bk A 0 A GC Bk
决定.
• 由
ˆ det[ I A] det( I A Bk ) det( A GC ) 0
• 注意上述方法仅适用于SISO系统.
4.几点说明
(1).对SISO系统来说,状态反馈只改变极点位 臵,不影响零点. (2).由于改变了极点,因此可能出现零极点对 消,从而影响系统的可观性.
(3).从实现的角度,状态反馈比输出反馈 困难,复杂. (4)对SISO系统来说,极点配臵只改变了极 点在S平面上的位臵,显然不采用这种方法 难于达到系统动静性能的一致. (5).对MIMO来说,极点配臵的方法与SISO 方法是一致的,但SISO的k阵是唯一的,而 MIMO的k阵是非唯一的.
• 系统的状态估计器极点可任意配臵的充要 条件是:该系统的状态是可观的.
(3).状态估计器的设计方法. • 仿照状态反馈的极点配臵设计方法,只需先 进行可控性检验,改成可观性检查即可,其余 步骤相同.
四、降维观测器设计
• 一般情况下观测器是建立在对原系统模拟基 础上的,因而其维数和受控系统维数是相同 的,称为全维观测器(或估计器)。