平面四杆机构的运动仿真模型分析
- 格式:doc
- 大小:205.50 KB
- 文档页数:7
基于matlab的四杆机构运动分析一、四杆机构基本概念四杆机构是一种通过变换连杆长度,改变机构运动形态的机械系统。
四杆机构通常由固定连杆、推动连杆、连接杆和工作连杆四个连杆组成,其中固定连杆和推动连杆固定不动,连接杆和工作连杆则沿固定轴线的方向做平动或旋转运动。
四杆机构的基本构造如下图所示:四杆机构的四个连杆的长度和构造参数,以及驱动机构的运动决定了机构的运动特性。
在进行四杆机构运动分析时,需要通过求解运动学关系式和动力学方程,得到连杆的运动规律和力学特性。
二、四杆机构运动学分析1.运动学基本方程四杆机构的运动学分析基本方程是连杆长度变化的定理,即:l₁²+l₂²-2l₁l₂cosθ₂=l₃²+l₄²-2l₃l₄cosθ₄其中,l₁,l₂分别为固定连杆和推动连杆长度;l₃,l₄分别为连接杆和工作连杆长度;θ₂,θ₄分别为推动连杆和工作连杆的夹角。
2.运动学求解方法根据四杆机构运动学基本方程,可以求解机构中任意连杆的角度和位置,从而分析机构运动规律。
在matlab程序中,运动分析可以采用分析法或图解法。
分析法通常采用向量法或坐标法,即将四杆机构中各连杆和运动副的运动量表示为向量或坐标,然后根据连杆长度变化的定理,求解四个未知角度θ₁、θ₂、θ₃、θ₄。
图解法则先通过画图确定机构的运动规律,在图上求解连杆的角度。
比如可以采用伯格(Bourgeois)图法或恰普利恩(Chaplygin)图法等。
四杆机构动力学分析基本方程包括平衡方程和力平衡方程。
平衡方程:当四杆机构处于平衡状态时,连杆的受力关系可以表示为:ΣF=0其中ΣF为各连杆受力的合力。
ΣF=m×a其中,m为每个连杆的质量,a为连杆的加速度。
四杆机构动力学求解方法以matlab为工具,可借助matlab的求解器完成求解。
具体可以利用matlab的优化工具箱、控制工具箱和系统动态学工具箱等,来实现机构模型的动态模拟、仿真和优化设计。
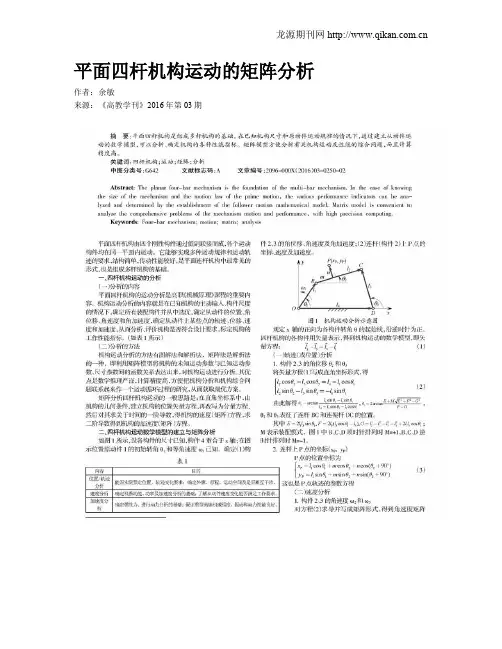
平面四杆机构运动的矩阵分析作者:余敏来源:《高教学刊》2016年第03期摘要:平面四杆机构是组成多杆机构的基础。
在已知机构尺寸和原动件运动规律的情况下,通过建立从动件运动的数学模型,可以分析、确定机构的各种性能指标。
矩阵模型方便分析有关机构运动及性能的综合问题,而且计算精度高。
关键词:四杆机构;运动;矩阵;分析中图分类号:G642 文献标志码:A 文章编号:2096-000X(2016)03-0250-02Abstract: The planar four-bar mechanism is the foundation of the multi-bar mechanism. In the case of knowing the size of the mechanism and the motion law of the prime motion, the various performance indicators can be analyzed and determined by the establishment of the follower motion mathematical model. Matrix model is convenient to analyze the comprehensive problems of the mechanism motion and performance, with high precision computing.Keywords: Four-bar mechanism; motion; matrix; analysis平面四桿机构由四个刚性构件通过低副联接而成,各个运动构件均在同一平面内运动。
它能够实现多种运动规律和运动轨迹的要求,结构简单,传动性能较好,是平面连杆机构中最常见的形式,也是组成多杆机构的基础。
一、四杆机构运动的分析(一)分析的内容平面四杆机构的运动分析是高职《机械原理》课程的重要内容。
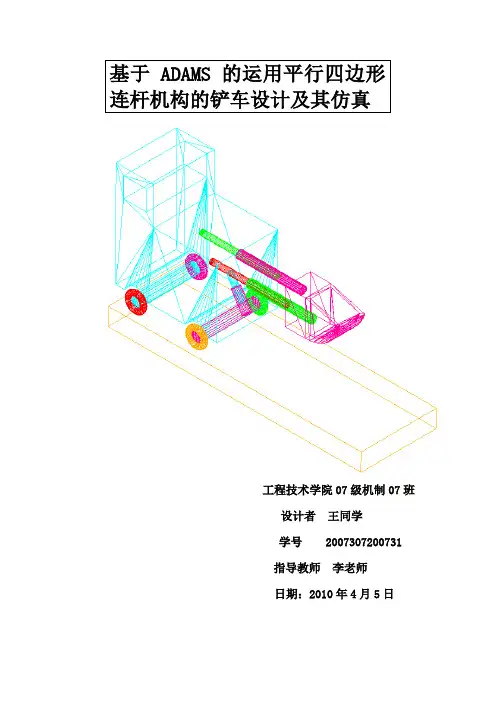
工程技术学院07级机制07班设计者王同学学号 2007307200731 指导教师李老师日期:2010年4月5日基于ADAMS的运用平行四边形连杆机构的铲车设计及其运动仿真一、设计原理由机械原理可以知道在平面四杆机构中当两根连架杆长度一样时,连杆在运动过程中会在任意时刻做瞬时平动,刚体瞬心位于无穷远处,连杆不会绕着自身旋转即角速度为0。
正是基于这一原理,在铲车设计中,把两根驱动铲斗的斗杆液压缸的长度设计相等并作为连架杆,让铲斗作为连杆,以车身为机架,这样铲斗在上升的过程中不会发生旋转,这样铲斗内的货物不会掉出来。
二、设计分析铲车的工作主要是靠驱动铲斗的2根液压斗杆油缸和驱动斗杆油缸的1根动臂油缸来完成,铲车工作一次主要包括以下8个过程:1.铲车运动到指定工作位置;2.动臂油缸工作使得铲斗到达货物堆放位置;3.驱动铲斗的2根斗杆油缸工作使得铲斗装上货物;4.动臂油缸工作使得铲斗上升;5.铲车到达卸货的位置;6.2根斗杆油缸协调工作使得铲斗翻转卸掉货物;7.动臂油缸和斗杆油缸协调工作使得铲斗快速恢复到水平位置(未工作时的位置);8.铲车返回,开始下一次铲运工作。
可以看出铲车要完成一次卸运工作3根油缸的协调工作非常重要,因此要靠一定的函数设计的驱动来驱动油缸完成工作。
在此认为油缸的行程是线性变化的,而考虑到ADAMS中的STEP函数可以实现此功能,为此本次设计中运用STEP函数,分别对3根液压油缸编写STEP函数已达到所需功能。
本次仿真主要是对3根油缸和铲斗运动的仿真,对于车体及其尺寸和挖掘动作及其过程中的受力分析和振动未做详尽设计和分析。
三、建立构件模型铲车有车身、斗杆油缸、动臂油缸和铲斗组成,模型中还有路面,依次建模。
1.创建车厢(1)启动ADAMS/View,选择新建模型,命名为forklift,并将系统的长度单位设置为m。
(2)设置工作栅格。
单击菜单【Settings】→【Working Gird】后,在弹出的设置工作栅格对话框中,将Size设置为X(5.5),Y(4),Spacing设置为X(0.1),Y(0.1)。
栏杆机四杆机构运动学分析1 四杆机构运动学分析1.1 机构运动分析的任务、目的和方法曲柄摇杆机构是平面连杆机构中最基本的由转动副组成的四杆机构,它可以用来实现转动和摆动之间运动形式的转换或传递动力。
对四杆机构进行运动分析的意义是:在机构尺寸参数已知的情况下,假定主动件(曲柄)做匀速转动,撇开力的作用,仅从运动几何关系上分析从动件(连杆、摇杆)的角位移、角速度、角加速度等运动参数的变化情况。
还可以根据机构闭环矢量方程计算从动件的位移偏差。
上述这些内容,无论是设计新的机械,还是为了了解现有机械的运动性能,都是十分必要的,而且它还是研究机械运动性能和动力性能提供必要的依据。
机构运动分析的方法很多,主要有图解法和解析法。
当需要简捷直观地了解机构的某个或某几个位置的运动特性时,采用图解法比较方便,而且精度也能满足实际问题的要求。
而当需要精确地知道或要了解机构在整个运动循环过程中的运动特性时,采用解析法并借助计算机,不仅可获得很高的计算精度及一系列位置的分析结果,并能绘制机构相应的运动线图,同时还可以把机构分析和机构综合问题联系起来,以便于机构的优化设计。
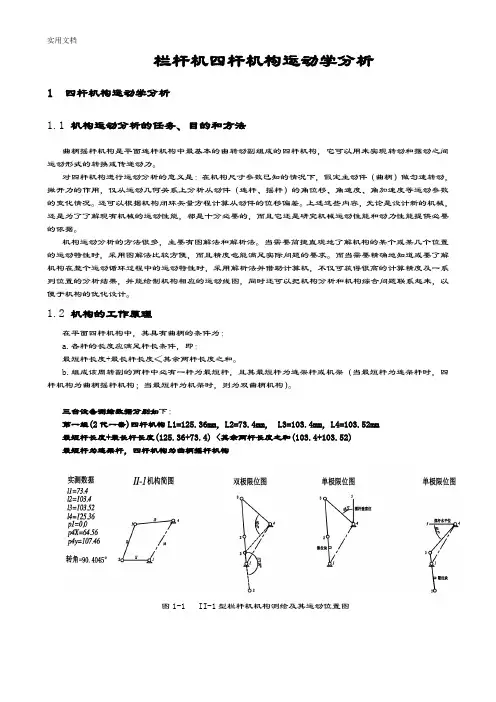
1.2 机构的工作原理在平面四杆机构中,其具有曲柄的条件为:a.各杆的长度应满足杆长条件,即:最短杆长度+最长杆长度≤其余两杆长度之和。
b.组成该周转副的两杆中必有一杆为最短杆,且其最短杆为连架杆或机架(当最短杆为连架杆时,四杆机构为曲柄摇杆机构;当最短杆为机架时,则为双曲柄机构)。
三台设备测绘数据分别如下:第一组(2代一套)四杆机构L1=125.36mm,L2=73.4mm, L3=103.4mm,L4=103.52mm最短杆长度+最长杆长度(125.36+73.4) <其余两杆长度之和(103.4+103.52)最短杆为连架杆,四杆机构为曲柄摇杆机构图1-1 II-1型栏杆机机构测绘及其运动位置图第二组(2代二套)四杆机构L1=125.36mm,L2=50.1mm,L3=109.8mm,L4=72.85mm最短杆长度+最长杆长度(125.36+50.1) <其余两杆长度之和(109.8+72.85)最短杆为连架杆,四杆机构为曲柄摇杆机构图1-2 II-2型栏杆机机构测绘及其运动位置图第三组(3代)四杆机构L1=163.2mm,L2=64.25mm,L3=150mm,L4=90.1mm最短杆长度+最长杆长度(163.2+64.25) <其余两杆长度之和(150+90.1)最短杆为连架杆,四杆机构为曲柄摇杆机构图1-3 III型栏杆机机构测绘及其运动位置图在如下图1所示的曲柄摇杆机构中,构件AB为曲柄,则B点应能通过曲柄与连杆两次共线的位置。
1 绪论1.1 课题背景平面连杆机构在重型机械、纺织机械、食品机械、包装机械、农业机械中都有广泛的应用。
但是要在尽可能短的时间内设计出一个满足多种性能要求的机构却不是一件很容易的事情。
过去人们已建立了一些四杆机构的设计方法,然而这些方法与工程设计的要求还有一段距离,常常花费很多时间却只得到一个不可行的设计方案。
因为机构的运动性能如急回特性K,压力角α,从动件的摆角Ψ,极位夹角θ与构件尺寸有关,本身的这些运动性能之间也都相互影响,比如,四杆机构中,从动件急回特性K完全取决于极位夹角θ的作用。
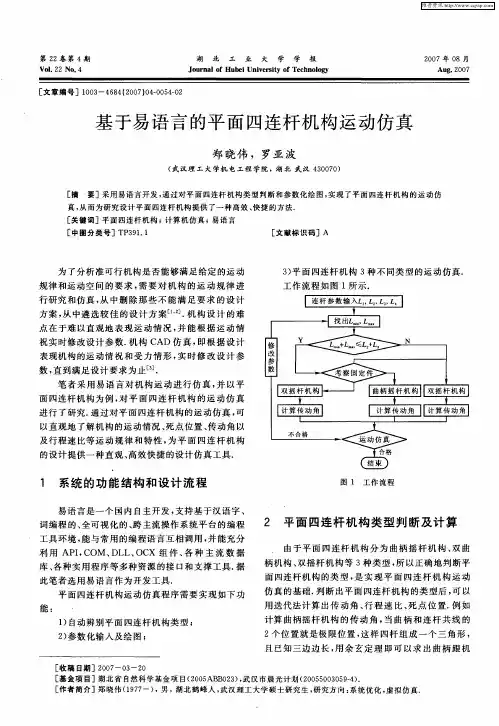
本篇论文主要研究工程中应用比较多的Ⅰ、Ⅱ曲柄摇杆机构的传动角γ,极位夹角θ与机构尺寸之间的关系,然后运用工程分析软件ADAMS针对机构进行运动学分析,从而能给出设计平面四杆机构时为保证有较好的特性时,选取构件尺寸的建议。
进而为工程应用提供依据。
1.2 平面四杆机构的基本型式平面四杆机构可分为铰链四杆机构和含有移动副的四杆机构。
其中只有转动副的平面四杆机构称为铰链四杆机构[1]。
在铰链四杆机构中,能作整周回转的称为曲柄,只能在一定角度范围内摆动的称为摇杆。
由于曲柄和摇杆长度的不同,又可以将铰链四杆机构分为曲柄摇杆机构、双曲柄机构和双摇杆机构[2]。
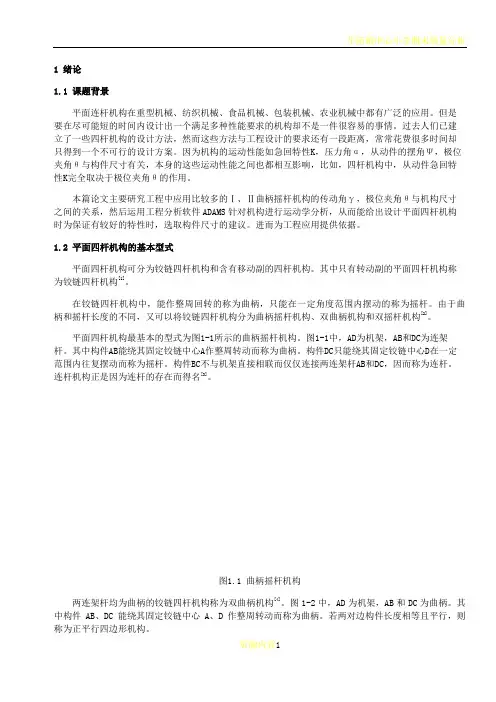
平面四杆机构最基本的型式为图1-1所示的曲柄摇杆机构。
图1-1中,AD为机架,AB和DC为连架杆。
其中构件AB能绕其固定铰链中心A作整周转动而称为曲柄。
构件DC只能绕其固定铰链中心D在一定范围内往复摆动而称为摇杆。
构件BC不与机架直接相联而仅仅连接两连架杆AB和DC,因而称为连杆。
连杆机构正是因为连杆的存在而得名[3]。
图1.1 曲柄摇杆机构两连架杆均为曲柄的铰链四杆机构称为双曲柄机构[4]。
图1-2中,AD为机架,AB和DC为曲柄。
其中构件AB、DC能绕其固定铰链中心A、D作整周转动而称为曲柄。
若两对边构件长度相等且平行,则称为正平行四边形机构。
图1.2 双曲柄机构两连架杆均为摇杆的铰链四杆机构称为双摇杆机构[5]。
实验二平面连杆机构设计分析及运动分析综合实验一、实验目的:1、掌握机构运动参数测试的原理和方法。
了解利用测试结果,重新调整、设计机构的原理。
2、体验机构的结构参数及几何参数对机构运动性能的影响,进一步了解机构运动学和机构的真实运动规律。
3、熟悉计算机多媒体的交互式设计方法,实验台操作及虚拟仿真。
独立自主地进行实验内容的选择,学会综合分析能力及独立解决工程实际问题的能力,了解现代实验设备和现代测试手段。
二、实验内容1、曲柄滑块机构及曲柄摇杆机构类型的选取。
2、机构设计,既各杆长度的选取。
(包括数据的填写和调整好与“填写的数据”相对应的试验台上的杆机构的各杆长度。
)3、动分析(包括动态仿真和实际测试)。
4、分析动态仿真和实测的结果,重新调整数据最后完成设计。
三、实验设备:平面机构动态分析和设计分析综合实验台,包括:曲柄滑块机构实验台、曲柄摇杆机构实验台,测试控制箱,配套的测试分析及运动仿真软件,计算机。
四、实验原理和内容:1、曲柄摇杆机构综合试验台①曲柄摇杆机构动态参数测试分析:该机构活动构件杆长可调、平衡质量及位置可调。
该机构的动态参数测试包括:用角速度传感器采集曲柄及摇杆的运动参数,用加速度传感器采集整机振动参数,并通过A/D板进行数据处理和传输,最后输入计算机绘制各实测动态参数曲线。
可清楚地了解该机构的结构参数及几何参数对机构运动及动力性能的影响。
②曲柄摇杆机构真实运动仿真分析:本试验台配置的计算机软件,通过建模可对该机构进行运动模拟,对曲柄摇杆及整机进行运动仿真,并做出相应的动态参数曲线,可与实测曲线进行比较分析,同时得出速度波动调节的飞轮转动惯量及平衡质量,从而使学生对机械运动学和动力学,机构真实运动规律,速度波动调节有一个完整的认识。
③曲柄摇杆机构的设计分析:本试验台配置的计算机软件,还可用三种不同的设计方法,根据基本要求,设计符合预定运动性能和动力性能要求的曲柄摇杆机构。
另外还提供了连杆运动轨迹仿真,可做出不同杆长,连杆上不同点的运动轨迹,为平面连杆机构按运动轨迹设计提供了方便快捷的虚拟实验方法。
平面四杆机构三维动画和运动仿真教学软件[摘要]通过建立平面机构模型照片库和对应的三维装配体及运动动画库,与机构运动仿真软件组合,构成机械原理教学软件,有效利用计算机多媒体技术,适应学生为主的独立学习模式,提高机构学教学效果,软件还具有机构运动学参数分析功能,有助于进行平面连杆机构的设计。
[关键词]平面机构三维动画运动仿真教学软件一、前言平面机构组成和运动分析是机械原理课程重要的教学内容,但对于毫无工程实际体验、缺乏空间想象和工程概念的学生来说,理解和掌握课程的机构运动学教学内容有相当的困难,比如曲柄摇杆机构的急回现象、构件长度变化对机构运动特性的影响等,常规的教学手段很难演示。
随着计算机辅助教学的普及应用,通过教学软件在计算机上模拟机构运动,进行直观化教学,已经成为提高课程教学效果的有效途径。
平面四杆机构三维动画和运动模拟教学软件带有平面机构的三维动画库,包括实物模型,三维装配过程、机构运动仿真和机构运动简图,不但可以在课堂教学中提供大量机构直观素材,帮助学生理解机构学相关知识,提高教学效果,软件还具有行铰链四杆机构和和曲柄滑块机构的运动仿真功能和速度、速度分析的功能。
运动仿真的主要功能是通过输入不同的杆件长度,模拟机构的运动,对于铰链四杆机构,还可以实现机架转换的功能。
运动仿真在教学中,能非常好的解决铰链四杆机构类型判别实例的验证及急回作用的演示问题。
二、平面机构建模机构测绘是机械原理课程教学中常见的教学实验环节,由于时间和模型数量的限制,学生在实验中接触到的机构类型很有限,同时课程提供给学生接触模型的时间也很短。
教学软件将实物模型、三维动画,机构运动简图等教学内容组成计算机模拟实验室,提供近50种不同平面机构素材,不但可以作为良好的课堂教学实例,还可以以网络教学形式,提供学生课后独立学习使用。
以图1所示凸轮机构为例,通过测绘确定机构基本参数,在软件中创建机构三维模型,并完成装配,构成图2所示的三维模型。
平面四杆机构动力学分析平面四杆机构是一种常用的机构形式,它由四个连杆构成,每个连杆的两个端点分别与两个固定点和两个动点连接。
平面四杆机构广泛应用于工程和机械领域,如发动机连杆机构、机床传动机构等。
在对平面四杆机构进行动力学分析时,需要考虑连杆的运动学特性以及受力情况,以求得机构的运动学和动力学性能参数。
本文将介绍平面四杆机构动力学分析的基本方法和步骤。
首先,对平面四杆机构进行运动学分析,即确定连杆的几何参数和运动特性。
通过连杆的长度、角度和位置关系,可以建立连杆运动学方程。
平面四杆机构一般有两个输入连杆和两个输出连杆,输入连杆一般由驱动源(如电机)控制,输出连杆用于传递或产生所需的运动。
其次,根据连杆的几何关系和运动学方程,可以推导得到平面四杆机构的速度和加速度方程。
速度方程描述了各连杆的速度与输入连杆的关系,加速度方程描述了各连杆的加速度与输入连杆的关系。
通过求解速度和加速度方程,可以得到每个连杆的线速度和角速度,以及各连杆的线加速度和角加速度。
接下来,进行平面四杆机构的力学分析。
根据连杆的几何关系和受力分析,可以推导得到每个连杆的力学方程。
力学方程描述了各连杆受到的力和力矩与其他连杆的关系。
通过求解力学方程,可以得到每个连杆的受力和力矩大小以及方向,以及各连杆之间的力传递关系。
最后,根据连杆的运动学和力学特性,可以得到平面四杆机构的动力学性能参数,如位置、速度和加速度的关系、力和力矩的大小和方向等。
这些参数可以用于分析机构的运动和受力情况,并进一步优化设计。
需要注意的是,平面四杆机构的动力学分析是一个复杂的过程,需要考虑各连杆之间的相互作用和约束条件。
同时,还需要考虑连杆的质量和惯量等因素,以求得更精确的分析结果。
因此,在实际应用中,常采用计算机辅助分析方法,如数值模拟和仿真技术,以提高分析的准确性和效率。
综上所述,平面四杆机构的动力学分析是一项重要的工作,对于优化设计和性能评估具有重要意义。
液压支架四连杆机构的三维建模和运动仿真摘要:利用UG的建模模块(model)对液压支架四连杆机构进行快速整体建模,然后应用UG的运动仿真模块(animation)对支架升架、降架的运动过程进行模拟分析,同时利用标记点对顶梁端点的运动轨迹进行跟踪,来验证端点最大水平变动量是否满足设计要求。
关键词:液压支架;四连杆机构;三维建模;运动仿真0引言三维建模彻底改变了传统设计理念,使设计者头脑中产生的三维实体图形可以直接仿真到屏幕上,既形象又直观。
使设计人员从想象各种视图的困境中解放出来,对于复杂的模型更可避免传统设计方式难以避免的错误。
而在建造物理样机之前,通过建立的三维数字化模型进行运动仿真可以对运动特性及干涉情况进行检验,从而预知设计的机构是否满足要求。
本文以ZTA6500型液压支架为例,应用UG软件探索一种三维整体简化、快速建模和运动仿真的方法。
1UG软件简介Unigraphics(简称UG)是美UGS公司的拳头产品。
该软件不仅具有强大的实体模型、曲面造型、虚拟装配和产生工程图等设计功能,而且在设计过程中可以进行有限元分析、机构运动分析、动力学分析和仿真模拟,从而提高设计的可靠性。
同时可用建立的三维模型直接生成数控代码,用于产品的加工,其后处理程序支持多种类型数控机床。
另外它所提供的二次开发语言UG/open GRIP,UG/open API简单易学,实现功能多,便于用户开发专用CAD系统。
2液压支架及其四连杆机构液压支架的主要功能是支撑工作面顶板,阻止顶板冒落的岩石窜入作业空间,以保证工作面内机器和人员的安全生产。
由于其工作性质所致,较为关心的是端面距的尺寸,而梁端摆动幅度会对端面距的尺寸造成直接影响。
液压支架四连杆机构的设计是掩护式和支撑掩护式液压支架整体设计的核心和基础,四连杆机构是由顶梁,掩护梁,前、后连杆和底座五大构件组成。
四连杆机构的主要作用是保证支架的纵向和横向稳定性,承受和传递外载,并能够实现移架,设计的好坏决定着顶梁端点的运动轨迹。
平行四杆垂直升降机构的运动仿真与结构优化摘要:应用solidworks软件对平行四杆垂直起升机构进行了建模和运动分析,得到了起升摇臂的作用力图解,并通过有限元技术对起升摇臂进行了仿真分析,在仿真结果的基础上进行了结构优化,优化后,起升摇臂侧板质量减轻了19.7kg,降低了42%,优化结果为生产提供了理论依据。
关键词:垂直升降;运动仿真;有限元;结构优化引言:料车是一种在各种工业用炉前对物料进行搬运的专用设备,它可以实现对需处理物料的转运、装炉和出炉等功能。
料车垂直起升机构主要用以完成加料小车的垂直升降功能,是料车各组成部分中最关键的部分。
图1平行四杆垂直起升机构简图平行四杆垂直起升机构简图如图1所示,起升摇臂的下部与机架在o1处铰接,其上部在b点与液压缸的活塞杆铰接,其中部与拉杆的左端在a点铰接;拉杆的右端与起升连杆的上部铰接,并在c 点通过滚轮与导向槽板形成滚轮滑块机构;导向槽板的右端与机架在d点形成滚轮滑块机构;液压缸、起升连杆的下部均与机架铰接。
平行四杆垂直起升机构工作时,由液压缸形成原动力,推动起升摇臂绕o1点逆时针旋转,并通过铰接的a点带动拉杆向左移动,拉杆带动起升连杆绕着o2点逆时针旋转,并通过c点的滚轮迫使其上部的导向槽板产生左上方的斜向移动趋势,右端的滚轮滑块机构用于消除导向槽板的水平移动。
此时导向槽板即可带动固定其上部的重物在垂直方向上平移,以实现垂直起升目的。
一、建模与动力学仿真利用solidworks建立平行四杆垂直起升机构的三维模型,为了便于仿真,在不影响仿真结果的前提下将中部的起升连杆部分进行了简化,且右端滑块机构也使用配合功能以于实现,图2中只给出部分模型。
这样既可减少仿真模型中零、部件数量,提高仿真效率,也可减少仿真时的冗余自由度[1]。
图2平行四杆垂直起升机构模型用solidworks motion中的配合和马达功能,使每个零件的位置、速度、加速度等参数在各时间点都完全确定,确保没有冗余自由度和欠约束的存在。
栏杆机四杆机构运动学分析1 四杆机构运动学分析1.1 机构运动分析的任务、目的和方法曲柄摇杆机构是平面连杆机构中最基本的由转动副组成的四杆机构,它可以用来实现转动和摆动之间运动形式的转换或传递动力。
对四杆机构进行运动分析的意义是:在机构尺寸参数已知的情况下,假定主动件(曲柄)做匀速转动,撇开力的作用,仅从运动几何关系上分析从动件(连杆、摇杆)的角位移、角速度、角加速度等运动参数的变化情况。
还可以根据机构闭环矢量方程计算从动件的位移偏差。
上述这些内容,无论是设计新的机械,还是为了了解现有机械的运动性能,都是十分必要的,而且它还是研究机械运动性能和动力性能提供必要的依据。
机构运动分析的方法很多,主要有图解法和解析法。
当需要简捷直观地了解机构的某个或某几个位置的运动特性时,采用图解法比较方便,而且精度也能满足实际问题的要求。
而当需要精确地知道或要了解机构在整个运动循环过程中的运动特性时,采用解析法并借助计算机,不仅可获得很高的计算精度及一系列位置的分析结果,并能绘制机构相应的运动线图,同时还可以把机构分析和机构综合问题联系起来,以便于机构的优化设计。
1.2 机构的工作原理在平面四杆机构中,其具有曲柄的条件为:a.各杆的长度应满足杆长条件,即:最短杆长度+最长杆长度≤其余两杆长度之和。
b.组成该周转副的两杆中必有一杆为最短杆,且其最短杆为连架杆或机架(当最短杆为连架杆时,四杆机构为曲柄摇杆机构;当最短杆为机架时,则为双曲柄机构)。
三台设备测绘数据分别如下:第一组(2代一套)四杆机构L1=125.36mm,L2=73.4mm,L3=103.4mm,L4=103.52mm最短杆长度+最长杆长度(125.36+73.4) <其余两杆长度之和(103.4+103.52)最短杆为连架杆,四杆机构为曲柄摇杆机构图1-1 II-1型栏杆机机构测绘及其运动位置图第二组(2代二套)四杆机构L1=125.36mm,L2=50.1mm,L3=109.8mm,L4=72.85mm最短杆长度+最长杆长度(125.36+50.1) <其余两杆长度之和(109.8+72.85)最短杆为连架杆,四杆机构为曲柄摇杆机构图1-2 II-2型栏杆机机构测绘及其运动位置图第三组(3代)四杆机构L1=163.2mm,L2=64.25mm,L3=150mm,L4=90.1mm最短杆长度+最长杆长度(163.2+64.25) <其余两杆长度之和(150+90.1)最短杆为连架杆,四杆机构为曲柄摇杆机构图1-3 III型栏杆机机构测绘及其运动位置图在如下图1所示的曲柄摇杆机构中,构件AB为曲柄,则B点应能通过曲柄与连杆两次共线的位置。
平面四杆机构的运动仿真模型分析
1前言
平面四杆机构是是平面连杆机构的基础,它虽然结构简单,但其承载能力大,而且同样能够实现多种运
动轨迹曲线和运动规律,因而在工程实践中得到广泛应用。
平面四杆机构的运动分析, 就是对机构上某点的位移、轨迹、速度、加速度进行分析, 根据原动件的运
动规律, 求解出从动件的运动规律。平面四杆机构的运动设计方法有很多,传统的有图解法、解析法和实
验法。随着计算机技术的飞速发展,机构设计及运动分析已逐渐脱离传统方法,取而代之的是计算机仿真
技术。本文在UG NX5环境下对平面四杆机构进行草图建模,通过草图中的尺寸约束、几何约束及动画尺
寸等功能确定各连杆的尺寸,之后建立相应的连杆、运动副及运动驱动,对建立的运动模型进行运动学分
析,给出构件上某点的运动轨迹及其速度和加速度变化规律曲线,文章最后简要分析几个应用于工程的平
面四杆机构实例。
2平面四杆机构的建模
2.1问题的提出
平面四杆机构因其承载能力大,可以满足或近似满足很多的运动规律,所以其应用非常广泛,本文以基
于曲柄摇杆机构的物料传送机构为例,讨论其建模及运动分析。
如图1所示,ABCD为曲柄摇杆机构,曲柄AB为主动件,机构在运动中要求连杆BC的延伸线上E点
保持近似直线运动,其中直线轨迹为工作行程,圆弧轨迹为回程或空程,从而实现物料传送的功能。
2.2平面四杆机构的建模
由于物料传送机构为曲柄摇杆机构,所以它符合曲柄存在条件。根据机械原理课程中的应用实例[1],选
取AB=100,BC=CD=CE=250,AD=200,单位均为毫米。
在UG NX5的Sketch环境里,创建如图2所示的草图,并作相应的尺寸约束和几何约束,其中EE'为通
过E点的水平轨迹参考线,用以检验E点的工作行程运动轨迹。现通过草图里的尺寸动画功能,令AB与
AD的夹角从0°到360°变化,可看到E点的变化轨迹为直线和圆弧,如图3所示为尺寸动画的四个截图,
其中图3(a)中的E点为水平轨迹的起点,图3(b)中的E点为水平轨迹的中点,图3(c)中的E点为
水平轨迹的终点,而图3(d)中的E点为圆弧轨迹(图中未画出)即回程的中点。
如E点轨迹不符合设计要求,则可适当调整各杆件的尺寸,再通过尺寸动画功能检验。
3平面四杆机构运动模型的建立及其分析
3.1运动模型的建立
在UG NX5的Motion环境里,分别建立3个Link(连杆)即AB、BCE和CD以及4个Revolute Joint
(旋转运动副),其中J001(即A点)和J004(即D点)为AB杆和CD杆的旋转运动副,而且J001
还有一个常数驱动,其初始速度为30°/Sec,如图4所示。需要指出的是,为了使四杆机构中的E点在后
处理中能够生成运动轨迹,需要在E点添加一个关联点(Associate Point),在建立连杆BCE时将该点
添加到连杆中,然后选择该点作为运动轨迹(Trace)点,在后处理中将其生成轨迹;同时为了使四杆机构
中的E点在后处理中能够生成运动规律曲线,需要在E点添加一个记号点(Marker),然后在后处理时选
择该记号点作为运动对象(Motion Object)以生成相关的变化规律曲线。
在运动模型建立后,即可对其进行解算。解算参数设置如下:
解算类型:选择常态运行(Normal Run);
分析类型:选择运动学;
时长(Time):由于AB杆的初始速度为30(度/秒),为了使其能够旋转一周,选择时长为12
(秒),即12秒×30度/秒 =360度;
步数(Step):在速度和时长确定后,步数决定该时段内运动的快慢,这里选择步数为200。
3.2运动分析及后处理
经过解算,即可对平面四杆机构进行运动仿真显示及其相关的后处理。首先通过动画(Animation)可
以观察机构的运动过程,并可随时暂停、回退等,如图5(a)所示为机构运动过程中某一位置。选择动画
中的轨迹(Trace)选项,继续观察机构的运动过程,即可看到E点所形成的运动轨迹,如图5(b)所示。
平面四杆机构的运动仿真显示后,还可生成指定记号点的位移、速度、加速度等规律曲线,如图6、图
7和图8所示为指定记号点E点的相关曲线(包括X轴和Y轴的分量)。
4工程实例中的平面四杆机构运动模型
以上所述的平面四杆机构的建模及其运动模型的建立以及运动分析和后处理方法,完全可应用于工程中
的平面四杆机构[2],以下仅简要分析其中3例,因篇幅所限不讨论有关规律曲线。
如图9所示为卡车自动卸料机构,该机构为曲柄摇块机构,其中2为车架(机架),摆动油缸3是绕
固定铰链C摆动的摇块,导杆4的一端与活塞固连,A、B、C处为转动副,3与4之间为滑动副(Slider)。
油从油缸下部流入时,推动活塞,使与车斗固连的曲柄1绕固定铰链B转动,从而达到卸料的目的,双点
划线位置为卸料的初始位置。注意这里的两个极限位置是通过UG NX5/Motion后处理中的整体机构轨迹
(Trace Entire Mechanism)功能得到的,并非由几何作图获得(下同)。
如图10所示为汽车车门开关机构,该机构为偏置摇杆滑块机构,当摇杆1由动力驱动后绕固定铰链A
转动时,带动连杆2(与车门固连)使滑块3沿固定导路4作往复移动,从而实现汽车车门开关的目的,
图中双点划线位置为汽车车门开启状态。这里对滑块3定义了两个运动副,即3与2之间的转动副以及3
与4之间的滑动副。
如图11所示为飞机起落架机构,该机构为双摇杆机构,A、D为固定铰链,摇杆1由动力驱动,摇杆3
与飞机着陆轮相连,当摇杆1转动时通过连杆2使摇杆3放下或收起,从而实现飞机起落架收放的目的,
图中双点划线位置为飞机起落架收起状态。
5结论
通过UG NX5,对平面四杆机构模型进行草图建模,并建立其运动仿真模型,在运动分析后可生成机构
上指定点的轨迹曲线,也可输出机构上指定点的位移、速度、加速度等变化规律曲线。通过机构的简要分
析,证明以上方法完全可应用于工程实例中的各种平面四杆机构。