锁相技术与频率合成器(讲座复习资料)
- 格式:doc
- 大小:556.01 KB
- 文档页数:16

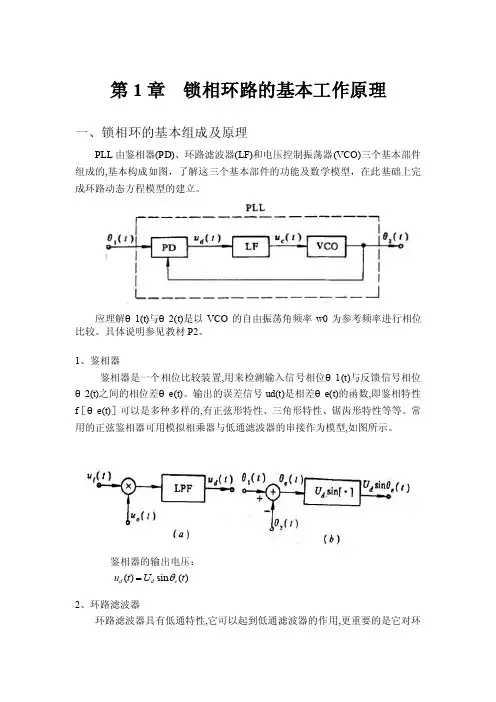
第1章 锁相环路的基本工作原理一、锁相环的基本组成及原理PLL 由鉴相器(PD)、环路滤波器(LF)和电压控制振荡器(VCO)三个基本部件组成的,基本构成如图,了解这三个基本部件的功能及数学模型,在此基础上完成环路动态方程模型的建立。
应理解θ1(t)与θ2(t)是以VCO 的自由振荡角频率w0为参考频率进行相位比较。
具体说明参见教材P2。
1、鉴相器鉴相器是一个相位比较装置,用来检测输入信号相位θ1(t)与反馈信号相位θ2(t)之间的相位差θe(t)。
输出的误差信号ud(t)是相差θe(t)的函数,即鉴相特性f [θe(t)]可以是多种多样的,有正弦形特性、三角形特性、锯齿形特性等等。
常用的正弦鉴相器可用模拟相乘器与低通滤波器的串接作为模型,如图所示。
鉴相器的输出电压:2、环路滤波器环路滤波器具有低通特性,它可以起到低通滤波器的作用,更重要的是它对环()sin ()d d e u t U t θ=路参数(如环路稳定性、环路单边噪声带宽、环路捕获时间等)调整起着决定性的作用。
环路滤波器是一个线性电路,在时域分析中可用一个传输算子F(p)来表示,其中p(≡d /dt)是微分算子;在频域分析中可用传递函数F(s)表示,其中s(a+j Ω)是复频率;若用s=j Ω代入F(s)就得到它的频率响应F(j Ω)。
主要了解RC 积分滤波器、无源比例积分滤波器及有源比例积分滤波器这三类环路滤波器的电路形式及传输函数。
a 、 R C 积分滤波器:式中τ1=RC 是时间常数,这是这种滤波器唯一可调的参数。
滤波器的频率特 性b 、无源比例积分滤波器式中τ1=(R1+R2)C ;τ2=R2C 。
这是两个独立的可调参数,其频率响应为c 、有源比例积分滤波器式中τ1=(R1+AR1+R2)C ;τ2=R2C ;A 是运算放大器无反馈时的电压增益。
若A 很大则有不考虑负号的影响,因为负号表示,鉴相器工作在鉴相器特性曲线斜率为负的那一段。
锁相环及频率合成器的原理及电路设计方案介绍引言锁相环简称PLL,是实现相位自动控制的一门技术,早期是为了解决接收机的同步接收问题而开发的,后来应用在电视机的扫描电路中。
由于锁相技术的发展,该技术已逐渐应用到通信、导航、雷达、计算机到家用电器的各个领域。
自从20世纪70年代起,随着集成电路的发展,开始出现集成的锁相环器件、通用和专用集成单片锁相环,使锁相环逐渐变成一个低成本、使用简便的多功能器件。
如今,PLL技术主要应用在调制解调、频率合成、彩电色幅载波提取、雷达、FM立体声解码等各个领域。
随着数字技术的发展,还出现了各种数字PLL器件,它们在数字通信中的载波同步、位同步、相干解调等方面起着重要的作用。
随着现代电子技术的飞快发展,具有高稳定性和准确度的频率源已经成为科研生产的重要组成部分。
高性能的频率源可通过频率合成技术获得。
随着大规模集成电路的发展,锁相式频率合成技术占有越来越重要的地位。
由一个或几个高稳定度、高准确度的参考频率源通过数字锁相频率合成技术可获得高品质的离散频率源。
1 锁相环及频率合成器的原理1.1 锁相环原理PLL是一种反馈控制电路,其特点是:利用外部输入的参考信号控制环路内部振荡信号的频率和相位。
因PLL可以实现输出信号频率对输入信号频率的自动跟踪,所以PLL通常用于闭环跟踪电路。
PLL在工作的过程中,当输出信号的频率与输入信号的频率相同时,输出电压与输入电压保持固定的相位差值,即输出电压与输入电压的相位被锁住,这就是PLL名称的由来。
PLL通常由鉴相器(PD)、环路滤波器(LF)和压控振荡器(VCO)三部分组成,PLL组成的原理框图如图1所示。
PLL中的鉴相器又称为相位比较器,它的作用是检测输入信号和输出信号的相位差,并将检测出的相位差信号转换成uD(t)电压信号输出,该信号经低通滤波器滤波后形成压控。
第一章锁相环路的基本工作原理:1.锁相环路是一个闭环的相位控制系统;锁相环路(PLL)是一个相位跟踪系统,它建立了输出信号顺时相位与输入信号瞬时相位的控制关系。
2. 若输入信号是未调载波,θi(t)即为常数,是u i(t)的初始相位;若输入信号时角调制信号(包括调频调相),θi(t)即为时间的函数。
3.ωo是环内被控振荡器的自由振荡角频率;θo(t)是以自由振荡的载波相位ωo t为参考的顺时相位,在未受控制以前它是常数,在输入信号控制之下,θo(t)即为时间的函数。
4. 输入信号频率与环路自由振荡频率之差,称为环路的固有频率环路固有角频差:输入信号角频率ωi与环路自由振荡角频率ωo之差。
瞬时角频差:输入信号频率ωi与受控压控振荡器的频率ωv之差。
控制角频差:受控压控振荡器的频率ωv与自由振荡频率ωo之差。
三者之间的关系:瞬时频差=固有频差-控制频差。
5. 从输入信号加到锁相环路的输入端开始,一直到环路达到锁定的全过程,称为捕获过程。
6. 对一定环路来说,是否能通过捕获而进入同步完全取决于起始频差。
7. 锁定状态又叫同步状态:①同频②相位差固定8. 锁定之后无频差,这是锁相环路独特的优点。
9. 捕获时间T p的大小除决定于环路参数之外,还与起始状态有关。
10.若改变固有频差∆ωo,稳定相差θe(∞)会随之改变。
11.锁相环路基本构成:由鉴相器(PD)、环路滤波器(LF)和电压控制振荡器(VCO)组成。
12.鉴相器是一个相位比较装置,鉴相器的电路总的可以分为两大类:第一类是相乘器电路,第二类是序列电路。
13.环路滤波器具有低通特性。
常见的环路滤波器有RC积分滤波器、无源比例积分滤波器和有源比例积分滤波器三种。
(会推导它们的传输算子)14.电压振荡器是一个电压-频率变换装置,它的振荡频率应随输入控制电压u c(t)线性的变化。
15.压控振荡器应是一个具有线性控制特性的调频振荡器。
要求压控振荡器的开环噪声尽可能低,设计电路时应注意提高有载品质因素和适当增加振荡器激励功率,降低激励级的内阻和振荡管的噪声系数。
锁相技术总复习题1.什么是锁相?频率合成的基本含义是什么?锁相技术与频率合成技术的关系如何?答:锁相:使输出周期性信号与输入周期性参考信号频率相等(频率同步或为整数倍关系),而相位差保持恒定(相位锁定)的过程。
频率合成是将一个高精确度和高稳定度的标准参考频率,经过混频、倍频与分频等,对它进行加、减、乘、除的四则运算,最终产生大量的具有同样精确度和稳定度的频率源。
锁相与频率合成技术是实现相位自动控制的一门学科,是专门研究系统相位关系的技术。
2.锁相环的基本工作状态?对应的性能指标?P5答:两种基本工作状态:一是捕获过程,二是同步。
捕获过程有两个主要的性能指标,一是捕获带,另一个是捕获时间。
同步的性能指标有稳态相差和环路的同步带。
3.给出环路构成框图,说明各部分的基本作用。
为什么VCO是其固有积分环节?P5答:图略。
压控振荡器的数学模型为。
从模型上看,压控振荡器具有一个积分因子1/P,这是相位与角频率之间的积分关系形成的,锁相环路中要求压控振荡器输出的是相位,因此,这个积分作用是压控振荡器所固有的,通常称压控振荡器是锁相环路中的固有积分环节。
4.给出环路相位模型和动态方程,说明其作用以及动态方程的物理意义。
P10、115.一阶环捕获的特点?一阶环的捕获带、同步带、快捕带?答:一阶环的捕获过程没有周期跳跃,锁定过程是渐近的,且捕获时间的长短与初始状态有关。
捕获带:环路能通过捕获过程而进入同步状态所允许的最大固有频差。
同步带:锁相环路能够保持锁定状态所允许的最大固有频差。
快捕带:保证环路只有相位捕获一个过程的最大固有频差。
6.如何理解一阶环失锁状态下的频率牵引作用?P177.频率合成的基本方法有哪些?简要说明各自特点。
答:频率合成的基本方法:1.直接频率合成(DS),特点是,快速频率转换,任意高的分辨力,低相位噪声,高工作频率,硬件设备复杂,造价昂贵,输出有无用的寄生频率。
2.锁相频率合成(IS),特点是,性能较完善,应用最广,可满足大多数应用要求。
锁相与频率技术第一章1;锁相环路是一个相位跟踪系统,它建立了输出信号瞬时相位与输入信号瞬时相位的控制关系,2;固有频差:输入信号环路自由振荡频率之差,称为环路的固有频差。
3;锁相环路的两种基本工作状态:锁定状态和失锁状态,4;捕获过程:从输入信号加到锁相环路的输入端开始,一直到环路达到锁定的全过程。
5;捕获带:对一定的环路来说,是否能通过捕获而进入同步完全取决于起始频差----若---超过某一范围,环路就不能捕获了,这个范围的大小是锁相环路的一个重要性能,称为环路的捕获带---6;稳态相差:当环路进入同步状态之后,环内被控振荡器的振荡频率已等于输入信号频率,也就是说输出信号已锁定在输入信号上。
两信号之间只差一个固定的相位,这就是锁定以后的稳态相差,是一个很小的值。
7;同步带:锁相环路能够保持锁定状态所允许的最大固有频差称为同步带,8;锁相环路的基本构成框图及基本工作原理:9;鉴相器电路的分类及工作原理:第一类是相乘器电路,它是对输入信号波形与输出信号波形的乘积进行平均,从而获得直流的误差输出,第二类是序列电路,它的输出电压是输入信号过零点与反馈电压过零点之间时间差的函数,10;常用的三种环路滤波器:RC积分滤波器、无源比例滤波器、有源比例滤波器三种。
11;压控振荡器是一个电压与频率变换装置,环路中要求压控振荡器的输出是相位。
12;压控振荡器输出的是相位的原因?锁相环路中要求压控振荡器输出的是相位,因此,这个积分作用是压控振荡器所固有的,正因为这样,通常称压控振荡器是锁相环路中的固有积分环节,13;锁相环路的相位模型及环路动态方程的一般形式?14;动态方程构成的关系:瞬时频差=固有频差—控制频差15;相轨迹:平面上相点的移动形成一条轨迹,16;相点:平面上曲线是的一个点表示了环路在某个时刻t状态,称为相点。
17;延滞现象:出现不稳定平衡状态的滞留,致使捕获过程延长。
这就是锁相环路的延滞现象,18;频率牵引现象:经过锁相环路的控制作用,使被控振荡器的平均频率向输入信号频率方向牵引的现象。
222锁相技术与频率合成器第一节 教学主要内容一、反馈控制电路(一)基本概念1.采用反馈控制电路的目的是提高通信系统的技术性能,或者实现某些特殊的高指标要求。
2.通信系统中常用的有自动振幅控制、自动频率控制和自动相位控制。
3.反馈控制电路是由被控对象和反馈控制器两部分组成。
图10-1 反馈控制电路的组成方框图4.反馈控制电路中X o 为系统的输出量,X R 为系统的输入量,是反馈控制器的比较标准。
5.根据实际工作的需要,每个反馈控制电路的X o 和X R 之间都具有确定的关系,例如X o =g (X R )。
若这一关系受到破坏,则反馈控制器就能够检测出输出量与输入量的关系偏离X o =g (X R )的程度,产生相应的误差量X e , 加到被控对象上对输出量X o 进行调整,使X o 与X R 之间的关系接近或恢复到预定的关系X o =g (X R )。
(二)自动相位控制电路(锁相环路)1.用途:在通信系统中能实现频率合成、频率跟踪等许多功能。
2.锁相环路的被控量是相位,被控对象是压控振荡器(VCO)。
在反馈控制器中对振荡相位进行比较。
利用误差量对VCO 的输出相位进行调整。
图10-4 自动相位控制方框图2233. VCO 输出电压的相位受u c 控制。
而u c 是VCO 的输出电压的相位θV 与环路输入相位θR 经鉴相器产生的误差电压u e 经环路滤波器后得到的控制电压。
4.控制环路的输入量为θR ,输出量为θV 。
二、自动相位控制电路(锁相环路)(一)锁相环路的基本原理1.鉴相器及其相位模型(1)功能:比较输入信号相位和VCO 输出信号的相位,其输出电压与两信号的相位差成正比。
(2)实现电路:模拟乘法器图10-5 等效鉴相器(3)鉴相特性鉴相器的输入信号分别为u V (t )=U Vm cos [ωo t +θV (t )]u R (t )=U Rm sin [ωR t +θR (t )]=U Rm sin [ωo t +(ωR -ωo )t +θR (t )]=U Rm sin [ωo t +θ1(t )] 式中,θ1(t )=(ωR -ωo )t +θR (t )称为输入信号以相位ωo t 为参考的瞬时相位。
经相乘器,其输出电压 ()()M R V u K u t u t 为K M u R (t )u V (t )=K M U Rm sin [ωo t +θ1(t )]U Vm cos [ωo t +θV (t )] =12K M U Rm U Vm sin [2ωo t +θ1(t )+θV (t )] +12K M U Rm U Vm sin [θ1(t )-θV (t )] 式中,K M 为乘积系数,单位1/V 。
由于环路有低通滤波,起作用的是低频分量,即u d (t )= 12K M U Rm U Vm sin [θ1(t )-θV (t )]=K d sin θe (t ) 式中,K d =K M U Rm U Vm /2为鉴相器的最大输出电压。
θe (t )=θ1(t )-θV (t )为鉴相器输入信号的瞬时相差。
可见,乘法器作为鉴相器的鉴相特性是正弦特性。
(4)鉴相器的相位模型224图10-6 鉴相器的相位模型2.VCO 及其相位模型(1)功能:它是一种电压--频率变换器,振荡频率ωV (t )受电压u c (t )的控制。
(2)VCO 的频率与电压的关系图10-7 压控振荡器调频特性在一定范围内,ωV 与u c 的关系可认为是线性的,即ωV (t )=ωo +K V u c (t )式中,ωo 是u c (t )=0时,压控振荡器的固有振荡频率,K V 是压控振荡器调频特性的斜率。
称为压控灵敏度(rad/s·V)。
(3)VCO 输出电压相位与u c (t )的关系VCO 输出电压的瞬时总相位为0()tv t ω⎰dt=ωo t +K V 0()tc u t ⎰dt 而以ωo t 为参考相位的瞬时相位为θV (t )=K V0()t c u t ⎰dt=()v c K u t p式中,微分算子p =d/d t 。
(4)VCO 的相位模型225图10-8 VCO 的相位模型3.环路滤波器及其相位模型(1)功能:滤除鉴相器输出的高频部分,并抑制噪声,提高环路的稳定性。
(2)电路形式:常用有RC 滤波器、无源比例积分滤波器和有源比例积分滤波器等。
(3)环路滤波器输出与输入的关系u c (t )=K F (p )u d (t )(4)环路滤波器的数学模型图10-9 环路滤波器数学模型4.锁相环路的相位模型图10-10 锁相环路的相位模型5.锁相环路的基本方程(相位控制方程)θe (t )=θ1(t )-θV (t )=θ1(t )-K d K V K F (p )p1sin θe (t ) (1)θe (t )是鉴相器的输入信号与VCO 输出信号(即鉴相器的另一输入信号)之间的瞬时相位差;(2)K d K V K F (p )p1sin θe (t )是控制相位差; (3)任何时候环路的瞬时相位差和控制相位差之代数和等于输入信号以相位ωo t 为参考的瞬时相位。
6.锁相环路的频率动态平衡关系将相位控制方程对时间微分,可得频率动态平衡关系。
因为p =d/d t ,可得pθe (t )+K d K V K F (p )sin θe (t )=pθ1(t )(1)pθe (t )是VCO 的振荡角频率偏离输入信号角频率的数值0()R v t ωω-,称为瞬时角频差;(2)K d K V K F (p )sin θe (t )是VCO 在控制电压u c (t )=K d K F (p )sin θe (t )作用下的振荡角频率()v t ω偏离0ω的数值0()v t ωω-,称为控制角频差;(3)p θ1(t )是输入信号角频率0R ω偏离0ω的数值00R ωω-,称为输入固有角频差;(4)环路闭合后的任何时刻,瞬时角频差和控制角频差之代数和恒等于输入固有角频226差。
(二)环路“锁定”的基本概念1.环路进入锁定状态的过程当环路输入一个频率和相位不变的信号u R (t )=U Rm sin(ωR 0t+θR 0)时,根据以ωo t 为参考的瞬时相位可得u R (t )=U Rm sin [ωo t +(ωR 0-ωo )t +θR 0]=U Rm sin [ωo t +θ1(t )]θ1(t )=(ωR 0-ωo )t +θR 0pθ1(t )=ωR 0-ω0=Δω根据环路方程pθe (t )+K d K V K F (p )sin θe (t )= pθ1(t )[ωR 0-ωV (t )]+[ωV (t )-ωo ]=ωR 0-ωo瞬时角频差 控制角频差 固有角频差(1)当环路闭合瞬间u c (t )=0,ωV (t )=ωo ,无控制角频差,此时环路的瞬时角频差等于输入固有角频差。
(2)随时间t 的增加,有控制电压产生,控制角频差就存在。
随着控制角频差的加大,瞬时角频差就减小,二者之和等于输入固有角频差。
(3)当控制角频差增大到等于固有角频差,瞬时角频差为零。
即lim pθe (t )=0。
这时θe (t )是一固定的值,不随时间变化。
若能一直保持下去,则认为进入锁定状态。
2. 环路进入锁定状态后的特点(1)VCO 输出电压的角频率ωV (t )等于输入信号频率ωR 0,即无剩余频差,pθe (∞)=0。
(2)环路锁定后,VCO 输出信号与输入信号之间只存在一个固定的稳态相位差,即剩余相位差θe (∞)为一固定值。
(3)环路处于锁定状态时,鉴相器的输出电压为直流。
()sin d d e u K θ=∞(4)环路处于锁定状态时,控制角频差K d K V K F (0)()sin e θ∞ =Δω0,则()00arcsin arcsin (0)e d V F pK K K K ωωθ∆∆∞== 式中,K p =K d K V K F (0)为环路的直流总增益,通常称为环路增益,单位rad/s 。
(三)锁相环路的跟踪特性1.什么是跟踪特性?环路锁定后,若输入信号的频率或相位发生变化,环路通过闭环调节,来维持锁定状态的过程称为跟踪。
跟踪性能是表示环路跟随输入信号频率或相位变化的能力。
2.衡量锁相环路跟踪性能好坏的指标是跟踪相位误差,即相位误差函数()t e θ的瞬态响应和稳态响应。
(1)瞬态响应描述跟踪速度的快慢及跟踪过程中相位误差波动大小。
(2)稳态响应是当t →∞时的相位差,表征系统的跟踪精度。
2273.瞬态相位误差()t e θ的求解步骤与结论(1)求出输入信号()t 1θ的拉氏变换()s 1θ;(2)用环路的误差传递函数()e H s ,通过()()1()e e s H s s θθ=求环路相差的拉氏变换; (3)将()s e θ进行拉氏反变换求得()t e θ,则可求得瞬态误差随时间的变化规律;(4)结论:锁相环路瞬态过程的性质由环路的阻尼系数ζ决定。
对二阶环,当ζ<1 时,瞬态过程是衰减振荡,环路处于欠阻尼状态;当ζ>1 时,瞬态过程按指数衰减,尽管也有过冲,但不会在稳态值附近多次摆动,环路处于过阻尼状态;ζ=1时,环路处于临界阻尼状态,其瞬态过程没有振荡;环路在达到稳定前,相位误差在稳定值上下摆动,在变化过程中最大瞬态相位误差称为过冲。
ζ越小,过冲量越大,环路稳定性差。
兼顾小的稳态相位误差和小的过冲量,ζ一般选0.707比较合适。
4. 稳态相位误差()∞e θ的求解与结论(1)从()e t θ的表示式,令t →∞,求出()lim ()e e t t θθ→∞∞=。
(2)利用拉氏变换的终值定理,直接从1()()()e e s H s s θθ=求出10()lim ()lim ()()e e e t s t sH s s θθθ→∞→∞== (3)结论:同环路对不同输入的跟踪能力不同, ()e θ∞=∞意味着环路不能跟踪;同一输入,采用不同环路滤波器的环路的跟踪性能不同,环路滤波器对改善环路性能作用很大;对于二阶环,同一输入的跟踪能力与环路的“型”有关。
“型”越高,跟踪精度越高;二阶I 型环跟踪输入相位阶跃无稳态相位差,跟踪频率阶跃有固定的稳态相差,不能跟踪频率斜升;Ⅱ型环跟踪相位阶跃和频率阶跃均无稳态相差,跟踪频率斜升有固定的稳态相差;Ⅲ型环跟踪相位阶跃、频率阶跃和频率斜升均无稳态相差。
(四)锁相环路的应用1.锁相环路的主要特点:(1)具有良好的跟踪特性;(2)具有良好的窄带滤波特性(3)锁定状态无剩余频差;(4)易于集成化2.锁相环路的应用举例(1)锁相倍频电路228图10-11 锁相倍频电路方框图 特点:输出信号频率ωo =Nωi ;频率纯度高。