Atmega128外部中断程序
- 格式:doc
- 大小:23.00 KB
- 文档页数:2

ATmega128 单片机硬件电路设计在本系统中,本小节主要讲ATmega128 单片机的内部资源、工作原理和硬件电路设计等。
2.5.1 ATmega128 芯片介绍ATmega128 为基于AVR RISC 结构的8 位低功耗CMOS 微处理器。
片内ISP Flash 可以通过SPI 接口、通用编程器,或引导程序多次编程。
引导程序可以使用任何接口来下载应用程序到应用Flash 存储器。
通过将8 位RISC CPU 与系统内可编程的Flash 集成在一个芯片内,ATmega128 为许多嵌入式控制应用提供了灵活而低成本的方案。
ATmega128 单片机的功能特点如下:(1)高性能、低功耗的AVR 8 位微处理器(2)先进的RISC 结构①133 条指令大多数可以在一个时钟周期内完成② 32x8 个通用工作寄存器+外设控制寄存器③全静态工作④工作于16 MHz 时性能高达16 MIPS ⑤只需两个时钟周期的硬件乘法器(3)非易失性的程序和数据存储器① 128K 字节的系统内可编程Flash ②寿命: 10,000 次写/ 擦除周期③具有独立锁定位、可选择的启动代码区(4)通过片内的启动程序实现系统内编程① 4K 字节的EEPROM ② 4K 字节的内部SRAM ③多达64K 字节的优化的外部存储器空间④可以对锁定位进行编程以实现软件加密⑤可以通过SPI 实现系统内编程(5)JTAG 接口(与IEEE 1149.1 标准兼容)①遵循JTAG 标准的边界扫描功能②支持扩展的片内调试③通过JTAG 接口实现对Flash,EEPROM,熔丝位和锁定位的编程(6)外设特点①两个具有独立的预分频器和比较器功能的8 位定时器/ 计数器②两个具有预分频器、比较功能和捕捉功能的16 位定时器/ 计数器③具有独立预分频器的实时时钟计数器④两路8 位PWM ⑤ 6 路分辨率可编程(2 到16 位)的PWM ⑥输出比较调制器⑦ 8 路10 位ADC ⑧面向字节的两线接口⑨两个可编程的串行USART ⑩可工作于主机/ 从机模式的SPI 串行接口(7)特殊的处理器特点①上电复位以及可编程的掉电检测②片内经过标定的RC 振荡器③片内/ 片外中断源④ 6 种睡眠模式: 空闲模式、ADC 噪声抑制模式、省电模式、掉电模式、Standby 模式以及扩展的Standby 模式⑤可以通过软件进行选择的时钟频率⑥通过熔丝位可以选择ATmega103 兼容模式⑦全局上拉禁止功能ATmega128 芯片有64 个引脚,其中60 个引脚具有I/O 口功能,资源比较丰富,下面对ATmega128 的各个引脚做简单介绍:VCC:数字电路的电源。

开发板使用文档1、 PCB 视图:2、 开发板电源1、输入电压:9~12V2、USB 供电:5V3、 跳冒说明:J0:蜂鸣器跳冒J1:使用12864液晶时,由于不同厂家生产的液晶的19脚和20脚有所不同,为了方便使用,采用跳冒形式选择适合你液晶的接口,J2:使用1602液晶时跳冒选择:J1 A K 19脚 3‐1 3‐4 20脚2‐12‐4液晶 跳冒选择12864 2‐4(12864并行),3‐4(12864串并程序选择)16022‐4(1602必选)3、功能说明:1、温度传感器18B202、两通道ADC3、4位数码管显示4、实时时钟DS13025、串口0,串口16、SD卡读写7、IIC_24C02(TWI)8、RS485通讯9、LCD12864接口10、LCD1602接口11、6个按键(有上,下,左,右,确定,取消)12、跑马灯13、SPI14、JTAG接口15、ISP接口16、蜂蜜器17、USB供电18、I/O口扩展4、实验例程:1、跑马灯2、数码管显示3、蜂鸣器4、定时器0输出方波5、定时器2中断6、外部中断7、串口实验 8、RS4859、AT24C02 10、按键实验11、1602液晶显示 12、12864液晶显示13、ADC数码管显示实验 14、ADC在12864液晶显示15、DS18B20数码管显示 16、DS18B20液晶1620显示17、DS18B20液晶LCD12864显示 18、DS1302实时时钟1602显示19、DS1302实时时钟LCD12864显示 20、DS18B20实时时钟液晶显示21、串口多机通讯 22、RS485多机通讯23、SD卡读写 24、SPI通讯25、μCOS-II在ATmega128开发板上的移植。

ATmega128串口通信程序(中断方式)2011-06-05 20:08:10| 分类:单片机程序编写| 标签:|字号大中小订阅程序采用IAR系统编译,实现使用串口调试助手收发数据的功能#include<iom128.h>#include<inavr.h>#include<string.h>#define INT8U unsigned char#define INT16U unsigned int#define UDRIE0 5/* UART Buffer Defines */#define UART0_RX_BUFFER_SIZE 128#define UART0_TX_BUFFER_SIZE 128/* Static Variables */static unsigned char UART0_RxBuf[UART0_RX_BUFFER_SIZE];static volatile unsigned char UART0_RxHead;static volatile unsigned char UART0_RxTail;static unsigned char UART0_TxBuf[UART0_TX_BUFFER_SIZE];static volatile unsigned char UART0_TxHead;static volatile unsigned char UART0_TxTail;static unsigned char UART0_Flag=1;void USART_INIT( void ){UBRR0H = 0x00;UBRR0L = 0x0B;//9600 at 1.8432MUCSR0A = 0x20;UCSR0B = 0xD8;//开接收结束中断,发送结束中断接收使能,发送使能UCSR0C = 0x06;//异步模式,1位停止位,8位数据位UDR0 = 0x00;//清空数据寄存器UART0_RxTail = 0;UART0_RxHead = 0;UART0_TxTail = 0;UART0_TxHead = 0;__disable_interrupt();//关全局中断}void Tran_Byte( INT8U sdata ){if(UART0_Flag == 0){UDR0 = sdata;UART0_Flag = 1;}else{UART0_TxBuf[UART0_TxHead] = sdata;UART0_TxHead++;if(UART0_TxHead >= UART0_TX_BUFFER_SIZE) UART0_TxHead = 0; }__enable_interrupt();}void Send_String( INT8U *string ){INT8U temp;while(1){temp = *string;Tran_Byte(temp);string++;if(*string == 0x00)break;}}INT8U HaveDataRxd( void ){if(UART0_RxHead != UART0_RxTail) return 1;elsereturn 0;}INT8U GetDataFromRxdBuf( void ){INT8U temp;temp = UART0_RxBuf[UART0_RxTail];UART0_RxTail ++ ;if( UART0_RxTail >= UART0_RX_BUFFER_SIZE ) { UART0_RxTail = 0 ;}return temp;}//清空接收缓冲区。
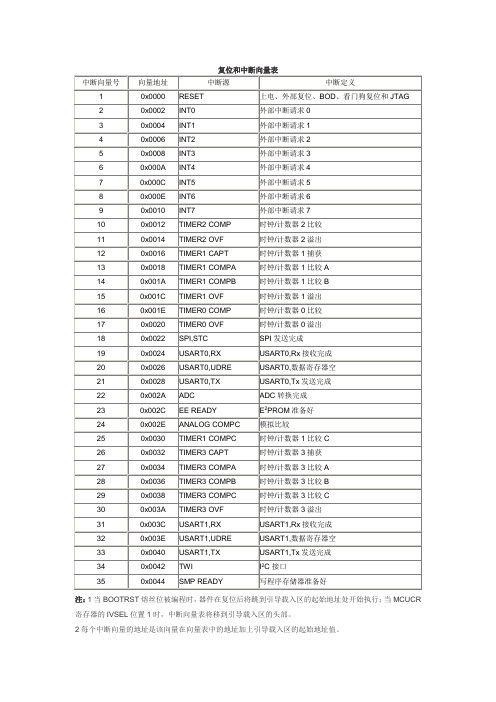
A VR的中断源比较多,尤其是ATmega128,一共有35个外部以及内部中断源。
通常情况下,Flash程序存储器空间的最低位置(0x0000-0x0045)定义为复位和中断向量空间。
完整的中断向量见第二章表2-23。
在中断向量表中,处于低地址的中断向量所对应的中断拥有高优先级,所以,系统复位RESET拥有最高优先级。
A.中断设计注意点:1.具备Bootloader功能的A VR,其中断向量区可以在Flash程序存储器空间最低位置和Bootloader区的头部来回迁移,这主要用于配合Bootloader程序的应用。
如果不使用Bootloader功能,一般不要中断向量区进行迁移。
2.Flash较小的A VR芯片,其一个中断向量占据1个字的空间,用于放置一条相对转移RJMP指令(范围-2K~+2K字),跳到中断服务程序。
对于不使用的中断,在中断向量区中应放置1条中断返回指令RETI,增强程序的抗干扰性。
3.ATmega128的Flash空间为64K字节,因此它的一个中断向量占据2个字的空间,用于放置一条绝对转移JMP指令(指令长度为2个字),跳到中断服务程序。
对于不使用的中断,在中断向量区中应连续放置2条中断返回指令RETI,增强程序的抗干扰性。
当使用汇编语言编写系统程序时应注意。
4.当MCU响应一个中断时,其硬件系统会自动中断返回地址压入系统堆栈,并将关闭全局中断响应(硬件将中断标志I位清0),清除该中断的中断标志位;执行中断返回指令RETI时,硬件会先允许全局中断响应(硬件将中断标志I位置1),然后从系统堆栈中弹出返回地址到PC程序计数器中,继续执行被中断打断的程序。
除此之外,MCU的硬件没有对中断保护做其他处理。
5.因此,用户在编写中断服务程序时,首先要编写中断现场保护程序,如保护MCU的状态寄存器等。
在中断返回之前,不要忘记恢复中断现场。
6.如果设置和允许外部中断响应,即使是外部INT0..7引脚设置为输出方式,在引脚上的电平变化也会触发外部中断的发生,这一特性提供了使用软件产生中断的途径。
AVR单片机Atmega128外扩RAM关键字:AVR单片机Atmega128 外扩RAM由于AVR系列单片机采用的是内部外部RAM统一编址,ATmega128工作在非ATmega 103模式时具有4k+256B的包括寄存器文件(通用工作寄存器)、I/O寄存器、扩展I/O寄存器和内部SRAM的连续内部存储空间。
所以在扩展外部RAM时,和内部SRAM地址重叠的外部RAM地址是不能直接访问的。
也就是说扩展的外部RAM每64k要浪费掉内部SRAM那么大的空间(AT90系列如此)。
所幸的是mega系列解决了这一缺点,专门有一个寄存器XMCRB用来解决对与内部SRAM地址空间相同地址的外部RAM访问。
其低三位XMM2 、XMM1 、XMM0三位的设置,决定高位地址线PC口的哪些口线被释放为普通I/O,而不是作为高位地址。
这样就可以巧妙地屏蔽高位,就ATmega128而言,要避开内部的4k+245B空间,注意到,只要所访问的地址范围大于0X1100(且MCUCR,XMCRA设置正确),那么所访问的就是外部RAM空间。
所以在访问小于4k+245B的外部地址时,只要使地址大于0X10FF就可以访问了。
0X1100用二进制表示为:0001,0001,0000,0000,高位地址线PC5、PC6、PC7没有使用到。
在访问的时候就可设置XMCRB的XMM1、XMM0位为1,释放该三根地址线为普通I/O,将其设为输出。
并且输出0;并在外部地址加上一个虚地址以使地址超过0X1100,如此设置,就可以访问外部0X0000~0X10FF空间了。
超出这个空间,CPU就自动将其识别为外部相应的地址了,不用设置XMCRB寄存器(即不需释放任何总线),也不需加虚地址,按照正常外部RAM访问即可。
在此约定所加的虚地址为0X2000,XMCRB寄存器设置为****,*011,所释放的地址线输出0。
表10-0X10FF范围的寄存器状态和寻址范围(略)表2各寻址范围地址线和寄存器状态表(略)表3各寻址范围地址线和寄存器状态表(略)比如要访问外部0X0200地址,用二进制表示为0000,0010,0000,0000。
产品特点•高性能、低功耗的 AVR® 8位微处理器•先进的 RISC 结构–133条指令 – 大多数可以在一个时钟周期内完成–32 x 8 通用工作寄存器 + 外设控制寄存器–全静态工作–工作于16 MHz时性能高达16 MIPS–只需两个时钟周期的硬件乘法器•非易失性的程序和数据存储器–128K 字节的系统内可编程Flash寿命: 10,000次写/擦除周期–具有独立锁定位、可选择的启动代码区通过片内的启动程序实现系统内编程真正的读-修改-写操作–4K字节的EEPROM寿命: 100,000次写/擦除周期–4K 字节的内部SRAM–多达64K字节的优化的外部存储器空间–可以对锁定位进行编程以实现软件加密–可以通过SPI实现系统内编程•JTAG接口(与IEEE 1149.1标准兼容)–遵循JTAG标准的边界扫描功能–支持扩展的片内调试–通过JTAG接口实现对Flash, EEPROM, 熔丝位和锁定位的编程•外设特点–两个具有独立的预分频器和比较器功能的8位定时器/计数器–两个具有预分频器、比较功能和捕捉功能的16位定时器/计数器–具有独立预分频器的实时时钟计数器–两路8位PWM–6路分辨率可编程(2到16位)的PWM–输出比较调制器–8路10位ADC8个单端通道7个差分通道2个具有可编程增益(1x, 10x, 或200x)的差分通道–面向字节的两线接口–两个可编程的串行USART–可工作于主机/从机模式的SPI串行接口–具有独立片内振荡器的可编程看门狗定时器–片内模拟比较器•特殊的处理器特点–上电复位以及可编程的掉电检测–片内经过标定的RC振荡器–片内/片外中断源–6种睡眠模式: 空闲模式、ADC噪声抑制模式、省电模式、掉电模式、Standby模式以及扩展的Standby模式–可以通过软件进行选择的时钟频率–通过熔丝位可以选择ATmega103兼容模式–全局上拉禁止功能•I/O和封装–53个可编程I/O口线–64引脚TQFP与 64引脚 MLF封装•工作电压–2.7 - 5.5V ATmega128L–4.5 - 5.5V ATmega128•速度等级–0 - 8 MHz ATmega128L–0 - 16 MHz ATmega128微处理器,具有128K字节的系统BDTIC /ATMEL2ATmega1282467L–AVR–05/04引脚配置Figure 1. ATmega128的引脚综述ATmega128为基于AVR RISC 结构的8位低功耗CMOS 微处理器。
此外,ATmega128自带输入上拉电阻功能,通过设置即可以实现其功能。
例如将PA口设为输入口并且加上拉电阻,可以如下设置:DDRA=0x00;//将PA口设置为输入端口PORA=0xff;//将PA输入口加上拉电阻(2)位操作的使用方法采用ICCAVR对ATmega128的位操作的使用方法比较麻烦,不像51系列那样可以直接对某一个引脚进行置0或置1,而是要通过如下的方法进行位操作:如要对PA端口的第1位置1,则用C语言必须按PORTA|=(1<<pa1)编写;如要对pa端口的第2位置0,则用c语言必须按porta&=*(1<<pa2)编写。
<> </pa1)编写;如要对pa端口的第2位置0,则用c语言必须按porta&=*(1<<pa2)编写。
<>这样就可以单独对某一位操作而不影响其他位。
位操作对其他寄存器也同样适合,例如若要对某个口的几位设为输入,某几位设为输出,就可以通过上面的置1、置0方法来实现。
(3)中断ATmega128中断资源丰富,一共有35个中断源,在ICCAVR的iom128v.h头文件中给出了这些中断源对应的中断向量表。
当用到相应的中断时,首先应设置好对应的中断向量。
用ICCAVR设置ATmega128中断的方法与Keil51设置中断的方法截然不同,例如若需要将ATmega128的串口0设置为中断接收,就必须在程序中做如下设置:#pragma interrupt_handler uart0_rx_isr:iv_USART0_RXC否则程序不能中断接收,延长开发过程。
ATmega128作为一种功能强大的芯片,相信会在不同的领域发挥不同的作用,为此需要人们不断地提高对ATmega128的认识。
而且ATmega128与AVR等其他单片机如ATmega8、ATmega103、AT90S8535系列有相同的开发方法,掌握了ATmega128就可以在开发其他AVR类型的单片机时应用自如。