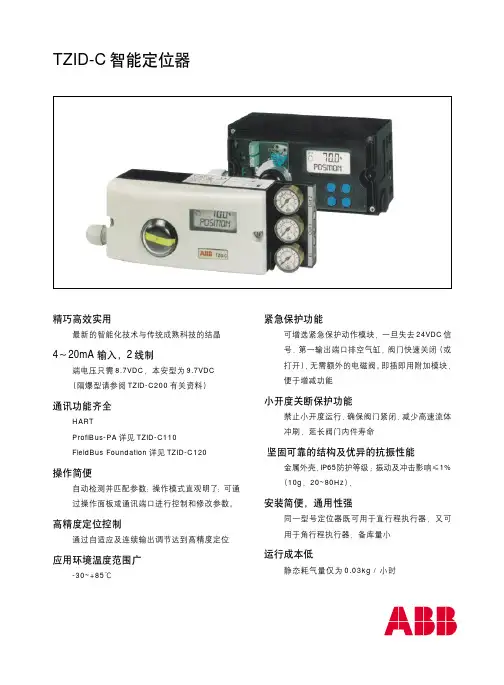
ABB阀门定位器TZID中文手册
- 格式:doc
- 大小:414.50 KB
- 文档页数:10
ABB TZIDC说明书一、安装注意:在定位器后面有一个连接反馈杆的位置传感器伸出端,安装时,在行程50%时,附在位置传感器伸出端上的白色指针要对准边上刻度指示盘上中间或(给定位器加上电流源,定位器液晶显示指示SENS-POS 0°),此时要保证反馈杆牢牢固定在位置传感器伸出端上,螺丝固定点要在位置传感器伸出端的平面上。
要保证直行程时,反馈杆的上下转动角度在±30°内;角行程时,反馈杆的左右转动角度在±60°内,在0°确定好后,可通过移动定位器反馈杆上与阀门反馈杆连接的指针位置来调整转动角度。
二、接线:1、4~20mA+、-输入信号接到定位器11+、12-端子上。
2、反馈信号连接。
24V+接到定位器31+端子上,32-端子接到万用表的红表笔,万用表黑表笔接到24V-上,(万用表必须选择在测电流档上)。
看万用表指示可读出定位器的电流反馈输出值。
三、调试:1、正确气源连接(根据指示单或标牌上工作气源压力,调整减压阀)。
2、正确接线3、检查合适安装:按住定位器面板上MODE按钮不要松开,点动按定位器上箭头或下箭头直到液晶显示出现MAN-SENS 1.3(作用是手动调整传感器转动位置),松开MODE 按钮,按上箭头或下箭头驱动执行机构使阀门移动到开和关两个机械限位上,观察液晶显示器上角度。
最好保证:直行程执行机构转动角度在±28°之间。
角行程执行机构转动角度在±57°之间。
4、自动调试:对于直行程执行机构:A:按住MODE按钮不松开,直到出现ADJ-LIN,然后松开MODE按钮B:再次按住MODE按钮不松开,液晶显示器会出现3数字,并且3会变2,再变1,再变0C:到零时,松开MODE按钮,自动调试开始对于角行程执行机构:A:按住ENTER按钮不松开,直到出现ADJ-ROT,然后松开ENTER按钮B:再次按住MODE按钮不松开,液晶显示器会出现3数字,并且3会变2,再变1,再变0C:到零时,松开ENTER按钮,自动调试开始当调试功能自动成功完成时,参数设置自动保存,且参数返回到模式1.1 显示位置开度%。
TZID-C 智能定位器安装及操作说明书MOTOYAMA ENG. WORKS LTD本山製作所株式 会社气路连接•使用与定位器气源端口处标识的标准接口连接气源•连接定位器的输出与气动执行器的气缸电气连接根据下列接线端子图以及设计要求进行相应的配线(一般只需+11,-12,+31,-32)调试步骤1.接通气源,检查减压阀后压力是否符合执行器的铭牌参数要求(定位器的最大供气压力为7BAR,但实际供气压力必须参考执行器所容许的最大气源压力)。
2.接通4---20mA输入信号。
(定位器的工作电源取自输入信号,由DCS二线制供电,不能将DC24V直接加至定位器,否则有可能损坏定位器电路)。
3.检查位置返馈杆的安装角度(如定位器与执行器整体供货,则已经由执行器供货商安装调试完毕,只需作检查确认,该步并非必须):•按住MODE键。
•并同时点击⇧或⇩键,直到操作模式代码1.3显示出来。
•松开 MODE键。
•使用⇧或⇩键操作,使执行器分别运行到两个终端位置,记录两终端角度•两个角度应符合下列推荐角度范围(最小角位移20度,无需严格对称)直行程应用范围在 -28º--- +28º 之内。
角行程应用范围在 -57º--- +57º 之内。
全行程角度应不小于25º4.切换至参数配置菜单•同时按住⇧和⇩键•点击ENTER键•等待3秒钟,计数器从3计数到0•松开⇧和⇩键程序自动进入P1.0配置菜单。
5.使用⇧和⇩键选择定位器安装形式为直行程或角行程。
角行程安装形式:定位器没有返馈杆,其返馈轴与执行器角位移输出轴同轴心一般角位移为90º直行程安装形式:定位器必须通过返馈杆驱动定位器的转动轴,一般定位器的返馈杆角位移小于60º, 用于驱动直行程阀门气动执行器。
注意:进行自动调整之前,请确认实际安装形式是否与定位器菜单所选形式相符,因为自动调整过程中定位器对执行器行程终端的定义方法不同,且线性化校正数据库不同,可能导致较大的非线性误差。
TZID-C智能化定位器使用说明书42/18-64 CH 4.0bNGM6螺丝M5螺丝0 简要操作说明阅读并遵守这些操作说明书第1章中的安全指示。
注意机械安装参见折页图气动连接·连接空气供应与进口端。
空气供应范围应在1.4至6巴之间(20至90 psi)。
注意:不得超过执行器的最大压力!·连接执行器供应与OUT1端口(对双作用执行器还需连接OUT2端口)。
电气连接·按照下列端子名称进行电气连接:模拟输入, 4...20 mA信号模拟输出, 位置反馈,4...20 mA信号*数字位置反馈,SW1 *数字位置反馈,SW2 *数字输入数字输出,报警触点数字位置反馈组件,极限2*数字位置反馈组件,极限1*关机模块*数字位置反馈组件,24 V微型开关,极限1,NC触点*数字位置反馈组件,24 V微型开关,极限1,NO触点*数字位置反馈组件,24 V微型开关,极限1,输入*数字位置反馈组件,24 V微型开关,极限2,NC触点*数字位置反馈组件,24 V微型开关,极限2,NO触点*数字位置反馈组件,24 V微型开关,极限2,输入** 选项a 简要操作说明42/18-64-4 CN调试1. 打开定位器的空气供应。
2. 把4...20 mA模拟输入信号施加在定位器上。
3. 检查安装是否正确:- 按住MODE。
- 此外,短暂地按下或,直至显示模式1.3(在传感器范围内手动调节)。
- 放开MODE。
- 按下或,使执行器移动到其机械限位挡块处(两个方向),并记录数值。
旋转角度以度数表示。
建议采用的限位挡块位置:> -28°且< +28°,对于直线式执行器> -57°且< +57°,对于旋转式执行器最小角度:25°4. 切换到配置级别:- 同时按住和。
- 此外,短暂地按下ENTER。
- 等待,直至从3到0的倒数完成。
- 放开和。
TZID-C 智能定位器安装及操作说明书(修订版)ABB (中国)自动化有限公司仪器仪表总部Tel: 010 8456 6688 F ax: 010 8456 7650气路连接•使用与定位器气源端口处标识的标准接口连接气源气源的要求:仪表气体(无油、无尘、无水,符合DIN / ISO8573-1污染及含油三级标准,最大颗粒直径< 5um,且含量<5mg/m3,油滴<1mg/m3。
露点温度低于工作温度10k。
•连接定位器的输出与气动执行器的气缸电气连接根据下列接线端子图以及设计要求进行相应的配线(一般只需+11,-12,+31,-32)调试步骤1.接通气源前,先将气源管放空一段时间以排除管路中可能存在的灰尘、杂质、水、油等。
建议放空时间30分钟,可以用手或者白纸、白布进行气源质量的检查。
声明:如由于灰尘、杂质、水、油等造成定位器的损坏,ABB将不提供质保。
检查减压阀后压力是否符合执行器的铭牌参数要求(定位器的最大供气压力为6 BAR,但实际供气压力必须参考执行器所容许的最大气源压力)。
2.接通4---20mA输入信号。
(定位器的工作电源取自输入信号,由DCS二线制供电,不能将DC24V直接加至定位器,否则有可能损坏定位器电路)。
3.检查位置返馈杆的安装角度(如定位器与执行器整体供货,则已经由执行器供货商安装调试完毕,只需作检查确认,该步并非必须):•按住MODE键。
•并同时点击⇧或⇩键,直到操作模式代码1.3显示出来。
•松开 MODE键。
•使用⇧或⇩键操作,使执行器分别运行到两个终端位置,记录两终端角度•两个角度应符合下列推荐角度范围(最小角位移20度,无需严格对称)直行程应用范围在 -28º--- +28º之内。
角行程应用范围在 -57º--- +57º之内。
(在1.3开时要按⇧键同时按⇩键看角行程在最大开度时是否接近-45º左右,按⇩键同时按⇧键看最小开度是否在20度左右的角度范围)全行程角度应不小于25º若不是以上角度范围,则用小螺丝刀细调转角挡圈4.切换至参数配置菜单•点击ENTER键•等待3秒钟,计数器从3计数到0•松开⇧和⇩键程序自动进入P1.0配置菜单。
![ABB智能定位器TZID-C说明书(中文版)[1]](https://uimg.taocdn.com/a9388014b9d528ea80c77906.webp)
ABB TZID-C智能定位器安装及操作说明书(仅供调试维修人员使用参考)※气动连接·使用与定位器气源端口处标识的标准接口连接气源·连接定位器的输出与气动执行器的气缸※电气连接根据下列接线端子图以及设计要求进行相应的配线(一般只需+11,-12,+31,-32)※调试步骤1.接通气源,检查减压阀后压力是否符合执行器的铭牌参数要求(定位器的最大供气压力为0.7MPa,但实际供气压力必须参考执行器所容许的最大气源压力,标准工作气源压力0.3MPa);2.接通4---20mA输入信号。
(定位器的工作电源取自输入信号,由DCS二线制供电,端电压为DC8.7V左右,不能将DC24V直接加至定位器,否则有可能损坏定位器电路);3.检查位置反馈杆的安装角度(如定位器与执行器整体供货,则由执行器供货商安装调试完毕,只需作检查确认,该步并非必须):·按住MODE键·同时点击↑或↓键,直到操作模式代码1.3显示出来·松开MODE键。
·使用↑或↓键操作,使执行器分别运行到两个终端位置,记录两终端角度。
·两个角度应符合下列推荐角度范围(最小角位移20度;无需严格对称)直行程(小角度)应用在-28°---+28°之内。
角行程(大角度)应用在-57°---+57°之内。
全行程角度应不小于25°4. 启动自动调整程序方法一·按住MODE键·同时点击↑或↓键,直到操作模式代码1.1显示出来根据变换角度不同,分别选择MODE键或ENTER键进行自动整定;直行程(小角度):·按住MODE键直到显示ADJ-LIN,然后松开该键,·再按住MODE键3秒直到计数器倒数到0,·松开MODE键,自动调整程序开始运行(显示正在进行的程序语句号)。
·自动调整程序顺利结束后,系统参数会被自动存储。
A B B T Z I D-C智能定位器安装及操作说明书气动连接.使用与定位器源端口处标识的标准接口连接气源.连接定位器的输出与气动执行器的气缸电气连接根据下列接线端子图以及设计要求进行相应的配线(一般只需+11,-12,+31,-32)1.接通气源,检查减压阀后压力是否符合执行器的铭牌参数要求(定位器的最大供气压力为7BAR,但实际供气压力必须参考执行器所容许的最大气源压力)2.接通4---20mA输入信号。
(定位器的工作电源取自输出信号,由DCS二线制供电,不能将DC24V直接加至定位器,否则有可能损坏定位器电路)。
3.检查位置反馈杆的安装角度(如定位器与执行器整体供货,则由执行器供货商安装调试完毕,只需作检查确认,该步并非必须):.按住MOSE键.并同时点击□或□键,直到操作模式代码1.3显示出来.松开MODE键。
.使用□或□键操作,使执行器分别运行到两个终端位置,记录两终端角度。
.两个角度应符合下列推荐角度范围(最小角位移20度;无需严格对称)直行程应用在-28°---+28°之内。
角行程应用在-28°---+28°之内。
全行程角度应不小于25°4.切换至参数配置菜单.同时按住□和□键.点击ENTER键.等待3秒钟,计数器从3计数到0、.松开□和□键程序自动进入P1.0配置菜单5.使用□和□键选择定位器安装形式为直行程或角行程。
角行程安装形式:定位器没有反馈杆,其反馈轴与执行器角位移输出轴同轴心一般角位移为90°直行程安装形式:定位器必须通过反馈杆驱动定位器的转动轴,一般定位器的反馈杆角位移小于60°,用于驱动直行程阀门启动执行器。
注意:进行自动调整之前,请确认实际安装形式是否与定位器菜单所选形式相符,因为自动调整过程中定位器对执行器行程终端的定义方法不通,且线性化校正数据库不同,可能导致较大的非线性误差。
6.启动自动调整程序(执行器或阀门安装于系统后最好通过此程序重新整定);.按住MODE键.点击□键一次或多次,直到显示出“P1.1”.松开MODE键.按住ENTER键3秒直到计数器倒数到0.松开ENTER键,自动调整程序开始运行(显示正在进行的程序语句号)。
A B B T Z I D-C智能定位器安装及操作说明书气动连接.使用与定位器源端口处标识的标准接口连接气源.连接定位器的输出与气动执行器的气缸电气连接根据下列接线端子图以及设计要求进行相应的配线(一般只需+11,-12,+31,-32)1.接通气源,检查减压阀后压力是否符合执行器的铭牌参数要求(定位器的最大供气压力为7BAR,但实际供气压力必须参考执行器所容许的最大气源压力)2.接通4---20mA输入信号。
(定位器的工作电源取自输出信号,由DCS二线制供电,不能将DC24V直接加至定位器,否则有可能损坏定位器电路)。
3.检查位置反馈杆的安装角度(如定位器与执行器整体供货,则由执行器供货商安装调试完毕,只需作检查确认,该步并非必须):.按住MOSE键.并同时点击□或□键,直到操作模式代码1.3显示出来.松开MODE键。
.使用□或□键操作,使执行器分别运行到两个终端位置,记录两终端角度。
.两个角度应符合下列推荐角度范围(最小角位移20度;无需严格对称)直行程应用在-28°---+28°之内。
角行程应用在-28°---+28°之内。
全行程角度应不小于25°4.切换至参数配置菜单.同时按住□和□键.点击ENTER键.等待3秒钟,计数器从3计数到0、.松开□和□键程序自动进入P1.0配置菜单5.使用□和□键选择定位器安装形式为直行程或角行程。
角行程安装形式:定位器没有反馈杆,其反馈轴与执行器角位移输出轴同轴心一般角位移为90°直行程安装形式:定位器必须通过反馈杆驱动定位器的转动轴,一般定位器的反馈杆角位移小于60°,用于驱动直行程阀门启动执行器。
注意:进行自动调整之前,请确认实际安装形式是否与定位器菜单所选形式相符,因为自动调整过程中定位器对执行器行程终端的定义方法不通,且线性化校正数据库不同,可能导致较大的非线性误差。
6.启动自动调整程序(执行器或阀门安装于系统后最好通过此程序重新整定);.按住MODE键.点击□键一次或多次,直到显示出“P1.1”.松开MODE键.按住ENTER键3秒直到计数器倒数到0.松开ENTER键,自动调整程序开始运行(显示正在进行的程序语句号)。
TZID-C 智能定位器安装及操作说明书MOTOYAMA ENG. WORKS LTD本山製作所株式 会社气路连接•使用与定位器气源端口处标识的标准接口连接气源•连接定位器的输出与气动执行器的气缸电气连接根据下列接线端子图以及设计要求进行相应的配线(一般只需+11,-12,+31,-32)调试步骤1.接通气源,检查减压阀后压力是否符合执行器的铭牌参数要求(定位器的最大供气压力为7BAR,但实际供气压力必须参考执行器所容许的最大气源压力)。
2.接通4---20mA输入信号。
(定位器的工作电源取自输入信号,由DCS二线制供电,不能将DC24V直接加至定位器,否则有可能损坏定位器电路)。
3.检查位置返馈杆的安装角度(如定位器与执行器整体供货,则已经由执行器供货商安装调试完毕,只需作检查确认,该步并非必须):•按住MODE键。
•并同时点击⇧或⇩键,直到操作模式代码1.3显示出来。
•松开 MODE键。
•使用⇧或⇩键操作,使执行器分别运行到两个终端位置,记录两终端角度•两个角度应符合下列推荐角度范围(最小角位移20度,无需严格对称)直行程应用范围在 -28º--- +28º 之内。
角行程应用范围在 -57º--- +57º 之内。
全行程角度应不小于25º4.切换至参数配置菜单•同时按住⇧和⇩键•点击ENTER键•等待3秒钟,计数器从3计数到0•松开⇧和⇩键程序自动进入P1.0配置菜单。
5.使用⇧和⇩键选择定位器安装形式为直行程或角行程。
角行程安装形式:定位器没有返馈杆,其返馈轴与执行器角位移输出轴同轴心一般角位移为90º直行程安装形式:定位器必须通过返馈杆驱动定位器的转动轴,一般定位器的返馈杆角位移小于60º, 用于驱动直行程阀门气动执行器。
注意:进行自动调整之前,请确认实际安装形式是否与定位器菜单所选形式相符,因为自动调整过程中定位器对执行器行程终端的定义方法不同,且线性化校正数据库不同,可能导致较大的非线性误差。
TZID-C 智能定位器安装及操作说明书ABB (中国)自动化有限公司仪器仪表总部Tel************Fax************气路连接•使用与定位器气源端口处标识的标准接口连接气源•连接定位器的输出与气动执行器的气缸电气连接根据下列接线端子图以及设计要求进行相应的配线(一般只需+11,-12,+31,-32)调试步骤1.接通气源,检查减压阀后压力是否符合执行器的铭牌参数要求(定位器的最大供气压力为7BAR,但实际供气压力必须参考执行器所容许的最大气源压力)。
2.接通4---20mA输入信号。
(定位器的工作电源取自输入信号,由DCS二线制供电,不能将DC24V直接加至定位器,否则有可能损坏定位器电路)。
3.检查位置返馈杆的安装角度(如定位器与执行器整体供货,则已经由执行器供货商安装调试完毕,只需作检查确认,该步并非必须):•按住MODE键。
•并同时点击⇧或⇩键,直到操作模式代码1.3显示出来。
•松开 MODE键。
•使用⇧或⇩键操作,使执行器分别运行到两个终端位置,记录两终端角度•两个角度应符合下列推荐角度范围(最小角位移20度,无需严格对称)直行程应用范围在 -28º--- +28º 之内。
角行程应用范围在 -57º--- +57º 之内。
全行程角度应不小于25º4.切换至参数配置菜单•同时按住⇧和⇩键•点击ENTER键•等待3秒钟,计数器从3计数到0•松开⇧和⇩键程序自动进入P1.0配置菜单。
5.使用⇧和⇩键选择定位器安装形式为直行程或角行程。
角行程安装形式:定位器没有返馈杆,其返馈轴与执行器角位移输出轴同轴心一般角位移为90º直行程安装形式:定位器必须通过返馈杆驱动定位器的转动轴,一般定位器的返馈杆角位移小于60º, 用于驱动直行程阀门气动执行器。
注意:进行自动调整之前,请确认实际安装形式是否与定位器菜单所选形式相符,因为自动调整过程中定位器对执行器行程终端的定义方法不同,且线性化校正数据库不同,可能导致较大的非线性误差。
TZID-C 智能定位器安装及操作说明书(修订版)ABB (中国)自动化有限公司仪器仪表总部Tel************F ax************气路连接•使用与定位器气源端口处标识的标准接口连接气源气源的要求:仪表气体(无油、无尘、无水,符合DIN / ISO8573-1污染及含油三级标准,最大颗粒直径< 5um,且含量<5mg/m3,油滴<1mg/m3。
露点温度低于工作温度10k。
•连接定位器的输出与气动执行器的气缸电气连接根据下列接线端子图以及设计要求进行相应的配线(一般只需+11,-12,+31,-32)调试步骤1.接通气源前,先将气源管放空一段时间以排除管路中可能存在的灰尘、杂质、水、油等。
建议放空时间30分钟,可以用手或者白纸、白布进行气源质量的检查。
声明:如由于灰尘、杂质、水、油等造成定位器的损坏,ABB将不提供质保。
检查减压阀后压力是否符合执行器的铭牌参数要求(定位器的最大供气压力为6 BAR,但实际供气压力必须参考执行器所容许的最大气源压力)。
2.接通4---20mA输入信号。
(定位器的工作电源取自输入信号,由DCS二线制供电,不能将DC24V直接加至定位器,否则有可能损坏定位器电路)。
3.检查位置返馈杆的安装角度(如定位器与执行器整体供货,则已经由执行器供货商安装调试完毕,只需作检查确认,该步并非必须):•按住MODE键。
•并同时点击⇧或⇩键,直到操作模式代码1.3显示出来。
•松开 MODE键。
•使用⇧或⇩键操作,使执行器分别运行到两个终端位置,记录两终端角度•两个角度应符合下列推荐角度范围(最小角位移20度,无需严格对称)直行程应用范围在 -28º--- +28º之内。
角行程应用范围在 -57º--- +57º之内。
(在1.3开时要按⇧键同时按⇩键看角行程在最大开度时是否接近-45º左右,按⇩键同时按⇧键看最小开度是否在20度左右的角度范围)全行程角度应不小于25º若不是以上角度范围,则用小螺丝刀细调转角挡圈4.切换至参数配置菜单•点击ENTER键•等待3秒钟,计数器从3计数到0•松开⇧和⇩键程序自动进入P1.0配置菜单。
TZID-C 智能定位器安装及操作说明书ABB (中国)自动化有限公司仪器仪表总部Tel************Fax************气路连接•使用与定位器气源端口处标识的标准接口连接气源•连接定位器的输出与气动执行器的气缸电气连接根据下列接线端子图以及设计要求进行相应的配线(一般只需+11,-12,+31,-32)调试步骤1.接通气源,检查减压阀后压力是否符合执行器的铭牌参数要求(定位器的最大供气压力为7BAR,但实际供气压力必须参考执行器所容许的最大气源压力)。
2.接通4---20mA输入信号。
(定位器的工作电源取自输入信号,由DCS二线制供电,不能将DC24V直接加至定位器,否则有可能损坏定位器电路)。
3.检查位置返馈杆的安装角度(如定位器与执行器整体供货,则已经由执行器供货商安装调试完毕,只需作检查确认,该步并非必须):•按住MODE键。
•并同时点击⇧或⇩键,直到操作模式代码1.3显示出来。
•松开 MODE键。
•使用⇧或⇩键操作,使执行器分别运行到两个终端位置,记录两终端角度•两个角度应符合下列推荐角度范围(最小角位移20度,无需严格对称)直行程应用范围在 -28º--- +28º 之内。
角行程应用范围在 -57º--- +57º 之内。
全行程角度应不小于25º4.切换至参数配置菜单•同时按住⇧和⇩键•点击ENTER键•等待3秒钟,计数器从3计数到0•松开⇧和⇩键程序自动进入P1.0配置菜单。
5.使用⇧和⇩键选择定位器安装形式为直行程或角行程。
角行程安装形式:定位器没有返馈杆,其返馈轴与执行器角位移输出轴同轴心Page 2 of 9一般角位移为90º直行程安装形式:定位器必须通过返馈杆驱动定位器的转动轴,一般定位器的返馈杆角位移小于60º, 用于驱动直行程阀门气动执行器。
注意:进行自动调整之前,请确认实际安装形式是否与定位器菜单所选形式相符,因为自动调整过程中定位器对执行器行程终端的定义方法不同,且线性化校正数据库不同,可能导致较大的非线性误差。
A B B T Z I D-C智能定位器安装及操作说明书气动连接.使用与定位器源端口处标识的标准接口连接气源.连接定位器的输出与气动执行器的气缸电气连接根据下列接线端子图以及设计要求进行相应的配线(一般只需+11,-12,+31,-32)1.2.否则有可能3.该步并非必须):45. 使用□和□键选择定位器安装形式为直行程或角行程。
角行程安装形式:定位器没有反馈杆,其反馈轴与执行器角位移输出轴同轴心一般角位移为90°直行程安装形式:定位器必须通过反馈杆驱动定位器的转动轴,一般定位器的反馈杆角位移小于60°,用于驱动直行程阀门启动执行器。
注意:进行自动调整之前,请确认实际安装形式是否与定位器菜单所选形式相符,因为自动调整过程中定位器对执行器行程终端的定义方法不通,且线性化校正数据库不同,可能导致较大的非线性误差。
6. 启动自动调整程序(执行器或阀门安装于系统后最好通过此程序重新整定);.按住MODE键.点击□键一次或多次,直到显示出“P1.1”.松开MODE键.按住ENTER键3秒直到计数器倒数到0.松开ENTER键,自动调整程序开始运行(显示正在进行的程序语句号)。
.自动调整程序顺利结束后,显示器显示“COMPLETE”。
在自动调整过程中如果遇到故障,程序将被迫终止并显示出故障代码,根据故障代码即可检查故障原因,也可以人为地强制中断自动调整程序。
7.如有必要,进入“P1.2”调整控制偏差带(或称死区)8.如有必要,进入“P1.3”测试设定效果。
9.存储设定效果:.按住MODE键.点击□键一次或多次,直到显示出“. P1.4“.松开MODE键.用□或□键选择NV_SAVE(若选择“CANCEL”,此前所作修改将不寻存储。
.按住ENTER键3秒直到计数器倒计数结束后松开1.01.11.21.3. 松开MODE键.显示器显示反馈杆所处角度位置如“-15.0°SENS_POS”.使用□或□键进行手动控制。
-------------TZID-C 智能定位器安装及操作说明书(修订版)ABB (中国)自动化有限公司仪器仪表总部Tel: 010 8456 6688 F ax: 010 8456 7650-------------气路连接∙使用与定位器气源端口处标识的标准接口连接气源气源的要求:仪表气体(无油、无尘、无水,符合DIN / ISO8573-1污染及含油三级标准,最大颗粒直径< 5um,且含量<5mg/m3,油滴<1mg/m3。
露点温度低于工作温度10k。
∙连接定位器的输出与气动执行器的气缸电气连接根据下列接线端子图以及设计要求进行相应的配线(一般只需+11,-12,+31,-32)调试步骤1.接通气源前,先将气源管放空一段时间以排除管路中可能存在的灰尘、杂质、水、油等。
建议放空时间30分钟,可以用手或者白纸、白布进行气源质量的检查。
声明:如由于灰尘、杂质、水、油等造成定位器的损坏,ABB将不提供质保。
检查减压阀后压力是否符合执行器的铭牌参数要求(定位器的最大供气压力为6 BAR,但实际供气压力必须参考执行器所容许的最大气源压力)。
2.接通4---20mA输入信号。
(定位器的工作电源取自输入信号,由DCS二线制供电,不能将DC24V直接加至定位器,否则有可能损坏定位器电路)。
3.检查位置返馈杆的安装角度(如定位器与执行器整体供货,则已经由执行器供货商安装调试完毕,只需作检查确认,该步并非必须):∙按住MODE键。
∙并同时点击⇧或⇩键,直到操作模式代码1.3显示出来。
∙松开 MODE键。
∙使用⇧或⇩键操作,使执行器分别运行到两个终端位置,记录两终端角度∙两个角度应符合下列推荐角度范围(最小角位移20度,无需严格对称)直行程应用范围在 -28º--- +28º之内。
角行程应用范围在 -57º--- +57º之内。
全行程角度应不小于25º4.切换至参数配置菜单∙同时按住⇧和⇩键∙点击ENTER键∙等待3秒钟,计数器从3计数到0∙松开⇧和⇩键程序自动进入P1.0配置菜单。
产品信息用于过程自动化的智能阀门定位器TZID, TZIDC, TZIDC110, TZIDC120, TZIDC200系列仪器仪表——解决方案BA用于过程自动化的智能阀门定位器TZID, TZIDC, TZIDC110, TZIDC120, TZIDC200系列公司简介ABB公司是一家总部设在瑞士苏黎世的超大型著名跨国集团,系由瑞典的ASEA集团与位于瑞士巴登市的BBC集团公司于1988年合并而成。
ABB现有17万多雇员,5000多个分支机构遍布140多个国家,主要业务为工业自动化、发电、输配电以及金融服务等。
99年1月11日,年销售额逾20亿美元的ElsagBailey过程自动化集团正式加入ABB集团。
ElsagBailey拥有诸如BaiIey、Fischer&Porter、TBI、Hartmann&Braun等一批知名的自动化产品制造商和品牌。
通过ABB和EB的有力合并,ABB集团因此成为世界电气与自动化领域无可争辩的双料巨人。
其中在自动化领域已处于显著的全球领先地位,拥有85亿美元的年销额、45000多名员工,在45个国家共有1000多家分公司。
ABB在中国设有1个控股公司、1个独资公司、22个代表处和22个合资企业,共有员工5500多人。
ABB连续几年被有影响的杂志和咨询公司评为管理最佳公司,ABB的战略是集中全球优势满足当地客户的需求。
我们相信ABB能够为客户提供最好的“价值”。
而我们之所以能够提供“价值”完全基于 ABB在石油、化工、电力、冶金、造纸、建材等各种工业领域的详尽的过程自动化知识,项目管理技术及财政金融方面的力量,这些使得我们能够完成每一浩大繁杂的综合工程。
拥有世界领先的研发技术和优异性能,德同Hartmann&Braun(哈德曼.布朗,简称H&B公司)早在40年以前,就开始向中国提供其高效的电动执行机构和电气阀门定位器。
1999年H&B随Elsag Bailey过程自动化集团正式并入ABB集团,由于采用了最先进的微处理数字信号过程转换、控制和数字通讯技术,加上“德国造”的高精度(最高到0.1%),高传动效率、和高可靠性(重庆电厂曾经连续无故障运行近20年),使得ABB电动执行机构和智能电气阀门定位器在许多项目成套时,都在关键部位被广泛选用却并不被留意其是ABB的品牌产品。
三按钮式TZID-C 智能定位器安装及操作说明书一、预先检查1.检查气源是否符合要求,并按下过滤器下的排污按钮,进行排污。
2.检查接线,确保输入信号符合要求。
3.检查安装在气动门上的定位器反馈轴的转动角度符合要求。
4.手动检查气动门动作的灵活性。
5.查看定位器铭牌。
确认定位器的单双向、直行程或角行程、保位。
二、调试1.将气动门摇至自动位。
看阀门是正作用还示反作用。
正作用把阀门打开,反作用把阀门关闭。
2.首先送气源。
调节供气压力调节螺栓到较小值,打开供气阀,旋动供气压力调节螺栓,观察气动门进气压力表,将进气压力调至1.4~6.0bar(20~90Psi)。
3.送4~20mA DC电源信号。
4.气动门定位器送电后,LCD会先显示在Operation level 1状态下的模式序号,然后显示该模式下的当前值。
5.在Operation level 1状态下,按住并保持↑↓键,点按RESET键,LCD显示倒数3→0完毕,放开↑↓键,进入Operation level 2状态;在Operation level2 状态下,点按RESET键即进入Operation level 1状态。
6.旋转mode旋转开关可选择1.0~1.3或2.0~2.3进行参数设定。
Operation level 1:1.0自适控制1.1稳定控制1.2手动1.3设置报警开关Operation level 2:2.0 自动冲程2.1 死区调节2.2 量程2.3 零点调整该程序启动后,定位器自动运动阀门,设定与阀门相关数据,并储存在定位器中。
在程序运行时,LCD显示10、11、12┉┉200,表明程序运行的每个步骤。
该程序运行完,气动调门既按所存储参数运行。
7.启动2.0自动冲程程序(Autostroke)。
在2.0模式下同时按住↑、↓键,LCD显示倒数3→0完毕后,放开↑、↓键,程序被启动。
8.自动冲程程序结束后,LCD显示闪烁的符号“←:”,在此情况下,1)长按RESET键,LCD显示倒数3→0后,显示“EEP”,表明自动冲程程序新设定的参数有效并储存。
TZID-C 智能定位器
安装及操作说明书(修订版)
ABB (中国)自动化有限公司仪器仪表总部
Tel************F ax************
气路连接
•使用与定位器气源端口处标识的标准接口连接气源
气源的要求:仪表气体(无油、无尘、无水,符合DIN / ISO8573-1污染及含油三
级标准,最大颗粒直径< 5um,且含量<5mg/m3,油滴<1mg/m3。
露点温度低于工作
温度10k。
•连接定位器的输出与气动执行器的气缸
电气连接
根据下列接线端子图以及设计要求进行相应的配线(一般只需+11,-12,+31,-32)
调试步骤
1.接通气源前,先将气源管放空一段时间以排除管路中可能存在的灰尘、杂质、水、油等。
建议放空时间30分钟,可以用手或者白纸、白布进行气源质量的检查。
声明:如由于灰尘、杂质、水、油等造成定位器的损坏,ABB将不提供质保。
检查减压阀后压力是否符合执行器的铭牌参数要求(定位器的最大供气压力为6 BAR,但实际供气压力必须参考执行器所容许的最大气源压力)。
2.接通4---20mA输入信号。
(定位器的工作电源取自输入信号,由DCS二线制供电,不能将
DC24V直接加至定位器,否则有可能损坏定位器电路)。
3.检查位置返馈杆的安装角度(如定位器与执行器整体供货,则已经由执行器供货商安装调
试完毕,只需作检查确认,该步并非必须):
•按住MODE键。
•并同时点击⇧或⇩键,直到操作模式代码1.3显示出来。
•松开 MODE键。
•使用⇧或⇩键操作,使执行器分别运行到两个终端位置,记录两终端角度
•两个角度应符合下列推荐角度范围(最小角位移20度,无需严格对称)
直行程应用范围在 -28º--- +28º之内。
角行程应用范围在 -57º--- +57º之内。
全行程角度应不小于25º
4.切换至参数配置菜单
•同时按住⇧和⇩键
•点击ENTER键
•等待3秒钟,计数器从3计数到0
Page 2 of 10
•松开⇧和⇩键
程序自动进入P1.0配置菜单。
5.使用⇧和⇩键选择定位器安装形式为直行程或角行程。
角行程安装形式(rotary):定位器没有返馈杆,其返馈轴与执行器角位移输出轴同轴
心, 一般角位移为90º
直行程安装形式(linear):定位器必须通过返馈杆驱动定位器的转动轴,一般定位器
的返馈杆角位移小于60º, 用于驱动直行程阀门气动执行器。
注意:进行自动调整之前,请确认实际安装形式是否与定位器菜单所选形式相符,因为自动调整过程中定位器对执行器行程终端的定义方法不同,且线性化校正数据库不同,可能导致较大的非线性误差。
出厂时的缺省设置为:linear
6.启动自动调整程序(执行器或阀门安装于系统后最好通过此程序重新整定):
方法1:
•按住MODE键
•点击⇧键一次或多次,直到显示出“P1.1”
•松开MODE键
•按住ENTER键直到计数器倒计数到0
•松开ENTER键,自动调整程序开始运行(显示器显示正在进行的程序语句号)。
•自动调整程序顺利结束后,显示器显示“COMPLETE”。
•参见步骤10,进行手动存储上述自动调整得到的参数。
方法2(推荐):
•按住MODE键(linear安装形式)或者ENTER(rotary安装形式)键3秒,直到出现“O o”
•松开MODE键(linear安装形式)或者ENTER(rotary安装形式)
•按住MODE键(linear)或者ENTER(rotary)键直到计数器倒计数到0
•松开MODE键(linear)或者ENTER(rotary)键,自动调整程序开始运行(显示器显示正在进行的程序语句号)。
•自动调整程序顺利结束后,会自动存储上述自动调整得到的参数,并自动切换控制方式到1.1 CTRL_FIX
在自动调整过程中如果遇到故障,程序将被迫终止并显示出故障代码,根据故障代码即可检查出故障原因。
也可以人为地强制中断自动调整程序。
7.如有必要,进入“P1.2”调整控制偏差带
8.如有必要,进入“P1.3”调整控制死区
9.如有必要,进入“P1.4”测试设定效果。
10.存储设定结果:
•按住MODE键
•点击⇧键一次或多次,直到显示出“P1.5”
•松开MODE键
•用⇧或⇩键选择 NV_SAVE (若选择‘CANCEL’,此前所作修改将不予存储。
)
•按住ENTER 键3秒直到计数器倒计数结束后松开
前面所进行的设定和自动调整中所测得的参数将存储在EEPROM 中,定位器转换到先前所选择的运行级操作模式。
运行级操作模式的选择
1.0模式:自适应控制模式
•按住MODE键
•点击⇧键一次或多次,直到显示出“1.0 CTRL_ADP”
•松开MODE键
•显示器显示阀位百分数如“50.0% POSITION”
1.1模式:固定控制模式
•按住MODE键
•点击⇧键一次或多次,直到显示出“1.1 CTRL_FIX”
•松开MODE键
•显示器显示阀位百分数如“50.0% POSITION”
1.2 模式:在执行器的实际全行程范围内手动控制
•按住MODE键
•点击⇧键一次或多次,直到显示出“1.2 MANUAL”
•松开MODE键
•显示器显示阀位百分数如“50.0% POSITION”
•使用⇧或⇩键进行手动控制。
先按住⇧键,再按住⇩键(始终按住⇧键),执行器将快速开启
先按住⇩键,再按住⇧键(始终按住⇩键),执行器将快速关闭
1.3 模式:在定位器的检测范围内手动控制
•按住MODE键
•点击⇧键一次或多次,直到显示出“1.3 MAN_SENS”
•松开MODE键
•显示器显示返馈杆所处角度位置如“-15.0ºSENS_POS”
•使用⇧或⇩键进行手动控制。
先按住⇧键,再按住⇩键,执行器将快速开启
先按住⇩键,再按住⇧键,执行器将快速关闭
请参阅附后功能表总图
参数设定举例:将阀门的正作用改为反作用
(定位器初始设定适合于正作用阀门,如实际驱动的阀门为反作用型式即阀杆上行
关闭阀门,则需确认P2.3=Reverse)
一般的阀门出厂之前已经修改此参数无需用户再修改,但可以通过下述方法检查。
定位器起始位置可以是运行模式中的任意方式
1.切换至配置功能菜单
•同时按住⇧和⇩键
•点击ENTER键
•等待3秒钟,计数器从3倒计数至0
•松开⇧和⇩键
•显示器显示“P1.0 ACTUATOR”
2.从配置功能菜单中选择第二组参数
•同时按住MODE和ENTER两键
•点击⇧键
•显示器显示“P2._ SETPOINT”
•松开 MODE和ENTER两键
•显示器显示“P2.0 MIN_PGE”
3.从第二组配置参数中选择阀门作用方式P2.3
•按住MODE键
•点击⇧键3次
•显示器显示“P2.3 ACTION”
•松开MODE键
4.更改阀门作用方式
•点击⇧键选择“REVERSE”
5.切换至“P2.7 EXIT” 存储并退出(如软件版本是2.0以上,则切换“P2.8 EXIT”)
•按住MODE键
•点击⇧键多次直至显示器显示“P2.7 EXIT”
•松开MODE键
•用⇧或⇩键选择 NV_SAVE
•按住ENTER 键直到计数器倒计数结束后松开
前面所进行的设定和自动调整中所测得的参数将存储在EEPROM 中,定位器转换到先前所选择的运行模式.
TZID-C 系列智能定位器程序功能图解:
1.功能级分类:
运行操作级:适用于初次调试及日常维护中的检查或现场开关操作
参数配置级:适用于初次调试中的参数设置及整定
2.
太快,控制发生振荡时选择1.0控制模式,但其控制精度较低。
操作模式中的1.2和1.3均可运用键盘开启或关闭执行器,但1.2专用于手操,而
1.3专用于检测定位器返馈杆实际运行范围是否超出传感器的最大检测范围,以便校正返
馈杆的连接,取得最佳的控制效果。
3.参数配置级
参数配置共分11组,用P1._,P2._---P11._(P为PARAMETER首字母) 表示,而每一组又分若干项,如P1._ 分P1.0,P1.1,---P1.4共5项, P2._分P2.0,P2.1, ----P2.7共8项。
有些项中又可分若干分项以供选择,如P1.0中可选择LINEAR用于直行程执行器,选择ROTORY用于角行程执行器。
又如P1.4 EXIT中可选择NV_SAVE(Non-V olatile save)存盘退出或CANCEL 不存盘退出。
有些项中只有数值以供调整,如分程调节中给定信号为4—12 mA ,则P2.0 中的数值应设为4 mA ,而P2.1中的数值应设为12mA. 如给定信号为4—12 mA ,则P2.0 中的数值应设为12 mA ,而P2.1中的数值应设为20mA.。