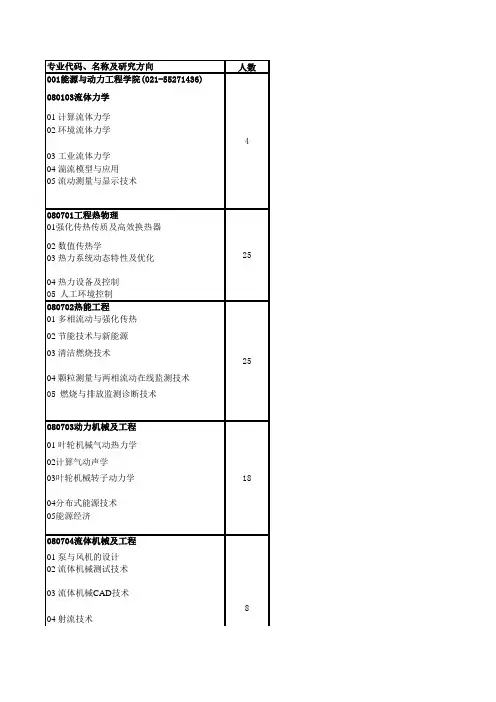
上海理工大学控制系导师研究方向
- 格式:doc
- 大小:71.00 KB
- 文档页数:4
自动化教指委成员自动化教指委成员是指由自动化领域的专家和学者组成的教学指导委员会,旨在提供教学和课程设计方面的专业指导和建议。
以下是自动化教指委成员的标准格式文本:自动化教指委成员介绍:自动化教指委成员是由自动化领域的知名专家和学者组成的委员会。
成员们具有丰富的教学经验和深厚的学术背景,致力于推动自动化教育的发展和提高教学质量。
成员列表:1. 张教授:自动化工程博士,拥有20年的教学经验,研究方向包括控制系统和机器人技术。
2. 李教授:自动化工程博士,曾在国内外知名高校任教,研究兴趣涵盖自动化系统设计和工业自动化。
3. 王教授:自动化工程硕士,研究方向为智能控制和自动化软件开发,拥有丰富的实践经验。
4. 赵教授:自动化工程博士,专注于自动化系统的建模和仿真,已发表多篇相关论文。
5. 刘教授:自动化工程硕士,研究方向为自动化控制和传感器技术,曾获得多项科研奖励。
成员职责:1. 提供教学指导:自动化教指委成员将根据自身专业知识和经验,为教师提供教学指导和建议,提高教学质量和效果。
2. 课程设计评审:成员们将对自动化课程的设计方案进行评审,确保课程内容合理、科学,并满足学生的学习需求。
3. 教材推荐:根据最新的研究成果和教学理念,成员们将推荐适用于自动化课程的教材和参考书籍。
4. 学科发展规划:成员们将参与制定自动化学科的发展规划,提出对学科建设的意见和建议。
5. 学术交流与合作:成员们将积极参与学术会议和研讨会,与国内外同行交流合作,促进自动化教育的国际化发展。
成员选拔与评估:1. 选拔标准:自动化教指委成员的选拔将根据个人的学术背景、教学经验和研究成果等方面进行评估。
2. 任期管理:成员们的任期通常为3年,届满后可根据表现进行续聘或更换。
3. 评估机制:定期对成员的工作进行评估,包括教学质量、学术研究和学科影响力等方面。
总结:自动化教指委成员的成立旨在提供专业的教学指导和建议,促进自动化教育的发展和提高教学质量。
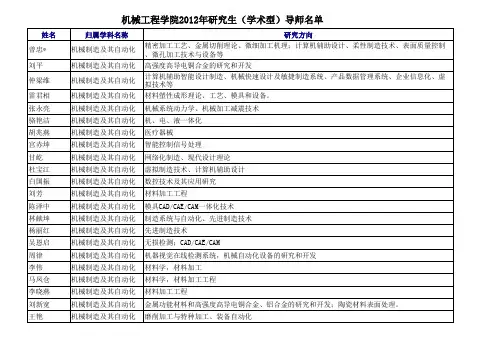
081101控制理论与控制工程
控制理论与控制工程(校级重点建设学科)
研究方向:复杂系统的优化控制与智能决策、模式识别与智能信息处理、嵌入式系统及网络控制、轻工自动化与装备控制
控制理论与控制工程专业现设有四个研究方向:复杂系统的优化控制与智能决策、模式识别与智能信息处理、嵌入式系统及网络控制和轻工自动化与装备控制。
在复杂系统的智能控制与优化决策、模式识别与智能信息处理、嵌入式系统及网络控制、轻工业过程优化控制等领域完成了一批国家级和省部级课题,取得了显著研究成果,获得了国家科技进步二等奖、省部级奖励多项。
本硕士点自1986年获得学位授予权,已经培养硕士毕业生29届,为原轻工业部重点学科,现在学校重点建设学科。
现有专职教师28人,其中教授10人,副教授15人,具有博士学位的教师24人。
控制科学与工程时间:2021.03.09 创作:欧阳法是一门研究控制的理论、方法、技术及其工程 应用的学科。
它是2()世纪最重要的科学理论和成 就之一,它的各阶段的理论发展及技术进步都与生 产和社会实践需求密切相关。
11世纪我国北宋时代 发明的水运仪象台就体现了闭环控制的思想。
到18 世纪,近代工业采用了蒸汽机调速器。
但直到2() 世纪20年代逐步建立了以频域法为主的经典控制 翌途并在工业中获得成功应用,才开始形成一门新 兴的学科——控制科学与工程。
此后,经典控制理 论继续发展并在工业中获得了广泛的应用。
在空间 技术发展的推动下,5()年代又出现了以状态空间法 为主的现代控制理论,并相继发展了若干相对独立 的学科分支,使本学科的理论和研究方法更加丰富。
6()年代以来,随着计算机技术的发展,许多新 方法和技术进入工程化、产品化阶段,显著加快了 工业技术更新的步伐。
在控制科学发展的过程中, 模式识别和人工智能与控制相结合的研究变得更加活跃;由于对大系统的研究和控制学科向社会、经 济系统的渗透,形成了系统工程学科。
特别是近2() 年来,非线性及具有不确定性的复杂系统向“控制 科学与工程”提出了新的挑战,进一步促进了本学 科的迅速发展。
目前,本学科的应用已经適及工 业、农业。
交通、环境、军事、生物、医学、经 济、金融、人口和社会各个领域,从日常生活到社 会经济无不体现本学科的作用。
控制科学以控制论、信息论、系统论为基础, 研究各领域内独立于具体对象的共性问题,即为了 实现某些目标,应该如何描述与分析对象与环境信 息,采取何种控制与决策行为。
它对于各具体应用 领域具有一般方法论的意义,而与各领域具体问题 的结合,又形成了控制工程丰富多样的内容。
本学 科的这一特点,使它对相关学科的发展起到了有力 的推动作用,并在学科交叉与渗透中表现出突出的 活力。
例如:它与信息科学和计算机科学的结合开拓了知识工程和智能机器人领域。
附件2上海理工大学教授简介童正明●上海理工大学能源与动力工程学院教授、原过程装备与控制工程研究所所长●《化学进展》理事●中国化工学会化工机械专业委员会第八届委员●上海化工机械专业委员会副主任●中国内燃机标委会委员(TC177)●中国内燃机学会基础件分会委员会委员●中国工程热物理学会会员●中国化工学会会员主要从事动力工程及节能减排方面的教学和科研。
为汽车及内燃机行业的零部件企业服务30余年,并基于此类实验研究之上拟订了多项行业基础标准,保持在该行业内的广泛合作;2000年~2012年间,和原二炮、九院基地、海装有多项项目合作;在我国脱硫脱硝行业耕耘十余年,目前产品在国内市场属于替代进口产品。
有著作二本:工程燃烧学、工程热力学题解。
完成国家自然科学基金项目二项(89、91)完成上海自然科学基金项目一项(92)完成上海14项难题攻关项目一项(95)杨茉●上海理工大学能源与动力工程学院教授工学博士●热工程研究所所长,原能源与动力工程学院院长●工程热物理博士点学科带头人●曾获全国优秀教师、国务院政府特殊津贴和省有突出贡献专家等荣誉称号●中国工程热物理学会会员●中国民主同盟盟员●教育部高等学校能源动力类专业教学指导委员会委员●中国工程热物理学会传热传质委员会委员●热能与动力工程国家特色专业建设点负责人●传热学国家精品课负责人长期在动力工程与工程热物理领域的教学与科研第一线工作,主要研究领域为流动和传热数值计算技术、流动与传热的非线性特性与混沌、换热器与强化传热、热力系统的优化与运行、及多相流动与传热。
主持完成了5项国家自然科学基金课题及参加完成了国家973科研课题和多项国家自然科学基金课题;主持完成了各种省部级纵向科研课题和来自企业的各种横向应用性科研课题。
在国内外学术刊物和会议发表了400余篇学术论文,6项科研成果分别获省部级科技进步二等奖,获得20余项专利。
获得了上海市领军人才、全国优秀教师、国务院政府特殊津贴、上海市教学名师奖、省级有突出贡献的中青年专业技术人才、市级劳动模范和宝钢教育奖等荣誉。
计算机测量与控制.2022.30(1) 犆狅犿狆狌狋犲狉犕犲犪狊狌狉犲犿犲狀狋牔犆狅狀狋狉狅犾 ·120 ·收稿日期:20210611; 修回日期:20210723。
基金项目:上海市自然科学基金资助项目(15ZR1429300)。
作者简介:杨甲丰(1997),男,江苏南京人,硕士,主要从事现场总线、实时系统方向的研究。
张凤登(1963),男,博士,博士生导师,教授,主要从事现场总线技术、实时控制、汽车电子学等方向的研究。
引用格式:杨甲丰,张凤登,李 明.基于CAN_FD总线的线控制动系统设计[J].计算机测量与控制,2022,30(1):120127.文章编号:16714598(2022)01012008 DOI:10.16526/j.cnki.11-4762/tp.2022.01.019 中图分类号:TP302文献标识码:A基于犆犃犖_犉犇总线的线控制动系统设计杨甲丰,张凤登,李 明(上海理工大学光电信息与计算机工程学院,上海 200082)摘要:针对于汽车单轮制动执行器故障问题,提出了冗余结构系统设计方案和三轮协同制动力分配策略,其中冗余结构系统设计通过双中央控制器,使制动执行器故障时汽车侧向偏移距离缩短,三轮协同制动力分配策略采用汽车行驶速度和驾驶员制动强度相结合的方式,确保汽车在单轮制动执行器故障时可以安全稳定停车;完成了线控制动系统的软硬件设计,搭建了实物验证平台,该平台共设计了6个控制节点,节点之间通过CAN_FD总线进行通信;实验结果表明,在单轮制动执行器故障时,冗余结构系统设计相比于非冗余结构系统设计在不同制动强度下最大缩短了15.85%的侧向偏移距离,三轮协同制动力分配策略可以确保安全稳定停车。
关键词:线控制动;CAN_FD总线;单轮故障;冗余;三轮协同犇犲狊犻犵狀狅犳犅狉犪犽犲-犫狔-狑犻狉犲犛狔狊狋犲犿犅犪狊犲犱狅狀犆犃犖_犉犇YANGJiafeng,ZHANGFengdeng,LIMing(ShanghaiUniversityofScienceandTechnology,Shanghai 200082,China)犃犫狊狋狉犪犮狋:Aimingatthefailureproblemofautomobilesingle-wheelbrakeactuator,thedesignschemeofthere dundantstructuresystemandthedistributionstrategyofthethree-wheelcooperativebrakingforceareproposed.Theredundantstructuresystemisdesignedwithdualcentralcontrollerstoshortenthelateraloffsetdistanceoftheve hiclewhenthebrakeactuatorfails.Thethree-wheelcooperativebrakingforcedistributionstrategycombinesvehicledrivingspeedanddriverbrakingstrengthtoensurethesafeandstableparkingofthevehiclewhenthesingle-wheelbrakeactuatorfails.ThehardwareandsoftwaredesignoftheBrake-by-Wiresystemiscompleted,andthephysicalverificationplatformisbuilt.Inthisplatform,6controlnodesaredesigned,andthenodescommunicatewitheachotherthroughCAN_FD-bus.Theexperimentalresultsshowthatwhenthesingle-wheelbrakeactuatorfails,comparedwiththenon-redundantsystemdesign,theredundantsystemdesigncanshortenthemaximumlateraloff setdistanceby15.85%underdifferentbrakingstrengths,andthethree-wheelcooperativebrakingforcedistributionstrategycanensurethesafeandstablestopping.犓犲狔狑狅狉犱狊:brake-by-wire;CAN_FD-bus;single-wheelfailure;redundancy;three-wheelcooperative0 引言随着科技的不断发展以及人们对汽车的需求不断提高,汽车行业得到了快速发展,并且随着人工智能的发展,无人汽车也成为研究热点,其中汽车制动是非常重要的[1]。
第 23卷第 1期2024年 1月Vol.23 No.1Jan.2024软件导刊Software Guide加载系统迭代学习控制器设计与控制算法研究李沛辙,白国振(上海理工大学机械工程学院,上海 200082)摘要:为了使电动伺服加载系统达到更好的控制效果,解决扭矩跟随效果较差、幅值误差和相位误差较大、复杂的控制算法难以应用等一系列问题,利用模糊控制自适应和迭代学习跟踪精度高的特点,设计一种基于模糊控制的迭代学习控制器。
控制器算法采用ST语言编写,并通过实验台的加载采集扭矩曲线。
结果表明,基于模糊控制的迭代学习控制器不仅具有普通迭代学习控制器跟踪精度高的优点,还具有模糊控制自适应的特点,能够用更少的迭代次数更快地达到所需要的跟随扭矩曲线,证明了基于模糊控制的迭代学习控制器的优越性和可行性。
关键词:模糊控制;迭代学习;电动伺服加载;ST语言DOI:10.11907/rjdk.222520开放科学(资源服务)标识码(OSID):中图分类号:TM383.4 文献标识码:A文章编号:1672-7800(2024)001-0026-06Research on Design and Control Algorithm of Iterative LearningController for Loading SystemLI Peizhe, BAI Guozhen(School of Mechanical Engineering, University of Shanghai for Science and Technology, Shanghai 200082, China)Abstract:In order to make the electric servo loading system achieve better control effect, improve a series of problems such as poor torque fol⁃lowing effect, large amplitude error and phase error, and difficult to apply complex control algorithm, an iterative learning controller based on fuzzy control is designed by using the characteristics of fuzzy control self-adaptation and high tracking accuracy of iterative learning.The algo⁃rithm is written in ST language, and the torque curve is collected by loading the experimental bench. It can be seen from the experiment that the iterative learning controller based on fuzzy control not only has the advantages of high tracking accuracy of ordinary iterative learning con⁃troller,but also has the characteristics of adaptive fuzzy control. It can achieve the required torque curve faster with less iterations,which proves the superiority and feasibility of the iterative learning controller based on fuzzy control.Key Words:fuzzy control; iterative learning; electric servo loading; ST language0 引言随着科学技术的大力发展,国防军工、汽车制造、航空航天等领域,对于某些重要零件的性能要求越来越严格,可以模拟真实工作环境的加载系统应用也越来越广泛[1-2]。
·脉冲功率技术·固态Marx 发生器的自动控制研究*饶俊峰, 杨世龙, 王永刚, 姜 松, 李 孜(上海理工大学 机械工程学院,上海 200093)摘 要: 为了进一步推广固态Marx 发生器的应用,实现输出脉冲波形的直观显示,提高电压调节精度,缩短充电调压时间,有必要对固态Marx 发生器的自动控制进行研究。
以现场可编译门阵列(FPGA )作为控制器,将输出电压、频率、脉宽、过电流阈值等参数以及故障检测及指示直接显示在液晶屏上,实现可视化设置和调节,在固态Marx 发生器的输出端并联分压电路和高速数模转换电路,对输出的高压脉冲采样,一方面用于闭环PID 控制实现分段式快速充电和输出电压精准化调节,另一方面用于在虚拟示波器中实时显示输出脉冲电压的基本波形。
此外,在电路中加入了故障检测和保护机制,迅速检测电路中出现的过温、过电流等故障并对其及时停机响应以保护脉冲电源和操作人员安全。
在20级的固态方波Marx 发生器样机中产生的重复频率方波脉冲电压波形表明,该样机已经初步实现自动化控制,并能可靠运行。
关键词: 脉冲电源; 固态Marx 发生器; 自动控制; 闭环电压调节; 故障检测与保护机制; 虚拟示波器中图分类号: TM832 文献标志码: A doi : 10.11884/HPLPB202133.200328Research on automatic control of solid state Marx generatorRao Junfeng , Yang Shilong , Wang Yonggang , Jiang Song , Li Zi(School of Mechanical Engineering , University of Shanghai for Science and Technology , Shanghai 200093, China )Abstract : To further promote the application of solid-state Marx generators, enable them with the visual display of output pulse waveforms, more accurate regulation of voltage, and shorter charging regulation time, it is necessary to study the automatic control of solid-state Marx generator. In this paper, with a field programmable gate array (FPGA)as the controller, the output voltage, frequency, pulse width, overcurrent threshold value, and other parameters, as well as fault detection and indication, are all directly displayed on the LCD screen to realize visible settings and adjustment.In solid-state Marx generators, a voltage dividing circuit in parallel with the output and a high-speed analog-digital conversion circuit is used to realize high-voltage pulse sampling of the output. With these sampled voltage values, on the one hand, the closed-loop segmented PID control can be realized to achieve fast charging and precise adjustment of the output voltage. On the other hand, the basic waveform of the real-time pulses can be displayed in the virtual oscilloscope. Besides, fault detection and protection mechanisms have been added to the circuit to quickly detect over-temperature, overcurrent, and other faults in the circuit and respond to their timely shutdown to protect the pulse generators and the operators. The voltage waveforms of repetitive square pulses generated by the topology of a 20-stage solid-state square Marx generator indicate that the basic automatical control of this solid-state Marx generator has been realized and it can operate reliably.Key words : pulse generator ; solid-state Marx generator ; automatic control ; closed-loop voltage adjustment ;fault detection and protection ; virtual oscilloscope近年来,随着半导体技术的迅猛发展,固态功率半导体开关器件因其体积小、开关频率高、可控性强、可靠性高、寿命长等优点,逐步取代脉冲功率领域中的气体开关,推动了高压脉冲功率电源向小型化、模块化和高重复频率的方向进一步发展[1-5]。
①作者简介:李琳,任职于上海理工大学控制科学与工程系,博士,图1 直线单级倒立摆系统模型图2为直线单级倒立摆系统中小车和摆杆的受力分析图。
N和P为小车与摆杆相互作用力的水平和垂直方向的分量。
定义矢量方向如图所示。
QOGNy cy /y//nhJ˾//Q θO Gsjdupo 图2 直线单级倒立摆小车与摆杆的受力分析其中,M,m分被表示小车及摆杆质量,b为小车摩擦系数,l为摆杆转动轴心到杆质心的长度,I为摆杆惯量,F表示加在小车上的s)u*z2)u*z3)u*QJE2QJE3H2H3ĦĦ图3 双回路PID控制系统结构图3 仿真结果参考固高科技实际系统的模型参数:M=1.096 kg,m=0.109 kg,b=0.1N/m/sec,l=0.25 m,I=0.0034 kg×m 2,把上述参数代可以得到系统的实际模型。
其中,摆杆角度和小车加速度的传递函数:26705.00102125.002725.0)()(2−=Φs s V s 摆杆位移和小车加速度的传递函数为:1)(s XScience and Technology Innovation Herald望儿山金矿体受强构造变形带控制,分为近南北向和北东向两个脉组,矿化富集地段受菱形结环和“X”型脉交叉结点及其附近部位控制。
望儿山断裂成矿期以脆性变形为形成一系列花岗质碎裂岩叠加改造早期糜棱岩。
在北西西向的拉伸力作用下,早期,南北向和北东东向“X”型强挤压变形断裂带转为张开,其南北向压扭性裂隙呈右旋向北东下滑,改造成右型雁列张裂隙,北东东向压扭性裂隙向南西呈左旋下滑,改造成左型雁列张裂隙,矿液沿两组裂隙充填、交代、富集,形成近南北向脉组向北东侧伏和北东向脉组向南西侧伏的现象(图3)。
随着北西后表现为北北西挤压。
1.单脉;2.脉组轴向;3.运动方向;4.压应力;5.拉应力图3 望儿山金矿成矿期应力分析示意图4 结语望儿山断裂带构造控矿规律主要有:矿床在空间分布上具有等距性;断裂带的上下盘均可成矿;矿体在剖面上呈特征“S”型产出并沿F1主断裂在空间上具备一定的对称性;矿体在延深方向上尖灭再现,分段富集。