胡海岩+机械振动基础课后习题解答 习题
- 格式:pdf
- 大小:501.09 KB
- 文档页数:25
弹簧下悬挂一物体,弹簧静伸长为。
设将物体向下拉,使弹簧有静伸长3,然后无初速度地释放,求此后的运动方程。
解:设物体质量为m,弹簧刚度为k,贝mg k,即:n -k/m.g/取系统静平; 衡位f置为原点X0,糸统运动方程为m X&kx0X。
2(参考教材P14)X0解得:x(t)2COS n t弹簧不受力时长度为65cm下端挂上1kg物体后弹簧长85cm设用手托住物体使弹簧回到原长后无初速度地释放,试求物体的运动方程、振幅、周期及弹簧力的最大值。
解:由题可知:弹簧的静伸长V 0.85 0.65 0.2(m)所以:n器觴7(rad/s)取系统的平衡位置为原点,得到:系统的运动微分方程为:X& n2x 0其中,初始条件:x(°)0.2(参考教材P14)X(0) 0所以系统的响应为:x(t) 0.2cos n t(m)弹簧力为:F k kx(t) mg x(t) cos n t(N)2因此:振幅为、周期为争(s)、弹簧力最大值为12重物m i悬挂在刚度为k的弹簧上并处于静平衡位置,另一重物m2从高度为h处自由落到m i上而无弹跳,如图所示,求其后的运动当m有x位移时,系统有:E T(m1m2)>&?U扣2由d(E T U) 0可知:(m1 m2)X& kx 0即:n .k/(m i m2)系统的初始条件为: x mg0 kx o m2 ,2ghm1 m2(能量守恒得:m2gh 1(m1 m2)x&2)因此系统的响应为:x(t) A0 cos n t A1 sin n tA。
其中:A1 x°Anm?gkm?g 2ghkk : m1m2解:取系统的上下运动x为坐标, 向上为正,静平衡位置为原点x 0,则2g j n t) m2即:x(t)m1一质量为m、转动惯量为I的圆柱体作自由纯滚动,圆心受到一弹簧k约束,如图所示,求系统的固有频率。
解:取圆柱体的转角为坐标,逆时针为正,静平衡位置时0,则当m有转角时,系统有:E T丄1 & 咕(&)2Bl mr2)&2 2 21 2U k( r)22由d(E T U) 0 可知:(I mr2)險kr20即:n\kr2/ (I mr2) (rad/s)均质杆长L、重G,用两根长h的铅垂线挂成水平位置,如图所示,试求此杆相对铅垂轴OO微幅振动的周期。
弹簧下悬挂一物体,弹簧静伸长为δ。
设将物体向下拉,使弹簧有静伸长3δ,然后无初速度地释放,求此后的运动方程。
解:设物体质量为m ,弹簧刚度为k ,则:mg k δ=,即:n ω==取系统静平衡位置为原点0x =,系统运动方程为: δ⎧+=⎪=⎨⎪=⎩00020mx kx x x (参考教材P14)解得:δω=()2cos n x t t弹簧不受力时长度为65cm ,下端挂上1kg 物体后弹簧长85cm 。
设用手托住物体使弹簧回到原长后无初速度地释放,试求物体的运动方程、振幅、周期及弹簧力的最大值。
解:由题可知:弹簧的静伸长0.850.650.2()m =-=、 所以:9.87(/)0.2n g rad s ω=== 取系统的平衡位置为原点,得到:系统的运动微分方程为:20n x x ω+=其中,初始条件:(0)0.2(0)0x x =-⎧⎨=⎩ (参考教材P14) 所以系统的响应为:()0.2cos ()n x t t m ω=-弹簧力为:()()cos ()k n mg F kx t x t t N ω===- 因此:振幅为、周期为2()7s π、弹簧力最大值为1N 。
重物1m 悬挂在刚度为k 的弹簧上并处于静平衡位置,另一重物2m 从高度为h 处自由落到1m 上而无弹跳,如图所示,求其后的运动。
<解:取系统的上下运动x 为坐标,向上为正,静平衡位置为原点0x =,则当m 有x 位移时,系统有: 2121()2T E m m x =+ 212U kx =由()0T d E U +=可知:12()0m m x kx ++= 即:12/()n k m m ω=+系统的初始条件为:⎧=⎪⎨=-⎪+⎩2020122m gx k m x gh m m (能量守恒得:221201()2m gh m m x =+) 因此系统的响应为:01()cos sin n n x t A t A t ωω=+其中:ω⎧==⎪⎨==-⎪+⎩200021122n m g A x k x m g ghk A k m m即:ωω=-2()(cos )n n m g x t t t k "一质量为m 、转动惯量为I 的圆柱体作自由纯滚动,圆心受到一弹簧k 约束,如图所示,求系统的固有频率。
2.1 弹簧下悬挂一物体,弹簧静伸长为δ。
设将物体向下拉,使弹簧有静伸长3δ,然后无初速度地释放,求此后的运动方程。
解:设物体质量为m ,弹簧刚度为k ,则:mg k δ=,即:n ω==取系统静平衡位置为原点0x =,系统运动方程为: δ⎧+=⎪=⎨⎪=⎩&&&00020mx kx x x (参考教材P14)解得:δω=()2cos n x t t2.2 弹簧不受力时长度为65cm ,下端挂上1kg 物体后弹簧长85cm 。
设用手托住物体使弹簧回到原长后无初速度地释放,试求物体的运动方程、振幅、周期及弹簧力的最大值。
解:由题可知:弹簧的静伸长0.850.650.2()m =-=V所以:7(/)n rad s ω=== 取系统的平衡位置为原点,得到:系统的运动微分方程为:20n x x ω+=&& 其中,初始条件:(0)0.2(0)0x x=-⎧⎨=⎩& (参考教材P14) 所以系统的响应为:()0.2cos ()n x t t m ω=- 弹簧力为:()()cos ()k n mg F kx t x t t N ω===-V因此:振幅为0.2m 、周期为2()7s π、弹簧力最大值为1N 。
2.3 重物1m 悬挂在刚度为k 的弹簧上并处于静平衡位置,另一重物2m 从高度为h 处自由落到1m 上而无弹跳,如图所示,求其后的运动。
解:取系统的上下运动x 为坐标,向上为正,静平衡位置为原点0x =,则当m 有x 位移时,系统有: 2121()2T E m m x =+& 212U kx =由()0T d E U +=可知:12()0m m x kx ++=&& 即:12/()n k m m ω=+系统的初始条件为:⎧=⎪⎨=-⎪+⎩&2020122m gx k m x gh m m (能量守恒得:221201()2m gh m m x =+&) 因此系统的响应为:01()cos sin n n x t A t A t ωω=+其中:ω⎧==⎪⎨==-⎪+⎩&200021122n m g A x k x m g ghk A k m m即:ωω=-2()(cos )n n m g x t t t k2.4 一质量为m 、转动惯量为I 的圆柱体作自由纯滚动,圆心受到一弹簧k 约束,如图所示,求系统的固有频率。
2.1 弹簧下悬挂一物体,弹簧静伸长为δ。
设将物体向下拉,使弹簧有静伸长3δ,然后无初速度地释放,求此后的运动方程。
解:设物体质量为m ,弹簧刚度为k ,则:mg k δ=,即:n ω==取系统静平衡位置为原点0x =,系统运动方程为: δ⎧+=⎪=⎨⎪=⎩00020mx kx x x (参考教材P14)解得:δω=()2cos n x t t2.2 弹簧不受力时长度为65cm ,下端挂上1kg 物体后弹簧长85cm 。
设用手托住物体使弹簧回到原长后无初速度地释放,试求物体的运动方程、振幅、周期及弹簧力的最大值。
解:由题可知:弹簧的静伸长0.850.650.2()m =-= 所以:9.87(/)0.2n g rad s ω=== 取系统的平衡位置为原点,得到:系统的运动微分方程为:20n x x ω+=其中,初始条件:(0)0.2(0)0x x =-⎧⎨=⎩ (参考教材P14) 所以系统的响应为:()0.2cos ()n x t t m ω=-弹簧力为:()()cos ()k n mg F kx t x t t N ω===-因此:振幅为0.2m 、周期为2()7s π、弹簧力最大值为1N 。
2.3 重物1m 悬挂在刚度为k 的弹簧上并处于静平衡位置,另一重物2m 从高度为h 处自由落到1m 上而无弹跳,如图所示,求其后的运动。
解:取系统的上下运动x 为坐标,向上为正,静平衡位置为原点0x =,则当m 有x 位移时,系统有: 2121()2T E m m x =+ 212U kx =由()0T d E U +=可知:12()0m m x kx ++= 即:12/()n k m m ω=+系统的初始条件为:⎧=⎪⎨=-⎪+⎩2020122m gx k m x gh m m (能量守恒得:221201()2m gh m m x =+) 因此系统的响应为:01()cos sin n n x t A t A t ωω=+其中:ω⎧==⎪⎨==-⎪+⎩200021122n m g A x k x m g ghk A k m m即:ωω=-2()(cos )n n m g x t t t k2.4 一质量为m 、转动惯量为I 的圆柱体作自由纯滚动,圆心受到一弹簧k 约束,如图所示,求系统的固有频率。
弹簧下悬挂一物体,弹簧静伸长为δ。
设将物体向下拉,使弹簧有静伸长3δ,然后无初速度地释放,求此后的运动方程。
解:设物体质量为m ,弹簧刚度为k ,则:mg k δ=,即:n ω== 取系统静平衡位置为原点0x =,系统运动方程为:δ⎧+=⎪=⎨⎪=⎩00020mx kx x x (参考教材P14)解得:δω=()2cos n x t t弹簧不受力时长度为65cm ,下端挂上1kg 物体后弹簧长85cm 。
设用手托住物体使弹簧回到原长后无初速度地释放,试求物体的运动方程、振幅、周期及弹簧力的最大值。
解:由题可知:弹簧的静伸长0.850.650.2()m =-= 所以:9.87(/)0.2n g rad s ω=== 取系统的平衡位置为原点,得到:系统的运动微分方程为:20n x x ω+=其中,初始条件:(0)0.2(0)0x x =-⎧⎨=⎩(参考教材P14) 所以系统的响应为:()0.2cos ()n x t t m ω=-弹簧力为:()()cos ()k n mg F kx t x t t N ω===- 因此:振幅为、周期为2()7s π、弹簧力最大值为1N 。
重物1m 悬挂在刚度为k 的弹簧上并处于静平衡位置,另一重物2m 从高度为h 处自由落到1m 上而无弹跳,如图所示,求其后的运动。
解:取系统的上下运动x 为坐标,向上为正,静平衡位置为原点0x =,则当m 有x 位移时,系统有:2121()2T E m m x =+212U kx =由()0T d E U +=可知:12()0m m x kx ++= 即:12/()n k m m ω=+系统的初始条件为:⎧=⎪⎨=-⎪+⎩2020122m gx k m x gh m m (能量守恒得:221201()2m gh m m x =+) 因此系统的响应为:01()cos sin n n x t A t A t ωω=+其中:ω⎧==⎪⎨==-⎪+⎩200021122n m g A x k x m g ghk A k m m即:ωω=-2()(cos )n n m g x t t t k一质量为m 、转动惯量为I 的圆柱体作自由纯滚动,圆心受到一弹簧k 约束,如图所示,求系统的固有频率。
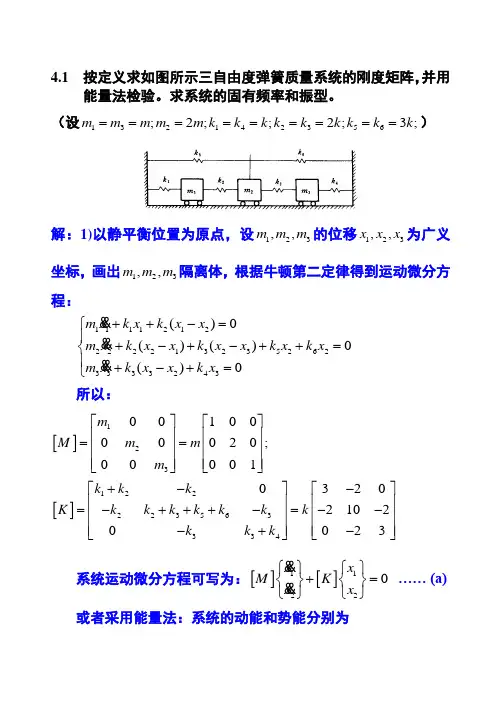
4.1 按定义求如图所示三自由度弹簧质量系统的刚度矩阵,并用能量法检验。
求系统的固有频率和振型。
(设132142356;2;;2;3;m m m m m k k k k k k k k k =========)解:1)以静平衡位置为原点,设123,,m m m 的位移123,,x x x 为广义坐标,画出123,,m m m 隔离体,根据牛顿第二定律得到运动微分方程:11112122222132352623333243()0()()0()0m x k x k x x m x k x x k x x k x k x m x k x x k x ++-=⎧⎪+-+-++=⎨⎪+-+=⎩所以:[][]1231222235633340010000020;01032021020023m M m m m k k k K k k k k k k k k k k ⎡⎤⎡⎤⎢⎥⎢⎥==⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦+--⎡⎤⎡⎤⎢⎥⎢⎥=-+++-=--⎢⎥⎢⎥⎢⎥⎢⎥-+-⎣⎦⎣⎦系统运动微分方程可写为:[][]11220x x M K x x ⎧⎫⎧⎫+=⎨⎬⎨⎬⎩⎭⎩⎭…… (a)或者采用能量法:系统的动能和势能分别为=++ 222112233111222T E m xm xm x=+-+-+++22222112123234356211111()()()22222U k x k x x k x x k x k k x=+++++++--22212123562343212323111()()()222U k k x k k k k x k k x k x x k x x求偏导也可以得到[][],M K2)设系统固有振动的解为: 112233cos x u x u t x u ω⎧⎫⎧⎫⎪⎪⎪⎪=⎨⎬⎨⎬⎪⎪⎪⎪⎩⎭⎩⎭,代入(a )得:[][]1223()0u K M u u ω⎧⎫⎪⎪-=⎨⎬⎪⎪⎩⎭…… (b)得到频率方程:2222320()21022023k mk k k mk kk mωωωω--=---=--即:222422()(3)(21622)0k m m km k ωωωω=--+=解得:2(4k mω=±和23k mω=所以:123ωωω=<=<=………… (c)将(c)代入(b)可得:1233(4202102(420023(4kk m km ukk k m k umukk k mm⎡⎤-±-⎢⎥⎧⎫⎢⎥⎪⎪⎢⎥--±-=⎨⎬⎢⎥⎪⎪⎢⎥⎩⎭⎢⎥--±⎢⎥⎣⎦和123332021023200233kk m km ukk k m k umukk k mm⎡⎤--⎢⎥⎧⎫⎢⎥⎪⎪⎢⎥---=⎨⎬⎢⎥⎪⎪⎢⎥⎩⎭⎢⎥--⎢⎥⎣⎦解得:112131::1:2u u u≈;122232::1:0:1u u u≈-;132333::1:2u u u≈;令31u=,得到系统的振型为:0 1-1 0.618 111.6181 14.2 按定义求如图T—4.2所示三自由度扭转系统的刚度矩阵和质量矩阵。
胡海岩主编---机械振动基础课后习题解答_第2章习题第2章习题含答案习题2-1 定常力作用下的单自由度系统1. 一个单自由度系统的质量m=2kg,刚度k=1000N/m,阻尼系数c=10N·s/m。
试求该系统的固有频率、阻尼比和振动的稳定性。
解:根据公式,该系统的固有频率可计算为:ωn = √(k/m) = √(1000/2) ≈ 22.36 rad/s阻尼比可计算为:ξ = c/(2√(mk)) = 10/(2√(2×1000)) ≈ 0.158振动的稳定性取决于阻尼比ξ的大小。
当ξ<1时,系统为欠阻尼;当ξ=1时,系统为临界阻尼;当ξ>1时,系统为过阻尼。
2. 一个单自由度系统的质量m=5kg,刚度k=500N/m,阻尼系数c=20N·s/m。
试求该系统的固有频率、阻尼比和振动的稳定性。
解:根据公式,该系统的固有频率可计算为:ωn = √(k/m) = √(500/5) = 10 rad/s阻尼比可计算为:ξ = c/(2√(mk)) = 20/(2√(5×500)) ≈ 0.141振动的稳定性取决于阻尼比ξ的大小。
当ξ<1时,系统为欠阻尼;当ξ=1时,系统为临界阻尼;当ξ>1时,系统为过阻尼。
习题2-2 强迫振动的幅值和相位1. 一个单自由度系统的质量m=3kg,刚度k=2000N/m,阻尼系数c=30N·s/m。
给定的外力F(t) = 10sin(5t)N。
试求该系统在稳态时的振动幅值和相位。
解:首先求解系统的强迫响应,即对外力F(t)进行拉氏变换:F(s) = L{F(t)} = L{10sin(5t)} = 10L{sin(5t)} = 10×(5/(s^2+25))根据公式,系统的强迫响应可计算为:X(s) = F(s)/((s^2+ωn^2)+2ξωns)其中,ωn=√(k/m)为系统的固有频率,ξ=c/(2√(mk))为系统的阻尼比。

第十五章 机械振动一 选择题1. 对一个作简谐振动的物体,下面哪种说法是正确的?( )A. 物体在运动正方向的端点时,速度和加速度都达到最大值;B 。
物体位于平衡位置且向负方向运动时,速度和加速度都为零;C. 物体位于平衡位置且向正方向运动时,速度最大,加速度为零;D. 物体处负方向的端点时,速度最大,加速度为零.解:根据简谐振动的速度和加速度公式分析。
答案选C.2.下列四种运动(忽略阻力)中哪一种不是简谐振动?( )A 。
小球在地面上作完全弹性的上下跳动;B 。
竖直悬挂的弹簧振子的运动;C 。
放在光滑斜面上弹簧振子的运动;D. 浮在水里的一均匀球形木块,将它部分按入水中,然后松开,使木块上下浮动。
解:A 中小球没有受到回复力的作用.答案选A.3。
一个轻质弹簧竖直悬挂,当一物体系于弹簧的下端时,弹簧伸长了l 而平衡。
则此系统作简谐振动时振动的角频率为( )A 。
l gB 。
l gC 。
g l D. gl 解 由kl =mg 可得k =mg /l ,系统作简谐振动时振动的固有角频率为l g m k ==ω。
故本题答案为B 。
4. 一质点作简谐振动(用余弦函数表达),若将振动速度处于正最大值的某时刻取作t =0,则振动初相ϕ为( )A 。
2π-B 。
0 C. 2π D 。
π解 由 ) cos(ϕω+=t A x 可得振动速度为 ) sin(d d ϕωω+-==t A tx v .速度正最大时有0) cos(=+ϕωt ,1) sin(-=+ϕωt ,若t =0,则 2π-=ϕ. 故本题答案为A 。
5。
如图所示,质量为m 的物体,由劲度系数为k 1和k 2的两个轻弹簧连接,在光滑导轨上作微小振动,其振动频率为 ( )A 。
mk k 21π2=ν B. m k k 21π2+=ν C. 2121π21.k mk k k +=ν D 。
)k m(k .k k 2121π21+=ν 解:设当m 离开平衡位置的位移为x ,时,劲度系数为k 1和k 2的两个轻弹簧的伸长量分别为x 1和x 2,显然有关系x x x =+21此时两个弹簧之间、第二个弹簧与和物体之间的作用力相等。