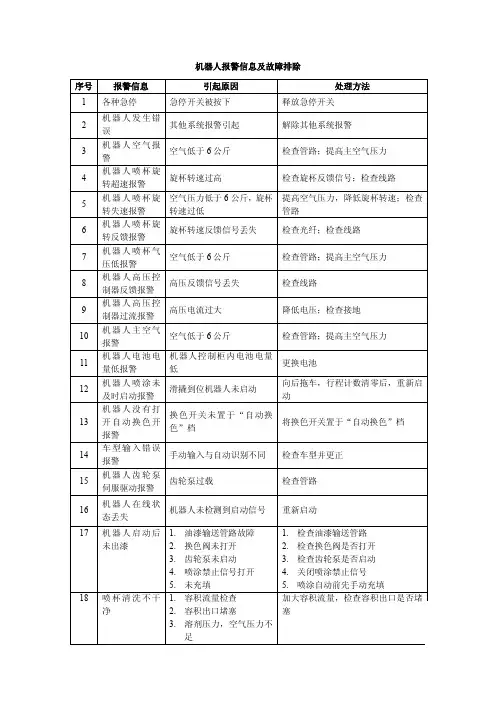
机器人报警信息
- 格式:xlsx
- 大小:12.64 KB
- 文档页数:3
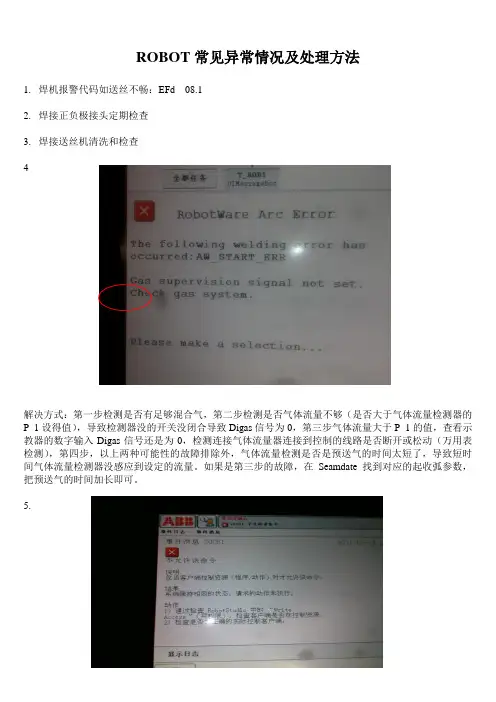
ROBOT常见异常情况及处理方法1.焊机报警代码如送丝不畅:EFd 08.12.焊接正负极接头定期检查3.焊接送丝机清洗和检查4解决方式:第一步检测是否有足够混合气,第二步检测是否气体流量不够(是否大于气体流量检测器的P_1设得值),导致检测器没的开关没闭合导致Digas信号为0,第三步气体流量大于P_1的值,查看示教器的数字输入Digas信号还是为0,检测连接气体流量器连接到控制的线路是否断开或松动(万用表检测),第四步,以上两种可能性的故障排除外,气体流量检测是否是预送气的时间太短了,导致短时间气体流量检测器没感应到设定的流量。
如果是第三步的故障,在Seamdate 找到对应的起收弧参数,把预送气的时间加长即可。
5.出项以上的报警时,是手动模式和自动模式切换时,客户控制资源权限不同导致以上报警。
解决方式:把钥匙打到自动,然后再打到手动操作即可。
6.焊接过程中如果界面跳出这个报警,只有确认下即可,这是焊接电弧对控制信号的干扰,但不影响设备正常运行和作业。
.7出现以上问题导致打底路径不保存,采用以下处理方法1.点击事件消息(示教器界面正上方中间),点击不保存事件,然后查看下一个。
一般不保存有两种情况:(1)编程的轨迹不符合路径保存的规则(点过密或重叠的轨迹及转角故障,下一个报错信息是转角故障或帧错误,若出现由于轨迹不符合保存规则;处理的方法是微调整轨迹。
(2)下一个报错信息是电弧检测,那是由于受焊接时脉冲的波率影响;处理方法:到控制面板—signal —diFr1ArcStable1—修改波率)8.(1).在更改机器的配置时,切记把机器人各轴回位,由于在更改机器人配置时,里面电机数据可能丢失了,所以配置系统提示转数计数器需要更新(以上的画面),如果我在更改配置之前把机器人各轴回到零点位置,系统配置完,机器人提示转数计数器需更新,你只要到较准里面更新下即可,由于之前在零位置上,更新后也是零位,这样更原来的位置就没偏移,要是没回到零点就产生偏移。
1、伺服-001操作面板紧急停止。
SRVO-001 Operator panel E-stop[现象]:按下了操作箱/操作面板的紧急停止按扭。
SYST-067 面板HSSB 断线报警同时发生,或者配电盘上的LED(绿色)熄灭时,主板(JRS11)-配电盘( JRS11)之间的通信有异常,可能是因为电缆不良、配电盘不良、或主板不良。
[对策 1]:解除操作箱/操作面板的紧急停止按扭。
[对策 2]:确认面板开关板( CRM51 )和紧急停止按扭之间的电缆是否断线,如果断线,则更换电缆。
[对策 3]:如果在紧急停止解除状态下触点没有接好,则是紧急停止按扭的故障。
逐一更换开关单元或操作面板。
[对策4]:更换配电盘。
[对策5]:更换连接配电盘(JRS11)和主板( JRS11)的电缆。
在采取对策 6 之前,完成控制单元的所有程序和设定内容的备份。
[对策6]:更换配电盘。
注释:SYST-067 面板 HSSB 断线报警同时发生,或RDY LED熄灭时,有时会导致下面的报警等同时发生。
(参阅示教操作盘的报警历史画面)2、伺服 -001操作面板紧急停止伺服 -004栅栏打开NjーDz -007外部紧急停止伺服 -204外部( SVEMG 异常)紧急停止伺服 -213保险丝,熔断(面板 PCB)伺服 -280SVOFF 输入伺服-002示教操作盘紧急停止SRVO-002 Teach pendant E-stop[现象]:按下了示教操作盘的紧急停止按扭。
[对策 1]:解除示教操作盘的紧急停止按扭。
[对策2]:更换示教操作盘。
伺服-003紧急时自动停机开关SRVO-003 Deadman switch released[现象]:在示教操作盘有效的状态下,尚未按下紧急时自动停机开关。
[对策1]:按下紧急时自动停机开关并使机器人操作。
[对策2]:更换示教操作盘。
3、伺服-021SRDY 断开(组: i轴: j )SRVO-021 SRDY off (Group:i Axis:j)[现象]:当 HRDY 断开时,虽然没有其他发生报警的原因, SRDY 处在断开状态。
MOTOMAN 报警1.引言本文档旨在提供关于MOTOMAN报警的详细信息和解决方案。
在使用MOTOMAN过程中,可能会遇到各种报警情况,本文档将针对不同的报警类型进行解释和处理建议,以帮助用户快速识别和解决报警问题。
2.报警分类2.1 硬件故障报警在这个章节中,将并解释与硬件故障相关的报警信息,如电机过热、伺服驱动器故障等。
针对每个报警类型,将提供可能的原因和解决方案。
2.2 运动异常报警本章节将介绍有关运动异常的报警信息,如轴过速、软限位超出等。
对于每种报警类型,将解释其可能的原因和相应的解决方案。
2.3 安全报警在这个章节中,将提供关于安全方面的相关报警信息,如碰撞检测、急停按钮触发等。
对于每个报警类型,将解释其原因和应对策略。
2.4 系统故障报警本章节将介绍与系统故障相关的报警信息,如通信故障、控制器错误等。
对于每个报警类型,都将提供可能的原因和解决方案。
3.报警解决方案3.1 普遍的报警解决方案在这个章节中,将提供处理与多种报警类型相同的报警的通用解决方案。
例如,检查电源供应是否正常、重置系统等。
3.2 报警处理步骤本章节将提供一般情况下处理MOTOMAN报警的步骤指南,包括初步诊断、报警代码查询、特殊报警处理等。
4.附录本文档的附录部分将包含MOTOMAN报警代码表、常见故障示例、技术支持联系方式等相关信息。
用户可以根据具体情况参考这些附录内容。
注释:1.硬件故障报警:设备硬件功能出现问题而引发的报警通知。
2.运动异常报警:在运动过程中出现异常情况而引发的报警通知。
3.安全报警:的安全装置或系统检测到可能危及人员安全的情况而引发的报警通知。
4.系统故障报警:控制系统或与之相关的设备出现故障而引发的报警通知。
本文档涉及附件:1.MOTOMAN报警代码表(附录)2.常见故障示例(附录)3.技术支持联系方式(附录)本文所涉及的法律名词及注释:1.无。
发那科报警处理(中文)发那科报警处理文档一、报警简介:在发那科操作过程中,可能会遇到各种报警情况,报警信息可以帮助用户快速定位问题并采取相应的处理措施。
本文档详细介绍了发那科报警的分类、处理步骤以及常见解决方法。
二、报警分类:1、运动报警:运动报警是指运动过程中出现的异常情况,如轴超速、轴过载等。
处理步骤如下:a:停止运动,切换到手动模式。
b:检查相关轴和传感器是否正常工作,是否有物体阻挡。
c:若问题未解决,记录报警代码和背景信息,联系发那科售后服务。
2、通信报警:通信报警是指与外部设备通信异常的情况,如通讯断开、通讯超时等。
处理步骤如下:a:检查网络连接是否正常,确认网线、交换机等设备是否正常工作。
b:检查控制器与外部设备间的连接,如电缆是否插紧等。
c:若问题未解决,记录报警代码和背景信息,联系发那科售后服务。
3、传感器报警:传感器报警是指传感器异常的情况,如传感器故障、信号异常等。
处理步骤如下:a:检查传感器是否正确安装并与控制器连接良好。
b:检查传感器的供电情况,确保传感器供电正常。
c:若问题未解决,记录报警代码和背景信息,联系发那科售后服务。
4、系统报警:系统报警是指控制器出现故障或异常情况的报警,如控制器过热、系统时钟错误等。
处理步骤如下:a:关闭电源,待控制器冷却后重新启动。
b:检查控制器的风扇是否正常运行,确保散热良好。
c:若问题未解决,记录报警代码和背景信息,联系发那科售后服务。
三、常见解决方法:1、重启:将电源关闭,然后重新启动,有时可以解决一些临时性问题。
2、检查连接:检查各部件之间的连接是否牢固,确保电源、网线、传感器等设备都正常连接。
3、清理设备:定期清理设备,确保内外部无堵塞或杂质干扰。
4、升级软件:及时升级发那科控制软件以获取最新的功能和 bug 修复。
5、联系售后服务:如问题无法自行解决,请联系发那科售后服务提供详细的报警代码和背景信息以获得专业帮助。
附件:本文档中提到的报警代码查询表法律名词及注释:1、发那科:指由发那科公司生产的自动化设备。
KUKA报警信息处理
1、KSS00276 机器人参数不等于机器人类型
①登录专家模式
②示教器操作:【菜单】—【显示】—【变量】—【单个】
③名称输入:$ROBTRAFO[]
新值:TRAFONAME[]
④点击【设定值】。
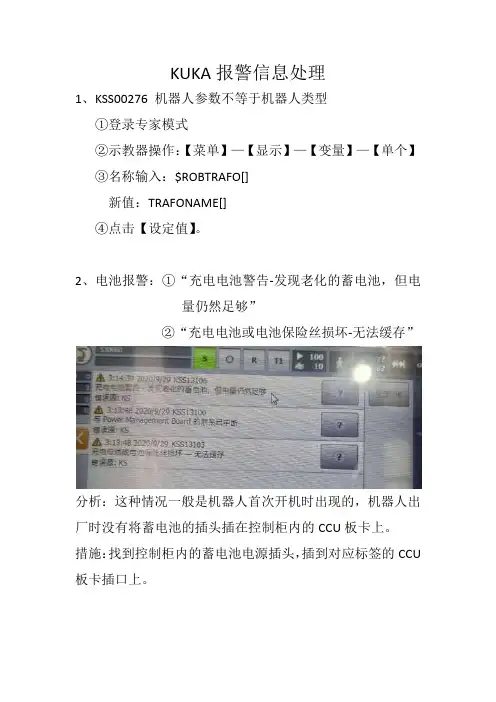
2、电池报警:①“充电电池警告-发现老化的蓄电池,但电
量仍然足够”
②“充电电池或电池保险丝损坏-无法缓存”
分析:这种情况一般是机器人首次开机时出现的,机器人出厂时没有将蓄电池的插头插在控制柜内的CCU板卡上。
措施:找到控制柜内的蓄电池电源插头,插到对应标签的CCU 板卡插口上。
3、.KSS00203-全部运行开通
措施:①【主菜单】—【配置】—【输入/输出端】—【外部自动运行】下;
②在【输入端】找到$MOVE_ENBALE对应的通道改为
1025。
如果外部自动运行时,检查PLC端信号。
4、KSS00308 卸码垛模式:将轴A5+移到位
①登录专家模式
②示教器操作:【菜单】—【显示】—【变量】—【单个】
③名称输入:$pal_mode
新值:true
④点击【设定值】更新
⑤重启控制柜。
5、KSS15012 确认开关损坏
分析:示教器使能键分三个档位:
①正常不按时为一个档位;
②正常上电移动机器人时,第二个档位;
③按到底时第三个档位,会出现安全停止的报警。
处理:将使能键按到底,会出现“确认开关故障”的确认信息,点击“OK”即可。
MOTOMAN 报警
MOTOMAN 报警
1、引言
本文档旨在提供关于MOTOMAN报警的详细信息。
以下章节将介绍报警的各种类型、处理步骤以及相应的法律名词和注释。
本文档为操作人员和技术人员提供参考,以便在报警情况下正确处理和解决问题。
2、报警类型
2.1 运动异常报警
描述:在运动过程中发生异常情况的报警类型。
处理步骤:
- 立即停止的运动。
- 检查是否受到阻碍或碰撞。
- 检查的传感器是否正常工作。
- 尝试重新启动并进行运动测试。
2.2 系统错误报警
描述:系统发生错误导致无法正常工作的报警类型。
处理步骤:
- 检查的电源供应是否正常。
- 检查控制器和计算机系统是否正常连接。
- 检查控制器的软件版本是否最新。
- 联系技术支持团队以获取进一步的帮助和指导。
2.3 安全防护系统报警
描述:的安全防护系统检测到异常情况并发出报警的类型。
处理步骤:
- 确保周围的安全防护设备完整并正常工作。
- 检查安全防护设备的传感器是否受到干扰或损坏。
- 检查安全防护设备的连接是否正确。
- 重置或校准安全防护设备并重新启动。
3、本文档涉及附件
请查阅本文档所附的文件,其中包括详细的报警代码列表、故障排除流程和报警解决方案。
4、法律名词及注释
- :指被程序控制、可编程且具有多种自动操作功能的装置。
- 报警:指系统或组成部分发出的错误或异常情况的通知。
库卡机器人krc4报警代码大全库卡机器人KRC4是一款广泛应用于工业自动化领域的机器人系统。
它能够完成各种任务,提高生产效率并减少对人力资源的依赖。
然而,在使用过程中,偶尔会出现报警代码,这会对生产造成一定程度的影响。
因此,了解和解决这些报警代码是非常重要的。
本文将为您详细介绍库卡机器人KRC4常见的报警代码,并提供可能的解决方案。
请注意,解决方法仅供参考,具体情况需根据实际情况进行判断。
1. 报警代码:A01报警描述:驱动板故障可能的解决方案:检查驱动板是否正确连接,若连接正常,可能需要更换驱动板。
2. 报警代码:B04报警描述:机器人超出边界限制可能的解决方案:检查机器人的边界设置是否正确,确保机器人工作区域与设置的边界区域一致。
3. 报警代码:C07报警描述:机器人缺少工具或末端执行器可能的解决方案:检查工具或末端执行器是否正确安装,确保其与机器人正常连接。
4. 报警代码:D10报警描述:机器人传感器故障可能的解决方案:检查传感器是否损坏,若损坏需更换传感器。
5. 报警代码:E05报警描述:机器人电源故障可能的解决方案:检查电源线连接是否正常,若连接正常,可能需要更换电源。
6. 报警代码:F03报警描述:机器人控制器故障可能的解决方案:检查控制器是否被损坏,若损坏需要更换控制器。
7. 报警代码:G08报警描述:机器人轴错误可能的解决方案:检查机器人的轴是否正常运转,若出现异常,可能需要调整或更换轴。
8. 报警代码:H02报警描述:机器人通信故障可能的解决方案:检查机器人与外部设备间的通信连接是否正常,若连接正常,可能是通信模块故障,需更换模块。
9. 报警代码:J06报警描述:机器人本地I/O故障可能的解决方案:检查I/O模块是否正常连接,若连接正常,可能需要更换I/O模块。
10. 报警代码:K09报警描述:机器人系统程序错误可能的解决方案:检查机器人系统程序是否正确,若有错误,可能需要重新编写或修复程序。
机器人故障报警的说明书一、引言本说明书旨在为用户提供机器人故障报警的相关知识和操作指南。
机器人在长时间运行过程中可能会出现各种故障情况,及时准确地判断和处理这些故障对于机器人的正常运行至关重要。
二、故障报警分类机器人的故障报警大致可以分为以下几类:电气故障、机械故障、通信故障和传感器故障。
每一类故障报警都具有不同的特点和处理方法,下面将分别进行说明。
1. 电气故障报警电气故障报警主要指机器人的电力系统发生了异常情况。
常见的电气故障报警包括电源异常、电机过载等。
当机器人出现电气故障时,会通过报警灯、报警声等方式进行报警提示。
用户在发现电气故障报警时,应立即停止机器人运行,并排查故障原因。
在确认故障原因后,可以尝试修复或更换故障部件。
2. 机械故障报警机械故障报警主要指机器人的机械结构发生了异常情况。
常见的机械故障包括机械部件损坏、机械结构卡死等。
当机器人出现机械故障报警时,通常会通过屏幕显示、声音提示等方式进行报警。
用户在接收到机械故障报警时,应立即停止机器人运行,并检查机械部件是否存在异常。
修复机械故障需要具备一定的机械技能,如果不确定可以联系售后服务。
3. 通信故障报警通信故障报警主要指机器人与外部设备的通信发生了异常情况。
常见的通信故障包括网络连接中断、设备通信异常等。
当机器人出现通信故障报警时,用户可以首先检查网络是否正常,然后检查设备之间的连接是否松动。
如果问题仍然存在,建议联系技术支持进行进一步排查和修复。
4. 传感器故障报警传感器故障报警主要指机器人的传感器系统发生了异常情况。
常见的传感器故障包括传感器失效、传感器信号异常等。
传感器故障报警通常会通过屏幕显示、声音提示等方式提醒用户。
当接收到传感器故障报警时,用户应检查传感器连接是否正常,确认传感器是否受到干扰或损坏。
对于无法解决的故障,用户应联系售后服务或技术支持团队。
三、故障报警处理流程针对不同类型的故障报警,用户可以按照以下处理流程进行操作:1. 停止机器人运行无论故障报警类型如何,用户在接收到报警时应立即停止机器人运行,以防止故障进一步扩大。
(1) SRVO–001 SVAL1 Operator panel E–stop(解释)按下在操作员面板或是操作箱上的紧急停机按钮。
如果SYST-067(面板HSSB 断开连接)警报也同时发生,或是如果在面板上LED 指示灯(绿色)关闭不发光,主板(JRS11)和面板(JRS11)通讯异常。
主板和面板电路板之间的电缆连接可能松动。
或者,电缆,面板电路板或是主板可能有故障。
注意:如果LED 指示灯是关闭不发光的,下面的警报也会产生。
SRVO–001 Operator panel E–stop.SRVO–004 Fence open.SRVO–007 External emergency stop.SRVO–199 Control stop.SRVO–204 External (SVEMG abnormal) E–stop.SRVO–213 Fuse blown (Panel PCB).SRVO–277 Panel E–stop (SVEMG abnormal).SRVO–280 SVOFF input检查显示在示教盒上显示的警报历史。
(措施1)释放在操作员面板或是操作员箱上被按下的紧急停机按钮。
(措施2)检查紧急停机开关连接器CRT8 的电线连接,如果有断开的电线,替换整个线路。
(措施3)当紧急停机按钮在释放的位置,检查接线端和开关的连接,如果没有连接,替换开关。
如果有连接,替换操作员面板PCB。
注意:在执行措施4 前,完成整个控制器的备份来保存所有你的程序和设置。
(措施4)替换主板(2) SRVO–002 SVAL1 Teach pendant E–stop(解释)在示教盒上的紧急停机按钮被按下。
(措施1)释放在示教盒上的紧急停机按钮。
(措施1) 替换示教盒。
(3) SRVO–003 SVAL1 Deadman switch released(解释) 示教盒可以工作,但是deadman开关没有被按下. deadman开关是一个三方向开关。
机器人操作故障信息列表电,按下使能键按钮时,确保系统已上电,171伺服驱动器N报警伺服驱动器N有错误报警。
伺服焊钳报警。
检查伺服驱动器报警原因,予以排除340自动清内存:版本号不匹配系统进行了自动清内存联系专业技术人员341自动清内存:系统参数不匹配系统进行了自动清内存联系专业技术人员0x0020: IO量错,电路板电源24V+12V-12V IO量错,电路板电源24V+12V-12V原因为位控板24V、pow、CH信号插错位或没插IO量错,电路板电源24V+12V-12V解决方法为检查位控板24V、POE、CH信号插头及连线。
604I/O板错误字101或102或1041.101为CAN通信故障,原因为CAN总线电缆断开或接触不良,或104重启而IO板没重启,或者CAN板卡故障1.101解决方法为更换CAN线,或者更换IO板。
2.102为IO板卡异常重启 2.102解决方法为更换IO板。
3.104为Can通信超时 3.104解决方法为更换CAN线,或者更换IO板。
606位控板N返回数据超时主控板未接收到位控板N的数据信息检查主控板与位控板之间的连线(CAN线)或者检查位控板拨码是否拨对,位控板跳冒是否拔掉607硬限位检测到硬限位信号检测是否到达机械硬限;校验硬限位信号;检查硬限位开关线路608安全门1打开检测到安全门打开在安全门打开状态进行合理操作707IO板1错误:+错误字708IO板2错误:+错误字8001、2轴绝对码盘未返脉冲板未向主控板返回1、查看脉冲板与主控板之间总回2轴的绝对码盘信息线连接情况8013、4轴绝对码盘未返回脉冲板未向主控板返回3、4轴的绝对码盘信息查看脉冲板与主控板之间总线连接情况8025、6轴绝对码盘未返回脉冲板未向主控板返回5、6轴的绝对码盘信息查看脉冲板与主控板之间总线连接情况803脉冲板IO及状态字未返回脉冲板未向主控板返回IO及状态字信息查看脉冲板与主控板之间总线连接情况8041-3轴接收相对位置点被覆盖一个节拍内脉冲板接收到两次码盘数据1、确认主板驱动及FPGA程序2、致命错误,请联系设计人员8054-6轴接收相对位置点被覆盖一个节拍内脉冲板接收到两次码盘数据1、确认主板驱动及FPGA程序2、致命错误,请联系设计人员806脉冲板接收到无定义的RC指令脉冲板接收CAN数据时发生错误1、更换脉冲板2、致命错误,请联系设计人员807脉冲板等待RC指令超时1、确认操作是否正确2、致命错误,请联系设计人员8101号IO板数据未返回1号IO板数据未返回检查1号IO板总线连接情况8112号IO板数据未返回2号IO板数据未返回检查2号IO板总线连接情况812码盘值无效RC没有读取到码盘值1、确认RC程序 2、确认脉冲板DSP程序 3、更换脉冲板813813 Alam:axis +报警驱动器的ID 某ID的驱动器产生报警检查伺服驱动器报警原因,予以排除814速度超界:axis +轴数主控板检测出速度超过设定限制值1、检查主板参数中(RC参数)速度限设定值 2、检查减速比 3、检查驱动器参数815跟踪差超界: axis +轴数主控板检测出跟踪差超过设定限制值1、检查主板参数中(RC参数)速度限设定值 2、检查减速比 3、检查驱动器参数816看门狗报警脉冲板内部的错误报警联系脉冲板软件开发人员817硬件安全开关输入无效脉冲板内部的错误报警联系脉冲板软件开发人员820第7、8轴绝对码盘未返回脉冲板未向主控板返回第7、8轴的绝对码盘信息查看脉冲板与主控板之间的总线连接情况8232号脉冲板IO状态字未返回2号脉冲板未向主控板返回IO及状态字信息查看脉冲板与主控板之间的总线连接情况8242号:1-3轴接收相对位置点被覆盖脉冲板一个节拍接收到两次码盘数据致命错误,请联系设计人员8252号:4-6轴接收相对位置点被覆盖8262号:脉冲板接收到无定义的RC指令2号脉冲板接收CAN数据时发生错误1、更换脉冲板2、致命错误,请联系设计人员830脉冲板跟踪差超界:axis +轴数脉冲板内部检测到当前跟踪差超过设定限值1、检查脉冲板参数中(PMC参数)跟踪差设定值 2、检查减速比 3、检查QEP是否丢码 4、检查485是否丢码831脉冲板速度超界:axis+轴数脉冲板内部检测到当前速度限超过设定限值1、检查主板参数中(RC参数)速度限设定值 2、检查减速比 3、检查驱动器参数8372号:看门狗报警脉冲板内部安全检测联系专业技术人员8382号:硬件安全开关输入无效脉冲板内部安全检测联系专业技术人员840已发生系统错误,不允许上电操作CAN通讯过程中发生错误联系专业技术人员841不满足上电输出条件上电输出条件:脉冲板正常、硬限位正常、CAN通讯正常、暂停按钮正确检查硬件线路842上电输出后没有应答上电输出后256个节拍仍然没有上电应答返回检查上电应答硬件线路843驱动器未准备好上电应答后256个节拍没有驱动器的READY信号返回1、检查驱动器参数2、检查驱动器硬件线路844驱动器未返回制动器解除上电应答后256个节拍没有驱动器的BRKOFF信号返回检查驱动器硬件线路845未接收到松报闸应答发送松报闸后16个节拍没有松报闸应答返回检查驱动器硬件线路846请解除急停信号伺服上电时检测到急停安全继电器错误检查急停安全继电器及相关硬件线路847远程模式中,禁止本地伺服上电在远程控制模式下,按了本地伺服上电按钮1、远程模式下,用外部伺服上电信号进行上电。
问题:
机器人总是显示10106,提示我们进行机器人的检修,我们应该怎么做呢?
回答:
报警提示10106、10107、10108、10109、10110、10111、10112的含义是与机器人定期保养和检修有关的,用于提示用户对机器人进行必要的保养和检修,具体的做法请参阅机器人手册或与ABB机器人售后服务部门联系。
在完成对应的保养和检修后,要进行一个操作将保养与检修提示的计时复位,操作如下:
1、进行程序编辑器----调试------调用例行程序
2、选“ServiceInfo"子程序,然后按照一般程序的启动方式启动程序
3、选择对应要复位的计时对象 1是定期保养时间 2是操作时间 3是齿轮箱保养时间
4、选”RESET"
5、选“yes”
6、你可以看到"Elapsed time"已被复位为0了。
7、最后就是在程序编辑器中将"PP移至MAIN"就好了。
我们在使用OTC焊接机器人的过程中会遇到机器人异常报警(故障代码)的时候,这样的状态下机器人停止工作,示教器上会显示报警代码,那么我们可以根据这些报警代码来确认目前焊接机器人的故障或者异常的原因,可以用相应的解决办法来解决这些故障或者异常,使OTC机器人能继续工作。
如果需要OTC机器人维修工作也可以联系我们。
今天我们先说OTC机器人异常报警时出现以下十个报警(故障)代码5264、5265、5266、5267、5268、5269、5270、
5270、5285、5286、5287时的解决维修方法就简单介绍到这里,希望能给您带来帮助,还有很多别的报警故障代码因为篇幅的原因,我们在后面会慢慢全部介绍出来。
雅马哈四轴机器人报警代码915+E17 故障排除
1.1警报故障码说明:
(1)E01: 原点信号故障!
(2)E02: 终点信号故障!
(3)E03: 副臂上位信号故障!
(4)E04: 正臂上位信号故障!
(5)E06:正臂成品确认信号故障!
(6)E07:副臂夹具信号故障!
(7)E08:空气压力不足!
(8)E12:正臂侧姿信号故障!
(9)E13:正臂回正信号故障!
(10)E14:置料安全信号故障!
(11)E17:正臂前进信号故障!
(12)E20:副臂前进信号故障1
(13)E20:副臂后退信号故障!
(14)E24:正臂侧姿电磁阀故障!
(15)E25:副臂下行电磁阀故障!
(16)E26:副臂前进电磁阀故障!
(17)E27:变频器故障!
(18)E32:原点与终点信号同时ON!
(19)E36:置物安全信号已亮!
(20)E37:中板信号故障!
(21)E80:已达设定模数!
(22)E92:开模完信号故障!。
1.机器人报警“20252”,电机温度高,DRV1处理方式:检查电机是否过热,如电机温度正常则检查连接电缆是否正常(可能是控制柜处航空插头没插好)。
如果查不出问题,又着急用机器人,可临时将报警信号短接,不过注意,此时电机真正过热后也不会报警,可能会引起电机烧毁!!!!!!具体方式如下:在控制柜左下角找到A43板,找到板子上X5插头,上边有4根线,其中线号为439和440的两根线就是电机过热报警信号线,将两根线从中间断开,把板子这边的两根线短接即可。
2. 检查工控机主板是否正常的方法:工控机上有3个LED 灯,如下图所示1号灯为电源指示灯,只要电源打到开位此灯就常亮,如此灯不亮则检查工控机电源是否正常。
2号灯为开机程序引导指示灯,开机过程中闪烁,开机完成后灯灭。
开机程序保存在存储卡中,如开机过程中此灯不闪烁,则可能是存储卡故障。
1 2 3存储卡3号灯为主板状态指示灯,开机过程中先是红灯闪烁,后变为绿灯闪烁,最后绿灯常亮,如果此灯最后显示红色或者不亮,则主板有问题,如果按上述过程依次点亮,则证明主板是正常的。
3.如果机器人系统异常或崩溃,可先尝试用“B启动”重新启动,即可恢复到最近的正产状态。
具体方法如下:点击示教器右上角ABB图标,点击重新启动4.机器人I/O状态都丢失,检查控制柜中I/O板,在控制柜柜门的右下角,检查板子上的指示灯是否点亮,如果灯都不亮则检查I/O 板的电源和电源的保险(如下红色箭头所示),如果只是个别I/O 丢失,则查看板子上对应的接线端子,看线是否松动。
5.如果一垛铝锭抓取完了,机器人还继续往下抓,检查轨道末端的光电眼,看其是不是没有对正对侧的反光板,或者是光电眼损坏。
6.如果机器人在自动运行过程中突然不动了,需要查看示教器上显示的程序运行位置,看是否在等待某一I/O信号,然后检查相应的信号源是否正常。
7.如果外部急停按钮都已经解开而机器人一直报紧急停止,则检查控制柜右侧壁右上角的板子(panel board),X1端子的3、4号端子控制机器人的紧急停止,如果3、4号端子之间的连线断开,机器人就报紧急停止。