川崎机器人报警代码
- 格式:pdf
- 大小:215.32 KB
- 文档页数:21
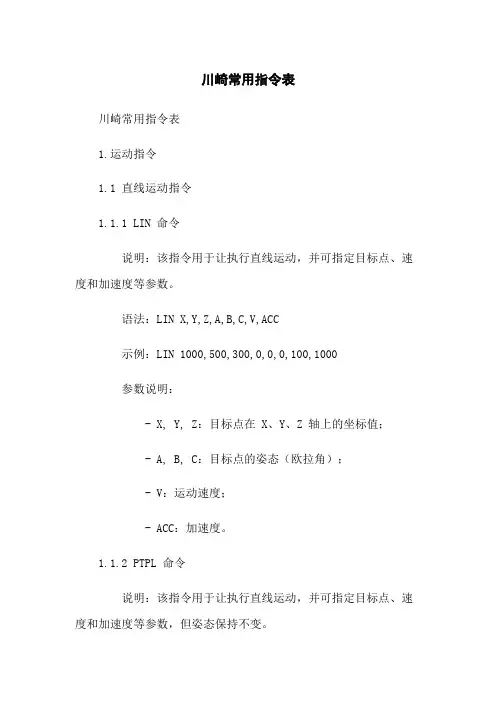
川崎常用指令表川崎常用指令表1.运动指令1.1 直线运动指令1.1.1 LIN 命令说明:该指令用于让执行直线运动,并可指定目标点、速度和加速度等参数。
语法:LIN X,Y,Z,A,B,C,V,ACC示例:LIN 1000,500,300,0,0,0,100,1000参数说明:- X, Y, Z:目标点在 X、Y、Z 轴上的坐标值;- A, B, C:目标点的姿态(欧拉角);- V:运动速度;- ACC:加速度。
1.1.2 PTPL 命令说明:该指令用于让执行直线运动,并可指定目标点、速度和加速度等参数,但姿态保持不变。
语法:PTPL X,Y,Z,V,ACC示例:PTPL 1000,500,300,100,1000参数说明:- X, Y, Z:目标点在 X、Y、Z 轴上的坐标值;- V:运动速度;- ACC:加速度。
1.2 旋转运动指令1.2.1 CIR 命令说明:该指令用于让按照圆弧路径执行旋转运动,并可指定圆心坐标、目标点坐标、速度和加速度等参数。
语法:CIR Xc,Yc,Zc,Xe,Ye,Ze,V,ACC示例:CIR 1000,500,300,2000,1000,500,100,1000参数说明:- Xc, Yc, Zc:圆心坐标;- Xe, Ye, Ze:目标点坐标;- V:运动速度;- ACC:加速度。
1.2.2 PTPR 命令说明:该指令用于让按照旋转角度执行旋转运动,并可指定旋转轴、旋转角度、速度和加速度等参数。
语法:PTPR A,VR,ACC示例:PTPR 90,100,1000参数说明:- A:旋转角度;- VR:旋转速度;- ACC:加速度。
2.控制指令2.1 停止指令2.1.1 STOP 命令说明:该指令用于让停止当前运动。
语法:STOP示例:STOP2.1.2 HALT 命令说明:该指令用于紧急停止,立即停止当前运动,并关闭系统。
语法:HALT示例:HALT2.2 IO 控制指令2.2.1 DO 命令说明:该指令用于控制数字输出口,可设置开关状态为开或关。
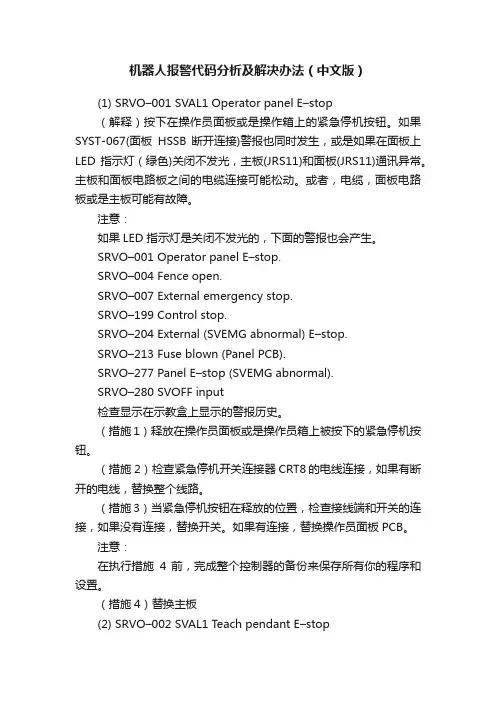
机器人报警代码分析及解决办法(中文版)(1) SRVO–001 SVAL1 Operator panel E–stop(解释)按下在操作员面板或是操作箱上的紧急停机按钮。
如果SYST-067(面板HSSB 断开连接)警报也同时发生,或是如果在面板上LED 指示灯(绿色)关闭不发光,主板(JRS11)和面板(JRS11)通讯异常。
主板和面板电路板之间的电缆连接可能松动。
或者,电缆,面板电路板或是主板可能有故障。
注意:如果LED 指示灯是关闭不发光的,下面的警报也会产生。
SRVO–001 Operator panel E–stop.SRVO–004 Fence open.SRVO–007 External emergency stop.SRVO–199 Control stop.SRVO–204 External (SVEMG abnormal) E–stop.SRVO–213 Fuse blown (Panel PCB).SRVO–277 Panel E–stop (SVEMG abnormal).SRVO–280 SVOFF input检查显示在示教盒上显示的警报历史。
(措施1)释放在操作员面板或是操作员箱上被按下的紧急停机按钮。
(措施2)检查紧急停机开关连接器CRT8 的电线连接,如果有断开的电线,替换整个线路。
(措施3)当紧急停机按钮在释放的位置,检查接线端和开关的连接,如果没有连接,替换开关。
如果有连接,替换操作员面板PCB。
注意:在执行措施4 前,完成整个控制器的备份来保存所有你的程序和设置。
(措施4)替换主板(2) SRVO–002 SVAL1 Teach pendant E–stop(解释)在示教盒上的紧急停机按钮被按下。
(措施1)释放在示教盒上的紧急停机按钮。
(措施1) 替换示教盒。
(3) SRVO–003 SVAL1 Deadman switch released(解释) 示教盒可以工作,但是deadman开关没有被按下. deadman开关是一个三方向开关。
首先,我们应该**时间做好系统数据备份工作。
去详细的了解故障现象,通过现场一些设备的基本现象和现场技术人员的描述进行判断,会比较有效率。
然后根据故障问题来解决问题。
例如,根据一位现场工程师的描述“川崎控制器偶发会产生自动重启现象,这个重启过程中会看到快要启动时,又关了机。
经过反复重启后,终于有一次成功启动”。
根据系统日志履历信息我们可以看到一些蛛丝马迹。
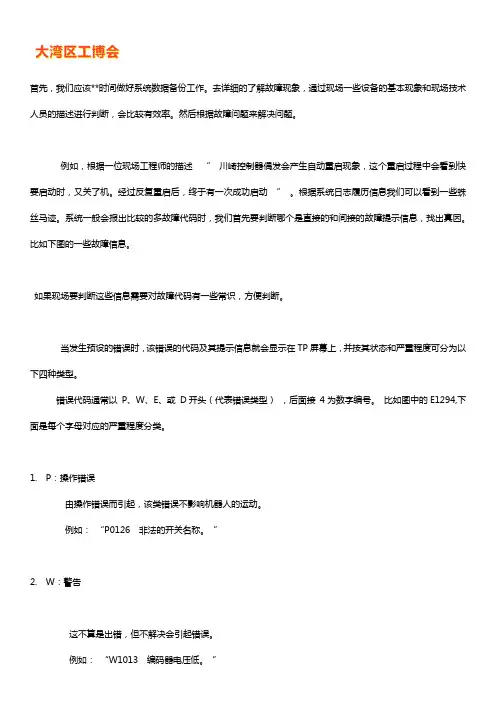
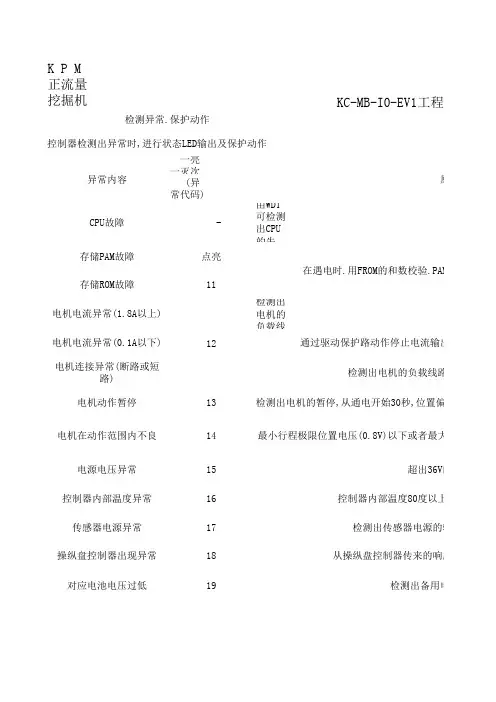
系统一般会报出比较的多故障代码时,我们首先要判断哪个是直接的和间接的故障提示信息,找出真因。
比如下图的一些故障信息。
如果现场要判断这些信息需要对故障代码有一些常识,方便判断。
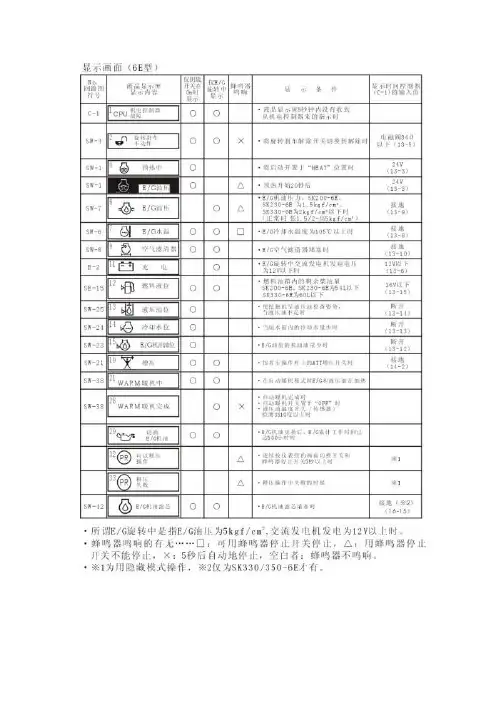
当发生预设的错误时,该错误的代码及其提示信息就会显示在TP屏幕上,并按其状态和严重程度可分为以下四种类型。
错误代码通常以P、W、E、或D开头(代表错误类型),后面接4为数字编号。
比如图中的E1294,下面是每个字母对应的严重程度分类。
1. P:操作错误由操作错误而引起,该类错误不影响机器人的运动。
例如:“P0126 非法的开关名称。
”2. W:警告这不算是出错,但不解决会引起错误。
例如:“W1013 编码器电压低。
”3. E:微小故障此类微小故障,如果引起错误的原因已被清除,可以通过错误复位功能就能恢复,无需开/关控制器电源。
例如:“E1082超出运动范围的**下限值。
”4. D:严重故障这种严重故障涉及硬件、软件或周边装置,不能通过错误复位功能来恢复;它的恢复需要关断并重新开启控制器电源。
例如:“D1528 控制器温度超限。
”返回头看下故障图中故障级别*高的是D字开头的1028和1562,而E字开头则为间接性故障信息提示,E字开头大部分都可以复位。
重点检查故障代码D1028和1562,找到故障信息手册中D1028再看下D1562通过这些信息基本可以判断为AVR稳定电源电压问题。
AVR(自动电压调节器)是一种密封电子装置,他自身附有并联补偿电源功能。
两种情况:一是自身电源板路稳压电路部分出了问题;二是外部(工厂电压不稳定)电源电压异常;经过测量外部电压约228伏,在98~235.4V范围之内,属于正常现象。
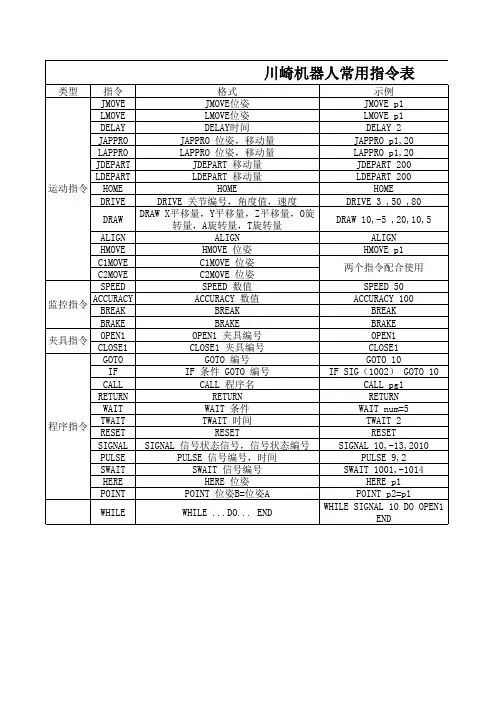
川崎常用指令表川崎常用指令表一、基本指令1、START:启动的运行。
2、STOP:停止的运行。
3、RESET:重置的状态。
4、PAUSE:暂停的运行。
5、RESUME:恢复的运行。
二、坐标系设置1、BASE:设置的基坐标系。
2、TOOL:设置的工具坐标系。
3、USER:设置的用户坐标系。
三、运动指令1、MOVJ:关节运动指令,以关节角度为运动参数。
2、MOVL:直线运动指令,以目标位置坐标为运动参数。
3、MOVC:圆弧运动指令,以目标位置坐标和插补半径为运动参数。
4、MOVT:工具坐标系下的运动指令,以工具坐标系的目标位置坐标为运动参数。
5、MOVLINC:增量直线运动指令,以增量位置坐标为运动参数。
6、MOVCINC:增量圆弧运动指令,以增量位置坐标和插补半径为运动参数。
7、MOVTINC:工具坐标系下的增量运动指令,以增量位置坐标为运动参数。
四、速度控制指令1、SPEED:设置的运动速度。
2、ACCEL:设置的加速度。
3、DECEL:设置的减速度。
五、力控制指令1、FORCE:设置的力控制模式及参数。
2、NOFORCE:取消的力控制模式。
六、输入输出指令1、DI:读取数字输入信号的状态。
2、DO:控制数字输出信号的状态。
3、:读取模拟输入信号的数值。
4、AO:控制模拟输出信号的数值。
七、数据传输指令1、WT:等待指定条件满足。
2、SIGNAL:发送信号。
3、RECEIVE:接收信号。
八、其他指令1、MESSAGE:显示提示信息。
2、CALL:调用子程序。
3、RET:返回主程序。
4、COMMENT:添加注释。
5、JUMP:无条件跳转到指定位置。
6、IF:条件判断语句。
附件:此处可以添加川崎常用指令的实际示例。
法律名词及注释:1、:根据国家法律法规和标准,指能自动执行工作的多自由度机械装置,具有感知、决策和执行功能。
2、关节角度:各个关节的转动角度。
3、目标位置坐标:执行运动的目标位置的坐标值。
![okuma报警代码_1089~1945[1]](https://uimg.taocdn.com/965d86fa0242a8956bece471.webp)
1、伺服-001操作面板紧急停止。
SRVO-001 Operator panel E-stop[现象]:按下了操作箱/操作面板的紧急停止按扭。
SYST-067 面板HSSB 断线报警同时发生,或者配电盘上的LED(绿色)熄灭时,主板(JRS11)-配电盘( JRS11)之间的通信有异常,可能是因为电缆不良、配电盘不良、或主板不良。
[对策 1]:解除操作箱/操作面板的紧急停止按扭。
[对策 2]:确认面板开关板( CRM51 )和紧急停止按扭之间的电缆是否断线,如果断线,则更换电缆。
[对策 3]:如果在紧急停止解除状态下触点没有接好,则是紧急停止按扭的故障。
逐一更换开关单元或操作面板。
[对策4]:更换配电盘。
[对策5]:更换连接配电盘(JRS11)和主板( JRS11)的电缆。
在采取对策 6 之前,完成控制单元的所有程序和设定内容的备份。
[对策6]:更换配电盘。
注释:SYST-067 面板 HSSB 断线报警同时发生,或RDY LED熄灭时,有时会导致下面的报警等同时发生。
(参阅示教操作盘的报警历史画面)2、伺服 -001操作面板紧急停止伺服 -004栅栏打开NjーDz -007外部紧急停止伺服 -204外部( SVEMG 异常)紧急停止伺服 -213保险丝,熔断(面板 PCB)伺服 -280SVOFF 输入伺服-002示教操作盘紧急停止SRVO-002 Teach pendant E-stop[现象]:按下了示教操作盘的紧急停止按扭。
[对策 1]:解除示教操作盘的紧急停止按扭。
[对策2]:更换示教操作盘。
伺服-003紧急时自动停机开关SRVO-003 Deadman switch released[现象]:在示教操作盘有效的状态下,尚未按下紧急时自动停机开关。
[对策1]:按下紧急时自动停机开关并使机器人操作。
[对策2]:更换示教操作盘。
3、伺服-021SRDY 断开(组: i轴: j )SRVO-021 SRDY off (Group:i Axis:j)[现象]:当 HRDY 断开时,虽然没有其他发生报警的原因, SRDY 处在断开状态。
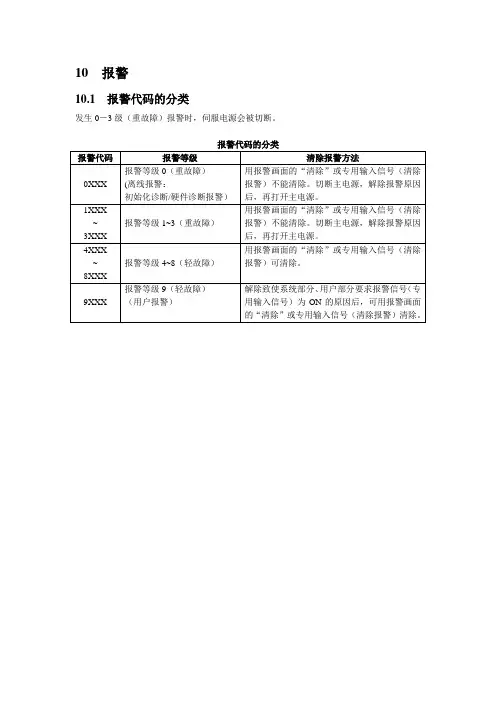
10报警
10.1报警代码的分类
发生0-3级(重故障)报警时,伺服电源会被切断。
10.2报警信息一览表
注意
处理方法栏中有关系统控制基板(JANCD-XCP01)的处理方法时需对维护模式进行处理,故请特别注意。
JANCD-XCP01由电池支持,存储有用户程序中的重要文件数据,误操作会造成存储的内容消失。
因此,如果判断出需做与JANCD-XCP01有关的处理,请先与本公司技术服务部门联系再做处理。
报警信息一览表
11 错误
11.1 错误信息一览表
从示教编程器及外部设备(计算机、PLC)等进行存取时,由于错误的操作及存取方法会产生错误,因此警告操作者,不能进行以下的操作。
发生错误后,请确认错误内容,然后进行解除操作。
错误解除方法有以下两种。
●按下示教编程器的[CANCEL]键。
●输入专用信号(清除报警.错误)。
重要错误与报警不同,即使在机器人动作中(再现中)发生,机器人的动作也不会停止。
11.1.1 系统一般操作
11.1.2 编辑总括
11.1.3 程序登录数据
11.1.4外部记忆装置
11.1.5并行I/O。
MOTOMAN 报警1.引言本文档旨在提供关于MOTOMAN报警的详细信息和解决方案。
在使用MOTOMAN过程中,可能会遇到各种报警情况,本文档将针对不同的报警类型进行解释和处理建议,以帮助用户快速识别和解决报警问题。
2.报警分类2.1 硬件故障报警在这个章节中,将并解释与硬件故障相关的报警信息,如电机过热、伺服驱动器故障等。
针对每个报警类型,将提供可能的原因和解决方案。
2.2 运动异常报警本章节将介绍有关运动异常的报警信息,如轴过速、软限位超出等。
对于每种报警类型,将解释其可能的原因和相应的解决方案。
2.3 安全报警在这个章节中,将提供关于安全方面的相关报警信息,如碰撞检测、急停按钮触发等。
对于每个报警类型,将解释其原因和应对策略。
2.4 系统故障报警本章节将介绍与系统故障相关的报警信息,如通信故障、控制器错误等。
对于每个报警类型,都将提供可能的原因和解决方案。
3.报警解决方案3.1 普遍的报警解决方案在这个章节中,将提供处理与多种报警类型相同的报警的通用解决方案。
例如,检查电源供应是否正常、重置系统等。
3.2 报警处理步骤本章节将提供一般情况下处理MOTOMAN报警的步骤指南,包括初步诊断、报警代码查询、特殊报警处理等。
4.附录本文档的附录部分将包含MOTOMAN报警代码表、常见故障示例、技术支持联系方式等相关信息。
用户可以根据具体情况参考这些附录内容。
注释:1.硬件故障报警:设备硬件功能出现问题而引发的报警通知。
2.运动异常报警:在运动过程中出现异常情况而引发的报警通知。
3.安全报警:的安全装置或系统检测到可能危及人员安全的情况而引发的报警通知。
4.系统故障报警:控制系统或与之相关的设备出现故障而引发的报警通知。
本文档涉及附件:1.MOTOMAN报警代码表(附录)2.常见故障示例(附录)3.技术支持联系方式(附录)本文所涉及的法律名词及注释:1.无。
川崎机器人冲突检测阈值设置指导书
记下上面的冲突号
修改阈值的时候用
然后点击复位
如果出现上面的错误信息,请按照如下步骤操作
1:记下冲突号,就是检测到*的冲突这个号码
2:点击复位按钮,错误提示消失
3:按示教器的[R]键,弹出如下对话框,输入数字051002并按[登录]键
请翻阅到第二页↓
冲突轴号
当前设定值
当前冲突值
请注意上面冲突检测用阈值
如果确实是机器人正常工作时发生的冲突报警,那么将对应JT编号的冲突值适当增大到超过当前冲突值
例:当前JT3的冲突值显示为176,那么就将上面的设定值改为180或者185.
然后按[登录]键确认输入,并打开机器人的马达和循环.机器人正常运行
注:不得将值改的过大,否则会失去冲突检测的作用.切勿改动其他参数!
本设置方法仅限与专业人员与经过培训的维修人员更改,其他人员不得随意改动.
如发现未经过授权擅自改动以上参数,情节严重的相关人员直接解除劳动合同!
相关解释:阈值的概念就是一个限定值,超过或等于这个值为一个状态,小于这个值为一个状态,可以理解为临界点。
川崎机器人冲突检测阈值设置指导书
记下上面的冲突号
修改阈值的时候用
然后点击复位
如果出现上面的错误信息,请按照如下步骤操作
1:记下冲突号,就是检测到*的冲突这个号码
2:点击复位按钮,错误提示消失
3:按示教器的[R]键,弹出如下对话框,输入数字051002并按[登录]键
请翻阅到第二页↓
冲突轴号
当前设定值
当前冲突值
请注意上面冲突检测用阈值
如果确实是机器人正常工作时发生的冲突报警,那么将对应JT编号的冲突值适当增大到超过当前冲突值
例:当前JT3的冲突值显示为176,那么就将上面的设定值改为180或者185.
然后按[登录]键确认输入,并打开机器人的马达和循环.机器人正常运行
注:不得将值改的过大,否则会失去冲突检测的作用.切勿改动其他参数!
本设置方法仅限与专业人员与经过培训的维修人员更改,其他人员不得随意改动.
如发现未经过授权擅自改动以上参数,情节严重的相关人员直接解除劳动合同!
相关解释:阈值的概念就是一个限定值,超过或等于这个值为一个状态,小于这个值为一个状态,可以理解为临界点。
O K U M A常见报警信息及解决办法-标准化文件发布号:(9456-EUATWK-MWUB-WUNN-INNUL-DDQTY-KIIOKUMA常见报警及解决办法1、Y、Z轴润滑报警报警代码为2705或2706出现该报警基本上是压力继电器信号未来,若出现润滑报警...ON则是为Y、Z轴没有润滑,从下顺时针调大压力继电器润滑量即可,反之则相反。
可从主界面按选项Check第二十七页ILBYZ观察,系统设置是10分钟润滑一次,ILBYZ亮了会熄灭重复这个则为正常。
若调、换了继电器还是报警则1、管子内可能有空气,将润滑管松一点启动机床留出润滑油扯紧即可。
2、机床右侧导轨油润滑泵有杂质,用风枪进行清洁。
2、MCS总线电压异常报警代码为2156,出现该报警后可等待十几分钟后再按复位可消除,若消除不了只有关机断电将驱动器取下寄回宜宾维修。
拆驱动器时需注意1、取驱动器之前记好显示屏的报警以及驱动器显示的报警2、取驱动器记下驱动器薄码的编号以及维修装上去后与其他机床对比3、断电后需要等驱动器电源的红色指示灯熄灭后再拆4、每个驱动器的线都有自己号码,U代表的是顺序第几个驱动器。
3、2168或2169 MCS光栅尺异常出现该报警时注意是哪根轴报警。
将报警的那根轴的盖板打开把读数头的插头重新接一下看是否报警,如果还不能解决就将整个读数头取下用工业酒精擦拭清洁重装,如果还不能解决报警只有改为半闭环。
4、2173MCS电机过热出现该报警检查电机的风扇是否运行,检查出是电机扇热故障还是驱动器故障。
5、机床无法调出程序在调程序显示报警时,1、检查进电气柜的网线是否松脱2、检查进电脑主机网线是否松脱3、清理TC盘缓存。
6、1071存储版电池紧急更换换电池时需将机床关机,在PLC模块MODE旋钮从0拨到1,开机启动选择选择选项。
然后关机将电池取下并装上,启动选择选项。
关机,将MODE选项拨到0重启即可。
7、2462主轴分度异常出现该报警时或者机床主轴不能旋转时,将第一步改为1,观察U系列15-2第。
川崎机器人报警代码代码错误信息PO100非法的输入数据。
PO101变量太多。
PO102输入数据过大。
PO103非法的PC编号。
PO104非法的机器人编号。
PO105非法程序PO106非法的优先级。
PO107无效的坐标值。
PO108语法错误。
PO109无效语句。
PO110请指明命令的全拼。
PO111当前模式下不能使用该条命令/指令。
PO112不能用D0指令执行。
PO113不是程序指令。
PO114非法表达式。
PO115非法函数。
PO116函数变量非法。
PO117无效变量(或程序)名。
PO118非法的变量型类。
PO119数组下标错误。
PO120括号不成对。
PO121需要的是二进制算子。
PO122非法常数。
PO123非法的原定符。
PO124无效标签。
PO125缺字符。
PO126非法的开关名称。
PO127指定的开关名称需要全拼。
PO128非法格式的分类符。
PO129标签语句重复。
PO130不能定义为数组。
PO131数组的维数大于3。
PO132数组变量已存在。
PO133数组变量不存在。
PO134需要使用数组变量。
PO135需要局部变量。
PO136意外的数组下标。
PO137调用子程序时自变量不匹配。
PO138调用子程序时自变量的类型不匹配。
PO139非法的控制结构。
PO140步:XX错误的END语句。
PO141步:XX多余的END语句。
PO142步:XX不能以END停止D0。
PO143步:XX在CASE后没有VALUE语句。
PO144步:XX前面缺少IF。
PO145步:XX前面缺少CASE.PO146步:XX前面缺少D0。
PO147步:XX未发现XX的END语句。
PO148步:XX控制结构过多。
PO149变量(或程序)名已存在。
PO150不同类型的变量已存在。
PO151复杂的表达式造成内部缓冲区溢出。
PO152未定义的变量(或程序)。
PO153非法的时钟值。
PO154缺少‘=’。
PO155缺少‘)’。
PO156缺少‘]’。
MOTOMAN 报警
MOTOMAN 报警
1、引言
本文档旨在提供关于MOTOMAN报警的详细信息。
以下章节将介绍报警的各种类型、处理步骤以及相应的法律名词和注释。
本文档为操作人员和技术人员提供参考,以便在报警情况下正确处理和解决问题。
2、报警类型
2.1 运动异常报警
描述:在运动过程中发生异常情况的报警类型。
处理步骤:
- 立即停止的运动。
- 检查是否受到阻碍或碰撞。
- 检查的传感器是否正常工作。
- 尝试重新启动并进行运动测试。
2.2 系统错误报警
描述:系统发生错误导致无法正常工作的报警类型。
处理步骤:
- 检查的电源供应是否正常。
- 检查控制器和计算机系统是否正常连接。
- 检查控制器的软件版本是否最新。
- 联系技术支持团队以获取进一步的帮助和指导。
2.3 安全防护系统报警
描述:的安全防护系统检测到异常情况并发出报警的类型。
处理步骤:
- 确保周围的安全防护设备完整并正常工作。
- 检查安全防护设备的传感器是否受到干扰或损坏。
- 检查安全防护设备的连接是否正确。
- 重置或校准安全防护设备并重新启动。
3、本文档涉及附件
请查阅本文档所附的文件,其中包括详细的报警代码列表、故障排除流程和报警解决方案。
4、法律名词及注释
- :指被程序控制、可编程且具有多种自动操作功能的装置。
- 报警:指系统或组成部分发出的错误或异常情况的通知。
代码错误信息PO100非法的输入数据。
PO101变量太多。
PO102输入数据过大。
PO103非法的PC编号。
PO104非法的机器人编号。
PO105非法程序PO106非法的优先级。
PO107无效的坐标值。
PO108语法错误。
PO109无效语句。
PO110请指明命令的全拼。
PO111当前模式下不能使用该条命令/指令。
PO112不能用D0指令执行。
PO113不是程序指令。
PO114非法表达式。
PO115非法函数。
PO116函数变量非法。
PO117无效变量(或程序)名。
PO118非法的变量型类。
PO119数组下标错误。
PO120括号不成对。
PO121需要的是二进制算子。
PO122非法常数。
PO123非法的原定符。
PO124无效标签。
PO125缺字符。
PO126非法的开关名称。
PO127指定的开关名称需要全拼。
PO128非法格式的分类符。
PO129标签语句重复。
PO130不能定义为数组。
PO131数组的维数大于3。
PO132数组变量已存在。
PO133数组变量不存在。
PO134需要使用数组变量。
PO135需要局部变量。
PO136意外的数组下标。
PO137调用子程序时自变量不匹配。
PO138调用子程序时自变量的类型不匹配。
PO139非法的控制结构。
PO140步:XX错误的END语句。
PO141步:XX多余的END语句。
PO142步:XX不能以END停止D0。
PO143步:XX在CASE后没有VALUE语句。
PO144步:XX前面缺少IF。
PO145步:XX前面缺少CASE.PO146步:XX前面缺少D0。
PO147步:XX未发现XX的END语句。
PO148步:XX控制结构过多。
PO149变量(或程序)名已存在。
PO150不同类型的变量已存在。
PO151复杂的表达式造成内部缓冲区溢出。
PO152未定义的变量(或程序)。
PO153非法的时钟值。
PO154缺少‘=’。
PO155缺少‘)’。
PO156缺少‘]’。
PO157缺少“TO”。
PO158缺少“BY”。
PO159缺少’:‘。
PO160请指定“ON”或“OFF”。
PO161必须指定机器人号。
PO162该指令中不能修改位置数据。
PO163程序名、变量名、文件名等未指定。
PO164非法的机器人网络ID。
PO165步:XX在SCASE后没有SVALUE语句。
PO166步:XX前面缺少SCASE。
P1000电机电源OFF,不能执行程序。
P1001示教模式中不能执行程序。
P1002示教模锁ON,不能执行程序。
P1003外部保持信号输入中,不能执行程序。
P1004程序正在复位中,不能执行程序。
P1005因为外部启动可用,程序不能执行。
P1006因为外部启动禁用,程序不能执行。
P1007在RPS-END步,启动信号未输入。
P1008保持开关有效,程序不能执行。
P1009程序已在运行中。
P1010机器人控制程序已在运行中。
P1011程序不能继续,请用EXECUTE。
P1012机器人正在运动中。
P1013出错中,不能执行,请先复位错误。
P1014程序已在使用中,不能执行。
P1015不能删除,正被其他命令使用中。
P1016不能删除,正在被程序使用。
P1017不能删除,编辑器中的程序。
P1018用KILL或PCKILL取消程序。
P1019PC程序运行中。
P1020示教器操作中,不能运行。
P1021不能用D0命令执行。
P1022不能用MC指令执行。
P1023不能在机器人程序中执行。
P1024语句不能被执行。
P1025函数未设置,不能被执行。
P1026不能KILL运动中的程序。
P1027示教锁ON,不能编辑程序。
P1028不能粘贴。
P1029程序名未指定。
P1030程序被另一进程互锁。
P1031无空闲内存。
P1032无程序步。
P1033程序名已存在。
P1034该程序不可编辑。
P1035记录被禁止,设定[Record Accept]并重新运行。
P1036程序修改被禁止,设定[Accept] 并重新运行。
P1037程序名不能是“calib-load-".P1038程序不存在。
P1039示教器未连接。
P1040在接口板中不能执行该指令。
P1041自动监控指令失败。
P1042NUM程序运行中。
P1043不能在再现模式下执行。
P1044因为电机电源ON,所以不能执行。
P1045设置示教模式及示教锁ON。
P1046接通触发器开关。
P1047未连接机器人,不能选择程序/步。
P1048刹车检查中,不能操作。
P1049程序被锁住。
P1050保护程序已存在。
P1051程序运行中不能解锁保护。
P1052因存储已满,不能复制程序。
P1053因存储器已满,程序复制已被挂起。
P1054请关断触发开关。
P1055请示教在夹紧ON的步骤上轴锁定指示。
P1056请示教在夹紧ON的步骤上解除轴锁定的指示。
P2000关断电机电源。
P2001把保持/运转关打到保持处P2002无外部轴。
P2003定位器型号非法。
P2004不能修改,用户数据已存在。
P2005图形区域错误。
P2006选项被关闭。
P2007正被其他设备执行中,所以不能被执行。
P2008设备未准备好。
P2009文件名非法。
P2010磁盘未准备好。
P2011无效的磁盘格式。
P2012磁盘写保护。
P2013磁盘已满。
P2014文件过多。
P2015不能在只读文件上写入。
P2016不能打开文件。
P2017不能关闭文件。
P2018存储数据日志中。
P2019ADC函数已在使用中。
P2020非法的设备编号。
P2021在该终端上不能执行。
P2022不能使用DOUBLE OX。
P2023协调模式中。
P2024无效的X坐标值。
P2025无效的Y坐标值。
P2026无效的Z坐标值。
P2027不能使用已在接口板中使用的信号。
P2028手臂ID板忙。
P2029轴设置数据不正确。
P2030未知的辅助功能号。
P2031被删除的步是Jump、Call指令的目标步。
P2032WHERE参数输入值错误。
P2033日志记录运行中。
P2034未定义的内存。
P2035无数据。
P2036内存校验错误。
P2037实时路径调节已在运行中。
P2038矩阵计算错误。
P2039不能从FN指令开始循环。
P2040卡未准备好。
P2041加载的卡错误。
P2042卡写保护。
P2043卡电池电量不足。
P2044卡未格式化。
P2045该卡不能格式化。
P2046卡初始化错误。
P2047文件已打开。
P2048卡中文件不存在。
P2049试图打开的文件过多。
P2050卡访问中意外错误。
P2051文件I/O数据序列号非法。
P2052[LSEQ]程序包括不可用的指令。
P2053[LSEQ]步数太多。
P2054[LSEQ]信号变量类型错误。
P2055[LSEQ]程序已在运行中。
P2056[LSEQ]信号编号超出指定范围。
P2057[SerialFlash]不能打开文件。
P2058[SerialFlash]数据读取错误。
P2059[SerialFlash]数据写入错误。
P2060[SerialFlash]文件或路径不存在。
P2061软盘中文件不存在。
P2062[FDD/PC-CARD]经校验,写入数据失败。
P2063[FDD/PC-CARD]校验功能错误响应。
P2064[FDD]无可用空间。
P2065[Multi Disks]装载了错误磁盘。
P2066引导闪存处于禁止写入状态。
P2067[Serial Flash]文件目录错误。
P2068不能执行正在编辑的程序。
P2069[FDD/PC-CARD]设备正在使用中。
P2070不能登录更多的数据。
P2071C/S开关设置为禁止。
P2072[LSEQ]最大的执行循环数。
P2073[LSEQ]其他程序等待执行。
P2074软盘已损坏。
P2075轴XX的通道号不正确。
P2076SAVE/LOAD进行中。
P2077[Serial Flash]访问错误。
P2078[Serial Flash]上载或下载失败。
P2079卡已满。
P2080不能执行,因为通道已被分配给轴号。
P2081P2082P2083用户履历未创建。
P2084用户履历登录数已改变。
P2085用户履历不能登录,无空余存储空间。
P2086用户履历未登录。
P2087登录的用户履历数据与指定数据种类不同。
P2088不能装入不正确的补偿参数。
P2089P2090没有伺服规格的伺服数据。
P2091[Serial Flash]文件或目录已存在。
P2092[Serial Flash]此目录不是空的。
P2093[Serial Flash]这里没有写入的空间了。
P2094[Serial Flash]不能访问只读文件。
P2095可选CPU没有响应。
P2096码垛动作中断后循环启动不能执行。
P2097码垛动作过程中不能变更步骤。
P2098此轴不能无限旋转。
P2099不能将码垛状态变更为”开“。
P2100宏的执行错误。
P2101include文件嵌套过深。
P2102文件或文件夹不存在。
P2103USB闪存未插入。
P2104软件下载失败。
P2105USB闪存的可使用空间不足。
P2106小型闪存的可使用空间不足。
P2107系统正在下载软件。
P2108在USB闪存中没有软件。
P2109由于同时操作信号在输入中,因此不能执行程序。
P2110[USB/CF]文件写入错误。
P2111请把旋转轴返回到原点位置。
P2112文件名太长。
P2113由KI命令不能开始循环操作。
P4500FIELD-BUS)接口未被激活。
P4501DEVNET)节点XX不在扫描列表中。
P4502DEVNET)已在该模式。
P4503信号编号重复。
P4504FIELD-BUS)超出最大信号数。
(最大XX)P4505CC-LINK)版本不匹配。
P4506EN/IP-M)已经处于指定模式。
P4507FIELD-BUS0)不能执行老版本的ANYBUS卡固件。
P4508FIELD-BUS0)不能与交互卡通信。
P4509FIELD-BUS0)交互卡型号错误。
P4510FIELD-BUS0)卡的初始化没有完成。
P5000等待焊接完成。
P5001等待缩回或伸出位置信号。
P5002点焊程序正在运行。
P5003外部轴型号和焊枪型号数据不匹配。
P6000步XX的偏移位置超出范围。
P6001源程序中的步XX超出运动范围。
P6002指定的喷涂数据库不存在。
P6003因为重现操作被挂起,程序不能执行。
P6004吹扫处理中,不能执行。
P6005因为机器人不连接,不能执行。
P6006在喷涂区域的结束点不能指定圆弧插补。
P6007喷涂区域内示教点过多。
P6008喷涂区域内示教点之间的命令过多。
P6009喷涂区域内示教点缺少。
P6010pg编号以外的程序名被选择。
P6011不能动作。
请更改到各轴插补或添加示教点。