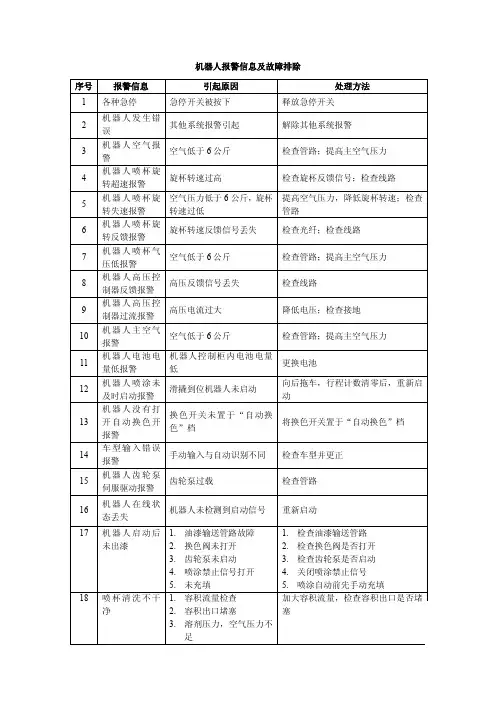
IGM机器人寻位报警维修
- 格式:doc
- 大小:3.94 MB
- 文档页数:4
机器人设备常见故障的识别与排除1. 引言随着现代科技的快速发展,机器人设备在工业生产、医疗护理、家庭服务等领域的应用越来越广泛。
然而,正因为机器人设备的复杂性和高度智能化,常常会面临各种故障问题。
本文将从机器人设备常见故障的识别与排除两个方面探讨,帮助读者更好地应对机器人设备故障。
2. 故障的识别2.1 机器人运动异常机器人设备在运动过程中出现异常情况往往意味着可能存在故障。
以下是几种机器人运动异常的故障识别方法:- 手臂运动不稳定:可能是由于电机驱动问题导致的,可以检查电机连接和供电情况。
- 关节卡滞或无法运动:可能是由于关节齿轮磨损或润滑问题导致的,可以尝试清洁和润滑关节部位。
- 运动过程中出现奇怪的声音:可能是由于传动装置损坏或松动导致的,可以检查传动零部件并进行调整或更换。
2.2 传感器异常机器人设备依赖各种传感器来感知环境和执行任务,当传感器发生异常时,会影响机器人正常的工作状态。
以下是几种常见传感器异常的故障识别方法:- 视觉传感器无法识别目标物体:可能是传感器镜头脏了或者被遮挡了,可以尝试清洁镜头或者确认传感器周围没有遮挡物。
- 超声波传感器检测失败:可能是传感器故障或者安装位置不合适导致的,可以检查传感器状态和位置是否正确。
- 接触式传感器无响应:可能是传感器连接问题或者传感器本身故障导致的,可以检查连接线路和更换传感器。
3. 故障的排除3.1 硬件故障排除当机器人设备发生硬件故障时,有几种常见的排除方法:- 检查电源供应:确保机器人设备正常供电,排除电源线路故障。
- 检查电缆和插头连接:检查机器人设备各个部件的电缆和插头连接是否松动或损坏。
- 更换故障部件:对于发现的具体故障部件,可以尝试更换新部件来解决问题。
3.2 软件故障排除机器人设备的软件故障通常需要进行一系列的排除步骤:- 检查程序错误:检查机器人设备的程序是否存在逻辑错误或者语法错误,对错误进行修正。
- 重新安装操作系统:如果机器人设备的操作系统出现问题,可以尝试重新安装操作系统来恢复正常运行。
机器人工程中的机器人维护与故障排除技术在当今科技飞速发展的时代,机器人在各个领域的应用日益广泛,从工业生产中的自动化装配线到医疗领域的手术辅助机器人,再到家庭服务中的智能清洁机器人,机器人已经成为我们生活和工作中不可或缺的一部分。
然而,随着机器人使用的增加,机器人的维护与故障排除技术变得至关重要。
有效的维护可以延长机器人的使用寿命,提高其工作效率和稳定性,而及时准确的故障排除则能够减少停机时间,降低生产损失。
首先,我们来了解一下机器人维护的重要性。
机器人通常在恶劣的环境中长时间运行,承受着高强度的工作负荷。
定期的维护能够确保机器人的各个部件处于良好的工作状态,预防潜在的故障。
这就好比我们定期给汽车做保养,更换机油、滤清器等,以保证汽车的性能和安全性。
对于机器人来说,维护工作包括清洁、润滑、检查电气连接、校准传感器等。
清洁可以防止灰尘和杂物进入机器人内部,影响其正常运行;润滑则能够减少机械部件之间的磨损,延长使用寿命;检查电气连接可以确保电力传输的稳定性,避免短路等故障;校准传感器则能保证机器人对环境的感知准确无误。
那么,如何进行有效的机器人维护呢?这需要制定一套完善的维护计划。
维护计划应根据机器人的使用频率、工作环境和运行特点来制定。
一般来说,分为日常维护、定期维护和预防性维护。
日常维护通常由操作人员在每天工作结束后进行,包括简单的清洁和检查。
定期维护则由专业的维护人员按照一定的时间间隔进行,比如每周、每月或每季度。
这时候需要对机器人进行更深入的检查,如检查机械部件的磨损情况、更换易损件、测试控制系统等。
预防性维护则是基于对机器人运行数据的分析,预测可能出现的故障,并提前采取措施进行防范。
在机器人维护中,对机械部件的维护是关键之一。
机器人的机械结构复杂,由众多的关节、连杆和传动装置组成。
这些部件在长期运行中容易出现磨损、松动和变形等问题。
例如,机器人的关节部位如果磨损严重,会导致运动精度下降,影响工作质量。
现代工业机器人调整及故障排除1. 简介现代工业机器人在生产过程中扮演着重要的角色。
为了确保机器人的稳定运行和高效性能,定期调整及故障排除是必不可少的。
本文档将为您提供关于现代工业机器人调整及故障排除的专业知识和详细步骤。
2. 机器人调整2.1 前期准备在进行机器人调整之前,请确保以下准备工作已完成:- 关闭机器人电源,确保安全。
- 根据需要调整的机器人部件,准备相应的工具和设备。
- 查阅相关机器人说明书,了解调整方法和注意事项。
2.2 调整步骤以下是一些基本的调整步骤,具体步骤可能因机器人型号和制造商而异:1. 校准机器人关节:使用专用工具校准机器人的各个关节,确保运动精度。
2. 调整末端执行器:根据需要,调整末端执行器的姿态和位置,以适应不同任务。
3. 优化路径和轨迹:通过软件优化机器人的运动路径和轨迹,提高运行效率。
4. 调整速度和力度:根据任务需求,调整机器人的运动速度和力度。
3. 故障排除3.1 故障诊断当机器人出现故障时,首先进行故障诊断。
常见故障现象包括:- 无法启动或运行- 运动异常- 末端执行器无法正常工作- 报警提示3.2 故障排除步骤以下是一些常见的故障排除步骤:1. 检查电源和连接:确保机器人电源正常,所有连接线缆无损坏。
2. 查看报警日志:查阅机器人系统的报警日志,了解故障原因。
3. 检查硬件故障:检查机器人各部件是否有损坏,如电缆、传感器等。
4. 软件故障排除:根据故障现象,通过软件进行排查和修复。
3.3 故障案例分析以下是两个故障案例的分析:案例1:- 故障现象:机器人无法启动。
- 故障原因:电源连接问题。
- 解决方案:检查电源连接,修复损坏的线缆。
案例2:- 故障现象:机器人运动异常。
- 故障原因:关节校准不准确。
- 解决方案:重新校准关节,调整运动参数。
4. 总结现代工业机器人的调整及故障排除是保证生产效率和设备寿命的关键。
通过本文档的学习,您应该已经掌握了调整和故障排除的基本知识和步骤。

工业机器人常见故障及维修方法
以发那科机器人为例!
1 无法开机
检查及维修
控制器部件
检查1:控制器断路器开且没有跳闸
维修:合上断路器
检查2:查看电源板(PSU)上的LED指示灯(GREEN)是否亮。
维修:如果LED指示灯没亮可能是PSU的200V供电电源没有或PSU上的F1保险丝毁坏:
1如果200V电源没有请检查供电线路
2 如果200V电源已提供给PSU请切断电源:
A F1保险丝毁坏请参照维修2
B F1保险丝没有毁坏请更换PSU
维修2:保险丝毁坏故障原因及应对措施
A 查看PSU与其他电路板间的CP2、CP3连接件是否接触良好。
B 如果浪涌吸收VS1短路请更换VS1定货号:A50L-2001-0122#G431K
C 二极管DB1短路
D 后备电源模块H1毁坏
如果B或C有故障请更换相应备件
F1定货号:A60L-0001-0396#8.0A
检查及维修
控制器部件。
发那科机器人报警处理本文将介绍发那科机器人报警处理的方法。
首先,让我们了解一下发那科机器人。
发那科(FANUC)是一家知名的日本工业机器人制造商,其机器人产品广泛应用于汽车制造、机械加工、食品包装等领域。
为了确保机器人的正常运行,当出现故障或异常时,需要对其进行及时的报警处理。
在进行报警处理前,需要先进行故障诊断。
诊断的方法包括观察机器人各部分的电压、电流、温度等参数,以及检查机器人各部分的连接是否牢固、传感器是否正常工作等。
一旦发现问题,需要及时采取相应的措施进行处理。
在进行报警处理时,需要注意以下几点:1、保持冷静:当机器人出现故障时,操作者需要保持冷静,不要惊慌失措。
2、记录信息:操作者需要记录故障发生时的相关信息,例如故障代码、发生时间、机器人状态等。
3、检查电源:确保机器人电源连接正常,电压稳定。
4、检查电缆连接:检查机器人各部分之间的电缆连接是否牢固,是否有破损或短路的情况。
5、检查传感器:检查机器人各部分的传感器是否正常工作,例如限位开关、碰撞传感器等。
6、遵循安全规程:在处理报警时,需要遵循安全规程,确保操作者和其他人员的安全。
处理发那科机器人报警的步骤如下:1、根据故障信息进行分析:根据记录的故障信息,分析故障的可能原因。
2、初步检查:进行初步检查,例如检查电源、电缆连接、传感器等。
3、排除故障:根据分析的结果,采取相应的措施排除故障。
例如更换损坏的部件、调整机器人的位置等。
4、进行测试:在排除故障后,需要进行测试,确认问题是否已经解决。
5、记录经验:在处理完报警后,需要记录相关的经验,以便以后遇到类似问题时可以快速处理。
本文介绍了发那科机器人的报警处理方法,包括故障诊断和报警处理的步骤。
在实际操作中,需要注意保持冷静、记录信息、检查电源、检查电缆连接、检查传感器等步骤。
此外,需要遵循安全规程,确保操作者和其他人员的安全。
通过本文的介绍,可以让操作者更好地了解发那科机器人的报警处理方法,提高机器人的运行效率和使用寿命。
1、伺服-001操作面板紧急停止。
SRVO-001 Operator panel E-stop[现象]:按下了操作箱/操作面板的紧急停止按扭。
SYST-067 面板HSSB 断线报警同时发生,或者配电盘上的LED(绿色)熄灭时,主板(JRS11)-配电盘( JRS11)之间的通信有异常,可能是因为电缆不良、配电盘不良、或主板不良。
[对策 1]:解除操作箱/操作面板的紧急停止按扭。
[对策 2]:确认面板开关板( CRM51 )和紧急停止按扭之间的电缆是否断线,如果断线,则更换电缆。
[对策 3]:如果在紧急停止解除状态下触点没有接好,则是紧急停止按扭的故障。
逐一更换开关单元或操作面板。
[对策4]:更换配电盘。
[对策5]:更换连接配电盘(JRS11)和主板( JRS11)的电缆。
在采取对策 6 之前,完成控制单元的所有程序和设定内容的备份。
[对策6]:更换配电盘。
注释:SYST-067 面板 HSSB 断线报警同时发生,或RDY LED熄灭时,有时会导致下面的报警等同时发生。
(参阅示教操作盘的报警历史画面)2、伺服 -001操作面板紧急停止伺服 -004栅栏打开NjーDz -007外部紧急停止伺服 -204外部( SVEMG 异常)紧急停止伺服 -213保险丝,熔断(面板 PCB)伺服 -280SVOFF 输入伺服-002示教操作盘紧急停止SRVO-002 Teach pendant E-stop[现象]:按下了示教操作盘的紧急停止按扭。
[对策 1]:解除示教操作盘的紧急停止按扭。
[对策2]:更换示教操作盘。
伺服-003紧急时自动停机开关SRVO-003 Deadman switch released[现象]:在示教操作盘有效的状态下,尚未按下紧急时自动停机开关。
[对策1]:按下紧急时自动停机开关并使机器人操作。
[对策2]:更换示教操作盘。
3、伺服-021SRDY 断开(组: i轴: j )SRVO-021 SRDY off (Group:i Axis:j)[现象]:当 HRDY 断开时,虽然没有其他发生报警的原因, SRDY 处在断开状态。
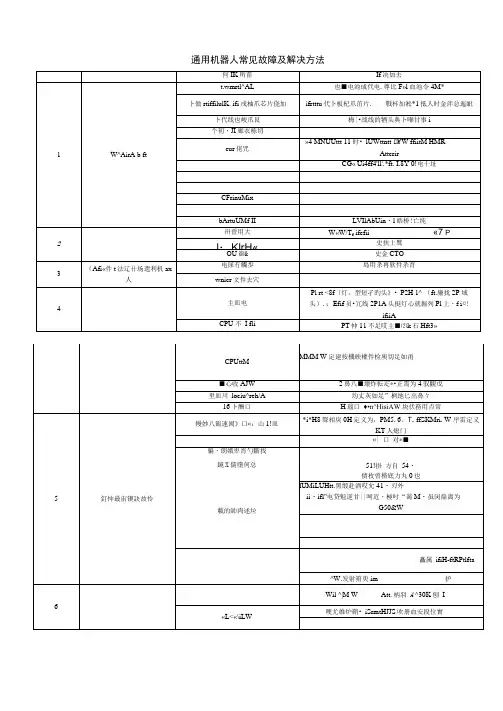
通用机器人常见故障及解决方法电机未能驱动机器人原地打转不前进不进房间门和不出房间门18 灭火机器人故障找不到火源风扇无法启动外界光强机器人运行速度慢控制端口与驱动板连线不正常程序未定义前、左侧避障距离未调好,一般调200MM 较好,或一侧找到火源指示灯亮左避障距离过近过远和前避障距离过远造成参照灭火模块故障解决方法电量不足或考虑用锂电池改变光电接收管角度,机器人两侧光电接收管为伞面搜球,找不到足球19 足球机器人故障中间光电接收管(三只眼模块)接收到信号为直线踢球找球电位器灵敏度调高场地方向判断错误外界光强机器人运行速度慢、不灵活找不到光投篮方向不准参照电子罗盘故障解决方法调节找足球电位器敏感度不易过远,否则找球指示灯常亮,一般调至1/2-3/4 场地距离为好12V 电量不足或考虑用锂电池、程序校正参照光电接收模块故障解决方法集电子罗盘、光电接收模块、程序校正来综合调节参照光敏模块故障解决方法参照接近开关故障解决方法检查电机连线及12V 供电不足及时充电、建议12V 供电用锂电池20 篮球机器人故障未按轨迹取球未按定点取球扫、传、投电机有误运行速度慢21 跨栏机器人故障未按轨迹行走滑出擂台场地巡线光敏模块参照光敏模块故障解决方法前、后光敏模块未调好,参照光敏模块故障解决方法22 擂台机器人故障12V 电量不足或考虑用锂电池前、后、两面采用铲式结构为好采用色标开关巡线机器人走偏23 越野机器人故障击落乒乓球不准确推落物体后机器人也随之落下机器人上坡走偏机器人走偏24 打靶机器人故障第2、3、4 只乒乓球流球不准投球不准到达 D 点返回找不到引导线机器人走不直机器人通过限速丘走偏机器人通过限速丘时火炬亦滑落交接区对接不准组装时底盘四个电机要对称且保持在同一水平面适当增加模块、程序校正调节左避障距离或击打电机杆高度机器人前避障距离过近,稍远一些程序校正采用色标开关巡线多方法搭建、适当增加管型材料投球电机要有力、靶芯高低也可用程序控制电机来实现采用色标开关和程序相结合的方法机器人右侧采用色标开关场地边沿巡线式,结合程序控制机器人前方采用色标开关寻障加速和右侧采用色标开关巡线相结合方式,注意:碰撞开关要安装在巡障色标开关前面注意:电磁固定方式1、 2 号机器人右侧均采用色标开关场地边沿巡线式及结合程序控制25 火炬传递 1 号机器人故障(碰撞、电磁式)交接区火炬未释放交接区对接不准交接区火炬吸拾不过来26 火炬传递 2 号机器人故障(碰撞、永磁式)机器人走不直机器人通过限速丘走偏机器人通过限速丘时火炬亦滑落检查碰撞开关及引线,另外,可检查程序永磁固定方式可适量放宽检查 1 号机器人碰撞开关及引线机器人右侧采用色标开关场地边沿巡线式机器人前方采用色标开关寻障加速和右侧采用色标开关巡线相结合方式,注意:碰撞开关要安装在巡障色标开关前面注意:永磁固定方式27 火炬传递 1 号机器人故障(碰撞、漏斗式)机器人通过限速丘走偏机器人前方采用色标开关寻障加速和右侧采用色标开关巡线相结合方式,注意:碰撞开关要安装在巡障色标开关前面交接区对接不准或抓斗未释放交接区火炬未释放交接区对接不准交接区火炬抓拾不过来28 火炬传递 2 号机器人故障(碰撞、抓斗式)机器人通过限速丘走偏程序无法下载29 4.8V 电池损坏供电不足主板稳压芯片不能正常工作主板端口不能正常工作模块不能正常工作30 12V 电池损坏供电不足机器人运行速度减慢机器人走不直抓斗位置适量台高或检查抓斗电机连线检查碰撞开关及抓斗电机引线,另外,可检查程序抓斗搭建可适量调整检查1、2 号机器人碰撞开关及引线, 2 号先抓,1 号后漏机器人右侧采用色标开关场地边沿巡线式机器人前方采用色标开关寻障加速和右侧采用色标开关巡线相结合方式,注意:碰撞开关要安装在巡障色标开关前面将电池拆下,用万用表测量:正常充满电的电池电压为 1.4V 左右,长期不充电的电池电压最低应达到0.9V 以上同上机器人运行灵活性差。
(1) SRVO–001 SVAL1 Operator panel E–stop(解释)按下在操作员面板或是操作箱上的紧急停机按钮。
如果SYST-067(面板HSSB 断开连接)警报也同时发生,或是如果在面板上LED 指示灯(绿色)关闭不发光,主板(JRS11)和面板(JRS11)通讯异常。
主板和面板电路板之间的电缆连接可能松动。
或者,电缆,面板电路板或是主板可能有故障。
注意:如果LED 指示灯是关闭不发光的,下面的警报也会产生。
SRVO–001 Operator panel E–stop.SRVO–004 Fence open.SRVO–007 External emergency stop.SRVO–199 Control stop.SRVO–204 External (SVEMG abnormal) E–stop.SRVO–213 Fuse blown (Panel PCB).SRVO–277 Panel E–stop (SVEMG abnormal).SRVO–280 SVOFF input检查显示在示教盒上显示的警报历史。
(措施1)释放在操作员面板或是操作员箱上被按下的紧急停机按钮。
(措施2)检查紧急停机开关连接器CRT8 的电线连接,如果有断开的电线,替换整个线路。
(措施3)当紧急停机按钮在释放的位置,检查接线端和开关的连接,如果没有连接,替换开关。
如果有连接,替换操作员面板PCB。
注意:在执行措施4 前,完成整个控制器的备份来保存所有你的程序和设置。
(措施4)替换主板(2) SRVO–002 SVAL1 Teach pendant E–stop(解释)在示教盒上的紧急停机按钮被按下。
(措施1)释放在示教盒上的紧急停机按钮。
(措施1) 替换示教盒。
(3) SRVO–003 SVAL1 Deadman switch released(解释) 示教盒可以工作,但是deadman开关没有被按下. deadman开关是一个三方向开关。
机器人操作故障信息列表电,按下使能键按钮时,确保系统已上电,171伺服驱动器N报警伺服驱动器N有错误报警。
伺服焊钳报警。
检查伺服驱动器报警原因,予以排除340自动清内存:版本号不匹配系统进行了自动清内存联系专业技术人员341自动清内存:系统参数不匹配系统进行了自动清内存联系专业技术人员0x0020: IO量错,电路板电源24V+12V-12V IO量错,电路板电源24V+12V-12V原因为位控板24V、pow、CH信号插错位或没插IO量错,电路板电源24V+12V-12V解决方法为检查位控板24V、POE、CH信号插头及连线。
604I/O板错误字101或102或1041.101为CAN通信故障,原因为CAN总线电缆断开或接触不良,或104重启而IO板没重启,或者CAN板卡故障1.101解决方法为更换CAN线,或者更换IO板。
2.102为IO板卡异常重启 2.102解决方法为更换IO板。
3.104为Can通信超时 3.104解决方法为更换CAN线,或者更换IO板。
606位控板N返回数据超时主控板未接收到位控板N的数据信息检查主控板与位控板之间的连线(CAN线)或者检查位控板拨码是否拨对,位控板跳冒是否拔掉607硬限位检测到硬限位信号检测是否到达机械硬限;校验硬限位信号;检查硬限位开关线路608安全门1打开检测到安全门打开在安全门打开状态进行合理操作707IO板1错误:+错误字708IO板2错误:+错误字8001、2轴绝对码盘未返脉冲板未向主控板返回1、查看脉冲板与主控板之间总回2轴的绝对码盘信息线连接情况8013、4轴绝对码盘未返回脉冲板未向主控板返回3、4轴的绝对码盘信息查看脉冲板与主控板之间总线连接情况8025、6轴绝对码盘未返回脉冲板未向主控板返回5、6轴的绝对码盘信息查看脉冲板与主控板之间总线连接情况803脉冲板IO及状态字未返回脉冲板未向主控板返回IO及状态字信息查看脉冲板与主控板之间总线连接情况8041-3轴接收相对位置点被覆盖一个节拍内脉冲板接收到两次码盘数据1、确认主板驱动及FPGA程序2、致命错误,请联系设计人员8054-6轴接收相对位置点被覆盖一个节拍内脉冲板接收到两次码盘数据1、确认主板驱动及FPGA程序2、致命错误,请联系设计人员806脉冲板接收到无定义的RC指令脉冲板接收CAN数据时发生错误1、更换脉冲板2、致命错误,请联系设计人员807脉冲板等待RC指令超时1、确认操作是否正确2、致命错误,请联系设计人员8101号IO板数据未返回1号IO板数据未返回检查1号IO板总线连接情况8112号IO板数据未返回2号IO板数据未返回检查2号IO板总线连接情况812码盘值无效RC没有读取到码盘值1、确认RC程序 2、确认脉冲板DSP程序 3、更换脉冲板813813 Alam:axis +报警驱动器的ID 某ID的驱动器产生报警检查伺服驱动器报警原因,予以排除814速度超界:axis +轴数主控板检测出速度超过设定限制值1、检查主板参数中(RC参数)速度限设定值 2、检查减速比 3、检查驱动器参数815跟踪差超界: axis +轴数主控板检测出跟踪差超过设定限制值1、检查主板参数中(RC参数)速度限设定值 2、检查减速比 3、检查驱动器参数816看门狗报警脉冲板内部的错误报警联系脉冲板软件开发人员817硬件安全开关输入无效脉冲板内部的错误报警联系脉冲板软件开发人员820第7、8轴绝对码盘未返回脉冲板未向主控板返回第7、8轴的绝对码盘信息查看脉冲板与主控板之间的总线连接情况8232号脉冲板IO状态字未返回2号脉冲板未向主控板返回IO及状态字信息查看脉冲板与主控板之间的总线连接情况8242号:1-3轴接收相对位置点被覆盖脉冲板一个节拍接收到两次码盘数据致命错误,请联系设计人员8252号:4-6轴接收相对位置点被覆盖8262号:脉冲板接收到无定义的RC指令2号脉冲板接收CAN数据时发生错误1、更换脉冲板2、致命错误,请联系设计人员830脉冲板跟踪差超界:axis +轴数脉冲板内部检测到当前跟踪差超过设定限值1、检查脉冲板参数中(PMC参数)跟踪差设定值 2、检查减速比 3、检查QEP是否丢码 4、检查485是否丢码831脉冲板速度超界:axis+轴数脉冲板内部检测到当前速度限超过设定限值1、检查主板参数中(RC参数)速度限设定值 2、检查减速比 3、检查驱动器参数8372号:看门狗报警脉冲板内部安全检测联系专业技术人员8382号:硬件安全开关输入无效脉冲板内部安全检测联系专业技术人员840已发生系统错误,不允许上电操作CAN通讯过程中发生错误联系专业技术人员841不满足上电输出条件上电输出条件:脉冲板正常、硬限位正常、CAN通讯正常、暂停按钮正确检查硬件线路842上电输出后没有应答上电输出后256个节拍仍然没有上电应答返回检查上电应答硬件线路843驱动器未准备好上电应答后256个节拍没有驱动器的READY信号返回1、检查驱动器参数2、检查驱动器硬件线路844驱动器未返回制动器解除上电应答后256个节拍没有驱动器的BRKOFF信号返回检查驱动器硬件线路845未接收到松报闸应答发送松报闸后16个节拍没有松报闸应答返回检查驱动器硬件线路846请解除急停信号伺服上电时检测到急停安全继电器错误检查急停安全继电器及相关硬件线路847远程模式中,禁止本地伺服上电在远程控制模式下,按了本地伺服上电按钮1、远程模式下,用外部伺服上电信号进行上电。
igm焊接机器人轴控制板错误的分析及处理作者:杨波来源:《中国科技博览》2017年第10期[摘要]本文从igm焊接机器人系统控制原理出发,引出igm焊接机器人轴控制板错误故障的一般处理方法,为生产中快速解决故障打下基础。
[关键词]igm焊接机器人轴控制板错误总线通讯参数文件中图分类号:TP55 文献标识码:A 文章编号:1009-914X(2017)10-0058-02一、引言Igm焊接机器人在轨道交通和工程机械领域有着广泛的应用,可实现各种材料的自动化焊接,在生产中担任着重要角色。
Igm焊接机器人系统由机械手6轴及外部轴组成,外部轴数量根据配置不同有所差异,每个机器人轴或外部轴均由一个单独的伺服器驱动。
机器人系统采用全数字化控制技术,包括系统各部分与控制柜和焊接电源之间的通讯皆为数字化控制,整个系统采用总线连接,控制系统采用PC(intel cpu)平台的工业计算机,示教编程采用窗口(windows)界面,编程简单,控制精度高。
机械手采用高自由度的铰接轴和中空6轴设计,焊枪可达性高。
目前应用最多的机械手型号有Rti2000、Rti330及Rti370,其控制原理基本相同,在实际故障处理中,故障处理方法基本类似。
二、控制原理分析根据igm焊接机器人控制原理图得知(见图1),机器人整体通讯分为6条总线,分别为机器人内部6轴的INTERBUS总线、外部轴通讯的HEDABUS总线、机器人与外围设备通讯的CANBUS总线、控制机器人安全的ESCBUS总线、RS232总线及RS422总线,这6条通讯总线由MFC多功能板控制协调处理。
MFC多功能板插在计算机主板上,内部轴控制板与外部轴控制板叠加安装在MFC多功能板上。
RDW控制板通过RS422串行总线与内部轴控制板进行通讯,用于实时监测机械手6个轴编码器的位置。
控制机器人内部轴与外部轴运动的INTERBUS总线与HEDABUS总线都是采用串联控制形式,因此当通讯发生异常时,其故障提示总是从最近的运动轴报起。
发那科机器人报警处理(中文).pdf3 按下 F2[RELEASE (释放)] 以释放超行程轴。
4 按住 shift 键,按下警告清除按钮。
5 按住 shift 键,按下微动键把工具沿超行程轴线微动到可移动的有效范围内。
从损坏的腕部警告复原(SERVO-006 )步骤: 1 按住 SHIFT 键,然后按下 RESET 键。
2 按住 SHIFT 键的同时,按下正确的微动键以把机器人移到其能被维修的位置。
从一个脉冲不匹配警告,BZAL 警告,RCAL 警告复原(SRVO-038,062,063 )步骤:1 按下 MENUS 键,显示界面菜单。
2 按下“0--NEXT ”,然后在下个页面选择“6 SYSTEM”。
按下F1 “[TYPE(类型)] ”,然后选择“Variables ”。
显示系统变量界面。
3 把系统变量$MCR.$SPC_RESET 设为TRUE 。
(这个系统变量很快会被自动设回FALSE )。
4 按下 RESET 键以释放警告。
提示:即使检测到一个脉冲计数不匹配警告,该控制数据可能会被纠正。
如果该控制数据被纠正,控制不需要被执行。
只要把$DMR_GRP.$MASTER_DONE 设为真,然后在位置界面上选择6 MASTER/CAL 。
从其他警告复原步骤:1 清除该警告的引发源。
例如,纠正程序。
2 按下 RESET 键来重置该警告。
然后,教导盒界面上的警告信息消失。
ALARM LED (发光二极管)灯灭。
C.2 警告代码SRVO 错误代码(ID=11 )SRVO-001SERVO Operator panel E--stop 可能原因:操作面板上的紧急停止按钮被按下。
解决方法:顺时针拧动紧急停止按钮以松开此按钮,并按下 RESET (重启)。
SRVO-002 SERVO Teach pendant E--stop 可能原因:教导盒上的紧急停止按钮被按下。
IGM龙门机器人维护与保养摘要:机械设备是企业生产的坚实基础,有了设备的良好运行,才能保证工艺生产的连续稳定。
凭借生产操作稳定、减轻劳动强度、提高劳动生产效率等优点,IGM龙门机器人被广泛应用于铁路装备行业。
为使IGM机器人设备综合效用得到最大发挥,树立“维护保养为主,计划检修为辅”的宗旨,结合生产现状,将IGM日常维护检查分为五级:日检查及维护、周检查及维护、月检查及维护、半年检查及维护及每年的全面检查及维护。
关键词:IGM龙门机器人;维护;保养一、日检查及维护首先取掉气嘴并清理杂物。
用气体流量计检查气嘴处的气体流量;(大于18 L/min)检查送丝轮,对送丝轮里的杂物进行清理。
检查焊枪安全保护功能及所有急停按钮。
焊机开启后目测检查循环水的流量情况,检查激光冷却水循环是否完好。
接下来检查水,压缩空气监示器的功能;检查清理送丝管;检查激光保护片是否丢失或污损,及时更换新的保护片。
最后作业前检查设备运行路径上是否有干涉障碍物。
二、周检查及维护(在每周开始工作前或周末进行)进行日检查中要求的所有检查,并擦洗机器人手臂。
首先读入参考程序并检查TCP,如果不正确,通过三个调整螺丝调节焊枪的位置。
清理导电嘴座的里面及外部,确保无杂物,检查焊枪处的气嘴传感线是否断线,焊枪排烟系统软管是否变形,取出送丝软管并予以清理或更换;然后检查送丝马达电流,拉丝马达电流在1.0A以下,推丝马达电流在1.5A以下。
检查软管束表面是否有损坏。
如果皮套上有洞,则予以修补。
检查焊机处冷却水的水位,如发现水位下降很快,应及时检查整个循环系统是否有漏水的地方,添加专用的冷却液;用量杯测量水流量,并检查报警流量,保证报警流量在1L/min。
最后检查并清理空气处理装置处的压缩空气过滤器,检查急停装置的功能,查看防飞溅液的油位并补充专用防飞溅液。
清理排烟装置的粗分离器,如果焊接烟尘吸力不足,则需要更换纸滤芯。
三、月检查及维护(在每月开始工作之前进行)检查操作面板上操作时间计数器,是否到下一个润滑周期。
3 按下F2[RELEASE(释放)]以释放超行程轴。
4 按住shift键,按下警告清除按钮。
5按住shift键,按下微动键把工具沿超行程轴线微动到可移动的有效范围内。
从损坏的腕部警告复原(SERVO-006)步骤: 1 按住SHIFT键,然后按下RESET键。
2 按住SHIFT键的同时,按下正确的微动键以把机器人移到其能被维修的位置。
从一个脉冲不匹配警告,BZAL警告,RCAL警告复原(SRVO-038,062,063)步骤:1 按下MENUS键,显示界面菜单。
2 按下“0--NEXT---”,然后在下个页面选择“6 SYSTEM”。
按下F1“[TYPE(类型)]”,然后选择“Variables”。
显示系统变量界面。
3 把系统变量$MCR.$SPC_RESET设为TRUE。
(这个系统变量很快会被自动设回FALSE)。
4 按下RESET键以释放警告。
提示:即使检测到一个脉冲计数不匹配警告,该控制数据可能会被纠正。
如果该控制数据被纠正,控制不需要被执行。
只要把$DMR_GRP.$MASTER_DONE设为真,然后在位置界面上选择6 MASTER/CAL。
从其他警告复原步骤:1 清除该警告的引发源。
例如,纠正程序。
2 按下RESET键来重置该警告。
然后,教导盒界面上的警告信息消失。
ALARM LED (发光二极管)灯灭。
C.2 警告代码SRVO 错误代码(ID=11)SRVO-001SERVO Operator panel E--stop可能原因:操作面板上的紧急停止按钮被按下。
解决方法:顺时针拧动紧急停止按钮以松开此按钮,并按下RESET(重启)。
SRVO-002 SERVO Teach pendant E--stop可能原因:教导盒上的紧急停止按钮被按下。
c-671解决方法:松开教导盒上的紧急停止按钮。
SRVO-003 SERVO Deadman switch released可能原因:当开启教导盒时没有按下特殊手持式开关按钮。
关于matering的相关报警及处理方法1.pluse mismatch(A:*;G:*)出现该报警的原因为脉冲编码器内数据与机器人控制器内数据不一致.以下为几种可能产生该报警情况:一)机器人关机后由于外力作用是机器人某些轴移动,开机后该轴会产生该报警.二)将不是当前机器人的mastering数据文件导入当前机器人中.三)将机器人机械部分连接到其他控制器上.四)其它未知原因.对于第一种情况,即控制器内Mastering数据正确的前题下,更改系统变量$MCR.$SPC_RESET FLASE----TRUE-----FLASE$DMR_GRP.$MASTER_DONE FLASE----TRUEPOWER Off/ON对于后面两只情况,由于控制器内mastering数据改变,需要重新输入正确的mastering数据(可以参照Data Sheet),然后再更改系统变量.如果没有正确的mastering数据,则需要Zero Position Master来完成.2.Bzal Alarm(A:*;G:*)产生此报警的原因为编码器内SRAM数据丢失.以下为可能产生此报警的情况一)机器人机械部电池掉电;二)连接编码器电缆拔出.处理方法:进入Master/Cal画面,按下RES_PCA,清除报警.Power Off/ON开机后出现pulse not established(A:*;G:*)3. pulse not established(A:*;G:*)产生此报警原因为编码器SDRAM数据丢失后,编码器零位脉冲没有建立.处理方法:将该轴运动,角度大于20°,脉冲计数大于53000,使编码器能够建立零位脉冲.此时需要作单轴或者Zero Position Mastering,对于该轴原来的Mastering Data已经没有意义.。
IGM焊接机器人寻位故障维修
一、引言
斗杆、动臂作为挖掘机的易损部件、受力部件,其焊接质量直接影响着整车的质量及使用效能。
为提高产品质量、焊接稳定性及工作效率,改善工人的劳动条件和降低劳动强度,山推工程机械结构件有限公司引进奥地利IGM焊接机器人,用于斗杆、动臂、上下车架的焊接生产。
二、设备简介
IGM焊接机器人系统由机器人本体、控制系统、变位机、示教器、远程控制盒、跟踪系统、焊接系统和应用软件等组成。
控制系统采用采用奔腾CPU、德国KUKA控制柜及全数字式信号通讯,能控制机器人6各轴,龙门式可扩展X、Y、Z轴、变位机轴及旋转轴共计5个外部轴,跟踪系统采用接触式喷嘴传感器,电弧传感器两种跟踪方式,可实现对V型焊、坡口焊、角焊焊等多种形式焊缝的跟踪,焊接系统采用福尼斯全数字化控制的逆变焊接电源。
我公司IGM机器人是由奥地利IGM公司生产,采用德国KUKA控制系统的RTI330系列机器人。
三、故障现象
焊接机器人正常工作时应为喷嘴碰触到工件后立即回缩,接着寻找第二个点。
此次出现的故障现象为“喷嘴接触到工件后焊枪没有弹回,而是一直向下压直到出现焊枪安全保护,驱动关闭报警”。
喷嘴传感用于焊前对对实际焊缝寻踪定位
四、分析
该焊接机器人采用喷嘴传感,传感电压为DC42V左右。
(总体线路图如图一所示)
图一
喷嘴传感用于焊前对实际焊缝寻踪定位,具体原理为:寻位开始时,喷嘴上电DC42V,喷嘴移动与工件接触后形成回路立即弹回,即寻找到第1点,然后依据同样原理寻找第2、3点等,编程人员可根据工件需要自行设置寻找点数,最终定位工件的实际焊缝。
故障处理:
1、查看焊接程序是否有问题。
调用其它程序测试,都出现寻位报警,所以该故障与
程序无关。
2、查看一下是否有寻位电压。
到达寻位点后,系统会通过寻位线自动给喷嘴供电,
通过到达寻位点后测量喷嘴电压或通过快捷键“CTRL+O”给喷嘴手动上电两种方式测量结果均为无电压。
对于该种情况又可以从以下方面考虑:
(1)寻位线断,电压过不来。
这种情况需要测量寻位线是否有断路处,首先测量从软管束插头到与喷嘴这一段线路,然后测量从RCI控制柜喷嘴传感线路板到与软管束插头相连的插孔间的这段线路,测量结果为寻位线无断路处。
(2)用万用表测量从喷嘴传感板至喷嘴处寻位线无问题,是否可能中间有虚接处。
用一根电源线直接从RCI控制柜接到喷嘴处试验,还是报警,说明从RCI控制柜至喷嘴处的线路无问题。
(如图二所示,2号控制线)
图二
(3)是否喷嘴传感板有问题。
通过替换RCI控制柜的喷嘴传感板测试,故障依旧存在,说明喷嘴传感板无问题。
(如图三所示,左面的线路板)
图三
(4)是否与喷嘴传感板相连的控制、电源线路有问题。
测量接头端子上的各控制线与
电源线均无问题。
(如图四、图五所示)
图四 图五 3、 分析图纸发现喷嘴传感板还与总线耦合器有关联(图纸如图六所示、总线耦合器如图七所示)
图六 图七
1T00-A2模块端子图
寻位开始,喷嘴传感上电后,总线耦合器的1T00-A2模块的OUT2.5端子应该有输出,对应的指示灯亮。
但此次故障OUT2.5端子无输出,所以怀疑总线耦合器的1T00-A2模块有问题,更换该模块后故障排除。
最终发现该故障的原因是RCI 控制柜内与喷嘴传感板有关联的总线耦合器有问题。
解决此类问题要将电气图纸研究透彻,将与该故障有关联的所有点找出来,由简入深,一步步分析、测试、排除,最终会找到故障原因(整体连接方式如下图所示)。
总线耦合器1T00-A2模块喷嘴传感线路板。