ABB机器人常见故障处理
- 格式:doc
- 大小:711.92 KB
- 文档页数:3
ABB故障处理一、故障类型分类1、机械故障1.1 轴承故障1.2 传动系统故障1.3 机械结构故障2、电气故障2.1 电源故障2.2 控制系统故障2.3 电缆连接故障3、编程故障3.1 代码错误3.2 逻辑错误3.3 参数设置错误4、传感器故障4.1 传感器故障4.2 信号处理故障二、故障处理步骤1、问题确认1.1 收集故障现象信息1.2 确定问题出现的频率和条件1.3 检查是否有相关故障报警2、故障排查2.1 机械部分排查2.1.1 检查机械结构是否有异常 2.1.2 检查传动系统是否正常2.1.3 检查轴承是否损坏2.2 电气部分排查2.2.1 检查电源供应是否正常2.2.2 检查控制系统是否工作正常 2.2.3 检查电缆连接是否良好2.3 编程部分排查2.3.1 检查编程代码是否正确2.3.2 检查参数设置是否正确2.4 传感器部分排查2.4.1 检查传感器是否损坏2.4.2 检查传感器信号处理部分是否正常3、故障解决3.1 机械故障解决方法3.2 电气故障解决方法3.3 编程故障解决方法3.4 传感器故障解决方法4、故障预防措施4.1 定期维护保养4.2 及时更换易损件4.3 提升操作人员技能附件:故障处理记录表法律名词及注释:1、机械故障:指在运行过程中出现的机械部分的故障,包括轴承故障、传动系统故障和机械结构故障等。
2、电气故障:指在运行过程中出现的电气部分的故障,包括电源故障、控制系统故障和电缆连接故障等。
3、编程故障:指在运行过程中出现的与编程相关的故障,包括代码错误、逻辑错误和参数设置错误等。
4、传感器故障:指在运行过程中出现的传感器部分的故障,包括传感器故障和信号处理故障等。
abb机械手故障原因解决方法嘿,咱今儿就来聊聊 ABB 机械手那些事儿!这 ABB 机械手啊,有时候就跟个爱闹脾气的小孩似的,会出现各种故障呢。
你说它为啥会出故障呀?那原因可多了去啦!好比说,可能是长时间工作累着啦,就像咱人一样,累过头了就容易出毛病。
或者是它的某个零部件老化了,就像咱家里用久了的电器,时不时就给你来点小插曲。
再或者是操作不当,被错误地使用了,这能不出问题嘛!那遇到故障咋解决呢?别急呀,咱一个一个来。
要是因为长时间工作累着了,那就让它好好休息休息呗,给它放个假,让它喘口气。
要是零部件老化了,那就得像咱去看医生一样,给它来个精准的诊断,该换零件就换零件呀,可不能含糊。
要是操作不当引起的,那可得好好反思反思,是不是得重新培训一下操作人员,让他们知道该怎么正确地和这机械手打交道呀。
你想想,这 ABB 机械手在工厂里那可是大功臣啊,它能帮咱干好多活呢。
要是它突然闹脾气不干活了,那咱不得着急上火呀!所以呀,咱得像爱护自己的宝贝一样爱护它,平时多给它做做保养,定期检查检查,别等出了问题才想起来它。
就好比一辆汽车,你不好好保养它,它能好好给你跑吗?ABB 机械手也是一样的道理呀!咱可不能偷懒,得对它负责任。
而且呀,解决故障的时候可得细心再细心,不能马马虎虎的。
不然,今天修好明天又坏了,那不是白折腾嘛!咱再说说,要是遇到那种特别棘手的故障咋办呢?这时候可不能慌了神呀,得冷静下来,好好分析分析。
可以找专业的技术人员呀,他们可是这方面的行家呢。
或者去网上找找相关的资料,说不定就能找到解决办法啦。
总之呢,对待 ABB 机械手的故障,咱得有耐心,有细心,还要有决心。
不能怕麻烦,不能嫌累。
你说要是因为一点小故障就把它扔一边不管了,那多可惜呀!它可是能给咱创造价值的呀!所以呀,大家都要重视起来 ABB 机械手的故障问题,别不当回事儿。
只有这样,咱才能让它更好地为咱服务,为咱创造更多的财富呀!难道不是吗?。
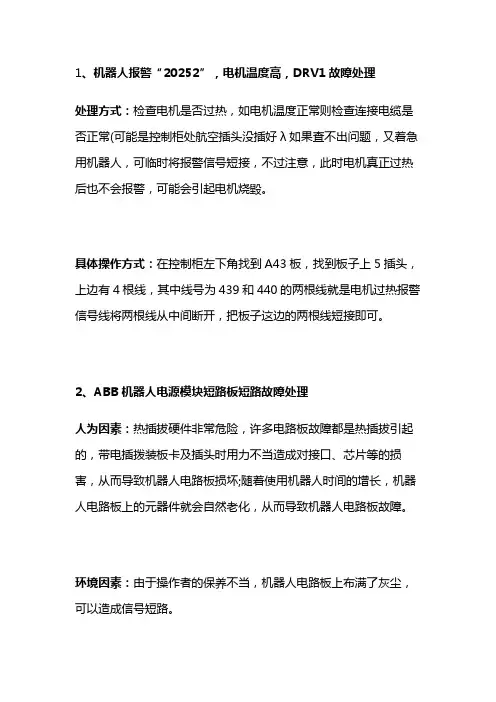
1、机器人报警“20252”,电机温度高,DRV1故障处理处理方式:检查电机是否过热,如电机温度正常则检查连接电缆是否正常(可能是控制柜处航空插头没插好λ如果査不出问题,又着急用机器人,可临时将报警信号短接,不过注意,此时电机真正过热后也不会报警,可能会引起电机烧毀。
具体操作方式:在控制柜左下角找到A43板,找到板子上5插头,上边有4根线,其中线号为439和440的两根线就是电机过热报警信号线将两根线从中间断开,把板子这边的两根线短接即可。
2、ABB机器人电源模块短路板短路故障处理人为因素:热插拔硬件非常危险,许多电路板故障都是热插拔引起的,带电插拨装板卡及插头时用力不当造成对接口、芯片等的损害,从而导致机器人电路板损坏;随着使用机器人时间的增长,机器人电路板上的元器件就会自然老化,从而导致机器人电路板故障。
环境因素:由于操作者的保养不当,机器人电路板上布满了灰尘,可以造成信号短路。
3、什么情况下需要为工业机器人进行备份1.新机器第一次上电后。
2.在做任何修改之前。
3.在完成修改之后。
4.如果工业机器人重要,定期1周一次。
5.最好在U盘也做备份。
6.太旧的备份定期删除,腾出硬盘空间。
4、机器人开机,示教器一直显示加载界面,如何处理上述情况是示教器和机器人主控制器之间没有建立通讯连接,未建立连接的原因包括:1.机器人主机故障。
2.机器人主机内置的cf卡(sd卡)故障。
3.示教器到主机之间的网线松动等。
处理方式:1.检查主机是否正常,检查主机内sd卡是否正常。
2.检查示教器到主机网线是否连接正常。
5、机器人出现报警提示信息10106维修时间提醒是什么意思?这种情况是ABB机器人智能周期保养维护提醒。
6、机器人在开机时进入了系统故障状态如何处理?1.重新启动一次机器人。
2.如果不行,在示教器查看是否有更详细的报警提示,并进行处理。
3.重启。
4.如果还不能解除则尝试B启动。
5.如果还不行,请尝试P启动。
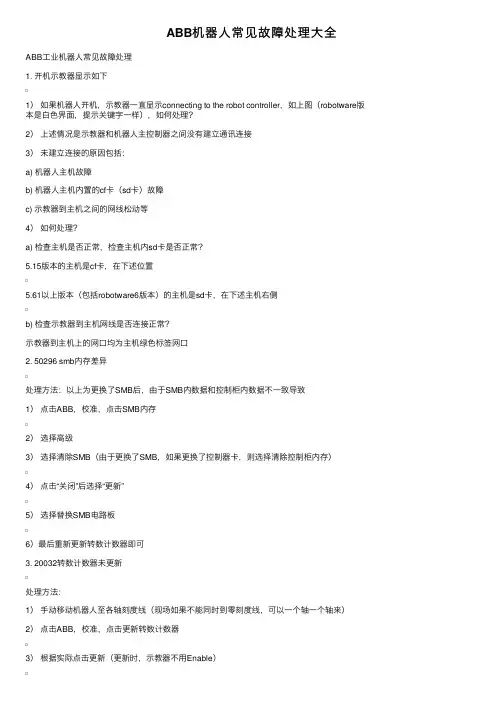
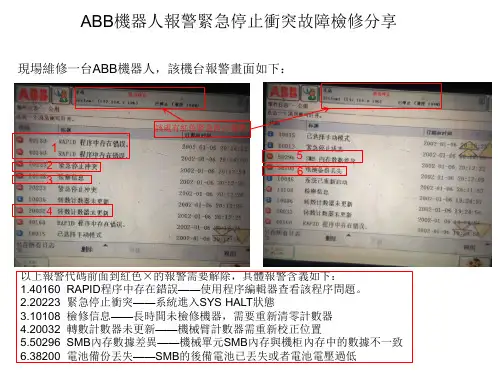
ABB机器⼈常见故障处理⼤全ABB⼯业机器⼈常见故障处理1. 开机⽰教器显⽰如下1)如果机器⼈开机,⽰教器⼀直显⽰connecting to the robot controller,如上图(robotware版本是⽩⾊界⾯,提⽰关键字⼀样),如何处理?2)上述情况是⽰教器和机器⼈主控制器之间没有建⽴通讯连接3)未建⽴连接的原因包括:a) 机器⼈主机故障b) 机器⼈主机内置的cf卡(sd卡)故障c) ⽰教器到主机之间的⽹线松动等4)如何处理?a) 检查主机是否正常,检查主机内sd卡是否正常?5.15版本的主机是cf卡,在下述位置5.61以上版本(包括robotware6版本)的主机是sd卡,在下述主机右侧b) 检查⽰教器到主机⽹线是否连接正常?⽰教器到主机上的⽹⼝均为主机绿⾊标签⽹⼝2. 50296 smb内存差异处理⽅法:以上为更换了SMB后,由于SMB内数据和控制柜内数据不⼀致导致1)点击ABB,校准,点击SMB内存2)选择⾼级3)选择清除SMB(由于更换了SMB,如果更换了控制器卡,则选择清除控制柜内存)4)点击“关闭”后选择“更新”5)选择替换SMB电路板6)最后重新更新转数计数器即可3. 20032转数计数器未更新处理⽅法:1)⼿动移动机器⼈⾄各轴刻度线(现场如果不能同时到零刻度线,可以⼀个轴⼀个轴来)2)点击ABB,校准,点击更新转数计数器3)根据实际点击更新(更新时,⽰教器不⽤Enable)4. 38103 与SMB的通信中断处理⽅法:检查机器⼈控制柜下⽅的x2到机器⼈本体的smb线是否接好5. 50057关节未同步处理⽅法:1)此故障多数由于未正确关机导致。
2)点击重启,选择⾼级,选择B启动,机器⼈将恢复到最近的⽆措状态6. 正确关机⽅式正确关机⽅式不是直接断电,⽽是进⼊ABB,重新启动,选择⾼级,选择关机7. 20252 电机温度⾼处理⽅法:1)本体6个电机温控线为串联,最后接⼊接触器板(柜内左侧的A43)的x5阵脚2)可能某个轴温度过⾼,导致热敏电阻断开,可以打开电机盖板检查3)如果电机不热或者温控线断开,也可暂时短接A43接触器版的x5的1和28. 34316 电机电流错误处理⽅法:上述问题为驱动到对应电机的动⼒线未正确连接,(上图表⽰4轴)可检查驱动对应轴到电机的连线A41为驱动,X11为1轴输出,X12为2轴输出,X13为3轴输出,X14为4轴输出,X15为5轴输出,X16为6轴输出,9. 37001 电机开启接触器错误处理⽅法:1)此项表⽰接触器动作故障。
abb机器人转角路径故障提示处理示与机器人故障信息阅读技巧详解摘要:一、abb机器人转角路径故障概述二、故障提示与处理方法1.故障现象及原因2.故障诊断与判断3.故障处理与解决方案三、机器人故障信息阅读技巧1.故障信息的获取与整理2.故障信息的解读与分析3.故障信息的应用与优化正文:abb机器人转角路径故障是机器人运行过程中常见的问题,它可能导致机器人运行轨迹偏离预期,影响生产效率和产品质量。
为了保证机器人的稳定运行,了解故障提示及处理方法至关重要。
本文将详细介绍abb机器人转角路径故障的故障提示、处理方法以及机器人故障信息的阅读技巧。
一、abb机器人转角路径故障概述abb机器人转角路径故障主要表现为机器人行驶至转角处时,无法顺利完成转向或转向过程中出现抖动、碰撞等现象。
此故障可能由以下几个方面原因导致:1.机器人控制系统故障:控制器指令错误、传感器故障等。
2.机器人机械部件故障:转角关节磨损、传动部件损坏等。
3.机器人行走路径规划问题:路径规划不合理、路径干涉等。
4.外部环境因素:地面的摩擦力、障碍物等。
二、故障提示与处理方法1.故障现象及原因在实际操作过程中,当机器人出现转角路径故障时,系统会发出故障警报,如异常声音、灯光提示等。
通过对故障现象的观察和分析,可以初步判断故障原因。
2.故障诊断与判断(1)检查机器人控制系统:检查控制器指令是否正确,传感器信号是否正常。
(2)检查机械部件:检查转角关节磨损情况,传动部件是否损坏。
(3)检查路径规划:分析路径规划是否合理,是否存在路径干涉。
(4)检查外部环境:清除地面障碍物,调整地面摩擦力等。
3.故障处理与解决方案(1)修复控制系统故障:更换控制器、修复传感器等。
(2)更换机械部件:更换磨损关节、修复传动部件等。
(3)优化路径规划:重新规划路径,避免干涉现象。
(4)改善外部环境:清理地面障碍物,调整地面摩擦力。
三、机器人故障信息阅读技巧1.故障信息的获取与整理在处理机器人故障时,首先要了解故障相关信息,包括故障现象、发生时间、频率等。

23中国设备工程 2020.11 (下)中国设备工程C h i n a P l a n t E n g i n e e r i ng1 机器人技术概述伺服电机安装在机器人主体中。
主机和伺服模块是IRC5控制器的两个关键部分。
主机包括主板和存储设备,主机完成对机器人功能的控制。
驱动模块从主机接收命令以控制伺服电机的操作,然后机器人主体完成各种任务。
所有机器人软件都安装在CF 卡上,包括系统软件和应用程序软件。
系统软件主要由引导系统(引导程序)和Windows 操作系统组成。
Windows 操作系统是用于执行和操作整个机器人系统的平台。
系统启动时,数据将从CF 卡的内存加载到主板的RAM 中。
CF 卡存储器安装在主机背面的左下角。
示教盒和IRC5控制器是ABB 工业机器人控制系统的核心。
学习挂件用于处理与机器人系统的操作有关的许多功能(程序执行,滚动控制和机器人程序的修改)。
示教器本身也是一台完整的计算机,通过集成的电缆和连接器连接到IRC5控制器。
IRC5控制器主要由操作面板,主机,电源模块,整流器模块,I/O 模块和伺服模块组成。
IRC5控制器包含移动和控制机器人的所有必需功能。
2 ABB 工业机器人控制系统功能机器人控制系统的结构主要包括:一是主从控制。
主从控制是机器人技术的重要特征。
例如,弧焊机器人使用主从控制方法进行操作。
我使用两台计算机。
一台计算机是整个机器人系统的管理员,另一台计算机控制所有关节。
地方价值控制;二是集中控制。
集中控制属于原始的机器人控制结构,对计算机有更高的要求。
集中控制可以降低公司的生产成本,但是由于运行效率低和故障率高,这种方法逐渐淘汰了现代工业,而第三种方法是分布式控制。
分布式控制是一种广泛使用的方法,主要使用主控制计算机将整个机器人系统分为两个级别,主要是有效地管理整个主系统。
而且下一级模块具有很多CPU 。
每个板均由处理器控制。
3 机器人技术控制系统软件架构3.1 操作系统要控制机械手系统,操作系统是关键。
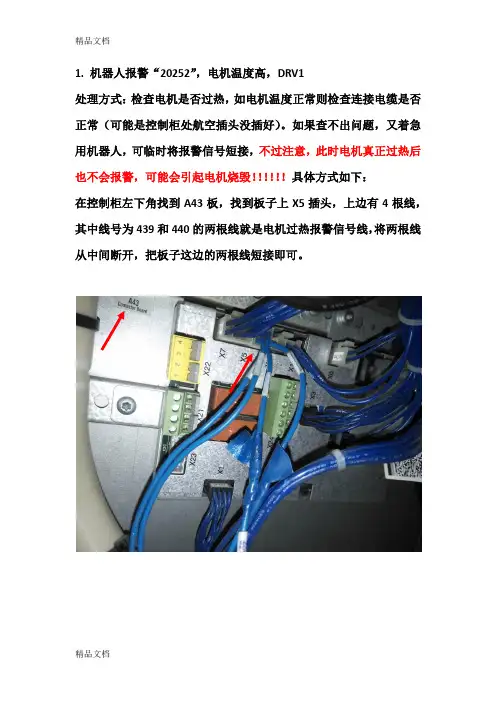
1.机器人报警“20252”,电机温度高,DRV1处理方式:检查电机是否过热,如电机温度正常则检查连接电缆是否正常(可能是控制柜处航空插头没插好)。
如果查不出问题,又着急用机器人,可临时将报警信号短接,不过注意,此时电机真正过热后也不会报警,可能会引起电机烧毁!!!!!!具体方式如下:在控制柜左下角找到A43板,找到板子上X5插头,上边有4根线,其中线号为439和440的两根线就是电机过热报警信号线,将两根线从中间断开,把板子这边的两根线短接即可。
2. 检查工控机主板是否正常的方法:工控机上有3个LED 灯,如下图所示1号灯为电源指示灯,只要电源打到开位此灯就常亮,如此灯不亮则检查工控机电源是否正常。
2号灯为开机程序引导指示灯,开机过程中闪烁,开机完成后灯灭。
开机程序保存在存储卡中,如开机过程中此灯不闪烁,则可能是存储卡故障。
1 2 3存储卡3号灯为主板状态指示灯,开机过程中先是红灯闪烁,后变为绿灯闪烁,最后绿灯常亮,如果此灯最后显示红色或者不亮,则主板有问题,如果按上述过程依次点亮,则证明主板是正常的。
3.如果机器人系统异常或崩溃,可先尝试用“B启动”重新启动,即可恢复到最近的正产状态。
具体方法如下:点击示教器右上角ABB图标,点击重新启动4.机器人I/O状态都丢失,检查控制柜中I/O板,在控制柜柜门的右下角,检查板子上的指示灯是否点亮,如果灯都不亮则检查I/O 板的电源和电源的保险(如下红色箭头所示),如果只是个别I/O 丢失,则查看板子上对应的接线端子,看线是否松动。
5.如果一垛铝锭抓取完了,机器人还继续往下抓,检查轨道末端的光电眼,看其是不是没有对正对侧的反光板,或者是光电眼损坏。
6.如果机器人在自动运行过程中突然不动了,需要查看示教器上显示的程序运行位置,看是否在等待某一I/O信号,然后检查相应的信号源是否正常。
7.如果外部急停按钮都已经解开而机器人一直报紧急停止,则检查控制柜右侧壁右上角的板子(panel board),X1端子的3、4号端子控制机器人的紧急停止,如果3、4号端子之间的连线断开,机器人就报紧急停止。
ABB工业机器人出现的故障及处理方法在什么情况下需要为工业机器人进行备份?1.新机器第一次上电后。
2.在做任何修改之前。
3.在完成修改之后。
4.如果工业机器人重要,定期1周一次。
5.最好在U盘也做备份。
6.太旧的备份定期删除,腾出硬盘空间。
工业机器人出现报警提示信息10106维修时间提醒是什么意思?这个是ABB工业机器人智能周期保养维护提醒工业机器人在开机时进入了系统故障状态应该如何处理?1.重新启动一次工业机器人。
2.如果不行,在示教器查看是否有更详细的报警提示,并进行处理。
3.重启。
4.如果还不能解除则尝试B启动。
5.如果还不行,请尝试P启动。
6.如果还不行请尝试I启动(这将工业机器人回到出厂设置状态,小心)。
工业机器人备份可以多台工业机器人共用吗?不行,比如说工业机器人甲A的备份只能用于工业机器人甲,不能用于工业机器人乙或丙,因为这样会造成系统故障。
对于工业机器人备份中什么文件可以共享?如果两个工业机器人是同一型号,同一配置。
则可以共享RAPID 程序和EIO文件,但共享后也要进行验证方可正常使用。
什么是工业机器人机械原点?机械原点在哪里?工业机器人六个伺服电机都有一个唯一固定的机械原点,错误的设定工业机器人机械原点将会造成工业机器人动作受限或误动作,无法走直线等问题,严重的会损坏工业机器人。
工业机器人50204动作监控报警如何解除?1.修改工业机器人动作监控参数(控制面板—动作监控菜单中)以匹配实际的情况。
2.用AccSet指令降低工业机器人加速度。
3.减小速度数据中的v_rot选项。
工业机器人第一次上电开机报警“50296,SMB内存数据差异”怎么办?1.ABB主菜单中选择校准。
2.点击ROB_1进入校准画面,选择SMB内存。
3.选择“高级”,进入后点击“清除控制柜内存”。
4.完成后点击“关闭”,然后点击“更新”。
5.选择“已交换控制柜或机械手,使用SMB内存数据更新控制柜”。
如何在RAPID程序里自定义工业机器人轨迹运动的速度?1.在示教器主菜单中选择程序数据。
ABB机器人常见问题和解决方法ABB机器人常见问题和解决方法1 开机坐标系无效世界坐标系机器人维修是以***头为基点,在这种坐标系中abb 机器人所有的动作都是按照以***头为顶点来完成移动,XYZ方向切割***方向不改变,如果ABB机器人在世界坐标系中移动,***头也随着改变方向,那就是我们在开机后没有选择工具。
解决方案:配置→当前工具/基坐标→工具号→12 专家登陆一般情况,开机后我们要机器人保养编辑程序时,首先我们要登陆专家级别,有助于我们操作。
解救方案:配置→用户组→专家→登陆→密码ABB→登陆3 设置END新建程序我们发现没有终点,我们要设置终点。
解决方案:配置→杂项→编辑器→定一行DEF4 程序**条设置为home位置编辑程序时,**条指令要设为home位置,这时我们在*后可以直接找到home位置的标准,可以节省手动ABB移动机器人的操作时间。
5 手动关闭输出信号当我们在测试程序或者正常使用时(已经打开了输出信号),有时候会遇到突发情况,比如说程序路径有机器人维修撞车危险,或者预热失败,程序错误等等,这时候我们要手动关闭输出信号。
在问题解决完毕后我们可以再次用kcp打开输出信号。
(其中我们的输出信号是3是低压氧,4是高压氧,5是丙烷)解决方案:显示→输入/输出端→数字输出端→按住驱动→数(关闭或者打开)6 6D鼠标失效系统指示6D鼠标仍然有电压之类的提示,鼠标失效了,我们这时可以松开驱动,从新按下去等待驱动指示 I 变为绿色即可。
7 从电脑中拷贝程序电脑中拷贝程序,以便C盘中程序丢失后,我们可以从D盘或者外部移动U盘中拷贝使用。
解决方案:专家登陆后→按Num(此时显示器上Num为灰色,在按一下转换回来)→CTRL(2)+Esc→电脑C盘→KRC→ROBOTER→KRC →R1→Program8 机器人保养保护当机器人撞车后,会启动自动保护,也就是机器人在A6轴处有一个保护系统,当撞车后弹簧被压弯变形,系统接收到信号后会停止一切操作,此时我们无法操作机器人,这时候我们要先关掉保护开关。
abb中故障代码50031故障代码50031:解析与修复故障代码50031是ABB机器人系统中常见的故障代码之一。
当机器人系统遇到该故障代码时,通常会出现机器人无法正常运行、停止运行或出现异常动作的问题。
本文将详细介绍故障代码50031的原因、解析和修复方法,以帮助用户快速解决这一问题。
一、故障代码50031的原因故障代码50031通常是由以下几个原因引起的:1. 程序错误:机器人系统中的程序错误是造成故障代码50031的常见原因之一。
程序错误可能是由于代码逻辑错误、语法错误或变量赋值错误等引起的。
2. 传感器故障:传感器是机器人系统中的重要组成部分,用于检测和感知周围环境。
如果传感器出现故障或损坏,就会导致机器人系统无法正常运行,并触发故障代码50031。
3. 机械故障:机器人系统中的机械部件如电机、减速器、连杆等,如果出现故障或损坏,也会引发故障代码50031。
4. 电气故障:机器人系统中的电气元件如电源、开关、电缆等,如果出现故障或损坏,同样会导致故障代码50031的出现。
二、解析故障代码50031针对故障代码50031,我们可以采取如下步骤进行解析:1. 检查程序:首先,我们需要仔细检查机器人系统中的程序,查看是否存在代码错误或逻辑错误。
可以使用ABB机器人系统提供的调试工具来帮助定位和解决程序问题。
2. 检查传感器:其次,我们需要检查机器人系统中的传感器是否正常工作。
可以通过查看传感器状态指示灯或使用ABB机器人系统提供的传感器检测工具来检测传感器是否损坏或故障。
3. 检查机械部件:然后,我们需要检查机器人系统中的机械部件是否正常运行。
可以通过观察机械部件的运动状态、听取异常声音或使用机械检测工具来检测机械部件是否出现故障。
4. 检查电气元件:最后,我们需要检查机器人系统中的电气元件是否正常。
可以检查电源是否正常供电、开关是否正常工作、电缆是否损坏等。
三、修复故障代码50031根据故障代码50031的原因,我们可以采取如下方法进行修复:1. 修复程序错误:如果发现程序存在错误,可以通过修改代码逻辑、修正语法错误或重新赋值变量等方式来修复程序错误。
ABB机器人常见故障处理
1:在什么情况下需要为机器人进行备份?
处理方式:1、新机器第一次上电后。
2、在做任何修改之前。
3、在完成修改之后。
4、如果机器人重要,定期1周一次。
5、最好在U盘也做备份。
6、太旧的备份定期删除,腾出硬盘空间。
2:机器人出现报警提示信息10106维修时间提醒是什么意思?
处理方式:这个是ABB机器人智能周期保养维护提醒,需要联系厂家进行机器人保养。
3:机器人在开机时进入了系统故障状态应该如何处理?
处理方式:1、重新启动一次机器人。
2、如果不行,在示教器查看是否有更详细的报警提示,并进行处理。
3、重启。
4、如果还不能解除则尝试B 启动。
5、如果还不行,请尝试P 启动。
6、如果还不行请尝试I 启动(这将机器人回到出厂设置状态,小心)。
4:什么是机器人机械原点?机械原点在哪里?
处理方式:机器人六个伺服电机都有一个唯一固定的机械原点,错误的设定机器人机械原点将会造成机器人动作受限或误动作,无法走直线等问题,严重的会损坏机器人。
5:机器人第一次上电开机报警“50296, SMB 内存数据差异”怎么办?
处理方式:1 ABB主菜单中选择校准。
2 点击ROB_1进入校准画面,选择SMB内存。
3 选择"高级",进入后点击"清除控制柜内存"。
4 完成后点击"关闭",然后点击"更新"。
5 选择"已交换控制柜或机械手,使用SMB内存数据更新控制柜"。
6、机器人报警“20252”,电机温度高,DRV1
处理方式:检查电机是否过热,如电机温度正常则检查连接电缆是否正常(可能是控制柜处航空插头没插好)。
如果查不出问题,又着急用机器人,可临时将报警信号短接,不过注意,此时电机真正过热后也不会报警,可能会引起电机烧毁!
7、如果机器人系统异常或崩溃,可先尝试用“B启动”重新启动,即可恢复到最近的正产状态。
处理方式:点击示教器右上角ABB图标,点击重新启动
8、机器人I/O状态都丢失
处理方式:检查控制柜中I/O板,在控制柜柜门的右下角,检查板子上的指示灯是否点亮,如果灯都不亮则检查I/O板的电源和电源的保险(如下红色箭头所示),如果只是个别I/O 丢失,则查看板子上对应的接线端子,看线是否松动。
9、机器人运行过程中,由于异常停止无法自动运行程序
处理方法:先将机器人打到手动状态,然后在选择“PP TO MAIN”,再重新打至自动状态后程序即可从第一行重新开始执行,然后在设备面板上选择回原位即可。