自动控制原理4
- 格式:ppt
- 大小:914.00 KB
- 文档页数:29

第4章 根 轨 迹 法根轨迹法是分析和设计线性控制系统的图解方法,使用简便,在控制工程上得到了广泛应用。
本章首先介绍根轨迹的基本概念,然后重点介绍根轨迹绘制的基本法则,在此基础上,进一步讨论广义根轨迹的问题,最后介绍控制系统的根轨迹分析方法。
4.1 根轨迹的基本概念4.1.1 根轨迹概念所谓根轨迹,就是系统开环传递函数的某一参数从零变化到无穷时,闭环特征根在s 平面上变化的轨迹。
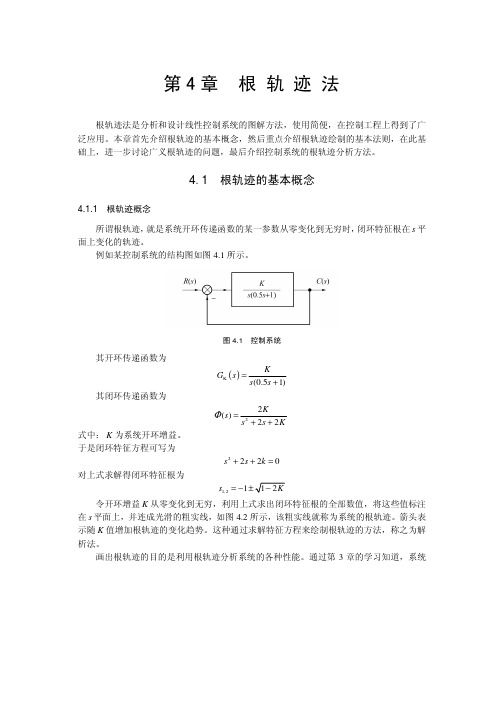
例如某控制系统的结构图如图4.1所示。
图4.1 控制系统其开环传递函数为()K (0.51)KG s s s =+其闭环传递函数为22()22Ks s s KΦ=++式中:K 为系统开环增益。
于是闭环特征方程可写为2220s s k ++=对上式求解得闭环特征根为1,21s =−令开环增益K 从零变化到无穷,利用上式求出闭环特征根的全部数值,将这些值标注在s 平面上,并连成光滑的粗实线,如图4.2所示,该粗实线就称为系统的根轨迹。
箭头表示随K 值增加根轨迹的变化趋势。
这种通过求解特征方程来绘制根轨迹的方法,称之为解析法。
画出根轨迹的目的是利用根轨迹分析系统的各种性能。
通过第3章的学习知道,系统第4章 根轨迹法·101··101·特征根的分布与系统的稳定性、暂态性能密切相关,而根轨迹正是直观反应了特征根在复平面的位置以及变化情况,所以利用根轨迹很容易了解系统的稳定性和暂态性能。
又因为根轨迹上的任何一点都有与之对应的开环增益值,而开环增益与稳态误差成反比,因而通过根轨迹也可以确定出系统的稳态精度。
可以看出,根轨迹与系统性能之间有着比较密切的联系。
图4.2 控制系统根轨迹4.1.2 根轨迹方程对于高阶系统,求解特征方程是很困难的,因此采用解析法绘制根轨迹只适用于较简单的低阶系统。
而高阶系统根轨迹的绘制是根据已知的开环零、极点位置,采用图解的方法来实现的。
下面给出图解法绘制根轨迹的根轨迹方程。

第四章 根轨迹法教学时数:10学时 教学目的与要求:1. 正确理解开环零、极点和闭环零、极点以及主导极点、偶极子等概念。
2. 正确理解和熟记根轨迹方程(模方程及相角方程)。
熟练运用模方程计算根轨迹上任一点的根轨迹增益和开环增益。
3. 正确理解根轨迹法则,法则的证明只需一般了解,熟练运用根轨迹法则按步骤绘制反馈系统K 从零变化到正无穷时的闭环根轨迹。
4. 正确理解闭环零极点分布和阶跃响应的定性关系,初步掌握运用根轨迹分析参数对响应的影响。
能熟练运用主导极点、偶极子等概念,将系统近似为一、二阶系统给出定量估算。
5. 了解绘制广义根轨迹的思路、要点和方法。
教学重点:根轨迹与根轨迹方程、绘制根轨迹的基本法则、广义根轨迹、系统闭环零、极点分布与阶跃响应的关系、系统阶跃响应的根轨迹分析。
教学难点:根轨迹基本法则及其应用。
闭环控制系统的稳定性和性能指标主要有闭环系统极点在复平面的位置决定,因此,分析或设计系统时确定出闭环极点位置是十分有意义的。
根轨迹法根据反馈控制系统的开、闭环传递函数之间的关系,直接由开环传递函数零、极点求出闭环极点(闭环特征根)。
这给系统的分析与设计带来了极大的方便。
§4-1 根轨迹与根轨迹方程一、根轨迹定义:根轨迹是指系统开环传递函数中某个参数(如开环增益K )从零变到无穷时,闭环特征根在s 平面上移动的轨迹。
当闭环系统为正反馈时,对应的轨迹为零度根轨迹;而负反馈系统的轨迹为180︒根轨迹。
例子 如图所示二阶系统,系统的开环传递函数为:()(0.51)K G s s s =+图4-1 二阶系统结构图开环传递函数有两个极点120,2p p ==-。
没有零点,开环增益为K 。
闭环传递函数为:2()2()()22C s K s R s s s K φ==++闭环特征方程为: 2()220D s s s K =++= 闭环特征根为:1211s s =-+=--从特征根的表达式中看出每个特征根都随K 的变化 而变化。

自动控制原理第4版夏德吟课后答案第一章简介1.1自动控制原理是现代控制理论和方法的基础,它是电气自动化、机械自动化、工业过程控制和自动化等专业的重要课程之一。
本书是夏德吟教授编写的自动控制原理课程的第4版,主要针对大学本科生进行授课。
1.2 主要内容本书共分为六个部分,分别是自动控制基础、一阶惯性系统、二阶惯性系统、校正器设计、稳定性分析和设计、多变量系统控制。
1.3 课后答案本书为了帮助学生更好地学习和理解自动控制原理,特别编写了课后习题,并提供了课后答案,供学生参考和自学使用。
下面是第4版自动控制原理的课后答案。
第二章自动控制基础2.1 控制系统基础知识1.什么是控制系统?控制系统是由输入、输出和反馈组成的一种系统,用于控制和调节系统的运行状态,使系统保持在期望的状态。
2.控制系统的基本要素有哪些?控制系统的基本要素有输入、输出、执行器和传感器。
3.什么是开环控制系统?开环控制系统是一种不考虑系统输出与期望输出之间差异的控制系统,只根据输入信号给予执行器驱动,没有反馈环节。
4.什么是闭环控制系统?闭环控制系统是一种根据系统输出与期望输出之间差异进行调节的控制系统,通过传感器获取系统输出,并与期望输出进行比较,然后调节执行器来达到期望输出。
2.2 控制系统的数学建模1.什么是传递函数?传递函数是用来描述线性时不变系统的输入输出关系的函数,通常用G(s)表示,其中s为复变量。
2.什么是系统的零点和极点?系统的零点是传递函数为0的点,系统的极点是传递函数为无穷大的点。
3.什么是单位阶跃响应?单位阶跃响应是指输入信号为单位阶跃函数时系统的输出响应。
4.什么是单位脉冲响应?单位脉冲响应是指输入信号为单位脉冲函数时系统的输出响应。
2.3 时域分析1.什么是系统的稳定性?系统的稳定性是指系统的输出在无穷大时间内是否趋于稳定,即系统的输出是否收敛。
2.什么是系统的阻尼比?系统的阻尼比是描述系统阻尼程度的参数,用ζ表示。
自动控制原理作业4 参考答案1、已知某系统的开环传递函数为试绘制系统开环对数幅频特性和开环对数相频特性图,用对数判据分析闭环稳定性,求出相位裕量和增益裕量。
解:由题目给定的传递函数可知,系统的转折频率依次为0.023,0.053,1.48,1.6,2.27,30.3和50。
低频段渐近线为水平线,高度为24dB。
系统相频特性为ω和φ(ω)对照表如下:开环对数颇率特性如图1所示。
由图可知,在L(ω) > 0的频段内,φ(ω)对–180o线有1次正穿越,而系统开环传递函数有两个位于右半s平面的极点;即p = 2。
正负穿越次数之差为图1故闭环系统稳定。
可算得ωc = 7. 243rad/s,相位裕量γ = 53o,相位穿越频率ωg =32. 3rad/s,增益裕量K g = 13. 5dB。
2、已知某最小相位系统的开环对数幅频特性曲线如题2图所示,试确定系统的开环传递函数,并求出相角稳定裕量,画出对应的对数相频特性,分析闭环系统的稳定性。
题2图解:(1) 由题2图可知,低频段渐近线斜率为 –40dB/dec,表明系统有两个s = 0的极点;并可以确定各转角频率对应的典型环节类型:在ω= 2处,斜率变化20dB/dec,为一阶徽分环节;在ω= 10处,斜率变化 –20dB/dec,为惯性环节;在ω= 0. 1处,L(ω) = 60dB,斜率为 –40dB/dec,据此可得到系统的开环增益K。
因为所以K = 10。
系统的开环传递函数为(2) 求穿越频率和相位裕量:系统的相位裕量为(3) 相频特性为根据不同频率计算相角,可以画出对数相频特性曲线,如图2所示。
图2(4) 开环传递函数无右半s平面极点;在L(ω) > 0的频段内,φ(ω)对–180o线没有穿越;故闭环系统稳定。
3、已知某最小相位系统的开环传递函数为其中ω1 < ω2 < ω3 < ω4, K* = ω4ωc2,ωc为系统开环对数幅频特性的幅值(增益)穿越频率。