自动控制原理_第四章习题集配套答案
- 格式:doc
- 大小:581.00 KB
- 文档页数:10
⼴西⼤学⾃动控制原理习题答案(本科)第4章习题参考答案4-1已知单位反馈系统的开环传递函数为2()(0.21)K G s s s =+试求:⑴使系统增益裕度为10的K 值;⑵使系统相⾓裕度为30?的K 值。
解:系统开环频率特性为2)(+=ωωωKi G (1)求10=m g 的K 值:令180ω为相⾓交越频率,有180arctan 0.245ω=?,5180=ω由10)04.01(|)(|12180180180=+==Ki G g m ωωω可解得K=1。
(2)求30m ?=?的K 值:由定义180()180(902arctan 0.2)30m c c G i ?ωω=?+∠=?+-?-=?=302.0arctan c ω求得系统幅值交越频率c ω=由1)04.01(|)(|2=+=c c c Ki G ωωω85.3)04.01(2=+=c c K ωω注意:涉及相⾓的计算时,可以(1)逐个计算基本环节的相⾓,然后叠加起来。
(2)将频率特性展开为实部和虚部,然后计算相⾓。
计算幅值⼀般将各个基本环节的幅值相乘。
4-2试由幅相频率计算式()90arg tan arg tan arg tan103(5)2G i G i ωωωω∠=-?-+-=确定最⼩相位系统的传递函数。
解:由相频计算式可得出传递函数的形式为(/31)()(1)(101)K s G s s s s +=++由幅频计算式(5)2G i =有2=求得10/3K ω==,所求最⼩相位系统的传递函数为1312(/31)()(1)(101)s G s s s s +=++4-3已知单位反馈系统开环传递函数)2)(5.1)(1()(+++=s s s Ks G 若希望系统闭环极点都具有⼩于-1的实部,试⽤Nyquist 判据确定增益K 的最⼤值。
解:令1u s =+,则“u 平⾯所有极点均处于负平⾯”等价于“s 平⾯所有闭环极点均具有⼩于-1的实部”,并且)1)(5.0()(++=u u u Ku G 可见)(u G 并⽆右半平⾯的开环极点,所以)(u G 的Nyquist 轨线不能包围)0,1(i -点。
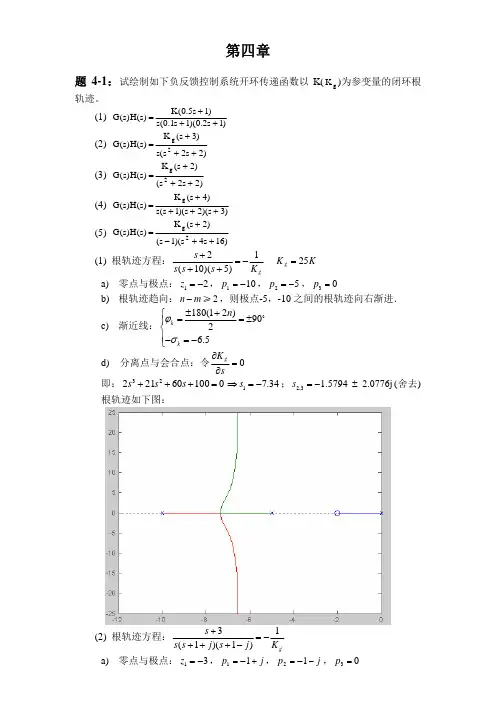
4-2 已知单位负反馈系统的开环传递函数如下,试绘制出相应的闭环根轨迹图。
1)*()(1)(3)K G s s s s =++ 2)*(5)()(2)(3)K s G s s s s +=++解:(1)()(1)(3)*K G s s s s =++① 由G (s )知,n =3,m =0,p 1=0,p 2=–1,p 3=–3。
② 实轴上[0,–1]、[–3,∞]是根轨迹段。
③ 有n –m =3条渐近线,交点3403310-=---=a σ, 夹角︒±=60a ϕ、180°。
④ 实轴上[0、–1]根轨迹段上有分离点d 。
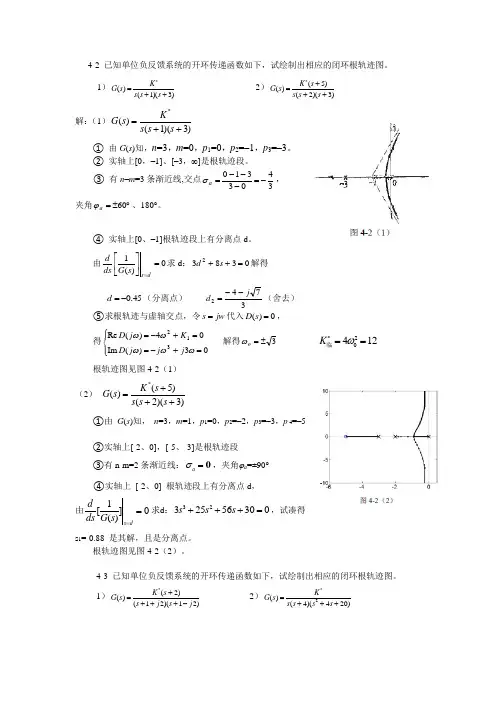
由0)(1=⎥⎦⎤⎢⎣⎡=ds s G ds d 求d :03832=++s d 解得 45.0-=d (分离点) 3742j d --=(舍去) ⑤求根轨迹与虚轴交点,令jw s =代入0)(=s D ,得⎪⎩⎪⎨⎧=+-==+-=03)(Im 04)(Re 312ωωωωωj j j D K j D 解得3±=o ω 20412*K ω==临根轨迹图见图4-2(1)(2) *(5)()(2)(3)K s G s s s s +=++①由 G (s )知, n =3,m =1,p 1=0,p 2=–2,p 3=–3,p 4=–5②实轴上[-2、0],[-5、-3]是根轨迹段 ③有n-m=2条渐近线:0a σ=,夹角ϕa =±90°④实轴上 [-2、0] 根轨迹段上有分离点d , 由1[]0()s dd ds G s ==求d :3232556300s s s +++=,试凑得 s 1=-0.88 是其解,且是分离点。
根轨迹图见图4-2(2)。
4-3 已知单位负反馈系统的开环传递函数如下,试绘制出相应的闭环根轨迹图。
1)*(2)()(12)(12)K s G s s j s j +=+++- 2)*2()(4)(420)K G s s s s s =+++解:(1)*(2)()(12)(12)K s G s s j s j +=+++-根轨迹图见图4-3(1)(2)*2()(4)(420)K G s s s s s =+++① n =4,m =0,p 1=0,p 2=–4,p 3、4=–2±j 4② p 1、p 2连线中点正好是p 3、p 4实部,开环极点分布对称于垂线s=–2,根轨迹也将对称于该垂线。

4-1 绘制具有下列开环传递函数的负反馈系统的根轨迹1、()()()()54*++=s s s K s H s G解:(1)3个开环极点为:p 1=0,p 2=-4,p 3=-5。
(2)实轴上的根轨迹(-4,0),(-∞,-5)(3)303054011-=----=--=∑∑==mn zp n i mj jiσ()() ,,331212ππππϕ±±=+=-+=k mn k a(4) 分离点:1110d 45d d ++=++ d=-1.47, d=-4.53(舍) (5)与虚轴的交点:在交点处,s=j ω,同时也是闭环系统的特征根,必然符合闭环特征方程,于是有:()020********=++--=+++*=*K j j K s s sj s ωωωω整理得: 0203=-ωω;092=-*ωK 解得01=ω;203,2±=ω;18092==*ωK 最后,根据以上数据精确地画出根轨迹。
2、()()()()11.02*++=s s s K s H s G 解:(1)开环极点有3个,分别为:p 1=p 2=-0,p 3=-1,开环零点为z=-0.1 (2)实轴上的根轨迹为:[-1 -0.1] (3) 渐进线有两条,45.0131.010011-=-+--=--=∑∑==mn zp n i mj jiσ()() ,23,2131212ππππϕ±±=-+=-+=k mn k a (4) 分离点:1111d 10.1d d d ++=++ d=0, d=--0.4(舍), d=0.25(舍)分离角:()() ,23,221212ππππϕ±±=+=+=k lk d 最后,精确地画出根轨迹。
4-3 已知系统的开环传递函数为()()()2*1+=s s K s H s G ① 绘制系统的根轨迹图;② 确定实轴上的分离点及K *的值; ③ 确定使系统稳定的K *值范围。
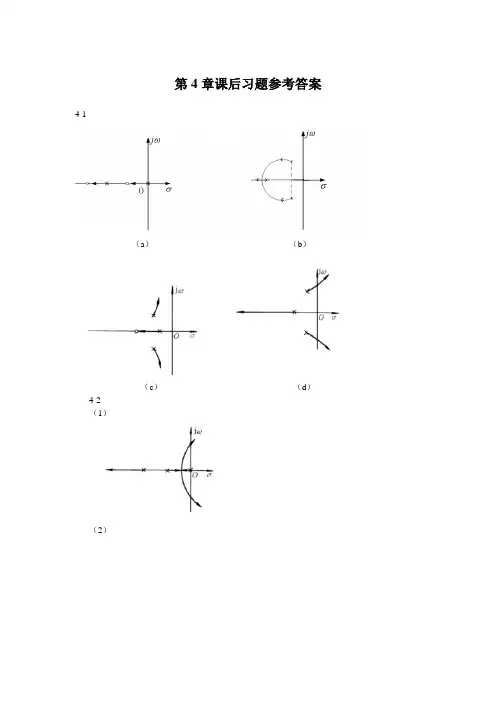
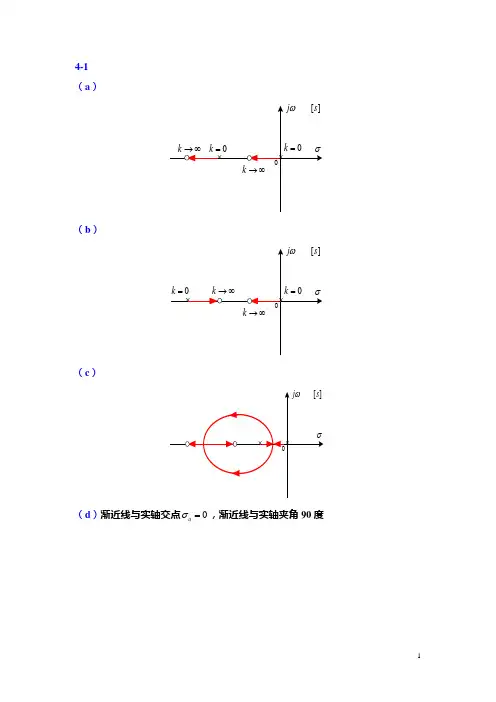
第4章课后习题参考答案4-1(a)(b)(c)(d)4-2(1)(2)4-3(1)(2)(j 24.20 ),K=10.14 4-4 (1)(2)(3)4-5(1)0>K (2)2>K 4-6(1)(2) 闭环极点(j 7.597.0±-),K=34.77 4-7 (1)110222-=+++s s s a(2)130202-=+ss a4-8正反馈 负反馈表明K>0对于正反馈系统不稳定,负反馈系统稳定。
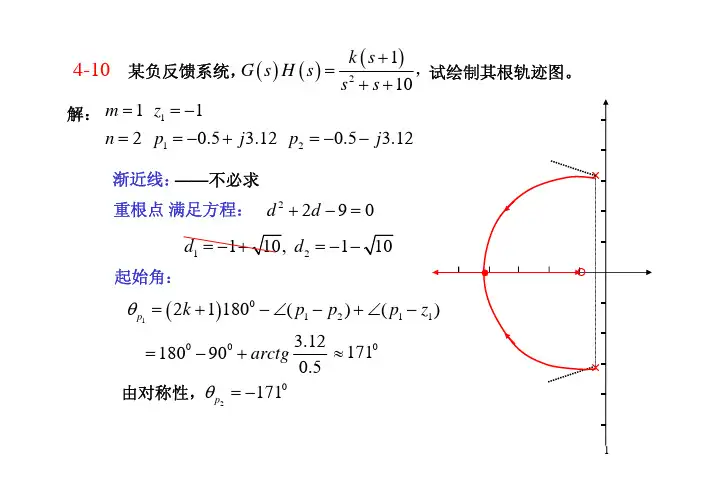
4-90.707ξ=,系统开环传递函数为)4(8)(+=s s s G ,系统的单位阶跃响应为)(t h =)452sin(5.012 +--t e t4-10σωj 007.17-93.2-5-10-(1) K=5;(2)不含有衰减振荡分量的K 值范围为86.00<<K 或29>K 。
4-11 系统的开环极点为0和-p ,开环零点为-z 。
由根轨迹的幅角条件, 得π)12()()(+=+∠-∠-+∠q p s s z s 。
将ωσj s +=代入,整理有pz++︒=-+---σωσωσω111tan 180tan tan取上述方程两端的正切,并利用下列关系yx yx y x tan tan 1tan tan )tan( ±=±有p z z +=++-σωωσσω2)(,则zp z z -=++222)(ωσ,这是一个圆的方程,圆心位于(-z ,j 0)处,而半径等于zp z -2(注意,圆心位于开环传递函数的零点上)。
证毕。
4-12(1)分离点-0.465,对应K=0.88;虚轴的交点j 2± (2)88.00<<K ,阶跃响应不出现超调。
4-13(1)(2)70MAX K =4-14负反馈稳定K 值范围为0<K<73.8,正反馈稳定K 值范围为0<K<35,所以确定根轨迹增益K 的范围为0<K<35。
自动控制原理第二版第四章课后答案【篇一:《自动控制原理》第四章习题答案】4-1 系统的开环传递函数为g(s)h(s)?k*(s?1)(s?2)(s?4) 试证明点s1??1?j3在根轨迹上,并求出相应的根轨迹增益k*和开环增益k。
解若点s1在根轨迹上,则点s1应满足相角条件?g(s)h(s)??(2k?1)?,如图解4-1所示。
对于s1= -1+j3,由相角条件?g(s1)h(s1)?0??(?1?j3?1)??(?1?j3?2)??(?1?j3?4)? 0??2??3??6???满足相角条件,因此s1= -1+j3在根轨迹上。
将s1代入幅值条件: g(s1)h(s1?k*?1?1?j3?1??1?j3?2??1?j3?4k8*解出: k=12 ,k=*?324-2 已知开环零、极点如图4-2 所示,试绘制相应的根轨迹。
解根轨如图解4-2所示:4-3 单位反馈系统的开环传递函数如下,试概略绘出系统根轨迹。
⑴ g(s)?ks(0.2s?1)(0.5s?1)k(s?5)s(s?2)(s?3)* ⑵ g(s)?⑶ g(s)?k(s?1)s(2s?1)解⑴ g(s)?ks(0.2s?1)(0.5s?1)=10ks(s?5)(s?2)系统有三个开环极点:p1?0,p2= -2,p3 = -5①实轴上的根轨迹:???,?5?, ??2,0?0?2?57?????a??33②渐近线: ????(2k?1)????,?a?33?③分离点:1d?1d?5?1d?2?0解之得:d1??0.88,d2?3.7863(舍去)。
④与虚轴的交点:特征方程为 d(s)=s3?7s2?10s?10k?0?re[d(j?)]??7?2?10k?0令 ? 3im[d(j?)]????10??0?解得?????k?7。
根轨迹如图解4-3(a)所j)与虚轴的交点(0,?示。
⑵根轨迹绘制如下:①实轴上的根轨迹:??5,?3?, ??2,0?0?2?3?(?5)????0a??2②渐近线: ????(2k?1)????a?22?③分离点: 1d?1d?2?1d?3?1d?5用试探法可得 d??0.886。
(a)(b)(c)σ=,渐近线与实轴夹角90度(d)渐近线与实轴交点0a1230, 0, 1p p p ===-1. 实轴上的根轨迹(,1) (0,0)-∞-2. 渐近线:3n m -=3条根轨迹趋向无穷远处的渐近线相角为180(21)60,180 (0,1)3a q q ϕ︒+=±=±︒︒= 渐近线与实轴的交点为11001133n mi ii j a p zn mσ==---===--∑∑ 3. 分离点(会合点):系统的特征方程为21+()10(1)KG s s s =+=+即 232=(1)K s s s s -+=--2=320dKs s ds--=(32)0s s +=根 10s =,20.667s =-(舍去)4. 与虚轴的交点:令 s j ω= 代入特征方程 21+()10(1)KG s s s =+=+2(1)=0s s K ++2()(1)=0j j K ωω++2(1)=0j K ωω-++2=0K j ωω--2=00K ωω⎧-⎨=⎩=0ω (舍去)与虚轴没有交点,即只有根轨迹上的起点,也即开环极点 1,20p = 在虚轴上。
4.5 开环传递函数为2()(6)(645)K G s s s s s =+++ 开环极点为123,40, 6, 36p p p j ==-=-±1. 实轴上的根轨迹:(6,0)-2. 渐近线:4n m -=,共有4条渐近线,4条根轨迹趋向无穷远处的渐近线相角180(21)45,135 4a q ϕ︒+=±=±︒±︒ 渐近线与实轴的交点为116363634n mi ii j a p zj jn mσ==---+--===--∑∑3. 分离点(会合点):系统的特征方程为21+()10(6)(645)KG s s s s s =+=+++ 即 2432(6)(645)(1281270)K s s s s s s s s =-+++=-+++=0dKds根 13s =-,2,33s j =- 4. 与虚轴的交点:令 s j ω= 代入特征方程 21+()10(6)(645)KG s s s s s =+=+++4324231281270081012270=0s j j j K K j j ωωωωωωωωω=--++=-+=-+令,得实部: 虚部:解得:=0= 4.74=1316.25K ωω±(舍去),,5. 出射角:出射角公式11,()180(2)()1r nr mj r rp i j i j p z p p k θ==≠=±+∠︒--∠-+∑∑极点23+2s j =-的出射角为 22211,2(63.41180(21)()(0)=16.690)180(21)=90mnp i j i j j k p z p p k θ==≠-︒+︒+=±︒++∠--∠-±︒︒++-︒∑∑Locus of E xample 4-5 in P 72ReI m。

第四章4-1已知单位反馈系统的开环传递函数为()(1)(2)KG s s s s =++ 试绘制该系统在正、负反馈情况下的根轨迹图。
解:(1)负反馈情况令(1)(2)=0s s s ++,解得 3个开环极点1230,1,2p p p ==-=-根轨迹分支数为3,起点分别为(0,0),(1,0),(2,0)j j j -- 终点均为无穷远处。
在实轴上的根轨迹为(][],2,1,0-∞--两段。
由n=3,m=0得轨迹有3条渐近线,它们在实轴上的交点坐标111n mi ji j a p zn mσ==-==--∑∑渐近线与实轴正方向的夹角为2121=3a k k n m ππϕ++=-()(),(k=0,1,2)当k=0,1,2时,计算得a ϕ分别为60°,180°,-60° 确定分离点,由111++=012d d d ++解得120.42, 1.58d d =-=-由于2d 不是根轨迹上的点,故不是分离点,分离点坐标为1d确定根轨迹与虚轴的交点:控制系统特征方程3232=0s s s K +++令=s j ω 代入上式得3232=0j j K ωωω--++ 写出实部和虚部方程233=020K ωωω⎧-⎪⎨-=⎪⎩可求得=006K K ωω⎧⎧=⎪⎨⎨==⎪⎩⎩因此,根轨迹在ω=6K =;另外实轴上的根轨迹分支在0ω=处与虚轴相交。
负反馈系统根轨迹如下图所示(2)正反馈情况令(1)(2)=0s s s ++,解得 3个开环极点1230,1,2p p p ==-=-根轨迹分支数为3,起点分别为(0,0),(1,0),(2,0)j j j -- 终点均为无穷远处。
在实轴上的根轨迹为[](]2,1,0,--+∞两段。
由n=3,m=0得轨迹有3条渐近线,它们在实轴上的交点坐标111n mi ji j a p zn mσ==-==--∑∑渐近线与实轴正方向的夹角为2=3a k πϕ,(k=0,1,2)当k=0,1,2时,计算得a ϕ分别为0°,120°,-120° 确定分离点,由111++=012d d d ++解得120.42, 1.58d d =-=-由于1d 不是根轨迹上的点,故不是分离点,分离点坐标为2d确定根轨迹与虚轴的交点:控制系统特征方程3232-=0s s s K ++将=s j ω 代入上式得3232-=0j j K ωωω--+ 写出实部和虚部方程23-3=020K ωωω⎧-⎪⎨-=⎪⎩可求得=00-6K K ωω⎧⎧=⎪⎨⎨==⎪⎩⎩ 因此,根轨迹在0ω=处与虚轴相交。

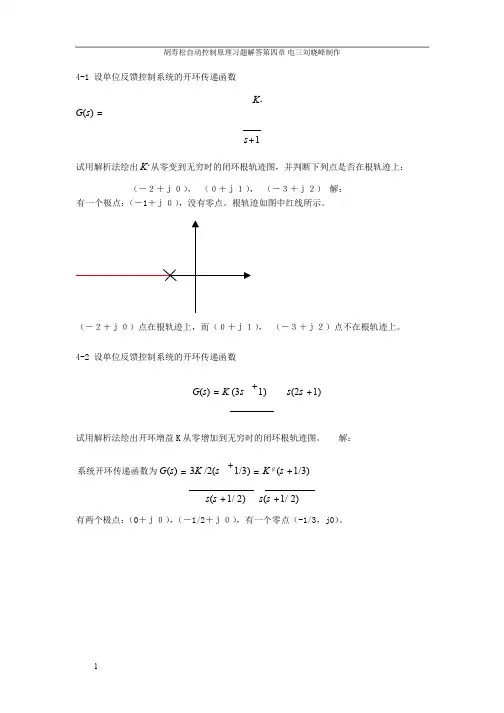
第四章 根轨迹分析法习题4-2 单位回馈控制系统的开环传递函数1)(+=s K s G r,试用解析法绘出r K 从零变化到无穷时的死循环根轨迹图,并判断-2, j1, (-3+j2)是否在根轨迹上。
解:1-s 01s 0r=⇒=+=时,K2-s 02s 1r=⇒=+=时,K3-s 03s 2r=⇒=+=时,K……-2 在根轨迹上,(-3+j2),j1不在根轨迹上。
4-3 回馈控制系统的开环传递函数如下,0≥r K ,试画出各系统的根轨迹图。
(2) )4)(1()5.1()(+++=s s s s K s G r (3) 2)1()(+=s s K s G r ,解:(2)1)开环零、极点:p 1=0,p 2=-1,p 3=-4,z=-1.0,n=3,m=1 2)实轴上根轨迹段:(0,-1),(-1.5,-4) 3)根轨迹的渐近线:︒±=±=-+±=-=----=902)12(,75.12)5.1(410)2( ππϕσm n k aa夹角交点条渐近线4)分离点和会合点6.05.1141111-=+=++++d d d d d 试探法求得(3)1)开环零、极点:p 1=0,p 2,3=-1,n=32)实轴上根轨迹段:(0,-1),(-1,-∞) 3)根轨迹的渐近线:±=-+±=-=--=3)12(,323110)3( ππϕσm n k aa夹角交点条渐近线4)分离点和会合点310121-=⇒=++d d d 5)与虚轴交点:223++s s4-5 系统的开环传递函数为)1()2()(++=s s s K s G r ,(1) 画出系统的根轨迹,标出分离点和会合点;(2) 当增益r K 为何值时,复数特征根的实部为-2?求出此根。
解: (1)1)开环零、极点:p 1=0,p 22)实轴上根轨迹段:(0,-13)分离点和会合点.3,586.02111121-=-=⇒+=++d d d d d123s s s s r2K -r21 1K rKj,202rr±==⇒=-s K K(2)系统特征方程为02)1(rr2=+++K s K s2j 2322122,1rr±-==-=+-=-s K Ka b ,,得:由4-6 单位回馈系统的前向信道函数为)3)(1()(++=s s s K s G r,为使死循环主导极点具有阻尼比5.0=ξ,试确定r K 的值。
.. .. . . . . 第四章 根轨迹分析法习题
4-2 单位回馈控制系统的开环传递函数1)(sKsGr,试用解析法绘出rK从零变化到无穷时的死循环根轨迹图,并判断-2, j1, (-3+j2)是否在根轨迹上。 解:1-s01s0r时,K
2-s02s1r时,K 3-s03s2r时,K ……
-2 在根轨迹上,(-3+j2),j1不在根轨迹上。 4-3 回馈控制系统的开环传递函数如下,0rK,试画出各系统的根轨迹图。 (2) )4)(1()5.1()(ssssKsGr (3) 2)1()(ssKsGr, 解:(2) 1)开环零、极点:p1=0,p2=-1,p3=-4,z=-1.0,n=3,m=1 2)实轴上根轨迹段:(0,-1),(-1.5,-4) 3)根轨迹的渐近线:
902)12(,75.12)5.1(410)2( mnkaa夹角交点条渐近线
4)分离点和会合点 6.05.1141111ddddd试探法求得 (3) 1)开环零、极点:p1=0,p2,3=-1,n=3 2)实轴上根轨迹段:(0,-1),(-1,-∞) 3)根轨迹的渐近线: .. .. . . . . 180,603)12(,323110)3( mnkaa夹角交点条渐近线
4)分离点和会合点 310121
ddd
5)与虚轴交点:02r23Ksss
4-5 系统的开环传递函数为)1()2()(sssKsGr, (1) 画出系统的根轨迹,标出分离点和会合点; (2) 当增益rK为何值时,复数特征根的实部为-2?求出此根。
解: (1) 1)开环零、极点:p1=0,p2=-1 z=-2,n=2,m=1 2)实轴上根轨迹段:(0,-1),(-2,-∞) 3)分离点和会合点
414.3,586.02111121ddddd
可以证明该根轨迹是一个半径为1.414,原点在-2处的标准圆 (2)系统特征方程为02)1(rr2KsKs 2j2322122,1rrsKKab,,得:由
0123ssss
r2Kr 21 1K
rKj,202rrsKK.. ..
. . . . 4-6 单位回馈系统的前向信道函数为)3)(1()(sssKsGr,为使死循环主导极点具有阻尼比5.0,试确定rK的值。 解: 系统的根轨迹如图: d=-0.45 在根轨迹图上作射线: β=±60º 与根轨迹相交点为s1和s2 设相应两个复数死循环极点分别为:
nnjs866.05.01
nnjs866.05.02 则死循环特征方程式可表示为 0)()())()((2332233321nnnnssssssssssss
034r23Ksss系统特征方程为
比较系数,得: r2332334Ksssnnnn828.125.375.0r3Ksn
4-7 控制系统的开环传递函数为)4)(2()(sssKsGr (1) 绘出该回馈系统的根轨迹图; (2) 求系统具有阻尼振荡响应的rK取值围; (3) 系统稳定的rK最大为多少?并求等幅震荡的频率; (4) 求使主导极点具有阻尼比5.0时的rK值,并求对应该值时, 零极点形式的死循环传递函数。
解:(1) 1)开环零、极点:p1=0,p2=-2,p3=-4,n=3 2)实轴上根轨迹段:(0,-2),(-4,-∞) .. .. . . . . 3)根轨迹的渐近线:
180,603)12(,23420)3( mnkaa夹角交点条渐近线
4)分离点和会合点 )(732.4,845.004121121舍ddddd
分离点对应的08.3155.3155.1845.0rK 5)与虚轴交点:086r23Ksss
(2)系统具有阻尼振荡响应的rK取值围是:4808.3rK (3)系统稳定的48rK,等幅振荡频率为22 (4)同上题方法可求得: 阻尼比5.0时j1.1567.0,67.4,3.82,13ssKr
)15.1j67.0)(15.1j67.0)(67.4(3.8)(ssss
4-8单位负反馈系统的开环传递函数为)15.0)(1()(sssKsGr,用根轨迹分析系统的稳定性。 解:1)开环零、极点:p1=0,p2=-1,p3=-2,n=3 2)实轴上根轨迹段:(0,-1),(-2,-∞) 3)根轨迹的渐近线:
0123ssss
r84Kr 68 1K
rK2j2,48084rrsK
K.. ..
. . . . 180,603)12(,13210)3( mnkaa夹角交点条渐近线
4)分离点和会合点 )(644.1,356.002111121舍ddddd
5)与虚轴交点:0223r23Ksss
所以,系统稳定的rK取值围是:30rK
4-9 单位负反馈系统的开环传递函数为)02.01)(01.01()(sssKsGr (1) 画出系统的根轨迹图; (2) 确定系统临界稳定时的开环增益; (3) 确定与临界阻尼比相应的开环增益。
解:(1))50)(100(5000)(sssKsGr
① 实轴上的根轨迹:[0, -50],[-100,-]
0123ssss
r26Kr2 32 1K
r2Kj,30262,1rrsKK.. ..
. . . . ② 分离点:0100d150d1d1
求解得87.78d13.21d21, ③ 渐近线:ooaa1806050,, 根轨迹如图所示。 (2) 系统临界稳定时 150750000*rKK,
(3) 系统临界阻尼比时 62.95.48112*rKK,
4-10 系统的开环传递函数为32)2()(2sssKsGr,试绘制系统在rK0时的根轨迹,并确定系统临界阻尼时的rK值。 解:
1)开环零、极点:2,2j12,1zp,n=2,m=1
2)实轴上根轨迹段:(-2,-∞) 3)分离点和会合点
1)( ,22)(2)( ,32)(2sBssAssBsssA .. .. . . . . )()()()(sAsBsBsA
)22)(2(322ssss s1=-3.732,s2=-0.268(舍)
此时系统即为临界阻尼情况, 对应的46.5732.1732.22732.2222rK
4)出射角7.1447.5490180 4-12 系统结构如图所示,试画出回馈系数k为变数的根轨迹。
解:)110(10)(KsssG 0)110(101)(1KsssG由 01010s2sKs 则,系统等效开环传递函数1010)(2sskssG
1)分离点和会合点 1)( ,12)()( ,10)(2sBssAssBsssA
)()()()(sAsBsBsA )12(102ssss s1=-3.16,s2=3.16(舍)
2)与虚轴无交点:010)110(2sks
3)1.9)1.99(90180
4-14 系统结构如图所示,闭环根轨迹通过(-0.65+j1.07)点,试绘制rK从0变化时系统的根轨迹。
-k110ss
1-)(sR
)(sC .. ..
. . . . 解:)2)(1()1(10)(1ssssTKsG
系统特征方程为:0)1(10)2)(1(1sTKsss 将s=-0.65+j1.07代入上式,可得:667.0,266.01TK
)2)(1()5.1(67.6)(ssssKsG)2)(1()5.1(sss
sK
r
1)根轨迹的渐近线:
902)12(,75.025.1210)2( mnkaa夹角交点条渐近线
2)分离点和会合点 54.05.1121111ddddd试探法求得: 5)与虚轴交点:0.5123rr23KsKss)(
所以,与虚轴无交点。 4-16 单位回馈系统的闭环特征方程为04)1(223rrKsKss。试绘制系统的根轨迹,并求闭环出现重根时的rK值和对应的闭环根。 解: 由系统特征方程可得系统等效开环传递函数2)1()4()(sssKsGr
0123ssss
r.516Krr1.5 32 1K
K
r2K