《自动控制原理》-卢京潮主编-西北工业大学(清华大学)-第四章习题及答案
- 格式:pdf
- 大小:324.36 KB
- 文档页数:22
第4章课后习题参考答案4-1(a)(b)(c)(d)4-2(1)(2)4-3(1)(2)(j 24.20 ),K=10.14 4-4 (1)(2)(3)4-5(1)0>K (2)2>K 4-6(1)(2) 闭环极点(j 7.597.0±-),K=34.77 4-7 (1)110222-=+++s s s a(2)130202-=+ss a4-8正反馈 负反馈表明K>0对于正反馈系统不稳定,负反馈系统稳定。
4-90.707ξ=,系统开环传递函数为)4(8)(+=s s s G ,系统的单位阶跃响应为)(t h =)452sin(5.012 +--t e t4-10σωj 007.17-93.2-5-10-(1) K=5;(2)不含有衰减振荡分量的K 值范围为86.00<<K 或29>K 。
4-11 系统的开环极点为0和-p ,开环零点为-z 。
由根轨迹的幅角条件, 得π)12()()(+=+∠-∠-+∠q p s s z s 。
将ωσj s +=代入,整理有pz++︒=-+---σωσωσω111tan 180tan tan取上述方程两端的正切,并利用下列关系yx yx y x tan tan 1tan tan )tan( ±=±有p z z +=++-σωωσσω2)(,则zp z z -=++222)(ωσ,这是一个圆的方程,圆心位于(-z ,j 0)处,而半径等于zp z -2(注意,圆心位于开环传递函数的零点上)。
证毕。
4-12(1)分离点-0.465,对应K=0.88;虚轴的交点j 2± (2)88.00<<K ,阶跃响应不出现超调。
4-13(1)(2)70MAX K =4-14负反馈稳定K 值范围为0<K<73.8,正反馈稳定K 值范围为0<K<35,所以确定根轨迹增益K 的范围为0<K<35。
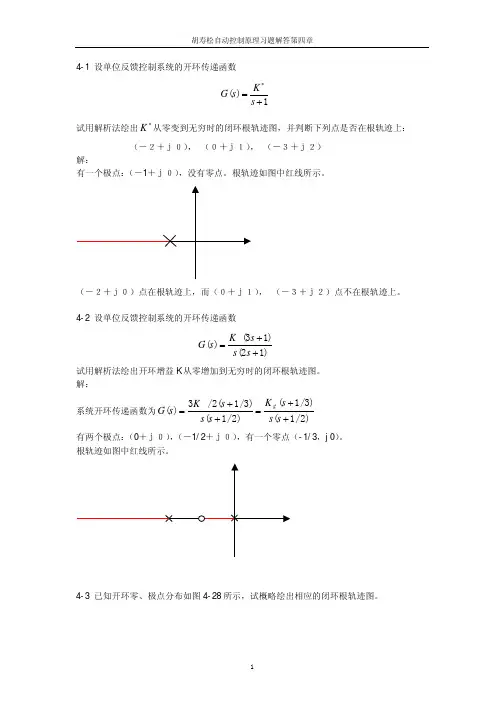
4-1 设单位反馈控制系统的开环传递函数 1)(+=∗s K s G试用解析法绘出∗K 从零变到无穷时的闭环根轨迹图,并判断下列点是否在根轨迹上: (-2+j0), (0+j1), (-3+j2) 解:有一个极点:(-1+j0),没有零点。
根轨迹如图中红线所示。
(-2+j0)点在根轨迹上,而(0+j1), (-3+j2)点不在根轨迹上。
4-2 设单位反馈控制系统的开环传递函数 )12()13()(++=s s s K s G 试用解析法绘出开环增益K 从零增加到无穷时的闭环根轨迹图。
解:系统开环传递函数为)2/1()3/1()2/1()3/1(2/3)(++=++=s s s K s s s K s g G 有两个极点:(0+j0),(-1/2+j0),有一个零点(-1/3,j0)。
根轨迹如图中红线所示。
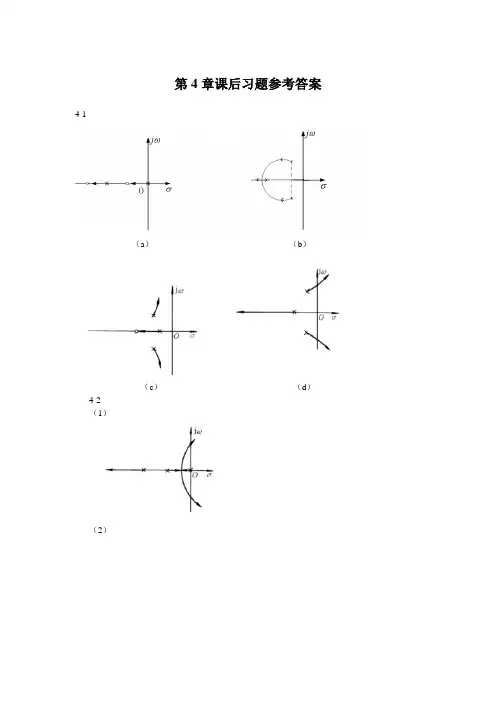
4-3 已知开环零、极点分布如图4-28所示,试概略绘出相应的闭环根轨迹图。
图4-28 开环零、极点分布图4-4 设单位反馈控制系统开环传递函数如下,试概略绘出相应的闭环根轨迹图(要求确定分离点坐标d): (1) )15.0)(12.0()(++=s s s Ks G解:系统开环传递函数为)2)(5()2)(5(10)(++=++=s s s K s s s Ks g G 有三个极点:(0+j0),(-2+j0),(-5+j0)没有零点。
分离点坐标计算如下:051211=++++d d d 3解方程的010142=++d d 7863.31−=d ,d 88.02−=取分离点为88.0−=d根轨迹如图中红线所示。
(2) )12()1()(++=s s s K s G解:系统开环传递函数为)5.0()1()5.0()1(2/)(++=++=s s s K s s s K s g G有两个极点:(0+j0),(-0.5+j0),有一个零点(-1+j0)。
分离点坐标计算如下:115.011+=++d d d 解方程的05.022=++d d 7.11−=d ,d 29.02−=取分离点为7.11−=d ,29.02−=d 根轨迹如图中红线所示。

《自动控制原理》习题解答(教学参考用书)自动控制原理教学组西北工业大学自动化学院2009年7月前言这本《自动控制原理习题解答》与西北工业大学自动化学院自动控制原理教学组编写(卢京潮主编)、西北工业大学出版社出版的国家教委“十一五”规划教材《自动控制原理》配套使用。
供任课教师在备课和批改作业时参考。
新的“十一五”规划教材是在原《自动控制原理》教材基础上经修改完成的,新教材基本保留了原教材的体系结构,主要在具体内容上作了进一步的完善和充实,习题也做了相应调整。
这本习题解答的内容主要由负责各章编写任务的老师提供。
为方便教学,在习题解答之后编入了课程进程表和教学大纲(96学时),供任课教师参考查阅。
对教材或习题解答中发现的错误和不妥之处,恳请各位读者及时记录,并转告编者,以便尽快纠正。
谢谢!。
联系人:卢京潮电 话:88431302 (办公室)135******** (手机)Email: lujc0129@编者2009.5目录一.习题解答 (1)第1章习题及解答 (1)第2章习题及解答 (10)第3章习题及解答 (32)第4章习题及解答 (64)第5章习题及解答 (86)第6章习题及解答 (133)第7章习题及解答 (157)第8章习题及解答 (181)二.课程进程表 (208)三.自动控制原理教学大纲 ( 96时) (210)一、 习 题 及 解 答第1章习题及解答1-1 根据图1-15所示的电动机速度控制系统工作原理图,完成:(1) 将a ,b 与c ,d 用线连接成负反馈状态;(2) 画出系统方框图。
解 (1)负反馈连接方式为:,d a ↔c b ↔;(2)系统方框图如图解1-1 所示。
1-2 图1-16是仓库大门自动控制系统原理示意图。
试说明系统自动控制大门开、闭的工作原理,并画出系统方框图。
图1-16 仓库大门自动开闭控制系统解 当合上开门开关时,电桥会测量出开门位置与大门实际位置间对应的偏差电压,偏差电压经放大器放大后,驱动伺服电动机带动绞盘转动,将大门向上提起。
第五章 线性系统的频域分析与校正习题与解答5-1 试求题5-75图(a)、(b)网络的频率特性。
(a) (b)图5-75 R-C 网络解 (a)依图:⎪⎪⎪⎩⎪⎪⎪⎨⎧+==+=++=++=2121111212111111221)1(11)()(R R C R R T C R RR R K s T s K sC R sC R R R s U s U r c ττ (b)依图:⎩⎨⎧+==++=+++=C R R T CR s T s sCR R sC R s U s U r c)(1111)()(2122222212ττ 5-2 某系统结构图如题5-76图所示,试根据频率特性的物理意义,求下列输入信号作用时,系统的稳态输出)(t c s 和稳态误差)(t e s(1) t t r 2sin )(=(2) )452cos(2)30sin()(︒--︒+=t t t r 解 系统闭环传递函数为: 21)(+=Φs s 图5-76 系统结构图 频率特性: 2244221)(ωωωωω+-++=+=Φj j j 幅频特性: 241)(ωω+=Φj相频特性: )2arctan()(ωωϕ-=系统误差传递函数: ,21)(11)(++=+=Φs s s G s e 则 )2arctan(arctan )(,41)(22ωωωϕωωω-=++=Φj j e e(1)当t t r 2sin )(=时, 2=ω,r m =1 则 ,35.081)(2==Φ=ωωj ο45)22arctan()2(-=-=j ϕ(2) 当 )452cos(2)30sin()(︒--︒+=t t t r 时: ⎩⎨⎧====2,21,12211m m r r ωω5-3 若系统单位阶跃响应 试求系统频率特性。
解 ss R s s s s s ss C 1)(,)9)(4(3698.048.11)(=++=+++-= 则 )9)(4(36)()()(++=Φ=s s s s R s C 频率特性为 )9)(4(36)(++=Φωωωj j j5-4 绘制下列传递函数的幅相曲线:解 ()()()12G j K j K e j ==-+ωωπ幅频特性如图解5-4(a)。
自动控制原理卢京潮主编课后习题答案西北工业大学出版社SANY标准化小组 #QS8QHH-HHGX8Q8-GNHHJ8-HHMHGN#第五章 线性系统的频域分析与校正习题与解答5-1 试求题5-75图(a)、(b)网络的频率特性。
(a) (b)图5-75 R-C 网络解 (a)依图:⎪⎪⎪⎩⎪⎪⎪⎨⎧+==+=++=++=2121111212111111221)1(11)()(R R C R R T C R RR R K s T s K sC R sC R R R s U s U r c ττ (b)依图:⎩⎨⎧+==++=+++=C R R T CR s T s sCR R sC R s U s U r c)(1111)()(2122222212ττ 5-2 某系统结构图如题5-76图所示,试根据频率特性的物理意义,求下列输入信号作用时,系统的稳态输出)(t c s 和稳态误差)(t e s(1) t t r 2sin )(=(2) )452cos(2)30sin()(︒--︒+=t t t r 解 系统闭环传递函数为: 21)(+=Φs s 图5-76 系统结构图 频率特性: 2244221)(ωωωωω+-++=+=Φj j j 幅频特性: 241)(ωω+=Φj相频特性: )2arctan()(ωωϕ-=系统误差传递函数: ,21)(11)(++=+=Φs s s G s e 则 )2arctan(arctan )(,41)(22ωωωϕωωω-=++=Φj j e e(1)当t t r 2sin )(=时, 2=ω,r m =1则 ,35.081)(2==Φ=ωωj 45)22arctan()2(-=-=j ϕ (2) 当 )452cos(2)30sin()(︒--︒+=t t t r 时: ⎩⎨⎧====2,21,12211m m r r ωω5-3 若系统单位阶跃响应 试求系统频率特性。
第一章习题答案1.自动控制:就是在人不直接参与的情况下,依靠外加装置或设备(称为控制装置或控制器),使机械、设备或生产过程(称为被控对象)的某个工作状态或参数(称为被控量)自动地按照预定的规律运行,或使某个被控制的参数按预定要求变化。
给定量:它是人们期望系统输出按照这种输入的要求而变化的控制量。
故一般又称给定输入或简称输入。
上例中的调节器的给定值u g 即是给定输入。
扰动量:它是一种人们所不希望的﹑影响系统输出使之偏离了给定作用的控制量。
上例中给水压力变化或蒸汽负荷变化都属于扰动。
开环控制:指控制装置与被控对象之间只有顺向作用而没有反向联系的控制过程,按这种方式组成的系统称为开环控制系统,其特点是系统的输出量不会对系统的输入量产生影响。
闭环控制:按照偏差进行控制的,其特点是不论什么原因使被控量偏离期望而出现偏差时,必定会产生一个相应的控制作用去减小或消除这个偏差,使被控量与期望值趋于一致。
复合控制:将闭环控制系统和开环控制系统结合在一起构成的开环-闭环相结合的控制系统,称为复合控制恒值控制:给定量是一定的,控制任务是保持被控量为一不变常数,在发生扰动时尽快地使被控量恢复为给定值。
随动控制:给定量是按照事先不知道的时间函数变化的,要求输出跟随给定量变化。
2.7. 自动控制系统的性能的要求:稳定性、快速性、准确性。
自动控制系统的性能的最基本要求:稳定性 第二章习题答案1. (a) 22()()1()()d y t f dy t k y t t dt m dt m m++=F (b )1211212()()()()k k k dy t y t t dt f k k k k +=++F (c )42422()2()()dy t k dy t kt dt m dt m+=F2. (a) 22211221122122112()d u du dvR C R C R C R C R C u R C v dt dt dt ++++=+(b )233112*********()d u duR C R C R C R C R C u dt dt++++2112211222()d v dvR C R C R C R C v dt dt=+++(c )222220.25 1.5d u du dv u v dt dt dt++=+ 3. (a)2111212()(1)()c r U s R R C s U s R R CR R s+=++ (b )222222()21()31c r U s C R s RCs U s C R s RCs ++=++ (c )2211212()()()c r U s R U s R LCs L R R C s R R =++++ 4. (a) 21212121221212212121()1()()()1f f f fs s k k k k Y s f f f f f X s s s k k k k k +++=++++ (b )21212112221212112212()()1()()1c r U s R R C C s R C R C s U s R R C C s R C R C R C s +++=++++ 5. 0.085d d i u ∆= 6. r d h Sh Q dt ∆+=∆ 7.2232(),()432t t s G s g t e e s s --+==-++ 8. 2()142tty t ee e --=-+9.(a )21()()c r U s RU s R =- (b )112212()(1)(1)()c r U s R C s R C s U s R C s++=- (c )212()()(1)c r U s R U s R R Cs =-+ 10.(1) 012180,3,211k k k π︒==-=-; (2) 略;(3)系统的闭环传递函数22301230123()11()1c M t M r M MQ s k k k k T Q s s s k k k k k k k k k k =+++11.闭环传递函数32()0.7(6)()(0.90.7)(1.180.42)0.68c r Q s s Q s s K s K s +=+++++ 12.闭环传递函数12342363451234712348()()1G G G G C s R s G G G G G G G G G G G G G G G G =+++- 13.传递函数21221)()(T s T s s K K s R s C +++=,2121)1()()(T s T s T s s s N s C ++-+= 14.传递函数333222()1()561c r U s U s R C s R C s RCs =+++。
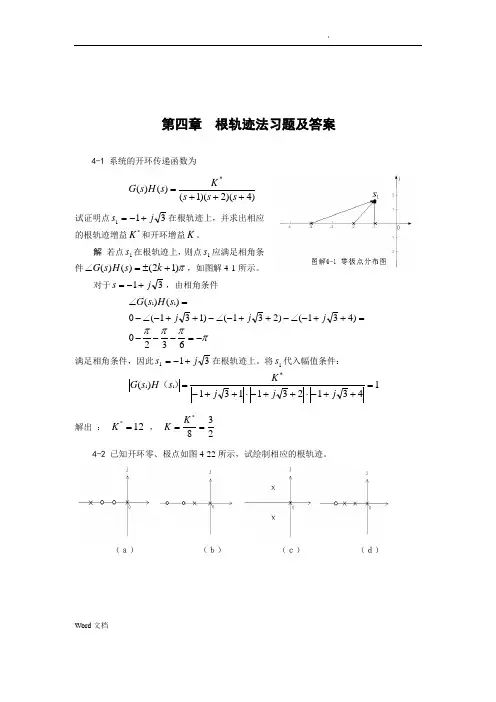
Word文档第四章根轨迹法习题及答案4-1系统的开环传递函数为)4)(2)(1()()(*+++=sssKsHsG试证明点311js+-=在根轨迹上,并求出相应的根轨迹增益*K和开环增益K。
解若点1s在根轨迹上,则点1s应满足相角条件π)12()()(+±=∠ksHsG,如图解4-1所示。
对于31js+-=,由相角条件=∠)()(11sHsG=++-∠-++-∠-++-∠-)431()231()131(0jjjππππ-=---632满足相角条件,因此311js+-=在根轨迹上。
将1s代入幅值条件:1431231131)(*11=++-⋅++-⋅++-=jjjKsHsG)(解出:12*=K,238*==KK4-2已知开环零、极点如图4-22所示,试绘制相应的根轨迹。
(a)(b)(c)(d)Word文档解根轨如图解4-2所示:4-3已知单位反馈系统的开环传递函数,试概略绘出系统根轨迹。
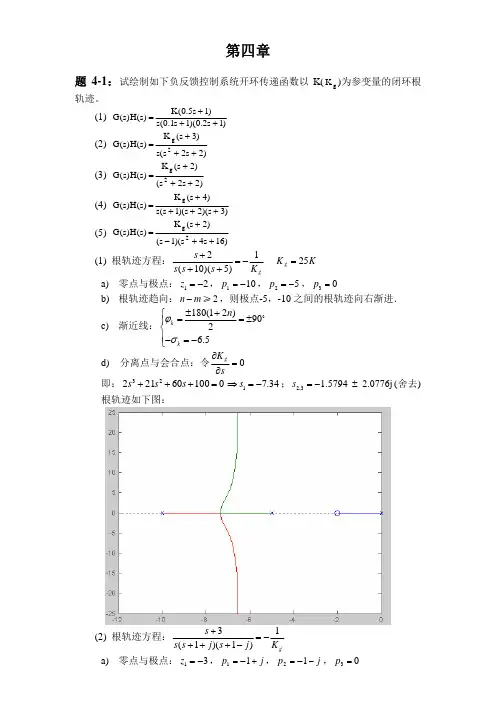
⑴)15.0)(12.0()(++=sssKsG⑵)3)(2()5()(*+++=ssssKsG⑶)12()1()(++=sssKsG(e)(f)(g)(h)题4-22图开环零、极点分布图图解4-2 根轨迹图Word 文档解 ⑴ )2)(5(10)15.0)(12.0()(++=++=s s s Ks s s K s G系统有三个开环极点:01=p ,22-=p ,53-=p ① 实轴上的根轨迹:(]5,-∞-, []0,2-② 渐近线: ⎪⎪⎩⎪⎪⎨⎧±=+=-=--=πππϕσ,33)12(373520k a a③ 分离点:021511=++++d d d 解之得:88.01-=d ,7863.32-d (舍去)。
④ 与虚轴的交点:特征方程为 010107)(23=+++=k s s s s D令 ⎩⎨⎧=+-==+-=010)](Im[0107)](Re[32ωωωωωj D k j D 解得⎩⎨⎧==710k ω与虚轴的交点(0,j 10±)。
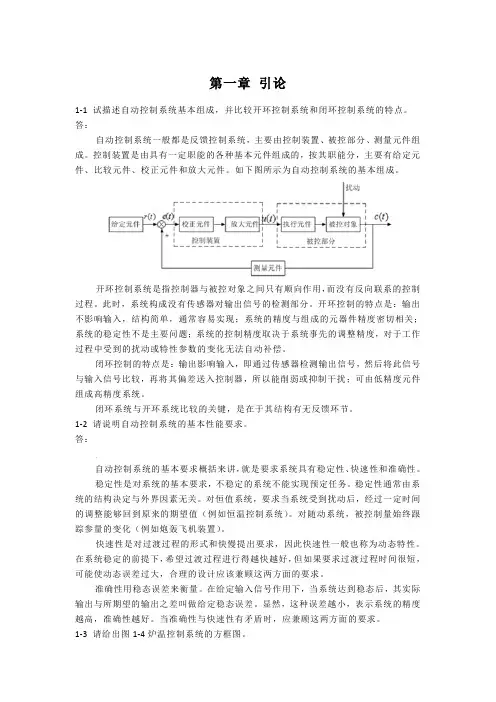
第一章引论1-1 试描述自动控制系统基本组成,并比较开环控制系统和闭环控制系统的特点。
答:自动控制系统一般都是反馈控制系统,主要由控制装置、被控部分、测量元件组成。
控制装置是由具有一定职能的各种基本元件组成的,按其职能分,主要有给定元件、比较元件、校正元件和放大元件。
如下图所示为自动控制系统的基本组成。
开环控制系统是指控制器与被控对象之间只有顺向作用,而没有反向联系的控制过程。
此时,系统构成没有传感器对输出信号的检测部分。
开环控制的特点是:输出不影响输入,结构简单,通常容易实现;系统的精度与组成的元器件精度密切相关;系统的稳定性不是主要问题;系统的控制精度取决于系统事先的调整精度,对于工作过程中受到的扰动或特性参数的变化无法自动补偿。
闭环控制的特点是:输出影响输入,即通过传感器检测输出信号,然后将此信号与输入信号比较,再将其偏差送入控制器,所以能削弱或抑制干扰;可由低精度元件组成高精度系统。
闭环系统与开环系统比较的关键,是在于其结构有无反馈环节。
1-2 请说明自动控制系统的基本性能要求。
答:、自动控制系统的基本要求概括来讲,就是要求系统具有稳定性、快速性和准确性。
稳定性是对系统的基本要求,不稳定的系统不能实现预定任务。
稳定性通常由系统的结构决定与外界因素无关。
对恒值系统,要求当系统受到扰动后,经过一定时间的调整能够回到原来的期望值(例如恒温控制系统)。
对随动系统,被控制量始终跟踪参量的变化(例如炮轰飞机装置)。
快速性是对过渡过程的形式和快慢提出要求,因此快速性一般也称为动态特性。
在系统稳定的前提下,希望过渡过程进行得越快越好,但如果要求过渡过程时间很短,可能使动态误差过大,合理的设计应该兼顾这两方面的要求。
准确性用稳态误差来衡量。
在给定输入信号作用下,当系统达到稳态后,其实际输出与所期望的输出之差叫做给定稳态误差。
显然,这种误差越小,表示系统的精度越高,准确性越好。
当准确性与快速性有矛盾时,应兼顾这两方面的要求。

点),3(j -不在根轨迹上。
(3)求5.0=ξ等超调线与根轨迹的交点方法一 ︒=60β,设等超调线与根轨迹交点A s 坐标实部为σ-,则σσ3,j s B A ±-=,有 162)3)(3(2++=++-+as s j s j s σσσσ 令等式两边s 各次项系数分别相等,得⎩⎨⎧==⇒⎪⎩⎪⎨⎧==4216422a aσσσ 方法二 由特征方程01622=++as s ,按照典型二阶系统近似计算得:⎩⎨⎧==⇒⎪⎩⎪⎨⎧==442162a an n n ωξωω 另外,把n n n n j j s ωωωξξω87.05.012+-=-+-=代入特征方程也可求得同样结果。
2-4-6 已知单位负反馈系统的开环传递函数为)1(4/)()(2++=s s a s s G(1)试绘制参数a 由+∞→0变化的闭环根轨迹图;(2)求出临界阻尼比1=ξ时的闭环传递函数。
【解】:(1)系统特征方程为01)144(04401)1(4)(2232=+++⇒=+++⇒=+++s s s a a s s s s s a s等效开环传递函数为: 22)5.0(25.0)144()(+=++='s s a s s s as Ga 由∞→0变化为一般根轨迹。
① 开环极点5.0,03,21=-=-p p 。
② 渐近线与实轴的交点:31-=-σ,渐近线倾角:︒︒︒=300,180,60θ。
③ 实轴上的根轨迹在区间]0,(-∞。
④ 分离点 由 0)()()()(='-'s Q s P s Q s P 得 025.0232=++s s 解得5.01-=s 为起点,17.0612-=-=s 为分离点。
074.0=a 。
⑤ 根轨迹与虚轴的交点 令ωj s =,代入特征方程得⎩⎨⎧==⇒⎩⎨⎧=+-=+-⇒=++--15.0025.0025.0025.025.02323a a a j j ωωωωωωω⑥ 该系统根轨迹如题2-4-6解图所示。