双向板按弹性理论计算方法简介
- 格式:docx
- 大小:193.96 KB
- 文档页数:56
(一)双向板按弹性理论的计算方法1.单跨双向板的弯矩计算为便于应用,单跨双向板按弹性理论计算,已编制成弯矩系数表,供设计者查用。
在教材的附表中,列出了均布荷载作用下,六种不同支承情况的双向板弯矩系数表。
板的弯矩可按下列公式计算:M = 弯矩系数×(g+p)l x2式中M 为跨中或支座单位板宽内的弯矩(kN·m/m);g、p为板上恒载及活载设计值(kN/m2);l x为板的跨度(m)。
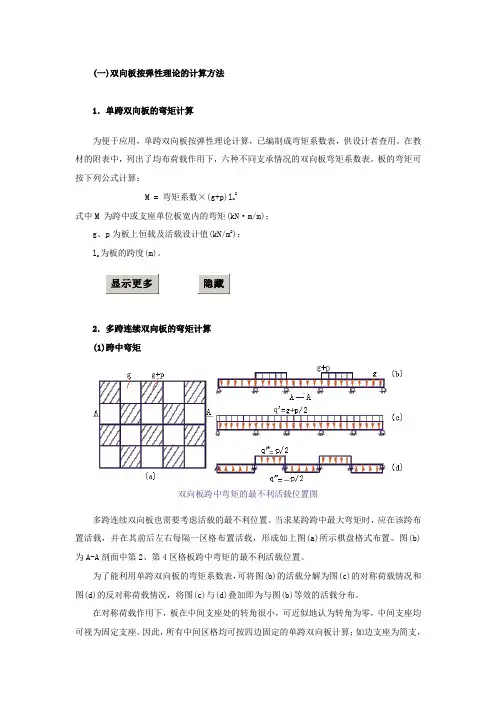
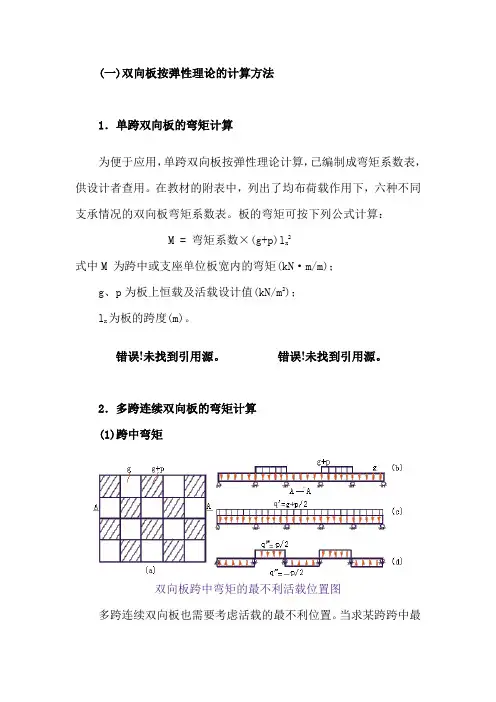
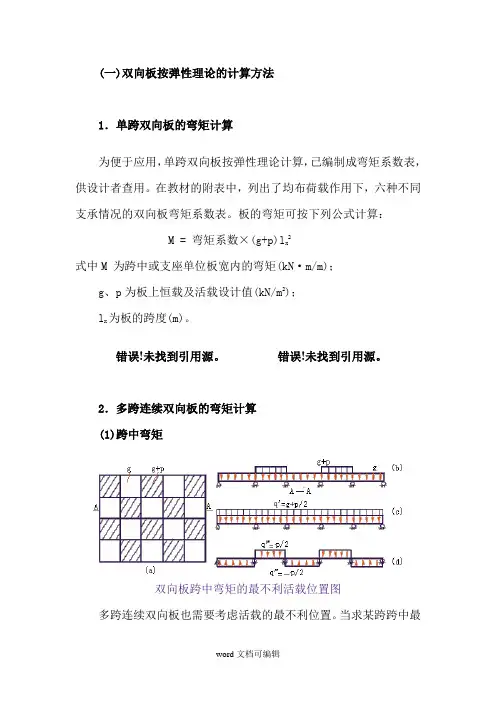
显示更多隐藏2.多跨连续双向板的弯矩计算(1)跨中弯矩双向板跨中弯矩的最不利活载位置图多跨连续双向板也需要考虑活载的最不利位置。
当求某跨跨中最大弯矩时,应在该跨布置活载,并在其前后左右每隔一区格布置活载,形成如上图(a)所示棋盘格式布置。
图(b)为A-A剖面中第2、第4区格板跨中弯矩的最不利活载位置。
为了能利用单跨双向板的弯矩系数表,可将图(b)的活载分解为图(c)的对称荷载情况和图(d)的反对称荷载情况,将图(c)与(d)叠加即为与图(b)等效的活载分布。
在对称荷载作用下,板在中间支座处的转角很小,可近似地认为转角为零,中间支座均可视为固定支座。
因此,所有中间区格均可按四边固定的单跨双向板计算;如边支座为简支,则边区格按三边固定、一边简支的单跨双向板计算;角区格按两邻边固定、两邻边简支的单跨双向板计算。
在反对称荷载作用下,板在中间支座处转角方向一致,大小相等接近于简支板的转角,所有中间支座均可视为简支支座。
因此,每个区格均可按四边简支的单跨双向板计算。
将上述两种荷载作用下求得的弯矩叠加,即为在棋盘式活载不利位置下板的跨中最大弯矩。
(2)支座弯矩支座弯矩的活载不利位置,应在该支座两侧区格内布置活载,然后再隔跨布置,考虑到隔跨活载的影响很小,可假定板上所有区格均满布荷载(g+p)时得出的支座弯矩,即为支座的最大弯矩。
这样,所有中间支座均可视为固定支座,边支座则按实际情况考虑,因此可直接由单跨双向板的弯矩系数表查得弯矩系数,计算支座弯距。

(一)双向板按弹性理论的计算方法1.单跨双向板的弯矩计算为便于应用,单跨双向板按弹性理论计算,已编制成弯矩系数表,供设计者查用。
在教材的附表中,列出了均布荷载作用下,六种不同支承情况的双向板弯矩系数表。
板的弯矩可按下列公式计算:M = 弯矩系数×(g+p)l x2{M=αmp(g+p)l x2 αmp为单向连续板(αmb为连续梁)考虑塑性内力重分布的弯矩系数。
}式中M 为跨中或支座单位板宽内的弯矩(kN·m/m);g、p为板上恒载及活载设计值(kN/m2);l x为板的计算跨度(m)。
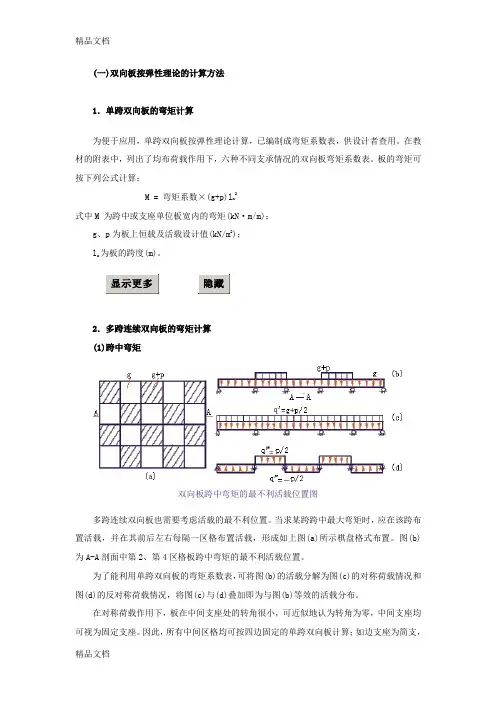
2.多跨连续双向板的弯矩计算(1)跨中弯矩双向板跨中弯矩的最不利活载位置图多跨连续双向板也需要考虑活载的最不利位置。
当求某跨跨中最大弯矩时,应在该跨布置活载,并在其前后左右每隔一区格布置活载,形成如上图(a)所示棋盘格式布置。
图(b)为A-A剖面中第2、第4区格板跨中弯矩的最不利活载位置。
为了能利用单跨双向板的弯矩系数表,可将图(b)的活载分解为图(c)的对称荷载情况和图(d)的反对称荷载情况,将图(c)与(d)叠加即为与图(b)等效的活载分布。
在对称荷载作用下,板在中间支座处的转角很小,可近似地认为转角为零,中间支座均可视为固定支座。
因此,所有中间区格均可按四边固定的单跨双向板计算;如边支座为简支,则边区格按三边固定、一边简支的单跨双向板计算;角区格按两邻边固定、两邻边简支的单跨双向板计算。
在反对称荷载作用下,板在中间支座处转角方向一致,大小相等接近于简支板的转角,所有中间支座均可视为简支支座。
因此,每个区格均可按四边简支的单跨双向板计算。
将上述两种荷载作用下求得的弯矩叠加,即为在棋盘式活载不利位置下板的跨中最大弯矩。
(2)支座弯矩支座弯矩的活载不利位置,应在该支座两侧区格内布置活载,然后再隔跨布置,考虑到隔跨活载的影响很小,可假定板上所有区格均满布荷载(g+p)时得出的支座弯矩,即为支座的最大弯矩。
(一)双向板按弹性理论的计算方法1.单跨双向板的弯矩计算为便于应用,单跨双向板按弹性理论计算,已编制成弯矩系数表,供设计者查用。
在教材的附表中,列出了均布荷载作用下,六种不同支承情况的双向板弯矩系数表。
板的弯矩可按下列公式计算:M = 弯矩系数×(g+p)l x2式中M 为跨中或支座单位板宽内的弯矩(kN·m/m);g、p为板上恒载及活载设计值(kN/m2);l x为板的跨度(m)。
显示更多隐藏2.多跨连续双向板的弯矩计算(1)跨中弯矩双向板跨中弯矩的最不利活载位置图多跨连续双向板也需要考虑活载的最不利位置。
当求某跨跨中最大弯矩时,应在该跨布置活载,并在其前后左右每隔一区格布置活载,形成如上图(a)所示棋盘格式布置。
图(b)为A-A剖面中第2、第4区格板跨中弯矩的最不利活载位置。
为了能利用单跨双向板的弯矩系数表,可将图(b)的活载分解为图(c)的对称荷载情况和图(d)的反对称荷载情况,将图(c)与(d)叠加即为与图(b)等效的活载分布。
在对称荷载作用下,板在中间支座处的转角很小,可近似地认为转角为零,中间支座均可视为固定支座。
因此,所有中间区格均可按四边固定的单跨双向板计算;如边支座为简支,则边区格按三边固定、一边简支的单跨双向板计算;角区格按两邻边固定、两邻边简支的单跨双向板计算。
在反对称荷载作用下,板在中间支座处转角方向一致,大小相等接近于简支板的转角,所有中间支座均可视为简支支座。
因此,每个区格均可按四边简支的单跨双向板计算。
将上述两种荷载作用下求得的弯矩叠加,即为在棋盘式活载不利位置下板的跨中最大弯矩。
(2)支座弯矩支座弯矩的活载不利位置,应在该支座两侧区格内布置活载,然后再隔跨布置,考虑到隔跨活载的影响很小,可假定板上所有区格均满布荷载(g+p)时得出的支座弯矩,即为支座的最大弯矩。
这样,所有中间支座均可视为固定支座,边支座则按实际情况考虑,因此可直接由单跨双向板的弯矩系数表查得弯矩系数,计算支座弯距。
双向板的弹性和塑性计算双向板是一种结构,在受到外力作用时,发生弹性变形和塑性变形。
弹性变形是指材料在外力作用下会发生形变,但在外力去除后能够恢复原状。
塑性变形是指材料在外力作用下会发生形变,并且即使在外力去除后也无法完全恢复原状。
下面将分别介绍双向板的弹性和塑性计算方法。
1.双向板的弹性计算弹性模量是材料的一种力学性质,表示单位面积内的应力与应变之间的关系。
材料的弹性模量一般通过材料试验来确定。
泊松比是材料的另一个力学性质,表示材料在一方向受到压缩时在另一方向的膨胀程度。
泊松比一般也通过材料试验来确定。
双向板的应力-应变关系可以用胡克定律来描述,即应力等于弹性模量乘以应变。
对于双向板,需要考虑两个方向的应变,因此应力等于弹性模量分别乘以两个方向的应变。
根据双向板的几何形状和外力,可以计算出两个方向上的应变。
将两个方向上的应变代入应力-应变关系,可以得到两个方向上的应力。
2.双向板的塑性计算双向板的塑性计算可以通过材料的流变模型来进行。
流变模型是一种描述材料变形行为的数学模型。
常见的流变模型有线性本构模型和非线性本构模型。
线性本构模型是一种简化的模型,假设材料的应力和应变之间存在线性关系。
在受到小应力作用时,线性本构模型可以比较准确地描述材料的变形行为。
通过材料试验或拟合实验数据,可以确定线性本构模型的参数,如线性弹性模量。
非线性本构模型是一种更加复杂的模型,适用于材料受到大应力作用时的变形行为。
常见的非线性本构模型有塑性模型和粘弹模型。
塑性模型是一种将材料的塑性变形考虑进去的模型,可以描述材料受到大应力作用时发生的不可逆形变。
通过材料试验或拟合实验数据,可以确定塑性模型的参数,如屈服应力和流动应力。
双向板的塑性计算需要将应力施加到材料上,并根据材料的流变模型计算出材料的应变和应力。
对于塑性模型,还需要判断材料是否发生塑性变形,以及计算塑性变形的程度。
根据材料的力学性质和几何形状,可以通过数值方法进行塑性计算,如有限元分析方法。
双向板按弹性理论的计算方法双向板是一种常见的结构元件,其受力特点与单向板有所不同。
在计算双向板的设计参数时,可以采用弹性理论中的一些方法来进行计算。
双向板的受力分析主要涉及以下几个方面:弯矩、剪力和扭矩的计算、板的变形以及板的稳定性计算。
首先,我们来看双向板的弯矩计算。
在双向板上,由于受到两个方向的载荷作用,会同时产生正弯矩和负弯矩。
在计算弯矩时,可以采用叠加法。
假设双向板在x和y方向上的弯矩分别为Mx和My,那么总弯矩M为M=Mx+My。
其次,剪力的计算也是双向板设计时需要考虑的问题。
在计算剪力时,可以将双向板看作一个复杂的梁结构,采用横截面法来计算剪力。
与此同时,双向板还会产生扭矩。
扭矩的计算可以借助于剪力的计算结果,具体方法可以参考弹性理论中的扭矩公式。
双向板的变形分为平面变形和空间变形两种情况。
在计算平面变形时,可以采用等效弹性模量法。
通过考虑不同方向上的刚度系数和位移系数,将双向板的变形进行等效处理,从而简化计算过程。
而空间变形的计算则需要考虑额外的因素,例如板的高度、边界条件等。
最后,双向板的稳定性也是需要进行计算的重要参数。
在计算稳定性时,可以引入边界条件、支撑条件等因素,采用弹性理论中的稳定性计算方法进行分析。
总之,双向板按照弹性理论的计算方法主要包括弯矩、剪力和扭矩的计算、板的变形以及板的稳定性计算。
在实际工程中,双向板的设计与计算还需要综合考虑其他因素,例如材料的强度特性、施工工艺、荷载条件等。
因此,在进行双向板的设计与计算时,需要综合运用弹性理论以及其他相关知识,进行全面而准确的分析。
双向板的弹性计算法双向板的弹性计算法双向板的受力特点前已述及。
双向板常用于工业建筑楼盖、公共建筑门厅部分以及横隔墙较多的民用房屋。
当民用房屋横隔墙间距较小时(如住宅),可将板直接支承于四周的砖墙上,以减少楼盖的结构高度。
1.双向板的计算双向板的内力计算有弹性计算法和塑性计算法两种,本书仅介绍双向板内力的弹性计算法。
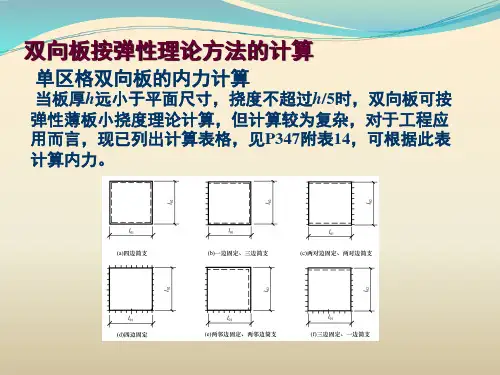
弹性计算法是以弹性薄板理论为依据而进行计算的一种方法,由于这种方法内力分析比较复杂,为简化计算,通常是直接应用根据弹性薄板理论编制的弯矩系数表(附表)进行计算。
(1)单跨双向板的计算单跨双向板按其四边支承情况的不同,在楼盖中常会遇到如下六种情况:四边简支(图1a);一边固定三边简支(图1b);两对边固定、两对边简支(图1c);两邻边固定、两邻边简支(图1d);三边固定、一边简支(图7.1.38e);四边固定(图7.1.38f)。
(a)(b)(c)(d)(e)(f)图1 双向板的六种四边支承情况根据不同支承情况,可从附表中查出弯矩系数,即可求得弯矩:M=表中系数×ql2(1)式中M ——跨中或支座单位板宽内的弯矩;q ——均布荷载(kN /m2)l ——板的较小跨度(m)。
附表中给出了图1所示六种边界条件的单跨板在均布荷载作用下的挠度系数、支座弯矩系数以及泊松比μ =0时的跨中弯矩系数。
钢筋混凝土结构的泊松比μ=1/6,故对跨中弯矩应按下式计算:M x(μ )=M X +μM y(2)M y (μ)=M y+μM X (3)式中M X、M y——按附表查得的板跨中弯矩系数计算得到的跨中弯矩值。
【例1】某砖混结构卫生间的现浇板l1×l2=3600mm×6000mm,四周与圈梁整体现浇,现浇板厚h=90mm,墙体厚240 mm,板承受恒载设计值g=3.6KN/m,活载设计值q=2.8KN/m,采用C20砼,受力钢筋HPB235。
试确定该现浇板受力钢筋用量。
【解】长边与短边之比l2/l1=6000/3600=1.67<2,按双向板计算。
双向板按弹性理论的计算方法](https://uimg.taocdn.com/b424f27de45c3b3567ec8b87.webp)
(一)双向板按弹性理论的计算方法1.单跨双向板的弯矩计算为便于应用,单跨双向板按弹性理论计算,已编制成弯矩系数表,供设计者查用。
在教材的附表中,列出了均布荷载作用下,六种不同支承情况的双向板弯矩系数表。
板的弯矩可按下列公式计算:M = 弯矩系数×(g+p)l x2式中M 为跨中或支座单位板宽内的弯矩(kN·m/m);g、p为板上恒载及活载设计值(kN/m2);l x为板的跨度(m)。
2.多跨连续双向板的弯矩计算(1)跨中弯矩双向板跨中弯矩的最不利活载位置图多跨连续双向板也需要考虑活载的最不利位置。
当求某跨跨中最大弯矩时,应在该跨布置活载,并在其前后左右每隔一区格布置活载,形成如上图(a)所示棋盘格式布置。
图(b)为A-A剖面中第2、第4区格板跨中弯矩的最不利活载位置。
为了能利用单跨双向板的弯矩系数表,可将图(b)的活载分解为图(c)的对称荷载情况和图(d)的反对称荷载情况,将图(c)与(d)叠加即为与图(b)等效的活载分布。
在对称荷载作用下,板在中间支座处的转角很小,可近似地认为转角为零,中间支座均可视为固定支座。
因此,所有中间区格均可按四边固定的单跨双向板计算;如边支座为简支,则边区格按三边固定、一边简支的单跨双向板计算;角区格按两邻边固定、两邻边简支的单跨双向板计算。
在反对称荷载作用下,板在中间支座处转角方向一致,大小相等接近于简支板的转角,所有中间支座均可视为简支支座。
因此,每个区格均可按四边简支的单跨双向板计算。
将上述两种荷载作用下求得的弯矩叠加,即为在棋盘式活载不利位置下板的跨中最大弯矩。
(2)支座弯矩支座弯矩的活载不利位置,应在该支座两侧区格内布置活载,然后再隔跨布置,考虑到隔跨活载的影响很小,可假定板上所有区格均满布荷载(g+p)时得出的支座弯矩,即为支座的最大弯矩。
这样,所有中间支座均可视为固定支座,边支座则按实际情况考虑,因此可直接由单跨双向板的弯矩系数表查得弯矩系数,计算支座弯距。
(一)双向板按弹性理论的计算方法1.单跨双向板的弯矩计算为便于应用,单跨双向板按弹性理论计算,已编制成弯矩系数表,供设计者查用。
在教材的附表中,列出了均布荷载作用下,六种不同支承情况的双向板弯矩系数表。
板的弯矩可按下列公式计算:M = 弯矩系数×(g+p)l x2式中M 为跨中或支座单位板宽内的弯矩(kN·m/m);g、p为板上恒载及活载设计值(kN/m2);l x为板的跨度(m)。
错误!未找到引用源。
错误!未找到引用源。
2.多跨连续双向板的弯矩计算(1)跨中弯矩双向板跨中弯矩的最不利活载位置图多跨连续双向板也需要考虑活载的最不利位置。
当求某跨跨中最大弯矩时,应在该跨布置活载,并在其前后左右每隔一区格布置活载,形成如上图(a)所示棋盘格式布置。
图(b)为A-A剖面中第2、第4区格板跨中弯矩的最不利活载位置。
为了能利用单跨双向板的弯矩系数表,可将图(b)的活载分解为图(c)的对称荷载情况和图(d)的反对称荷载情况,将图(c)与(d)叠加即为与图(b)等效的活载分布。
在对称荷载作用下,板在中间支座处的转角很小,可近似地认为转角为零,中间支座均可视为固定支座。
因此,所有中间区格均可按四边固定的单跨双向板计算;如边支座为简支,则边区格按三边固定、一边简支的单跨双向板计算;角区格按两邻边固定、两邻边简支的单跨双向板计算。
在反对称荷载作用下,板在中间支座处转角方向一致,大小相等接近于简支板的转角,所有中间支座均可视为简支支座。
因此,每个区格均可按四边简支的单跨双向板计算。
将上述两种荷载作用下求得的弯矩叠加,即为在棋盘式活载不利位置下板的跨中最大弯矩。
错误!未找到引用源。
错误!未找到引用源。
(2)支座弯矩支座弯矩的活载不利位置,应在该支座两侧区格内布置活载,然后再隔跨布置,考虑到隔跨活载的影响很小,可假定板上所有区格均满布荷载(g+p)时得出的支座弯矩,即为支座的最大弯矩。
这样,所有中间支座均可视为固定支座,边支座则按实际情况考虑,因此可直接由单跨双向板的弯矩系数表查得弯矩系数,计算支座弯距。
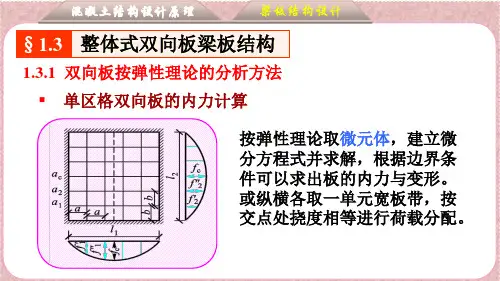
§1.3 整体式双向板梁板结构1.3.1 双向板按弹性理论的分析方法单区格双向板的内力计算按弹性理论取微元体,建立微分方程式并求解,根据边界条件可以求出板的内力与变形。
或纵横各取一单元宽板带,按交点处挠度相等进行荷载分配。
l 0x 和l 0y 中短边和长边计算跨度,按弹性方法计算。
3c 212(1)Eh B µ=−µ为泊桑比,混凝土的µ =0.2,表中系数是按µ =0算得的,当µ 不等于0时,支座弯矩仍查表计算,跨中弯矩要按下式计算:根据边界支承情况,通过查表确定弯矩系数和挠度系数。
单位板宽内弯矩和挠度计算方法(查表法):()()2040c/xx M g q l v g q l B ×+×+弯矩=弯矩系数挠度=挠度系数()x x y()y y x m m m m m m µµµµ++==☼跨中考虑泊桑(松)效应 ☼支座上无泊桑(松)效应▪多区格双向板的内力计算(1) 计算跨中最大弯矩AA AA AA A A 求区格A 时:A 区格活载满布,然后跨区格布置活载。
活载最不利布置方法当求某一区格跨中最大弯矩时,在该区格及其前后左右每隔一区格应布置活荷载,即呈棋盘式布置。
支承条件g+q/2荷载作用下,各中间支座可视为固支。
若A区格为边区格,则边支座有边梁时为固支,无边梁时为简支。
在q/2荷载作用下,中间各支座可视为简支。
若A区格为边区格,则边支座有边梁时为固支,无边梁时为简支。
内力计算a.先求A区格在g+q/2荷载作用下的跨中弯矩,按四边固支条件查单区格板的表格。
b.在求A区格在q/2荷载作用下的跨中弯矩,按四边铰支条件查单区格板的表格。
c.将a 、b计算结果叠加得最后结构。
☼跨中最大挠度也按上述方法计算。
(2) 计算支座最大弯矩活载最不利布置方法为简化计算,假定各区格均布满活载。
支承条件中间支座均为固支,边支座按实际支座情况而定。
(一)双向板按弹性理论的计算方法1.单跨双向板的弯矩计算为便于应用,单跨双向板按弹性理论计算,已编制成弯矩系数表,供设计者查用。
在教材的附表中,列出了均布荷载作用下,六种不同支承情况的双向板弯矩系数表。
板的弯矩可按下列公式计算:M = 弯矩系数×(g+p)l x2式中M 为跨中或支座单位板宽内的弯矩(kN·m/m);g、p为板上恒载及活载设计值(kN/m2);l x为板的跨度(m)。
错误!未找到引用源。
错误!未找到引用源。
2.多跨连续双向板的弯矩计算(1)跨中弯矩双向板跨中弯矩的最不利活载位置图多跨连续双向板也需要考虑活载的最不利位置。
当求某跨跨中最大弯矩时,应在该跨布置活载,并在其前后左右每隔一区格布置活载,形成如上图(a)所示棋盘格式布置。
图(b)为A-A剖面中第2、第4区格板跨中弯矩的最不利活载位置。
为了能利用单跨双向板的弯矩系数表,可将图(b)的活载分解为图(c)的对称荷载情况和图(d)的反对称荷载情况,将图(c)与(d)叠加即为与图(b)等效的活载分布。
在对称荷载作用下,板在中间支座处的转角很小,可近似地认为转角为零,中间支座均可视为固定支座。
因此,所有中间区格均可按四边固定的单跨双向板计算;如边支座为简支,则边区格按三边固定、一边简支的单跨双向板计算;角区格按两邻边固定、两邻边简支的单跨双向板计算。
在反对称荷载作用下,板在中间支座处转角方向一致,大小相等接近于简支板的转角,所有中间支座均可视为简支支座。
因此,每个区格均可按四边简支的单跨双向板计算。
将上述两种荷载作用下求得的弯矩叠加,即为在棋盘式活载不利位置下板的跨中最大弯矩。
错误!未找到引用源。
错误!未找到引用源。
(2)支座弯矩支座弯矩的活载不利位置,应在该支座两侧区格内布置活载,然后再隔跨布置,考虑到隔跨活载的影响很小,可假定板上所有区格均满布荷载(g+p)时得出的支座弯矩,即为支座的最大弯矩。
这样,所有中间支座均可视为固定支座,边支座则按实际情况考虑,因此可直接由单跨双向板的弯矩系数表查得弯矩系数,计算支座弯距。
弹性双向板计算
在进行弹性双向板的计算时,需要使用一些基本的公式和原理。
下面是关于弹性双向板计算的一些基本原理和公式:
1.位移和应变的关系:
ε=(ΔL/L)=(y/r)
其中,ε是单位长度的应变,ΔL是位移,L是板的边长,y是位移距离,r是板的曲率半径。
2.应力和应变的关系:
σ=Eε=Ey/r
其中,σ是单位面积的应力,E是材料的弹性模量。
3.弯曲方程:
弯曲是弹性双向板最主要的变形形式。
根据弯曲理论,弹性双向板的弯曲方程可以表示为:
M=Dη/z
其中,M是弯矩,D是抵抗弯曲的几何刚度系数(弯曲刚度),η是受力方式的常数(取决于荷载类型和边界条件),z是抵抗弯曲的几何形状参数。
4.抵抗弯曲的几何刚度系数:
抵抗弯曲的几何刚度系数D可以通过以下公式计算:
D=(Eh^3/12(1-μ^2))
其中,E是材料的弹性模量,h是板的厚度,μ是材料的泊松比。
5.抵抗弯曲的几何形状参数:
抵抗弯曲的几何形状参数z可以通过以下公式计算:
z=(h^2/6)
其中,h是板的厚度。
以上是弹性双向板计算中的一些基本原理和公式。
需要根据具体的设计条件和要求,结合实际情况选取适合的公式和原理进行计算。
通过应用这些公式和原理,可以对弹性双向板进行合理的设计和计算,以满足结构的强度和稳定性要求。
(一)双向板按弹性理论的计算方法1.单跨双向板的弯矩计算为便于应用,单跨双向板按弹性理论计算,已编制成弯矩系数表,供设计者查用。
在教材的附表中,列出了均布荷载作用下,六种不同支承情况的双向板弯矩系数表。
板的弯矩可按下列公式计算:M=弯矩系数×(g+p)l x2{ M=αm p(g+p)l x2αm p为单向连续板(αm b为连续梁)考虑塑性内力重分布的弯矩系数。
}式中M为跨中或支座单位板宽内的弯矩(k N·m/m);g、p为板上恒载及活载设计值(k N/m2);l x为板的计算跨度(m)。
2.多跨连续双向板的弯矩计算(1)跨中弯矩双向板跨中弯矩的最不利活载位置图多跨连续双向板也需要考虑活载的最不利位置。
当求某跨跨中最大弯矩时,应在该跨布置活载,并在其前后左右每隔一区格布置活载,形成如上图(a)所示棋盘格式布置。
图(b)为A-A剖面中第2、第4区格板跨中弯矩的最不利活载位置。
为了能利用单跨双向板的弯矩系数表,可将图(b)的活载分解为图(c)的对称荷载情况和图(d)的反对称荷载情况,将图(c)与(d)叠加即为与图(b)等效的活载分布。
在对称荷载作用下,板在中间支座处的转角很小,可近似地认为转角为零,中间支座均可视为固定支座。
因此,所有中间区格均可按四边固定的单跨双向板计算;如边支座为简支,则边区格按三边固定、一边简支的单跨双向板计算;角区格按两邻边固定、两邻边简支的单跨双向板计算。
在反对称荷载作用下,板在中间支座处转角方向一致,大小相等接近于简支板的转角,所有中间支座均可视为简支支座。
因此,每个区格均可按四边简支的单跨双向板计算。
将上述两种荷载作用下求得的弯矩叠加,即为在棋盘式活载不利位置下板的跨中最大弯矩。
(2)支座弯矩支座弯矩的活载不利位置,应在该支座两侧区格内布置活载,然后再隔跨布置,考虑到隔跨活载的影响很小,可假定板上所有区格均满布荷载(g+p)时得出的支座弯矩,即为支座的最大弯矩。
双向板按弹性理论计算过程弹性变形是双向板在受到外力作用时产生变形或者尺寸的变化,且能够恢复的变形为弹性变形。
塑性变形双向板在外力作用下产生不可恢复的永久变形。
弹性分析方法是最基本和最成熟的结构分析方法,也是其他分析方法的基础和特例。
它是一种假设和简化的方法,不考虑双向板离散性和非线性性质。
适用于普通结构。
塑性内力重分布的分析方法可用于超静定混凝土结构设计。
弹塑性分析方法以钢筋混凝土的实际力学性能为依据,考虑塑性变形内力重分布。
引入相应的本构关系后,可进行结构受力全过程分析,且可以较好地解决各种体型和受力复杂结构的分析问题。
1、双向板按按弹性计算,同时应对支座弯矩进行调幅。
当边界支承位移对双向板的内力及变形有较大影响时,在分析中宜考虑边界支承竖向变形及扭转的影响。
重力荷载作用下的框架、框架-剪力墙结构中的现浇梁以及双向板等,经弹性分析求得内力后,可对支座或节点弯矩进行适度调幅,并确定相应的跨中弯矩。
钢筋混凝土板的负弯矩调幅幅度不宜大于20%。
2、连续单向板宜按塑性计算,同时应满足正常使用极限状态的要求或采取有效的构造措施。
混凝土连续梁和连续单向板,可采用塑性内力重分布方法进行分析。
3、双向板也可按塑性极限分析方法,主要用于周边有梁或墙支承的双向板设计。
承受均布荷载的周边支承的双向矩形板,可采用塑性铰线法或条带法等塑性极限分析方法进行承载能力极限状态的分析与设计。
从理论上说,弹性方法与塑性方法都没问题,但在实际工程中不同的计算方法钢筋用量相差20%。
针对不同的工程和板不同情况采用不同的结构分析方法,然后应根据经验取塑性或弹性计算结果作为最终的计算配筋。
4、工业建筑采用弹性方法,民用建筑采用塑性方法。
5、直接承受动荷载或重复荷载作用的构件、裂缝控制等级为一级或二级的构件、采用无明显屈服台阶钢筋的构件以及要求安全储备较高的结构应采用弹性方法。
6、地下室顶板、屋面板等有防水要求且荷载较大,考虑裂缝和徐变对构件刚度的影响,建议采用弹性理论计算。
(一)双向板按弹性理论的计算方法1.单跨双向板的弯矩计算为便于应用,单跨双向板按弹性理论计算,已编制成弯矩系数表,供设计者查用。
在教材的附表中,列出了均布荷载作用下,六种不同支承情况的双向板弯矩系数表。
板的弯矩可按下列公式计算:M=弯矩系数2×(g+p)lx{2M=αm p(g+p)lxαm p为单向连续板(αm b为连续梁)考虑塑性内力重分布的弯矩系数。
}式中M为跨中或支座单位板宽内的弯矩(k N·m/m);g、p为板上恒载及活载设计值(k N/m2);为板的计算跨lx度(m)。
2.多跨连续双向板的弯矩计算(1)跨中弯矩双向板跨中弯矩的最不利活载位置图多跨连续双向板也需要考虑活载的最不利位置。
当求某跨跨中最大弯矩时,应在该跨布置活载,并在其前后左右每隔一区格布置活载,形成如上图(a)所示棋盘格式布置。
图(b)为A-A剖面中第2、第4区格板跨中弯矩的最不利活载位置。
为了能利用单跨双向板的弯矩系数表,可将图(b)的活载分解为图(c)的对称荷载情况和图(d)的反对称荷载情况,将图(c)与(d)叠加即为与图(b)等效的活载分布。
在对称荷载作用下,板在中间支座处的转角很小,可近似地认为转角为零,中间支座均可视为固定支座。
因此,所有中间区格均可按四边固定的单跨双向板计算;如边支座为简支,则边区格按三边固定、一边简支的单跨双向板计算;角区格按两邻边固定、两邻边简支的单跨双向板计算。
在反对称荷载作用下,板在中间支座处转角方向一致,大小相等接近于简支板的转角,所有中间支座均可视为简支支座。
因此,每个区格均可按四边简支的单跨双向板计算。
将上述两种荷载作用下求得的弯矩叠加,即为在棋盘式活载不利位置下板的跨中最大弯矩。
(2)支座弯矩支座弯矩的活载不利位置,应在该支座两侧区格内布置活载,然后再隔跨布置,考虑到隔跨活载的影响很小,可假定板上所有区格均满布荷载(g+p)时得出的支座弯矩,即为支座的最大弯矩。
这样,所有中间支座均可视为固定支座,边支座则按实际情况考虑,因此可直接由单跨双向板的弯矩系数表查得弯矩系数,计算支座弯距。
当相邻两区格板的支承情况不同或跨度(相差小于20%)不等时,则支座弯距可偏安全地取相邻两区格板得出的支座弯矩的较大值。
(二)双向板按塑性理论的计算方法1.双向板的塑性铰线及破坏机构(1)四边简支双向板的塑性铰线及破坏机构(a)简支双向板的裂缝分布图(b)简支双向板的塑性铰线及破坏机构图均布荷载作用的四边简支双向板,板中不仅作用有两个方向的弯矩和剪力,同时还作用有扭矩。
由于短跨方向弯矩较大,故第一批裂缝出现在短跨跨中的板底,且与长跨平行(上图a)。
近四角处,弯矩减小,而扭矩增大,弯矩和扭矩组合成斜向主弯矩。
随荷载增大,由于主弯矩的作用,跨中裂缝向四角发展。
继续加大荷载,短跨跨中钢筋应力将首先到达屈服,弯矩不再增加,变形可继续增大,裂缝开展,使与裂缝相交的钢筋陆续屈服,形成如上图(b)所示的塑性铰线,直到塑性铰线将板分成以“铰轴”相连的板块,形成机构,顶部混凝土受压破坏,板到达极限承载力。
由于塑性铰线之间的板块处于弹性阶段,变形很小,而塑性铰线截面已进入屈服状态,有很大的局部变形。
因此,在均布荷载作用下,可忽略板块的弹性变形,假设各板块为刚片,变形(转角)集中于塑性铰线处,塑性铰线为刚片(板块)的交线,故塑性铰线必定为直线。
当板发生竖向位移时,各板块必各绕一旋转轴发生转动。
例如上图(b)中板块A绕a b轴(支座)转动,板块B绕a d轴(支座)转动。
因此两相邻板块之间的塑性铰线e a 必然通过两个板块旋转轴的交点a。
上述塑性铰线的基本特征,可用来推断板形成机构时的塑性铰线位置。
(2)四边连续双向板的塑性铰线及破坏机构均布荷载作用下四边连续双向板的塑性铰线及破坏机构图当板为四边连续板时,最大弯矩位于短跨的支座处,因此第一批裂缝出现在板顶面沿长边支座上,第二批裂缝出现在短跨跨中的板底或板顶面沿短边支座上(由于长跨的支座负弯矩所产生的)。
随荷载增加,短跨跨中裂缝分叉向四角发展,四边连续板塑性铰线的形成次序是,短跨支座截面负弯矩钢筋首先屈服,弯矩不再增加,然后短跨跨中弯矩急剧增大,到达屈服。
在短跨支座及跨中截面屈服形成塑性铰线后,短跨方向刚度显著降低。
继续增加的荷载将主要由长跨方向负担,直到长跨支座及跨中钢筋相继屈服,形成机构,到达极限承载力,其塑性铰线如上图所示。
与简支板不同的是四边连续板支座处的塑性铰代替了简支板支座的实际铰。
2.均布荷载作用下双向板的极限荷载双向板四个板块的极限平衡受力图(1)按塑性理论计算双向板的基本公式(四边连续双向板的极限荷载)为了简化计算,可取角部塑性铰线倾斜角为45o。
按照均布荷载作用下四边连续双向板的塑性铰线及破坏机构图(取虚位移δ=1)利用虚功原理,或按照双向板四个板块的极限平衡受力图利用力矩平衡方程,可求得按塑性理论计算双向板的基本公式(四边连续双向板的极限荷载):q lx 2(3ly-lx)/12=2Mx +2My+Mx'+Mx ”+My'+My”式中q为均布极限荷载;lx 、ly分别为短跨、长跨(净跨);Mx 、My分别为跨中塑性铰线上两个方向的总弯矩:Mx =lymxMy =lxmymx、my分别为跨中塑性铰线上两个方向单位宽度内的极限弯矩;Mx '、Mx”、My '、My”分别为两个方向支座塑性铰线上的总弯矩:Mx '=Mx”=lymx'=ly mx”My '=My”=lxmy'=lx my”mx'=mx”、my '=my”分别为两个方向支座塑性铰线上单位宽度内的极限弯矩。
(2)按塑性理论计算四边简支双向板的极限荷载四边简支双向板属四边连续板的特例,令Mx '=Mx”=My'=My”=0,即为四边简支双向板的极限荷载计算公式:q lx 2(3ly-lx)/24=Mx +My3.双向板的设计公式(1)两个方向弯矩比值的选定设计双向板时,通常已知板的荷载设计值q 和净跨l x、l y,要求计算板的弯距和配筋。
在四边连续板的一般情况下,有4个未知量:m x、m y、m x'=m x”、m y'=m y”,而只有一个方程式,不可能求得唯一的解,故需先选定弯矩间的比值α、β:α=m y/m xβ=m x'/m x=m x”/m x=m y'/m y=m y”/m y设板的长短跨比n=l y/l x,通常可取α=1/n2。
为了避免β值过小(β<1.5)使支座截面弯矩调幅过大,导致裂缝的过早开展;并考虑到将支座负弯矩钢筋在距支座边l x/4处截断,为避免形成局部破坏机构,降低极限荷载,β值也不应大于2.5。
设计时可取β=1.5~2.5。
(2)跨中钢筋全部伸入支座时的弯距和配筋如跨中钢筋全部伸入支座,则由基本公式可求得mx:mx =(3n-1)q lx2/24(n+α)(1+β)由选定的α、β可依次计算m y、mx '=mx”、my '=my”,再根据这些弯矩计算跨中及支座截面所需配置的受力钢筋。
(3)四边连续板跨中钢筋截断或弯起时的弯距和配筋四边连续板跨中钢筋的截断或弯起图为充分利用钢筋,可将连续板的跨中正弯矩钢筋在一定距离处截断,或弯起一部分作为支座负弯矩钢筋。
但如果截断钢筋的数量过多,有可能使截断(或弯起)处钢筋先达到屈服,形成新的极限荷载较低的破坏机构。
为防止出现这种情况,通常在距支座/4处将跨中正lx弯矩钢筋截断或弯起一半,如上图所示。
采用上图所示的截断钢筋位置和数量,将不会形成新的破坏机构。
对于四边连续板,由基本公式可求得mx:mx =(3n-1)q lx2/12[2(n-0.25)+1 .5α+2nβ+2αβ]4.设计公式的应用双向板楼盖的计算,一般先从中间区格开始,如上图中板B1,然后再计算边区格板B2及B3,最后计算角区格B4。
(1)中间区格板板B1为四边连续板,按照已知的荷载设计值q、净跨lx 、ly及选定的α、β值,采用前述有关公式可求得mx,并依次算出my、mx '=mx”、my '=my”,再根据这些弯矩计算跨中及支座截面所需配置的受力钢筋。
(2)边区格板板B2为三边连续,一短边简支(my'=0)。
另一短边支座a是B2与B1的公共支座,其配筋在计算板B1时已确定,即B2板的支座弯矩my”为已知,计算时需将my'=0及已知的my”代入基本公式,按选定的α、β值可求得mx,并依次算出my、mx '=mx”,再根据这些弯矩计算跨中及支座截面所需配置的受力钢筋。
如考虑在距支座lx/4处将跨中正弯矩钢筋截断或弯起一半,则按下式求mxmx =[(3n-1)q lx2/12-my”]/[2(n-0.2 5)+1.5α+2nβ]板B3为三边连续,一长边简支(mx'=0)。
另一长边支座b的配筋在计算板B1时已确定,即B3板的支座弯矩mx”为已知,计算时将mx'=0及已知的mx”代入基本公式,按选定的α、β值可求得mx,并依次算出my 、my'=my”,再根据这些弯矩计算跨中及支座截面所需配置的受力钢筋。
如考虑在距支座lx/4处将跨中正弯矩钢筋截断或弯起一半,则按下式求mxmx =[(3n-1)q lx2/12-n mx”]/[2( n-0.25)+1.5α+ 2αβ](3)角区格板板B4为两相邻边连续,其余两边简支。
其连续支座c与d的配筋,在计算板B2与板B3时已经确定,即支座d的弯矩mx”和支座c的弯矩my”均为已知,且跨中钢筋宜全部伸入简支支座,则:mx =[(3n-1)q lx2/12-my ”-n mx”]/[2(n+α)](三)双向板的配筋构造1. 弯矩折减系数在设计周边与梁整体连接的双向板时,应考虑极限状态下周边支承梁对板的推力的有利影响,截面的弯矩设计值可予以折减。
折减系数按下列规定采用:(1)对于连续板中间区格的跨中截面和中间支座截面,折减系数为0.8;(2)对于边区格的跨中截面和自楼板边缘算起的第二支座截面:当/l<1.5时,折lb减系数为0.8;当1.5≤l/l≤2时,b折减系数为0.9;式中lb为边区格沿楼板边缘方向的跨度,l为垂直于楼板边缘方向的跨度。
(3)对于角区格的各截面,不应折减。
2. 钢筋布置(1)板的有效高度与内力臂系数由于短跨方向的弯矩比长跨方向弯矩大,故短跨方向的受力钢筋应放在长跨方向受力钢筋的外侧(在跨中正弯矩截面短跨方向钢筋放在下排;支座负弯矩截面短跨方向钢筋放在上排),以充分利用板的有效高度h0。
在估计h时:短向h=h-20m m;长向h=h-30m m。