自动控制原理基础讲义教材
- 格式:ppt
- 大小:16.88 MB
- 文档页数:484
自动控制原理:以自动控制系统为对象,学习研究从各类控制系统所抽象出来的,具有共性的规律(组成原理,数学模型,各种分析方法及基本设计方法)。
抽象性、综合性较强,用较多的数学工具解决应用问题。
第一章1.1 引言1.1.1 基本概念(1)自动控制:不需要人直接参与,而使被控量自动的按预定规律变化的过程,叫自动控制。
①不需要人直接参与;②被控量按预定规律变化。
(2)自动控制系统:为实现某一控制目标所需要的所有物理部件的有机组合体①实体;②有机组合1.1.2 自动控制技术及应用自动控制应用极为广泛,在工业、国防、航空航天、交通、农业、经济管理、以及人们的日常生活,处处可见。
1.1.3 自动控制理论的发展 一般可分为三个阶段:(1)第一阶段。
时间为本世纪40~60年代,称为“经典控制理论”时期。
三大分析方法:时域分析法、根轨迹分析法、频域分析法.(2)第二阶段。
时间为本世纪60~70年代,称为“现代控制理论”时期。
(3)第三阶段。
时间为本世纪70年代末至今。
70年代末,控制理论向着“智能控制”方向发展。
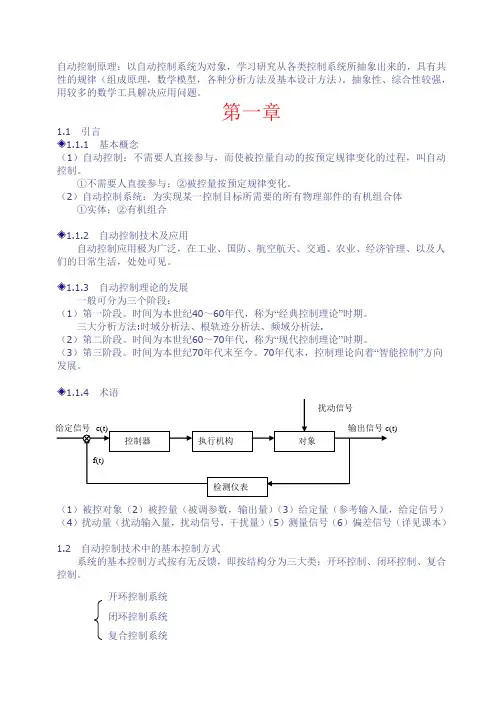
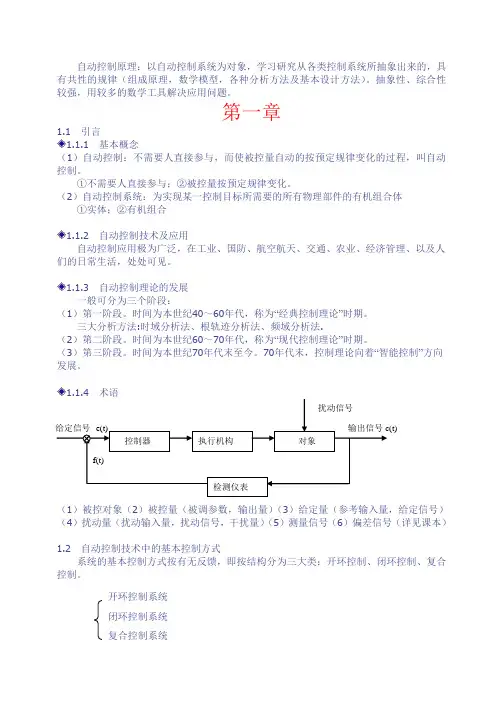
(1)被控对象(2)被控量(被调参数,输出量)(3)给定量(参考输入量,给定信号)(4)扰动量(扰动输入量,扰动信号,干扰量)(5)测量信号(6)偏差信号(详见课本)1.2 自动控制技术中的基本控制方式系统的基本控制方式按有无反馈,即按结构分为三大类:开环控制、闭环控制、复合控制。
1.2.1 开环控制系统 (1)定义开环控制是一种最简单的控制方式,在控制器与被控对象之间只有正向控制作用而没有反馈控制作用,即系统的输出量对控制量没有影响。
示意图:优点:结构简单、调整方便、成本低缺点:控制精度低、对扰动没有控制能力。
用于输出精度要求低的场合。
若出现扰动,只能靠人工操作,使输出达到期望值1.2.2 闭环控制系统——重点控制装置与被控对象之间既有正向作用,又有反向联系的控制过程,也称为反馈控制①系统的输出参与控制,系统结构图构成回路②依靠偏差进行控制的系统,只要偏差存在,就有控制作用,其结果试图使偏差减小 ③控制精度高④对系统内部除反馈通道和给定通道外的一切扰动都有抑制作用 ⑤引起振荡1.2.3 复合控制系统将开环控制和闭环控制系统结合在一起,构成复合控制系统。
第一章自动控制原理的基本概念主要内容:自动控制的基本知识开环控制与闭环控制自动控制系统的分类及组成自动控制理论的发展§1.1 引言控制观念生产和科学实践中,要求设备或装置或生产过程按照人们所期望的规律运行或工作。
同时,干扰使实际工作状态偏离所期望的状态。
例如:卫星运行轨道,导弹飞行轨道,加热炉出口温度,电机转速等控制控制:为了满足预期要求所进行的操作或调整的过程。
控制任务可由人工控制和自动控制来完成。
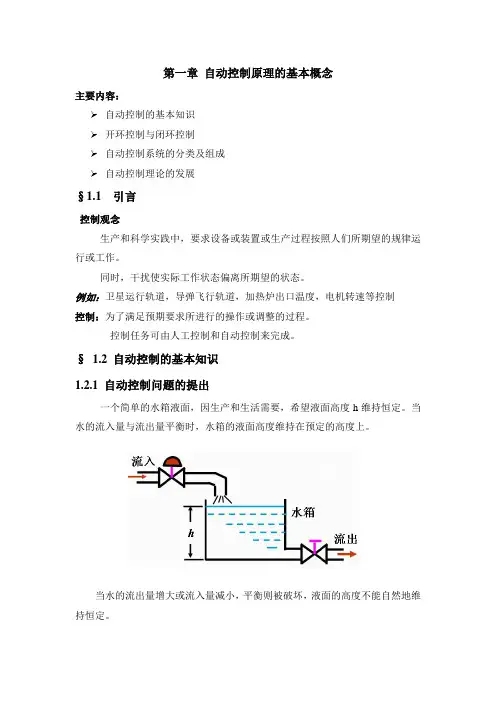
§ 1.2 自动控制的基本知识1.2.1 自动控制问题的提出一个简单的水箱液面,因生产和生活需要,希望液面高度h维持恒定。
当水的流入量与流出量平衡时,水箱的液面高度维持在预定的高度上。
当水的流出量增大或流入量减小,平衡则被破坏,液面的高度不能自然地维持恒定。
所谓控制就是强制性地改变某些物理量(如上例中的进水量),而使另外某些特定的物理量(如液面高度h)维持在某种特定的标准上。
人工控制的例子。
这种人为地强制性地改变进水量,而使液面高度维持恒定的过程,即是人工控制过程。
1.2.2 自动控制的定义及基本职能元件1. 自动控制的定义自动控制就是在没有人直接参与的情况下,利用控制器使被控对象(或过程)的某些物理量(或状态)自动地按预先给定的规律去运行。
当出水与进水的平衡被破坏时,水箱水位下降(或上升),出现偏差。
这偏差由浮子检测出来,自动控制器在偏差的作用下,控制阀门开大(或关小),对偏差进行修正,从而保持液面高度不变。
2. 自动控制的基本职能元件自动控制的实现,实际上是由自动控制装置来代替人的基本功能,从而实现自动控制的。
画出以上人工控制与动控制的功能方框图进行对照。
比较两图可以看出,自动控制实现人工控制的功能,存在必不可少的三种代替人的职能的基本元件:测量元件与变送器(代替眼睛)自动控制器(代替大脑)执行元件(代替肌肉、手)这些基本元件与被控对象相连接,一起构成一个自动控制系统。
下图是典型控制系统方框图。
自动控制原理课件全套教程目录一、基本概念与术语 (3)1.1 自动控制的基本概念 (5)1.2 自动控制系统的组成 (6)1.3 自动控制系统的分类 (7)二、控制系统的数学模型 (8)2.1 系统微分方程的建立 (10)2.2 系统传递函数的推导 (11)2.3 系统的频率特性 (12)三、控制系统的时域分析 (13)3.1 系统的稳定性分析 (15)3.2 系统的动态性能分析 (15)四、控制系统的频域分析 (17)4.1 频率特性的图形表示 (19)4.2 频率特性的性能分析 (19)4.3 系统的稳定性判定 (21)五、控制系统的校正与设计 (22)5.1 系统的静态校正 (23)5.2 系统的动态校正 (25)5.3 控制系统的工程设计方法 (27)六、控制系统仿真与计算机辅助设计 (29)6.1 控制系统仿真概述 (31)6.2 仿真软件的应用 (32)6.3 计算机辅助设计在控制系统中的应用 (34)七、经典控制理论及应用 (36)7.1 串联校正与并联校正 (37)7.2 比例、积分、微分控制器 (38)7.3 控制系统的工程实现 (39)八、现代控制理论简介 (41)8.1 最优控制理论 (42)8.2 线性系统理论 (44)8.3 非线性系统理论 (45)九、控制系统的应用与实例分析 (47)9.1 工业自动化中的控制系统应用 (49)9.2 交通运输中的控制系统应用 (50)9.3 生物医学工程中的控制系统应用 (52)十、课程总结与展望 (54)10.1 课程内容回顾 (54)10.2 自动控制技术的发展趋势 (56)10.3 个人学习与发展建议 (57)一、基本概念与术语在自动化工程领域,自动控制原理是研究如何实现系统的自动化运行和远程监控的科学。
为了更好地理解这一领域,我们需要先明确一些基本概念和术语。
自动控制系统:自动控制系统是一种能够实现对生产过程或设备进行自动调节和控制的网络系统。
自动控制原理讲义第一章概述1.1自动控制系统基本概念1.2自动控制系统的组成和基本特点1.3自动控制的作用和意义1.4自动控制系统的发展历程第二章数学模型与传递函数2.1控制系统的模型化2.2传递函数的定义与性质2.3电气系统的传递函数2.4机械系统的传递函数2.5热系统的传递函数2.6液压系统的传递函数第三章时域分析与性能指标3.1控制系统的时域响应3.2控制系统的稳定性分析3.3闭环控制系统的稳态误差3.4控制系统的性能指标第四章线性系统的根轨迹法4.1根轨迹的定义与性质4.2根轨迹的绘制方法4.3根轨迹与系统性能的关系4.4根轨迹法的应用举例第五章频域分析与稳定性5.1频域分析的基本概念与方法5.2 Nyquist准则与稳定性判据5.3 Bode图与频率响应5.4频域法在系统设计中的应用第六章频域设计与校正6.1控制系统的校正问题6.2极点配置法与频率域设计6.3 Bode积分法与相位校正6.4全套控制器的设计与校正实例第七章系统鲁棒性与鲁棒控制7.1系统鲁棒性的定义与评估7.2H∞控制理论与方法7.3鲁棒控制的应用举例与原理第八章自适应控制8.1自适应控制的基本概念与原理8.2参数识别与模型跟踪8.3自适应控制器设计与应用例子8.4自适应控制的发展与前景第九章非线性系统与控制9.1非线性系统的基本概念与性质9.2非线性系统的稳定性分析9.3非线性系统的控制方法9.4非线性系统的应用实例第十章控制系统优化与参数优化10.1控制系统的优化问题10.2优化理论与方法10.3控制器参数优化的举例与原理第十一章模糊控制与神经网络控制11.1模糊控制的基本概念与原理11.2模糊控制系统的设计与应用例子11.3神经网络控制的基本概念与原理11.4神经网络控制系统的设计与应用例子第十二章智能控制与拓展12.1智能控制基本概念与发展12.2智能控制系统的设计与应用例子12.3控制系统的拓展与创新结语自动控制原理的讲义主要介绍了自动控制系统的基本概念、组成和基本特点,以及自动控制的作用和意义。


自动控制原理:以自动控制系统为对象,学习研究从各类控制系统所抽象出来的,具有共性的规律(组成原理,数学模型,各种分析方法及基本设计方法)。
抽象性、综合性较强,用较多的数学工具解决应用问题。
第一章1.1 引言1.1.1 基本概念(1)自动控制:不需要人直接参与,而使被控量自动的按预定规律变化的过程,叫自动控制。
①不需要人直接参与;②被控量按预定规律变化。
(2)自动控制系统:为实现某一控制目标所需要的所有物理部件的有机组合体①实体;②有机组合1.1.2 自动控制技术及应用自动控制应用极为广泛,在工业、国防、航空航天、交通、农业、经济管理、以及人们的日常生活,处处可见。
1.1.3 自动控制理论的发展 一般可分为三个阶段:(1)第一阶段。
时间为本世纪40~60年代,称为“经典控制理论”时期。
三大分析方法:时域分析法、根轨迹分析法、频域分析法.(2)第二阶段。
时间为本世纪60~70年代,称为“现代控制理论”时期。
(3)第三阶段。
时间为本世纪70年代末至今。
70年代末,控制理论向着“智能控制”方向发展。
(1)被控对象(2)被控量(被调参数,输出量)(3)给定量(参考输入量,给定信号)(4)扰动量(扰动输入量,扰动信号,干扰量)(5)测量信号(6)偏差信号(详见课本)1.2 自动控制技术中的基本控制方式系统的基本控制方式按有无反馈,即按结构分为三大类:开环控制、闭环控制、复合控制。
1.2.1 开环控制系统 (1)定义开环控制是一种最简单的控制方式,在控制器与被控对象之间只有正向控制作用而没有反馈控制作用,即系统的输出量对控制量没有影响。
示意图:优点:结构简单、调整方便、成本低缺点:控制精度低、对扰动没有控制能力。
用于输出精度要求低的场合。
若出现扰动,只能靠人工操作,使输出达到期望值1.2.2 闭环控制系统——重点控制装置与被控对象之间既有正向作用,又有反向联系的控制过程,也称为反馈控制①系统的输出参与控制,系统结构图构成回路②依靠偏差进行控制的系统,只要偏差存在,就有控制作用,其结果试图使偏差减小 ③控制精度高④对系统内部除反馈通道和给定通道外的一切扰动都有抑制作用 ⑤引起振荡1.2.3 复合控制系统将开环控制和闭环控制系统结合在一起,构成复合控制系统。