自动控制原理 讲义03.
- 格式:ppt
- 大小:1.30 MB
- 文档页数:20
第二节CZ-AC型自动控制原理实验箱与THDAQ虚拟实验设备1.1 THDAQ-USB2.0计算机辅助实验系统简介THDAQ-USB 2.0计算机辅助实验系统是用虚拟仪器技术实现的软硬件相结合的组合仪器系统。
它以计算机为基础,集双通道低频数字存储示波器、双通道程控函数信号发生器于一体,既可与自控原理、信号与系统、模拟电路等实验箱相结合,完成各种复杂的实验内容,也可在工程实践中发挥作用,完成各种低频信号的测试、测量功能。
硬件上它通过USB口与计算机相连,方便快捷,台式机、笔记本电脑均可使用。
技术性能1、信号采集部分AD性能:双通道,12位AD采样频率:最高500K SPSAD采样幅度综合误差:±1LSBAD输入阻抗:1兆欧AD输入电压范围:-10V~+10VX轴时基:50us~20s/divY轴灵敏度:20mV~5V/div(1X探头)触发方式:PC机软件触发2、信号源部分DA性能:双通道,12位信号波形类型:正弦波、方波、三角波、锯齿波、脉冲等信号输出频率:0.01Hz~10KHz信号输出幅度:-5V~+5V系统配置PC机要求:较新配置计算机(台式机、笔记本均可),带USB 2.0接口操作系统:Windows2000/WindowsXP/Windows7 32位1.2 THDAQ-VILAB虚拟仪器套件使用说明一、概述THDAQ-VILAB用户说明向用户简单介绍如何安装和使用THDAQ-VILAB虚拟仪器套件。
本使用说明包含软件基本功能,基本操作和使用注意事项等内容。
THDAQ-VILAB虚拟仪器套件是我公司开发研制的新型虚拟测试仪器。
它可以产生多种信号,并具有双通道示波器功能。
其主要包含两大模块:任意信号发生器,双通道虚拟示波器。
1.1驱动安装(1)用USB2.0扁口线把采集卡与主机相连,打开电源开关S1,完成物理连接。
在桌面下方弹出发现新硬件的提示如图1-1;图1-1(2)在主机上自动弹出搜索驱动的对话框如图1-2,选择从列表或指定位置安装(高级)选项,点击下一步;图1-2(3)根据新硬件安装向导,进行安装,在如图1-3中输入驱动程序所在的路径,点击下一步;图1-3(4)将采集卡的驱动程序包THDAQ_ALLversion所在的位置输入相应的对话框,将THDAQloader.sys进行安装完毕后,会弹出如图1-4所示向导;图1-4(5)单击“仍然继续”按钮,安装ezusb.sys,主机显示此设备可以使用了。
第一章自动控制原理的基本概念主要内容:自动控制的基本知识开环控制与闭环控制自动控制系统的分类及组成自动控制理论的发展§1.1 引言控制观念生产和科学实践中,要求设备或装置或生产过程按照人们所期望的规律运行或工作。
同时,干扰使实际工作状态偏离所期望的状态。
例如:卫星运行轨道,导弹飞行轨道,加热炉出口温度,电机转速等控制控制:为了满足预期要求所进行的操作或调整的过程。
控制任务可由人工控制和自动控制来完成。
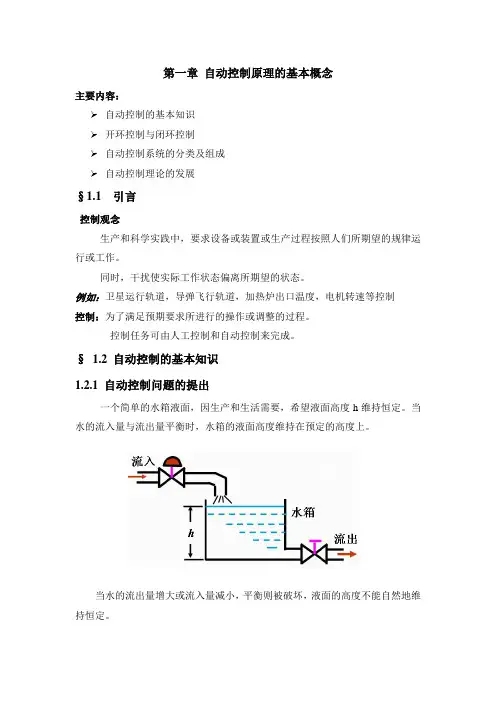
§ 1.2 自动控制的基本知识1.2.1 自动控制问题的提出一个简单的水箱液面,因生产和生活需要,希望液面高度h维持恒定。
当水的流入量与流出量平衡时,水箱的液面高度维持在预定的高度上。
当水的流出量增大或流入量减小,平衡则被破坏,液面的高度不能自然地维持恒定。
所谓控制就是强制性地改变某些物理量(如上例中的进水量),而使另外某些特定的物理量(如液面高度h)维持在某种特定的标准上。
人工控制的例子。
这种人为地强制性地改变进水量,而使液面高度维持恒定的过程,即是人工控制过程。
1.2.2 自动控制的定义及基本职能元件1. 自动控制的定义自动控制就是在没有人直接参与的情况下,利用控制器使被控对象(或过程)的某些物理量(或状态)自动地按预先给定的规律去运行。
当出水与进水的平衡被破坏时,水箱水位下降(或上升),出现偏差。
这偏差由浮子检测出来,自动控制器在偏差的作用下,控制阀门开大(或关小),对偏差进行修正,从而保持液面高度不变。
2. 自动控制的基本职能元件自动控制的实现,实际上是由自动控制装置来代替人的基本功能,从而实现自动控制的。
画出以上人工控制与动控制的功能方框图进行对照。
比较两图可以看出,自动控制实现人工控制的功能,存在必不可少的三种代替人的职能的基本元件:测量元件与变送器(代替眼睛)自动控制器(代替大脑)执行元件(代替肌肉、手)这些基本元件与被控对象相连接,一起构成一个自动控制系统。
下图是典型控制系统方框图。
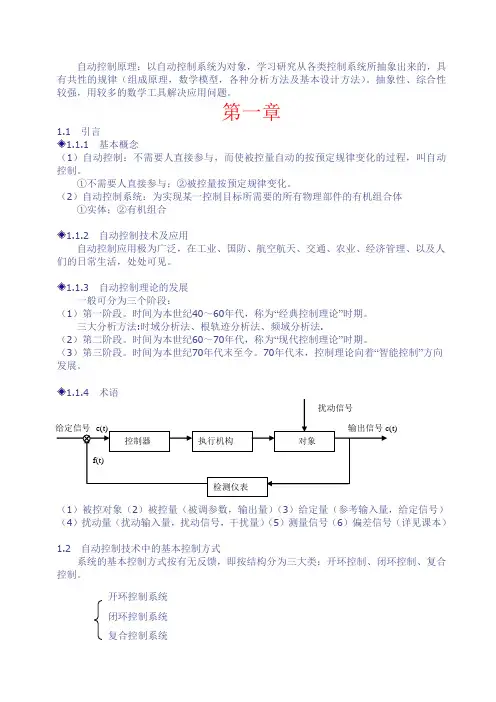

自动控制原理讲义第一章概述1.1自动控制系统基本概念1.2自动控制系统的组成和基本特点1.3自动控制的作用和意义1.4自动控制系统的发展历程第二章数学模型与传递函数2.1控制系统的模型化2.2传递函数的定义与性质2.3电气系统的传递函数2.4机械系统的传递函数2.5热系统的传递函数2.6液压系统的传递函数第三章时域分析与性能指标3.1控制系统的时域响应3.2控制系统的稳定性分析3.3闭环控制系统的稳态误差3.4控制系统的性能指标第四章线性系统的根轨迹法4.1根轨迹的定义与性质4.2根轨迹的绘制方法4.3根轨迹与系统性能的关系4.4根轨迹法的应用举例第五章频域分析与稳定性5.1频域分析的基本概念与方法5.2 Nyquist准则与稳定性判据5.3 Bode图与频率响应5.4频域法在系统设计中的应用第六章频域设计与校正6.1控制系统的校正问题6.2极点配置法与频率域设计6.3 Bode积分法与相位校正6.4全套控制器的设计与校正实例第七章系统鲁棒性与鲁棒控制7.1系统鲁棒性的定义与评估7.2H∞控制理论与方法7.3鲁棒控制的应用举例与原理第八章自适应控制8.1自适应控制的基本概念与原理8.2参数识别与模型跟踪8.3自适应控制器设计与应用例子8.4自适应控制的发展与前景第九章非线性系统与控制9.1非线性系统的基本概念与性质9.2非线性系统的稳定性分析9.3非线性系统的控制方法9.4非线性系统的应用实例第十章控制系统优化与参数优化10.1控制系统的优化问题10.2优化理论与方法10.3控制器参数优化的举例与原理第十一章模糊控制与神经网络控制11.1模糊控制的基本概念与原理11.2模糊控制系统的设计与应用例子11.3神经网络控制的基本概念与原理11.4神经网络控制系统的设计与应用例子第十二章智能控制与拓展12.1智能控制基本概念与发展12.2智能控制系统的设计与应用例子12.3控制系统的拓展与创新结语自动控制原理的讲义主要介绍了自动控制系统的基本概念、组成和基本特点,以及自动控制的作用和意义。