自控作业答案
- 格式:pdf
- 大小:364.17 KB
- 文档页数:9
2020年有限空间作业考试588题【含答案】
一、单选题
1.以下哪些条件不属于1级作业环境判定标准()。
A.氧含量小于19.5%或大于23.5%
B.可燃性气体.蒸气浓度大于爆炸下限(LEL)的10%
C.氧含量为19.5%~23.5%
D.有毒有害气体.蒸气浓度大于GBZ 2.1规定的限值
正确答案.C
2.()环境必须同时进行监护检测和个体检测。
A.0级
B.1级
C.2级
D.3级
正确答案.C
3.下列不属于有限空间事故预防对策的是()。
A.加强教育培训
B.严格执行操作规程
C.完善各项管理制度
D.减少作业者数量
正确答案.D
4.对有限空间作业场所进行()是有效降低其内部有毒有害气体浓度,减轻作业危害的重要手段。
A.设置警示区域
B.隔离管道
C.气体检测
D.通风换气
正确答案.D
5.有限空间分为密闭设备.地上有限空间和()。
A.地下有限空间
B.受限空间
C.密闭空间
D.限值空间。
自控练习题答案一、选择题1. D2. A3. C4. B5. D6. A7. C8. B9. A 10. D二、填空题1. 自律2. 集中注意力3. 目标4. 执行力5. 推迟满足感6. 时间管理7. 自我约束8. 内在动机9. 意志力 10. 时间三、判断题1. 正确2. 错误3. 正确4. 错误5. 错误6. 正确7. 正确8. 错误9. 正确10. 错误四、简答题1. 什么是自控力?自控力是指个体自觉且有效地控制自己的想法、情绪和行为,以实现长远目标,并抵制诱惑和延迟满足的能力。
2. 自控力为什么重要?自控力是个人成功和幸福的关键因素之一。
它能帮助我们更好地管理时间、保持健康的生活方式、建立良好的人际关系、克服困难和挫折,以及实现个人目标。
3. 自控力如何培养?- 树立明确的目标:明确自己想要实现的目标,并将其分解为小步骤,有计划地逐步实现。
- 锻炼意志力:通过日常生活中的小练习,如控制睡眠时间、克制购物欲望等,逐渐增强意志力。
- 建立良好习惯:通过坚持良好的习惯,如定期锻炼、读书学习等,养成自律的生活方式。
- 寻找内在动机:激发内在动机,找到自己行动的内在意义和价值,这将有助于提高自控力。
- 与他人互助:与身边有自控力的人交流和分享经验,互相鼓励和监督,相互促进自控力的提高。
4. 如何处理自控力不足的情况?- 分析原因:找到自己自控力不足的原因,是因为外界诱惑太多还是自我约束能力不足等。
- 制定策略:根据不同的原因,制定对应的应对策略,如减少外界诱惑、进行时间管理等。
- 寻求支持:向身边的人求助,如朋友、家人或专业人士,获得支持、鼓励和指导。
- 培养耐心:自控力的培养是一个长期的过程,需要耐心和坚持,不要因一时的失败而灰心。
五、综合题自控力对个人发展的影响自控力对个人的发展具有重要的影响。
首先,自控力能帮助人们更好地管理时间,合理分配精力和资源,提高工作效率和学习成绩。
其次,自控力有助于保持健康的生活方式,如健康饮食、规律作息和适量运动,从而增强身体素质和提升生活质量。
作业3-11,3-12,3-15.。
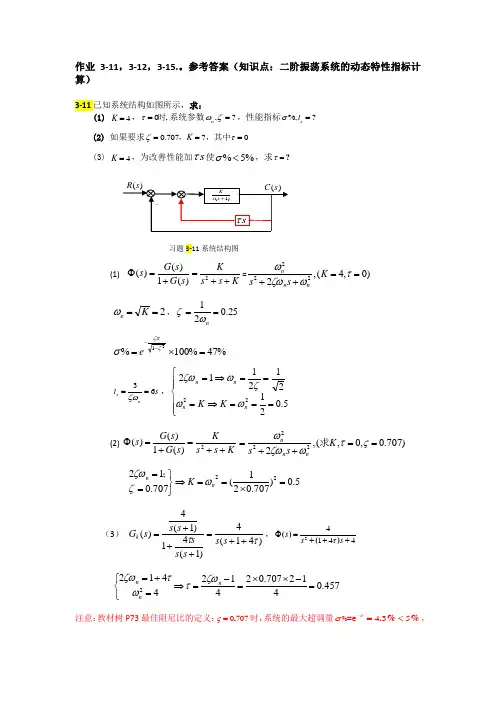
参考答案(知识点:二阶振荡系统的动态特性指标计算)3-11已知系统结构如图所示,求:(1) 4K =,0,τ=时系统参数,?n ωζ=,性能指标%,?s t σ=(2) 如果要求0.707?0K ζτ===,,其中(3) 4K =,为改善性能加s τ使%5%σ<,求τ=?习题3-11系统结构图(1) K s s K s G s G s ++=+=Φ2)(1)()(=)0,4(,2222==++τωζωωK s s nn n 2==K n ω,25.021==n ωζ %47%100%21=⨯=--ζζπσe 36s n t s ζω==,⎪⎪⎩⎪⎪⎨⎧===⇒===⇒=5.021********n n n n K K ωωζωζω (2) K s s K s G s G s ++=+=Φ2)(1)()()707.0,0,(,2222==++=ςτωζωωK s s nn n 求 5.0)707.021(707.01222=⨯==⇒⎭⎬⎫==n n K ωζζω; (3) )41(4)1(41)1(4)(ττ++=+++=s s s s s s s s G k ,24144s s s τΦ=+++()() 457.0412707.024*******=-⨯⨯=-=⇒⎩⎨⎧=+=n n n ζωτωτζω 注意:教材树P73最佳阻尼比的定义:0707ς=.时,系统的最大超调量435πσ-=<.%%%=e ,1.3调节时间最短,即平稳性和快速性最佳。
本题的启示:(1)求得原系统的超调量47σ=%%非常大,(2)为了降低超调<5%,降低了开环增益K 。
(注意:求解稳态误差时,为了提高精度,可以增大开环增益。
当设计者进行系统参数设定时,需要兼顾动静态指标) (3)为了降低超调<5%,在前向通道环节引入了微分环节。
3-12已知系统的单位阶跃响应曲线如图所示,求系统的闭环传递函数。
“博学”计算机测评系统《自控力》考试题库(含答案)一、单选题1.本书的观点认为:你会在每一章中看到两类作业,它们会帮你成为自控力科学家。
第一类作业笔者称为()。
A、深入剖析B、意志力实验C、发现自我D、认识自我参考答案:A2.()只是是人性的一部分,不能说明自己永远不会成功。
A、幸福B、挫折C、痛苦D、荣誉参考答案:B3.乐观给我们动力,少许的悲观能帮主我们走向()。
A、失败B、成功C、堕落D、绝望参考答案:B4.《自控力》这本书的作者的经纪人是()。
A、大卫.德斯丹诺B、韦格纳C、马克·罗森D、特德·温斯坦参考答案:D5.睡眠不足会影响向身体和大脑吸收()。
A、食物B、葡萄糖C、麦芽糖D、肝糖原参考答案:B6.心理学家罗伯特·德沃夏克和南达科他大学研究员X.T.王认为,现代人的大脑可能仍把()含量作为资源稀缺或资源充足的标志。
A、葡萄糖B、血糖C、氧气D、红细胞参考答案:B7.大脑中一个受刺激会产生强烈快感的区域,科学家詹姆斯·奥尔兹和彼得·米尔纳将它称为大脑的()。
A、神经中枢B、交通枢纽C、快感中心D、协调中心参考答案:C8.本书的观点是:从压力和自控力中恢复的最佳途径是()。
A、放弃B、紧张C、放松D、忍耐参考答案:C9.大脑会把未来的自己当成别人,这种习惯对()影响极大。
A、意志力B、控制力C、自控力D、想象力参考答案:C10.如果我们感觉和()的自己毫无关联,就会忽略自己行为的后果。
A、过去B、现在C、即时D、未来参考答案:D11.人们往往会用()去猜测别人的目的可以让我们预测别人的行为,避免社会灾难。
A、本能B、社会脑C、直觉D、以上均不是参考答案:B12.本书的观点是:就像通过锻炼能增加肌肉一样,通过一定的训练,大脑中某些区域的密度会(),会聚集更多的灰质。
A、变大B、变小C、不变D、变少参考答案:A13.只要使你放纵的东西和使你觉得品德高尚的的东西同时出现,就会产生()。
2020年有限空间作业考试588题【含答案】
一、单选题
1.以下不属于监护者职责的是 ()。
A.确认作业者进入有限空间前安全防护措施有效
B.在有限空间外持续监护
C.防止无关人员进入作业区域
D.授权批准作业
正确答案.D
2.《中华人民共和国安全生产法》规定,从业人员有权拒绝()和强令冒险作业。
A.错误指挥
B.违章指挥
C.应急指挥
D.违章作业
正确答案.B
3.在忽略作业环境气压因素影响条件下,已知环境温度为27℃时,气体检测仪检测到污水井中硫化氢气体的体积浓度为9ppm,其实相当于质量浓度()。
A.10mg/m3
B.12 mg/m3
C.13 mg/m3
D.14 mg/m3
正确答案.C
4.清洗液化石油气储罐时应使用()。
A.氧气
B.空气
C.氮气
D.水
正确答案.C
5.化粪池.污水井容易发生()中毒事故。
A.硫化氢
B.氯气
C.苯
D.甲苯。
第一章1-2 自动控制系统的主要特征是什么?答:(1)在结构上,系统必须具有反馈装置,并按负反馈的原则组成系统。
采用负反馈的目的是求得偏差信号。
(2)由偏差产生控制作用。
(3)控制的目的是力图减小或消除偏差,使被控量尽量接近期望值。
1-3 自动控制系统一般由哪些环节组成?它们在控制过程中负担什么功能?答:一个完善的控制系统通常由测量反馈元件、比较元件、放大元件、校正元件、执行元件及被控对象等基本环节组成。
各元件的功能如下: (1) 测量反馈元件——用以测量被控量并将其转换成合输入量同一物理量后,再反馈到输入端以作比较。
(2) 比较元件——用来比较输入信号与反馈信号,并产生反应二者差值的偏差信号。
(3) 放大元件——将微弱的信号作线性放大。
(4) 校正元件——根据偏差信号的性质执行相应的控制作用,以便使被控量按期望值变化。
(5)被控对象——通常指生产过程中需要进行控制的工作机械或生产过程。
1-7 试比较开环控制系统和闭环控制系统的优缺点。
答:(1)只存在输入量对输出量的单向控制作用,输出量与输入量之间不存在反馈回路,这样的系统称为开环控制系统。
其优点:结构简单、造价低。
缺点:控制精度低,没有抵抗外部干扰的能力。
(2)通过反馈通道使系统构成闭环,并按偏差的性质产生控制作用,以求减小或消除偏差的控制系统称为闭环控制系统。
其优点:尤其采用的负反馈回路,系统对外部或内部干扰不甚敏感,故可采用不太精密的元件构成较为精密的控制系统(即具有较强的抗干扰能力,控制精度高)。
缺点:由于采用反馈装置,导致设备增多,线路复杂。
若参数配合不当,可能导致系统不稳定。
第二章2-1 求如图所示RC 电路和运算放大器的传递函数。
(提示:一定要学会一个画电路的软件和电路仿真软件!!!) 解:(b )1112222121221212121,1()()(1)()()O I Z R C s Z R C sU s Z U s Z Z C R C s R R C C s C C =+=+=++=+++(c )2221122222122211221.,110(())()0()/()1O I O I R C s R Z R Z R C s R C sU s U s Z Z U s Z R R U s Z R C s ===++---=∴==+2-4 解:将系统微分方程组进行初始条件为0的拉普拉斯变换得:111211211322322435435534()()() ()()()()()() ()()()()() ()()()()() ()()()()(x t r t c t X s R s C s dx t x t k x t X s s k X s dtx t k x t X s k X s x t x t k c t X s X s k C s dx t k x t dt ττ=-⇒=-=+⇒=+=⇒==-⇒=-=3544455) ()()()()() ()()1kX s X s sk dc t T c t k x t C s X s dt Ts ⇒=+=⇒=+ 根据上述方程组,画系统动态结构图如下:系统传递函数为:234122341234345()()()(1)k k k s k C sR s Ts k k k s k k k k k k k ττ+=++++2-8 结构图如图所示,利用等效变换求传递函数()/()C s R s 。

3.2 作业答案题3-10一单位反馈控制系统的开环传递函数为)1(1)(+=s s s W k试求:(1) 系统的单位阶跃响应及性能指标;,,%,μσ和s r t t (2) 输入量x r (t )= t 时,系统的输出响应;(3) 输入量x r (t) 为单位脉冲函数时,系统的输出响应。
解:(1)系统的闭环传递函数为)2()1(1)(2n nk s s s s s W ξωω+=+= 其闭环传递函数为: 11)(1)()(2++=+=s s s W s W s W k k B 与标准形式相对比,可得12=n ω 1=n ω; 12=n ξω 5.021==ξ 866.02312==-=ξωωn d 系统的单位阶跃响应为:)3866.0sin(15.11)()sin(11)(5.02πθωξξω+-=+--=--t e t y t e t y t d t n1.81%*100%*100%16.4%e e δ-==≈2.24r t s =≈s t ns 63%)5(=≈ξω;s t ns 84%)2(=≈ξωs w t df 26.72==π(5%)60.826(5%)7.26s f t u t === *(2)当输入量为t t x r =)(时,求系统的输出响应。
根据传递函数的定义,利用拉氏变换和拉氏反变换进行计算 输入量的拉氏变换为 21)(ss X r =,则 22222222222)23()21(2331)23()21(21111111111)(++-++++-+=+++-+=+++++=++=s s s s s s s s s s s s DCs s Bs A s s s s X c将上式进行拉氏反变换,等到系统的输出响应为:t e t e t t x t t c 23sin 3323cos1)(5.05.0---+-= (3) 当输入量)()(t t x r δ=时,求系统的输出响应。
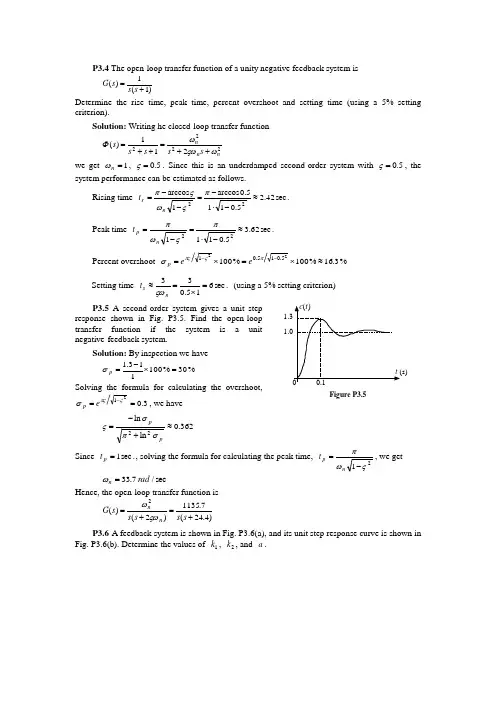
P3.4 The open-loop transfer function of a unity negative feedback system is)1(1)(+=s s s GDetermine the rise time, peak time, percent overshoot and setting time (using a 5% setting criterion).Solution: Writing he closed-loop transfer function 2222211)(nn ns s s s s ωςωωΦ++=++=we get 1=n ω, 5.0=ς. Since this is an underdamped second-order system with 5.0=ς, thesystem performance can be estimated as follows.Rising time.sec 42.25.0115.0arccos 1arccos 22≈-⋅-=--=πςωςπn r tPeak time.sec 62.35.011122≈-⋅=-=πςωπn p tPercent overshoot %3.16% 100% 100225.015.01≈⨯=⨯=--πςπςσee pSetting time.sec 615.033=⨯=≈ns t ςω(using a 5% setting criterion)P3.5 A second-order system gives a unit step response shown in Fig. P3.5. Find the open-loop transfer function if the system is a unit negative-feedback system.Solution: By inspection we have %30% 100113.1=⨯-=pσSolving the formula for calculating the overshoot,3.021==-ςπςσep, we have362.0ln ln 22≈+-=pp σπσςSince .sec 1=p t , solving the formula for calculating the peak time, 21ςωπ-=n p t , we gets e c / 7.33rad n =ωHence, the open-loop transfer function is )4.24(7.1135)2()(2+=+=s s s s s G n nςωωP3.6 A feedback system is shown in Fig. P3.6(a), and its unit step response curve is shown in Fig. P3.6(b). Determine the values of 1k , 2k , and a ..1.1Figure P3.5Solution: The transfer function between the input and output is given by2221)()(k as sk k s R s C ++=The system is stable and we have, from the response curve,21lim )(lim 122210==⋅++⋅=→∞→k sk as sk k s t c s tBy inspection we have %9% 10000.211.218.2=⨯-=pσSolving the formula for calculating the overshoot, 09.021==-ςπςσep, we have608.0ln ln 22≈+-=pp σπσςSince .sec 8.0=p t , solving the formula for calculating the peak time,21ςωπ-=n p t , we gets e c / 95.4rad n =ωThen, comparing the characteristic polynomial of the system with its standard form, we have22222n n s s k as s ωςω++=++5.2495.4222===n k ω02.695.4608.022=⨯⨯==n a ςωP3.8 For the servomechanism system shown in Fig. P3.8, determine the values of k and a that satisfy the following closed-loop system design requirements. (a) Maximum of 40% overshoot. (b) Peak time of 4s.Solution: For the closed-loop transfer function we have 22222)(nn ns sks k sk s ωςωωαΦ++=++=hence, by inspection, we getk n=2ω, αςωk n =2, and nnkωςςωα22==Taking consideration of %40% 10021=⨯=-ςπςσepresults in280.0=ς.In this case, to satisfy the requirement of peak time, 412=-=ςωπn p t , we have.s e c / 818.0r a d n =ω.2.2(a)(b)Figure P3.6Figure P3.8Hence, the values ofkandaare determined as67.02==n k ω, 68.02==nωςαP3.10 A control system is represented by the transfer function)13.04.0)(56.2(33.0)()(2+++=s ss s R s CEstimate the peak time, percent overshoot, and setting time (%5=∆), using the dominant polemethod, if it is possible.Solution: Rewriting the transfer function as]3.0)2.0)[(56.2(33.0)()(22+++=s s s R s Cwe get the poles of the system: 3.02.02 1j s ±-=,, 56.23-=s . Then, 2 1,s can be considered as a pair of dominant poles, because )Re()Re(32 1s s <<,.Method 1. After reducing to a second-order system, the transfer function becomes13.04.013.0)()(2++=s ss R s C (Note:1)()(lim==→s R s C k s Φ)which results in sec / 36.0rad n =ω and 55.0=ς. The specifications can be determined ass e c 0.42112ςωπ-=n p t , %6.12% 10021=⨯=-ςπςσeps e c 67.2011ln 12=⎪⎪⎪⎭⎫⎝⎛-=ς∆ςωns t Method 2. Taking consideration of the effect of non-dominant pole on the transient components cause by the dominant poles, we haves e c 0.8411)(231=--∠-=ςωπn p s s t%6.13% 10021313=⨯-=-ςπςσes s s ps e c 6.232ln 1313=⎪⎪⎭⎫⎝⎛-⋅=ss s t ns ∆ςωP3.13 The characteristic equations for certain systems are given below. In each case, determine the value of k so that the corresponding system is stable. It is assumed that k is positive number.(a) 02102234=++++k s s s s (b) 0504)5.0(23=++++ks s k sSolution: (a) 02102234=++++k s s s s .The system is stable if and only if⎪⎪⎩⎪⎪⎨⎧<⇒>=>9 022010102203k k D ki.e. the system is stable when 90<<k .(b) 0504)5.0(23=++++ks s k s . The system is stable if and only if⎪⎩⎪⎨⎧>-+⇒>-+⇒>+=>>+0)3.3)(8.34( 05024 041505.00 ,05.022k k k k k k D k ki.e. the system is stable when 3.3>k .P3.14 The open-loop transfer function of a negative feedback system is given by)12.001.0()(2++=s ss Ks G ςDetermine the range of K and ς in which the closed-loop system is stable. Solution: The characteristic equation is02.001.023=+++K s s s ς The system is stable if and only if⎪⎩⎪⎨⎧<⇒>-⇒>=>>ςςς20 001020 0101.02.002.0 ,02K K .ς.K D kThe required range is20>>K ς.P3.17 A unity negative feedback system has an open-loop transfer function )16)(13()(++=s s s K s GDetermine the range ofkrequired so that there are no closed-loop poles to the right of the line1-=s . Solution: The closed-loop characteristic equation is18)6)(3( 0)16)(13(=+++⇒=+++K s s s K s s si.e. 01818923=+++K s s sLetting 1~-=s s resulting in 0)1018(~3~6~ 018)5~)(2~)(1~(23=-+++⇒=+++-K s s s K s s sUsing Lienard-Chipart criterion, all closed-loop poles locate in the right-half s~-plane, i.e. to theright of the line 1-=s , if and only if⎪⎩⎪⎨⎧<⇒>-⇒>-=>⇒>-14 08.182 0311018695 ,010182K K K D K KThe required range is 91495 <<K , or56.10.56 <<KP3.18 A system has the characteristic equation0291023=+++k s s sDetermine the value of k so that the real part of complex roots is 2-, using the algebraic criterion.Solution: Substituting 2~-=s s into the characteristic equation yields 02~292~102~ 23=+-+-+-k s s s )()()( 0)26(~~4~ 23=-+++k s s sThe Routh array is established as shown.If there is a pair of complex roots with real part of 2-, then026=-ki.e. 30=k . In the case of 30=k , we have the solution of the auxiliary equation j s ±=~, i.e. j s ±-=2.3s 1 12s 4 26-k1s 0sP3.22 The open-loop transfer function of a unity negative feedback system is given by)1)(1()(21++=s T s T s Ks GDetermine the values of K , 1T , and 2T so that the steady-state error for the input, bt a t r +=)(, is less than 0ε. It is assumed that K , 1T , and 2T are positive, a and b are constants. Solution: The characteristic polynomial is K s s T T s T T s ++++=221321)()(∆Using L-C criterion, the system is stable if and only if2121212121212 0 01T T T T K T KT T T T T K T T D +<⇒>-+⇒>+=Considering that this is a 1-type system with a open-loop gain K , in the case of 2121T T T T K +<,we have 00.. εεεεεbK Kb v ss r ss ss>⇒<=+=Hence, the required range for K is21210T T T T K b+<<εP3.24 The block diagram of a control system is shown in Fig. P3.24, where )()()(s C s R s E -=. Select the values of τ and b so that the steady-state error for a ramp input is zero.Solution: Assuming that all parameters are positive, the system must be stable. Then, the error response is)()1)(1()(1)()()(21s R K s T s T b s K s C s R s E ⎥⎦⎤⎢⎣⎡++++-=-=τ)()1)(1()1()(2121221s R Ks T s T Kb s K T T sT T ⋅+++-+-++=τLetting the steady-state error for a ramp input to be zero, we get 221212210.)1)(1()1()(lim )(lim sv K s T s T Kb s K T T sT T s s sE s s r ss ⋅+++-+-++⋅==→→τεwhich results in ⎩⎨⎧=-+=-0121τK T T Kb I.e. KT T 21+=τ,Kb 1=.P3.26 The block diagram of a system is shown in Fig. P3.26. In each case, determine the steady-state error for a unit step disturbance and a unit ramp disturbance, respectively. (a) 11)(K s G =,)1()(222+=s T s K s GFigure P3.24Figure P3.26(b)ss T K s G )1()(111+=,)1()(222+=s T s K s G , 21T T >Solution: (a) In this case the system is of second-order and must be stable. The transfer function from disturbance to error is given by 212212.)1(1)(K K Ts s K G G G s d e ++-=+-=ΦThe corresponding steady-state errors are 1212.11)1(lim K s K K Ts s K s s p ss -=⋅++-⋅=→ε∞→⋅++-⋅=→2212.1)1(lim sK K Ts s K s s ass ε(b) Now, the transfer function from disturbance to error is given by )1()1()(121222.+++-=s T K K s T s sK s d e Φand the characteristic polynomial is21121232)(K K s T K K s s T s +++=∆ Using L-C criterion,0)(121211212212>-==T T K K T K K T K K Dthe system is stable. The corresponding steady-state errors are 01)1()1(lim 1212220.=⋅+++-⋅=→ss T K K s T s sK s s p ss ε121212220.11)1()1(lim K ss T K K s T s sK s s a ss -=⋅+++-⋅=→ε。
1. 静止可控整流器的缩写是()。
A. G-MB. V-MC. PWMD. SPWM。
正确答案:B 满分:6 分2. 转速闭环控制中PD代表的是()。
A. 微积分B. 比例积分C. 比例微分D. 转速闭环。
正确答案:C 满分:6 分3. 缩写术语PWM指的是()。
A. 脉冲频率调制B. 脉冲幅值调制C. 脉冲宽度调制D. 混合调制。
正确答案:C 满分:6 分4. 下面不属于直流斩波器控制方式的是()。
A. PFMB. 两点式控制C. PWMD. PAM。
正确答案:D 满分:6 分5. 下面属于静止可控整流器优点有()。
A. 单向导电性B. 对过电压和过电流敏感C. 系统的动态响应比G-M系统快D. 低速时功率因数高。
正确答案:C 满分:6 分1. 下列属于直流电动机调速方法有()。
A. 定子串电阻B. 调节电枢两端电压C. 减弱励磁磁通D. 改变定子电压正确答案:BC 满分:8 分2. 直流电机常用的可控直流电源有()。
A. 铅蓄电池B. 旋转变流机组C. 静止可控整流器D. 直线斩波器正确答案:BCD 满分:8 分3. 转速闭环系统看属于闭环可抵抗的扰动有()。
A. 运算放大器放大倍数变化B. 反馈系数变化C. 供电电压扰动D. 电机负载变化正确答案:ACD 满分:8 分4. 转速电流双闭环控制中,由于转速调节器经历了不饱和、饱和、退饱和三个阶段,分别对应下面中的几个阶段?()。
A. 电流下降B. 转速调节阶段C. 电流上升阶段D. 恒流升速阶段正确答案:BCD 满分:8 分5. 对于调速系统的转速控制要求有()。
A. 调速B. 调速范围C. 加减速D. 稳速正确答案:ACD 满分:8 分1. 转速单闭环控制,采用PI控制可以实现无静差。
A. 错误B. 正确正确答案:B 满分:6 分2. 在随动系统中,对快速性要求不高,所以常用PI调节器。
A. 错误B. 正确正确答案:A 满分:6 分3. 在闭环调速系统中,电流正反馈控制方式比转速单闭环控制效果好。

2023年化工自动化控制仪表高频考点训练2卷合壹(带答案)(图片大小可自由调整)全文为Word可编辑,若为PDF皆为盗版,请谨慎购买!第1套一.全能考点(共100题)1.【单选题】速度式流量测量仪表是把流体在管道内已知截面流过的()变换成压差、位移、转速、冲力、频率等对应信号来间接测量流量的。
A、距离B、体积C、流速参考答案:C2.【判断题】放射性液位计由施工单位安装、调试。
参考答案:×3.【单选题】提高齿轮安装精度,主要是提高安装时的()精度,对减少齿轮运行中的噪音有很大作用。
A、位置度B、同轴度C、平行度D、直线度参考答案:B4.【单选题】离心泵的轴温情况应()检查。
A、每天进行B、每次巡检进行C、每班进行参考答案:B5.【多选题】在多相燃烧中,根据燃烧条件的不同,可以将多相燃烧区域划分为()区域。
A、动力燃烧区域B、扩散燃烧区域C、过渡燃烧区域D、固体燃烧区域参考答案:ABC6.【单选题】工业雷达液位计的分辨率在()mm以内,计量雷达液位计的分辨率在()mm以内。
A、10~20,1B、1~10,1C、5~10,1D、1~5,1参考答案:A7.【判断题】PLC存储器中的程序,断电后必须用电池保存。
参考答案:×8.【单选题】配合机械作业的清底、平地、修坡等人员,()在机械回转半径以外工作。
A、应B、可以C、必须D、不可以参考答案:C9.【判断题】对于气动阀门定位器如果没有输出信号则通常是喷嘴挡板堵。
参考答案:√10.【判断题】液体沸腾转化为气体的温度称为沸点。
参考答案:√11.【判断题】用人单位可以实行计件工资,而不执行最低工资制度。
参考答案:×12.【判断题】()自动变速器液压油换油,可以常温下放油。
参考答案:×13.【判断题】不同厂商的智能变送器其传感元件、结构原理,通信协议不同的。
参考答案:√14.【单选题】椭圆齿轮流量计是()式流量计。
A、速度B、质量C、容积参考答案:C15.【单选题】帕斯卡Pa的定义:1()的力均匀而垂直作用在1平方米(㎡)单位面积上所产生的压力就是1帕斯卡(Pa)。
《自动控制原理》MATLAB分析与设计仿真实验报告院系:电信学院班级:自动化3班姓名: zh学号: ********时间:2015 年 12 月 31 日电气工程与信息工程学院第三章 线性系统的时域分析法3-5设单位反馈系统的开环传递函数为)6.0(14.0)(++=s s s s G 。
试求:1)系统在单位阶跃输入下的动态性能。
2)并与忽略闭环零点的系统动态性能进行比较,分析仿真结果。
解:画SIMULINK 图:没有忽略闭环零点和忽略闭环零点的对比系统接线图曲线和表格:没有忽略闭环零点忽略闭环零点由图像可以算出:Ts δ % Tp 没有忽略闭环零点7.74s18%3.63s忽略闭环零点8.08s 16.3% 3.16s分析与结论:从系统曲线图中可以看见当没有忽略闭环零点时,调节速度快但是超调量大。
从系统曲线图中可以看见忽略闭环零点时,调节速度慢但是超调量小。
我们可以用程序做的图中可以直接读出数据(如:调节时间、超调量)。
但是,SIMULINK做的图中是不可以直接读出,只能看到它的大致走向。
3-9设控制系统如图所示,要求:取τ1=0,τ2=0.1,计算测速反馈校正系统的超调量、调节时间和速度误差;取τ1=0.1,τ2=0,计算比例-微分校正系统的超调量、调节时间和速度误差。
解:画SIMULINK图:τ1=0,τ2=0.1τ1=0.1,τ2=0不加比例微分和微分反馈和以上环节进行比较曲线和表格:1234567891000.20.40.60.811.21.41.6t1=0,t2=0t1=0.1,t2=0t1=0,t2=0.1系统 TsTp 峰值 δ %原函数 7.32 1.01 1.6 60.5 测速反馈3.541.051.3535.1比例微分 3.44 0.94 1.37 37.1分析与结论:总结:测速反馈控制与比例-微分控制都可以改善二阶系统的动态特性,但是他们也有各自的特点。
比例-微分控制对系统的开环增益和自然频率均无影响,测速反馈控制虽然不影响自然频率,但是会降低开环增益。
化工自动化控制仪表上岗证题目1、【单选题】下面关于串级控制回路的描述中正确的是0。
(B)A、主、副控制器串接工作,主控制器的输出直接操纵控制阀B、主、副控制器串接工作的双闭环负反馈控制系统C、主、副控制器串接工作,实现对副变量的定值控制2、【单选题】下面是关于绝压的叙述,其中正确的是()。
(B)A、低于绝对零压的部分叫绝压B、高出绝对零压的部分叫绝压C、高出大气压力的部分叫绝压3、【单选题】不能够进行反正装导向的调节阀有()。
(A)A、笼式阀B、直通单座调节阀C、直通双座调节阀4、【单选题】为了保证弹性元件能在弹性变形的安全范围内可靠地工作,在选择压力表量程时,必须考虑留有足够的0。
(B)A、测量精度B、余地C、测量范围5、【单选题】先整定副控制器,后整定主控制器的方法,是串级控制回路控制器的参数整定的0。
(A)A、两步整定法B、一步整定法C、三步整定法6、【单选题】关于选择控制系统的描述错误的是()。
(C)A、有两个变送器B、有两个控制器C、有两个选择器7、【单选题】关于隔膜式调节阀,下述说法不正确的是()。
(A)A、适用于高温、高压场合B、适用于腐蚀性介质场合C、流量特性近似快开特性8、【单选题】凡用两个控制器串联工作,主控制器的输出作为副控制器的给定值,由副控制器输出去操纵阀门(为了稳定一个工艺指标),结构上形成了两个闭合回路,这样的控制系统称为()。
(B)A、均匀控制系统B、串级控制系统C、分程控制系统9、【单选题】分程控制回路的两个控制阀的流量系数分别为C1=4,C2=100,可调范围分别为RI=R2=30;分程后的可调范围为R=()。
(C)A、0.134B、3.3C、77610、【单选题】国际单位制的压力单位即法定计量单位是0(A)A、帕斯卡(帕)B、牛顿C、公斤/(厘米)11、【单选题】按照《特种设备安全监察条例》,特种设备包括其安全附件、安全保护装置和()设施。
(B)A、自控B、与安全保护装置相关的C、相连D、相邻12、【单选题】《锅炉安全技术监察规程》规定:锅炉的使用单位,在锅炉投入使用前或者投入使用后日内,应当按照要求到设区的市的质量技术监督部门逐台办理登记手续(C)A、10B、20C、30D、4013、【单选题】按管道的油漆标志,饱和蒸汽管道涂色为()。
受限空间作业考试试题及答案一、选择题1、《中华人民共和国安全生产法》规定,生产经营单位与从业人员订立的劳动合同,应当载明有关保障从业人员()防止职业危害,以及为从业人员办理工伤保险事项。
A、福利待遇B、劳动安全C、教育和培训D、劳动权利正确答案B2、根据北京市近几年的要求,以下哪项不是有限空间作业现场应设置的设施()。
A、安全警示标志B、安全告知牌C、信息公示牌D、风险评估单正确答案D3、气体检测报警仪更换传感器后应先()。
A、活化B、校准C、调零D、使用正确答案A4、下列不属于隔绝式呼吸防护用品的是()。
A、防毒面具B、紧急逃生呼吸器^自吸式长管呼吸器D、正压式空气呼吸器正确答案A5、以下情况不属于有害环境的是()。
A、甲烷浓度超过爆炸下限的10%B、一氧化碳浓度为3mg/m3C、氧含量低于19.5%D、硫化氢浓度为10mg/m3正确答案B6、下列不属于防坠落用具的是()。
A、安全带B、速差式自控器C、安全帽D、安全绳正确答案C7、一般情况下,检测报警仪硫化氢的报警缺省值为()。
A、5mg/m3B、8mg/m3D、15mg/m3正确答案C 8、下列哪些措施不是有限空间危害通用控制措施()。
A、分析检测B、隔离C、清洗和净化D、通风正确答案A9、用人单位应当建立、健全()对本单位产生的职业病危害承担责任。
A、安全生产责任制B、职业病防治责任制C、消防安全责任制D、交通安全责任制正确答案B10、作业人员进行检查.维护的排水管道时,要求其管径不得小于()。
A、0.7mB、0.8mC、0.9mD、1m正确答案B11、在有限空间外进行气体检测应选择()气体检测报警仪。
A、泵吸式B、扩散式C、两者均可D、两者均不可正确答案A12、不属于有限空间作业前隔离的方式有()。
A、关闭管道阀门,并加设盲板B、封堵隧道的通风口C、使用充气管塞封堵污水管线D、切断反应釜搅拌器的电源正确答案B13、最高容许浓度的缩略语是()。
内容为三阶系统,三阶系统的方框图和模拟电路如图1-2所示。
图1-2 三阶系统图中,21=K ,RW K +⨯⨯=36210100101,363101i R K ⨯=,321K K K K =,161101f C T ⨯⨯=,262101,f C T ⨯⨯=,363101f C T ⨯⨯=。
实验一:求取系统的临界开环比例系数KC实验二:系统的开环比例系数K 对稳定性的影响。
在对此问题的学习上,我们将分别用计算理论值、matlab 编程仿真、matlab 中simulink 仿真、multism 仿真四种方法进行研究。
方法一:理论值计算实验一:求取系统的临界开环比例系数KC根据三阶系统的方框图和模拟电路,将Cf1=Cf2=Cf3=0.47u ;Ri3=1M 代入,可以得到开环传递函数为:1231232()111210.4710.4710.471O K K K G s T s T s T s K s s s =+++=+++由此可求出系统的闭环传递函数为12312312312322232111()1111210.4710.4710.471 2110.4710.4710.4712 (0.471)2C K K K T s T s T s G s K K K T s T s T s K s s s K s s s K s K +++=+++++++=++++=++为求取临界开环比例系数,根据劳斯判据可以得到3322233222202 0.4730.4730.47120. is: 0.47 30.47 30.47 1+2 28 28s s s K The array of coefficients s s K s K s K +⨯+⨯++=⨯⨯--由劳斯判据可知,当第一列有零的时候说明系统不稳定,存在虚轴或复平面右半平面的点;当有全零行的时候,有右半平面和虚轴上的点。
同时,第一列中如果位于零上面的系数符号与位于零下面的系数符号相同,则表明有一对虚根存在。
《自控理论》平时作业一、简答题(总分100分)1. 已知系统结构图如下图所示,要求通过简化(结构图化简或信流图)求出系统的传递函数Y(S)/R(S)。
解:Y(S)/R(S)=G1G2G3/1-G1G2G3H1+G2G3H2+G1G2G32. 设系统的开环幅相频率特性如下图所示,试判断系统的稳定性。
图中p表示系统开环极点在右半面上的数目。
若闭环系统不稳定,试计算在右半s面的闭环极点数.。
解:因为开环幅相频率特性图没过点(-1,0j),所以系统稳定。
极点个数为(n-p)个3.推导下图所示的一个负反馈连接的系统其等效传递函数。
解:G(S)=Y(S)/E(S)H(S)=B(S)/Y(S)传递函数G B(S)=Y(S)/R(S)E(S)=R(S)-Y(S)H(S)Y(S)=G(S)-G(S)Y(S)H(S)故G B(S)=G(S)/1+G(S)H(S)4.已知系统开环传递函数为,试画出系统的对数幅频特性曲线图。
解:四川大学简介四川大学是教育部直属全国重点大学,由原四川大学、原成都科技大学、原华西医科大学三所全国重点大学于1994年4月和2000年9月两次“强强合并”组建而成。
是国家布局在中国西部的高水平研究型综合大学。
经教育部批准,四川大学被列入国家2000年正式启动的“现代远程教育”首批试点院校,四川大学网络教育学院依托四川大学深厚的文化底蕴,集中组织校内各学科丰富的教学资源和强大的师资力量,对其进行整合,以适应远程教学的需要。
以科学、严谨的态度采用现代远程教学手段和教学模式,经过十二年的建设,形成了较为完整的教学体系和教学保障体系。
第一章:入学与注册1)按四川大学现代远程教育招生规定录取的新生,必须持《四川大学录取通知书》及有效身份证件,在规定的日期内到所属学习中心办理入学手续。
因故不能按期报到的,必须事先附有关证明,以书面形式向所属学习中心请假,无故逾期两周不办理入学手续者,除因不可抗拒等正当事由以外,视为自动放弃入学资格。
2020年有限空间作业考试588题【含答案】
一、单选题
1.二氧化碳.氮气.乙烷.氢气.氦气等本身无毒或毒性甚微,但吸入这类气体过多时,也都会对人体产生损害,主要原因是()。
A.缺氧
B.燃爆
C.急性中毒
D.过氧化
正确答案.A
2.生产经营单位特种作业人员必须按照国家有关规定经专门的安全生产教育培训,取得(),方可上岗作业。
A.危险作业审批表
B.以上均正确
C.危险作业告知牌
D.特种作业操作资格证书
正确答案.D
3.()对未经许可靠近或者试图进入有限空间者予以警告并劝离,如果未经许可者进入有限空间,应及时通知作业人员和作业负责人。
A.作业负责人
B.作业者
C.安全检查人员
D.监护者
正确答案.D
4.()遵守有限空间作业安全操作规程,正确使用有限空间作业安全防护设备与个人防护用品,服从现场负责人安全管理,接受现场安全监督。
A.气体检测人员
B.作业负责人
C.监护者
D.作业者
正确答案.D
5.下列选项中不是按气体检测种类对气体检测报警仪进行分类的是()。
A.有毒气体检测报警仪。
2020 年有限空间作业考试588 题【含答案】一、单选题1. 《中华人民共和国安全生产法》规定,生产经营单位必须建立.健全安全生产责任制度和安全生产规章制度,改善安全生产条件,推进(),提高安全生产水平。
A.安全生产标准化建设B.企业安全文化建设C.事故预防体系建设D.隐患排查治理体系建设正确答案.A2. 长管呼吸器分为()。
A.自吸式长管呼吸B. 高压送风式长管呼吸器C. 过滤式长管呼吸D.送风式长管呼吸器正确答案.C3. 进入可能存在可燃性物质的有限空间作业时,作业人员必须使用()。
A.防水工具B.一般工具C.防火工具D.防爆工具正确答案.D4. 检查井内水泵运行时严禁人员下井,防止()。
A.中毒B. 窒息C. 坠落摔伤D.触电正确答案.D5. 下列哪些措施不是有限空间危害通用控制措施()。
A.隔离B. 通风C. 分析检测D.清洗和净化正确答案.C6. 作业者进入 3 级环境,建议选择的呼吸防护用品()。
A.送风式长管呼吸器B. 防毒面具C. 正压式空气呼吸器D.紧急逃生呼吸器正确答案.D7. 以下哪些条件不属于 1 级作业环境判定标准()。
A.氧含量小于19.5%或大于23.5%B.可燃性气体.蒸气浓度大于爆炸下限(LEL)的10%C.氧含量为19.5%~23.5%D.有毒有害气体.蒸气浓度大于GBZ 2.1规定的限值正确答案.C8. 有限空间分为密闭设备.地上有限空间和()。
A.地下有限空间B.受限空间C.密闭空间D.限值空间正确答案.A9. 《中华人民共和国安全生产法》规定,生产经营单位的特种作业人员必须按照国家有关规定,经专门的安全作业培训,取得(),方可上岗作业。
A.特种作业操作资格证书B.相应资格C.职业技能等级证书D.特种作业操作证书正确答案.B10. 对有限空间作业场所进行()是有效降低其内部有毒有害气体浓度,减轻作业危害的重要手段。
A.设置警示区域B.隔离管道C.气体检测D.通风换气正确答案.D11. 生产经营单位在有限空间作业现场应配备的( )设备,一旦发生事故可以尽可能减少人员伤亡。
第一章习题及答案1-1 根据题1-1图所示的电动机速度控制系统工作原理图(1) 将a ,b 与c ,d 用线连接成负反馈状态;(2) 画出系统方框图。
解 (1)负反馈连接方式为:d a ↔,c b ↔;(2)系统方框图如图解1-1 所示。
1-2 题1-2图是仓库大门自动控制系统原理示意图。
试说明系统自动控制大门开闭的工作原理,并画出系统方框图。
题1-2图 仓库大门自动开闭控制系统解 当合上开门开关时,电桥会测量出开门位置与大门实际位置间对应的偏差电压,偏差电压经放大器放大后,驱动伺服电动机带动绞盘转动,将大门向上提起。
与此同时,和大门连在一起的电刷也向上移动,直到桥式测量电路达到平衡,电动机停止转动,大门达到开启位置。
反之,当合上关门开关时,电动机带动绞盘使大门关闭,从而可以实现大门远距离开闭自动控制。
系统方框图如图解1-2所示。
1-3 题1-3图为工业炉温自动控制系统的工作原理图。
分析系统的工作原理,指出被控对象、被控量和给定量,画出系统方框图。
题1-3图 炉温自动控制系统原理图解 加热炉采用电加热方式运行,加热器所产生的热量与调压器电压的平方成正比,增高,炉温就上升,的高低由调压器滑动触点的位置所控制,该触点由可逆转的直流电动机驱动。
炉子的实际温度用热电偶测量,输出电压。
作为系统的反馈电压与给定电压进行比较,得出偏差电压,经电压放大器、功率放大器放大成后,作为控制电动机的电枢电压。
c u c u c u f u f u r u e u a u 在正常情况下,炉温等于某个期望值T °C ,热电偶的输出电压正好等于给定电压。
此时,f u r u 0=−=f r e u u u ,故01==a u u ,可逆电动机不转动,调压器的滑动触点停留在某个合适的位置上,使保持一定的数值。
这时,炉子散失的热量正好等于从加热器吸取的热量,形成稳定的热平衡状态,温度保持恒定。
c u 当炉膛温度T °C 由于某种原因突然下降(例如炉门打开造成的热量流失),则出现以下的控制过程:控制的结果是使炉膛温度回升,直至°C 的实际值等于期望值为止。
T系统中,加热炉是被控对象,炉温是被控量,给定量是由给定电位器设定的电压(表征炉温的希望值)。
系统方框图见图解1-3。
r u1-4 题1-4图是控制导弹发射架方位的电位器式随动系统原理图。
图中电位器、并联后跨接到同一电源的两端,其滑臂分别与输入轴和输出轴相联结,组成方位角的给定元件和测量反馈元件。
输入轴由手轮操纵;输出轴则由直流电动机经减速后带动,电动机采用电枢控制的方式工作。
1P 2P 0E 试分析系统的工作原理,指出系统的被控对象、被控量和给定量,画出系统的方框图。
题1-4图 导弹发射架方位角控制系统原理图解 当导弹发射架的方位角与输入轴方位角一致时,系统处于相对静止状态。
当摇动手轮使电位器的滑臂转过一个输入角1P i θ的瞬间,由于输出轴的转角i o θθ≠,于是出现一个误差角o i e θθθ−=,该误差角通过电位器、转换成偏差电压,经放大后驱动电动机转动,在驱动导弹发射架转动的同时,通过输出轴带动电位器的滑臂转过一定的角度1P 2P o i e u u u −=e u 2P o θ,直至i o θθ=时,o i u u =,偏差电压0=e u ,电动机停止转动。
这时,导弹发射架停留在相应的方位角上。
只要o i θθ≠,偏差就会产生调节作用,控制的结果是消除偏差e θ,使输出量o θ严格地跟随输入量i θ的变化而变化。
系统方框图如图解1-4所示。
1-5采用离心调速器的蒸汽机转速控制系统如题1-5图所示。
其工作原理是:当蒸汽机带动负载转动的同时,通过圆锥齿轮带动一对飞锤作水平旋转。
飞锤通过铰链可带动套筒上下滑动,套筒内装有平衡弹簧,套筒上下滑动时可拨动杠杆,杠杆另一端通过连杆调节供汽阀门的开度。
在蒸汽机正常运行时,飞锤旋转所产生的离心力与弹簧的反弹力相平衡,套筒保持某个高度,使阀门处于一个平衡位置。
如果由于负载增大使蒸汽机转速ω下降,则飞锤因离心力减小而使套筒向下滑动,并通过杠杆增大供汽阀门的开度,从而使蒸汽机的转速回升。
同理,如果由于负载减小使蒸汽机的转速ω增加,则飞锤因离心力增加而使套筒上滑,并通过杠杆减小供汽阀门的开度,迫使蒸汽机转速回落。
这样,离心调速器就能自动地抵制负载变化对转速的影响,使蒸汽机的转速ω保持在某个期望值附近。
指出系统中的被控对象、被控量和给定量,画出系统的方框图。
题1-5图蒸汽机转速自动控制系统解在本系统中,蒸汽机是被控对象,蒸汽机的转速ω是被控量,给定量是设定的蒸汽机希望转速。
离心调速器感受转速大小并转换成套筒的位移量,经杠杆传调节供汽阀门,控制蒸汽机的转速,从而构成闭环控制系统。
系统方框图如图解1-5所示。
1-6 摄像机角位置自动跟踪系统如题1-6图所示。
当光点显示器对准某个方向时,摄像机会自动跟踪并对准这个方向。
试分析系统的工作原理,指出被控对象、被控量及给定量,画出系统方框图。
题1-6图 摄像机角位置随动系统原理图解 控制系统的任务是使摄像机自动跟踪光点显示器指示的方向。
当摄像机方向角与光点显示器指示的方向一致时,12θθ=,自整角机输出,交流放大器输出电压0=e 0=u ,电动机静止,摄像机保持原来的协调方向。
当光点显示器转过一个角度,12θθ≠时,自整角机输出与失谐角21θθθ−=Δ成比例的电压信号(其大小、极性反映了失谐角的幅值和方向),经电位器后变成,经放大器放大后驱动伺服电动机旋转,并通过减速器带动摄像机跟踪光点显示器的指向,使偏差减小,直到摄像机与光点显示器指向重新达到一致时为止。
测速发电机测量电动机转速,进行速度反馈,用以改善系统性能。
e系统中,摄像机是被控对象,摄像机的方向角2θ是被控量,给定量是光点显示器指示的方向角1θ。
系统方框图如图解1-6所示。
1-7 题1-7图(a),(b)所示的系统均为电压调节系统。
假设空载时两系统发电机端电压均为110V ,试问带上负载后,图(a),(b)中哪个能保持110V 不变,哪个电压会低于110V ,为什么?题1-7图 电压调节系统工作原理图解 带上负载后,开始由于负载的影响,(a)与(b)的端电压都要下降,但图(a)中所示系统能恢复到110伏而图(b)系统却不能。
理由如下:图(a)系统,当u 低于给定电压时,其偏差电压经放大器K 放大后,驱动电机D 转动,经减速器带动电刷,使发电机F 的激磁电流增大,发电机的输出电压会升高,从而使偏差电压减小,直至偏差电压为零时,电机才停止转动。
因此,图(a)系统能保持110伏不变。
j I 图(b)系统,当低于给定电压时,其偏差电压经放大器u K 后,直接使发电机激磁电流增大,提高发电机的端电压,使发电机G 的端电压回升,偏差电压减小,但不可能等于零,因为当偏差电压为 0时,=0,发电机就不能工作。
即图(b)所示系统的稳态电压会低于110伏。
f i 1-8 题1-8图为水温控制系统示意图。
冷水在热交换器中由通入的蒸汽加热,从而得到一定温度的热水。
冷水流量变化用流量计测量。
试绘制系统方块图,并说明为了保持热水温度为期望值,系统是如何工作的?系统的被控对象和控制装置各是什么?解 工作原理:温度传感器不断测量交换器出口处的实际水温,并在温度控制器中与给定温度相比较,若低于给定温度,其偏差值使蒸汽阀门开大,进入热交换器的蒸汽量加大,热水温度升高,直至偏差为零。
如果由于某种原因,冷水流量加大,则流量值由流量计测得,通过温度控制器,开大阀门,使蒸汽量增加,提前进行控制,实现按冷水流量进行顺馈补偿,保证热交换器出口的水温不发生大的波动。
其中,热交换器是被控对象,实际热水温度为被控量,给定量(希望温度)在控制器中设定;冷水流量是干扰量。
题1-8图水温控制系统原理图系统方块图如图解1-8所示。
这是一个按干扰补偿的复合控制系统。
1-9许多机器,像车床、铣床和磨床,都配有跟随器,用来复现模板的外形。
题1-9图就是这样一种跟随系统的原理图。
在此系统中,刀具能在原料上复制模板的外形。
试说明其工作原理,画出系统方框图。
解模板与原料同时固定在工作台上。
X、Y轴直流伺服马达接受控制器的指令,按输入命令带动工作台做X、Y方向运动。
模板随工作台移动时,触针会在模板表面滑动,跟随刀具中的位移传感器将触针感应到的反映模板表面形状的位移信号送到跟随控制器,控制器的输出驱动Z轴直流伺服马达带动切削刀具连同刀具架跟随触针运动,当刀具位置与触针位置一致时,两者位置偏差为零,Z轴伺服马达停止。
系统中,刀具是被控对象,刀具位置是被控量,给定量是由模板确定的触针位置。
系统方框图如图解1-9所示。
最终原料被切割加工成模板的形状。
1-10题1-10图(a),(b)所示均为调速系统。
(1) 分别画出图(a)、图(b)对应系统的方框图。
给出图(a)正确的反馈连线方式。
(2) 在恒值输入条件下,图(a)、图(b)中哪个是有差系统,哪个是无差系统,说明其道理。
题1-10图调速系统工作原理图解 (1)系统方框图如图解1-10所示。
题1-10图(a)正确的反馈连接方式如题1-10图(a)中虚线所示。
(2) 题1-10图(a)的系统是有差系统,题1-10图(b)的系统是无差系统。
题1-10图(a)中,当给定恒值电压信号,系统运行达到稳态时,电动机转速的恒定是以发电机提供恒定电压为条件,对应发电机激磁绕组中电流一定是恒定值。
这意味着放大器前端电压是非零的常值。
因此,常值偏差电压存在是系统稳定工作的前提,故系统有差。
题1-10图(b)中,给定恒定电压,电动机达到稳定转速时,对应发电机激磁绕组中的励磁电流恒定,这意味着执行电动机处于停转状态,放大器前端电压必然为0,故系统无差。
1-11题1-11图为谷物湿度控制系统示意图。
在谷物磨粉的生产过程中,有一个出粉最多的湿度,因此磨粉之前要给谷物加水以得到给定的湿度。
图中,谷物用传送装置按一定流量通过加水点,加水量由自动阀门控制。
加水过程中,谷物流量、加水前谷物湿度以及水压都是对谷物湿度控制的扰动作用。
为了提高控制精度,系统中采用了谷物湿度的顺馈控制,试画出系统方块图。
题1-11图谷物湿度控制系统示意图解系统中,传送装置是被控对象;输出谷物湿度是被控量;希望的谷物湿度是给定量。
系统方框图如图解1-11 所示。
这是一个按干扰补偿的复合控制系统。