自动控制原理C作业(第二章)答案
- 格式:doc
- 大小:987.50 KB
- 文档页数:20
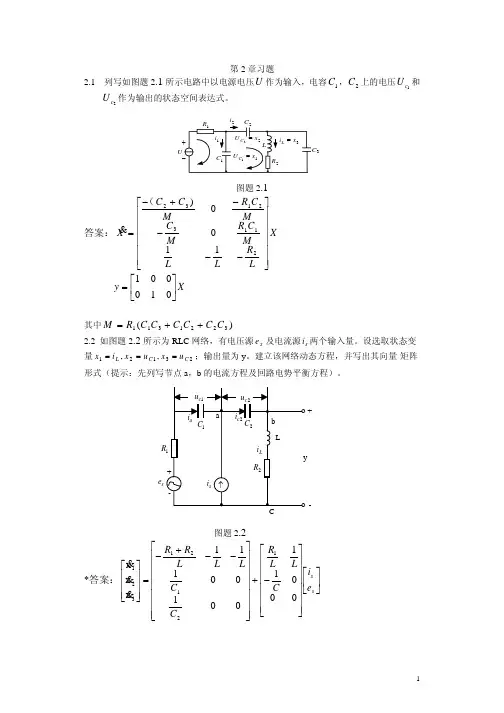
第2章习题2.1 列写如图题2.1所示电路中以电源电压U 作为输入,电容1C ,2C 上的电压1c U 和2c U 作为输出的状态空间表达式。
图题2.1答案:X L R LL M C R M C M C R M C C X ⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡−−−−+−=211321321100)(& X y ⎥⎦⎤⎢⎣⎡=010001其中)(3221311C C C C C C R M ++=2.2 如图题2.2所示为RLC 网络,有电压源s e 及电流源s i 两个输入量。
设选取状态变量23121,,C C L u x u x i x ===;输出量为y 。
建立该网络动态方程,并写出其向量-矩阵形式(提示:先列写节点a ,b 的电流方程及回路电势平衡方程)。
图题2.2*答案:⎥⎦⎤⎢⎣⎡⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡−+⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎣⎡−−+−=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡s s e i C L L R C C L L L RR 0001100100111x x x 12121321&&&U 3+-se[]111−−−=R y ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡321x x x +[]⎥⎦⎤⎢⎣⎡s s e i R 11 2.3 列写图题2.3所示RLC 网络的微分方程。
其中,r u 为输入变量,c u 为输出变量图题2.3答案:r c cc u u dt du RC dtu d LC =++22 2.4 列写图题2.4所示RLC 网络的微分方程,其中r u 为输入变量,c u 为输出变量。
图题2.4答案:r c cc uu dt du R L dtu d LC =++22 2.5 图题2.5所示为一弹簧—质量—阻尼器系统,列写外力)(t F 与质量块位移)(t y 之间)(t图题2.5答案:)()()()(22t f t ky dt t dy f dtt y d m =++ 2.6 列写图题2.6所示电路的微分方程,并确定系统的传递函数,其中r u 为输入变量,cu 为输出变量。
第一章绪论1-1 试比较开环控制系统和闭环控制系统的优弊端.解答: 1 开环系统(1)长处 :构造简单,成本低,工作稳固。
用于系统输入信号及扰动作用能早先知道时,可获得满意的成效。
(2)弊端:不可以自动调理被控量的偏差。
所以系统元器件参数变化,外来未知扰动存在时,控制精度差。
2闭环系统⑴长处:不论因为扰乱或因为系统自己构造参数变化所惹起的被控量偏离给定值,都会产生控制作用去消除此偏差,所以控制精度较高。
它是一种按偏差调理的控制系统。
在实质中应用宽泛。
⑵弊端:主要弊端是被控量可能出现颠簸,严重时系统没法工作。
1-2什么叫反应?为何闭环控制系统常采纳负反应?试举例说明之。
解答:将系统输出信号引回输入端并对系统产生控制作用的控制方式叫反应。
闭环控制系统常采纳负反应。
由1-1 中的描绘的闭环系统的长处所证明。
比如,一个温度控制系统经过热电阻(或热电偶)检测出目前炉子的温度,再与温度值对比较,去控制加热系统,以达到设定值。
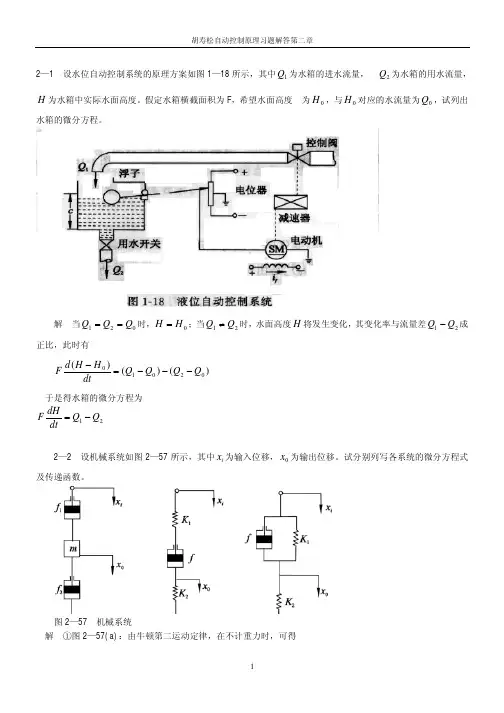
1-3试判断以下微分方程所描绘的系统属于何种种类(线性,非线性,定常,时变)?2 d 2 y(t)3 dy(t ) 4y(t ) 5 du (t ) 6u(t )(1)dt 2 dt dt(2) y(t ) 2 u(t)(3)t dy(t) 2 y(t) 4 du(t) u(t ) dt dtdy (t )u(t )sin t2 y(t )(4)dtd 2 y(t)y(t )dy (t ) (5)dt 2 2 y(t ) 3u(t )dt(6)dy (t ) y 2 (t) 2u(t ) dty(t ) 2u(t ) 3du (t )5 u(t) dt(7)dt解答: (1)线性定常(2)非线性定常 (3)线性时变(4)线性时变(5)非线性定常(6)非线性定常(7)线性定常1-4 如图 1-4 是水位自动控制系统的表示图, 图中 Q1,Q2 分别为进水流量和出水流量。
控制的目的是保持水位为必定的高度。
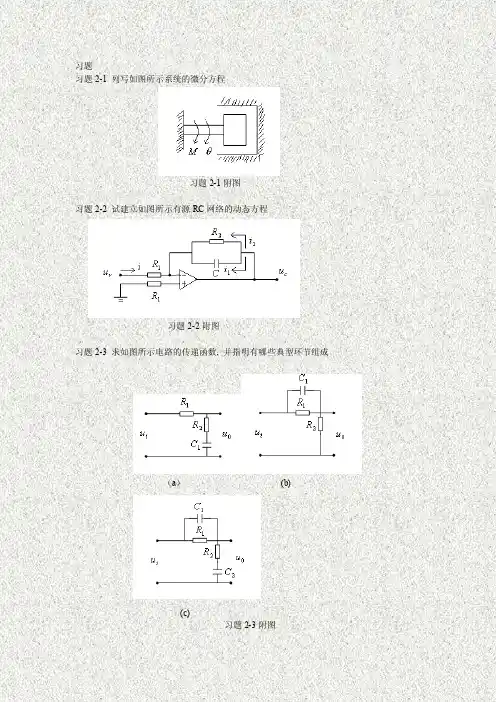
习题习题2-1 列写如图所示系统的微分方程习题2-1附图习题2-2 试建立如图所示有源RC网络的动态方程习题2-2附图习题2-3 求如图所示电路的传递函数, 并指明有哪些典型环节组成(a)(b)(c)习题2-3附图习题2-4 简化如图所示方块图, 并求出系统传递函数习题2-4附图习题2-5 绘制如下方块图的等效信号流图, 并求传递函数图(a)图(b)习题2-5附图习题2-6 系统微分方程组如下, 试建立对应信号流图, 并求传递函数。
),(d )(d )(),(d )(d ),()()()(),()(),(d )(d )(),()()(54435553422311121t y tt y T t x k t x k tt x t y k t x t x t x t x k t x t x k tt x t x t y t r t x +==--==+=-=τ习题2-7 利用梅逊公式直接求传递函数。
习题2-7附图习题2-8 求如图所示闭环传递函数, 并求(b)中)(s H x 的表达式, 使其与(a)等效。
图(a )图(b)习题2-8附图习题2-9 求如下各图的传递函数(a)(b)(c)习题2-9附图习题2-10 已知某些系统信号流图如图所示, 求对应方块图(a )(b)(c)(d)习题2-10附图习题答案习题2-1答案:解:设外加转矩M 为输入量,转角θ为输出量,转动惯量J 代表惯性负载,根据牛顿定律可得:θθθ1122d d d d k t f M tJ --=式中,1,1,k f 分别为粘性阻尼系数和扭转弹性系数,整理得:M k t f tJ =++θθθ1122d d d d习题2-2答案:解: 设r u 为输入量,c u 为输出量,,,,21i i i 为中间变量,根据运算放大器原理可得:1221d d R u i R u i t u c i r c c ===消去中间变量可得: r c c u R Ru t u C R 122d d -=+ 习题2-3答案: 解: (a)11111111221212211121121120++=+++=+++=+++=Ts Ts s R R R C R s C R R sC R sC R sC sC R R sC R u u i β其中:221121,R R R C R T +==β, 一阶微分环节,惯性环节.(b)21121212111221122011//1R R s C R R R s C R R R sC R R R sC R R u u i+++=++=+= 11111111212121221121111++=+∙++∙+=+++=Ts Ts s C R R R R s C R R R R R R s C R R s C R αα其中 α=+=21211,R R R T C R , 一阶微分环节,惯性环节.(c)s C R s C R s C R s C R s C R sC R R sC sC R u u i 21221122112211220)1)(1()1)(1(1//11+++++=+++= 由微分环节,二阶振荡环节组成。
自动控制原理作业题(后附答案)-标准化文件发布号:(9456-EUATWK-MWUB-WUNN-INNUL-DDQTY-KII自动控制原理作业题第一章基本概念一、简答题1 简述自动控制的基本概念2 简述自动控制系统的基本组成3 简述控制系统的基本控制过程4 简述自动控制系统的基本分类5 试比较开环控制和闭环控制的特点6 简述自动控制系统的性能评价指标二、分析计算题1 液位自动控制系统如图所示。
试分析该系统工作原理,画出系统原理框图,指出被控对象、被控参量和控制量2 发动机电压调节系统如图所示,试分析其工作原理,画出系统原理框图,指出其特点。
3液面控制系统如图所示。
试分析该系统的工作原理,指出系统中的干扰量、被控制量及被控制对象,并画出系统的方框图。
4控制系统如图所示。
简述该系统的工作原理,说明该系统的给定值、被控制量和干扰量,并画出该系统的方块图。
图1-7发电机-电动机调速系统操纵电位计发电机伺服电机减速器负载Θr给定值Ur 前置放大器功放执行元件被控量Wm这是一个开环控制的例子+E-EUr操纵电位计R1R2R3R4放大器直流发电机伺服电机Wd Wm发电机-电动机调速系统减速器负载5火炮随动控制系统如图所示。
简述该系统的工作原理,并画出该系统的原理框图。
第二章 线性控制系统的数学模型一、简答题1 简述建立控制系统数学模型的方法及其数学表示形式2 简述建立微分方程的步骤3 简述传递函数的基本概念及其特点4 给出组成控制系统典型基本环节二、分析计算题1 有源电网络如图所示,输入量为)(1t u ,输出量为)(2t u ,试确定该电网络的传递函数2 电枢控制式直流电动机原理图如图所示,输入量为)(1t e ,输出量为)(t o θ,试确定其微分方程。
图中,电动机电枢输入电压;电动机输出转角;电枢绕组的电阻;电枢绕组的电感;流过电枢绕组的电流;电动机感应电势;电动机转矩;电动机及负载这和到电动机轴上的转动惯量;电动机及负载这和到电动机轴上的粘性摩擦系数。

⾃动控制原理第⼆章课后习题答案(免费)⾃动控制原理第⼆章课后习题答案(免费)离散系统作业注明:*为选做题2-1 试求下列函数的Z 变换(1)()E z L =();n e t a = 解:01()[()]1k k k z E z L e t a z z z aa∞-=====--∑ (2) ();at e t e -= 解:12211()[()][]1...1atakT k aT aT aTaT k z E z L e t L ee z e z e z z e e z∞----------=====+++==--∑2-2 试求下列函数的终值:(1)112();(1)Tz E z z --=-解: 11111()(1)()1lim lim lim t z z Tz f t z E z z---→∞→→=-==∞- (2)2()(0.8)(0.1)z E z z z =--。
解:211(1)()(1)()0(0.8)(0.1)lim lim lim t z z z z f t z E z z z →∞→→-=-==--2-3* 已知()(())E z L e t =,试证明下列关系成⽴:(1)[()][];n z L a e t E a=证明:()()nn E z e nT z∞-==∑00()()()()[()]n n n n n n z z E e nT e nT a z L a e t a a ∞∞--=====∑∑ (2)()[()];dE z L te t TzT dz=-为采样周期。
证明:11100[()]()()()()()()()()()nn n n n n n n n n L te t nT e nT zTz ne nT z dE z de nT z dz dz e nT n zne nT z ∞∞---==∞-=∞∞----======-=-∑∑∑∑∑所以:()[()]dE z L te t Tzdz=- 2-4 试求下图闭环离散系统的脉冲传递函数()z Φ或输出z 变换()C z 。

普通高等教育“十一五”国家级规划教材全国高等专科教育自动化类专业规划教材《自动控制原理》习题答案主编:陈铁牛机械工业出版社1-11-21-3闭环控制系统主要由被控对象,给定装置,比较、放大装置,执行装置,测量和变送装置,校正装置等组成。
被控对象:指要进行控制的设备和过程。
给定装置:设定与被控量相对应给定量的装置。
比较、放大装置:对给定量与测量值进行运算,并将偏差量进行放大的装置。
执行装置:直接作用于控制对象的传动装置和调节机构。
测量和变送装置:检测被控量并进行转换用以和给定量比较的装置。
校正装置:用以改善原系统控制性能的装置。
题1-4答:(图略)题1-5答:该系统是随动系统。
(图略)题1-6答:(图略)题2-1 解:(1)F(s)=12s 1+-Ts T(2)F(s)=0.5)421(2+-s s(3)F(s)=428+⋅s es sπ(4)F(s)=25)1(12+++s s(5)F(s)=32412ss s ++ 题2-2 解:(1) f(t)=1+cost+5sint (2) f(t)=e -4t(cost-4sint)(3) f(t)=t t t te e e 101091811811----- (4) f(t)= -tt t te e e ----+-3118195214(5) f(t)= -tt e e t 4181312123--+++题2-3 解:a)dtdu u C R dt du R R c c r 22111=++)( b)r c c u CR dt du R R u C R dt du R R 1r 12112111+=++)( c) r r r c c c u dtdu C R C R dtu d C C R R u dtdu C R C R C R dtu d C C R R +++=++++)()(1211222121122111222121 题2-4 解:a) G(s)=1)(212++s T T sT (T 1=R 1C, T 2=R 2C )b) G(s)=1)(1212+++s T T s T (T 1=R 1C, T 2=R 2C )c) G(s)= 1)(1)(32122131221+++++++s T T T s T T s T T s T T (T 1=R 1C 1, T 2=R 1C 2, T 3=R 2C 1, T 4=R 2C 2 )题2-5 解:(图略)题2-6 解:33)(+=Φs s 题2-7 解:a) ksf ms s +-=Φ21)(b) )()()(1))(1)(()(21221s G s G s G s G s G s +++=Φc) )()(1)())()(()(31321s G s G s G s G s G s ++=Φd) )()()()(1))()()(323121s G s G s G s G s G s G s -+-=Φe) G(s)=[G 1(s)- G 2(s)]G 3(s)f) )()()()()()()()()()(1)()()()()(43213243214321s G s G s G s G s G s G s G s G s G s G s G s G s G s G s +-++=Φg) )()()()()()()()(1)()()()(43213212321s G s G s G s G s G s G s G s G s G s G s G s -+-=Φ题2-8 解:102310)1()()(k k s s T Ts k k s R s C ⋅++++⋅=1023101)1()()(k k s s T Ts k k s N s C ⋅++++⋅=1023102)1()()(k k s s T Ts s T k k s N s C ⋅++++⋅⋅⋅= 题2-9 解:)()()()(1)()()(4321111s G s G s G s G s G s R s C +=)()()()(1)()()(4321222s G s G s G s G s G s R s C +=)()()()(1)()()()()(432142121s G s G s G s G s G s G s G s R s C +=)()()()(1)()()(4321412s G s G s G s G s G s R s C += 题2-10 解:(1)3212321)()(k k k s k k k s R s C +=3212032143)()()(k k k s s G k k k s k k s N s C +⋅+= (2) 2140)(k k sk s G ⋅-= 题2-11 解:122212211111)()1()()(z z s T s T T C s T T s T k k s s m m d e L ⋅++⋅+++⋅=ΘΘ (T 1=R 1C, T 2=R 2C, T d =L a /R a , T m =GD 2R a /375C e C m )第三章 习题答案3-1. s T 15=(取5%误差带) 3-2. 1.0=H K K=2 3-3.当系统参数为:2.0=ξ,15-=s n ω时,指标计算为:%7.52%222.0114.32.01===-⨯---e eξξπσs t ns 352.033=⨯==ξωs t n p 641.02.01514.3122=-⨯=-=ξωπ当系统参数为:0.1=ξ,15-=s n ω时,系统为临界阻尼状态,系统无超调,此时有:st ns 95.057.10.145.67.145.6=-⨯=-=ωξ3-4.当110-=s K 时,代入上式得:110-=s n ω,5.0=ξ,此时的性能指标为:%3.16%225.0114.35.01===-⨯---e eξξπσs t ns 6.0105.033=⨯==ξωs t n p 36.05.011014.3122=-⨯=-=ξωπ当120-=s K 时,代入上式得:11.14-=s n ω,35.0=ξ,此时的性能指标为:%5.30%2235.0114.335.01===-⨯---e eξξπσs t ns 6.01.1435.033=⨯==ξω由本题计算的结果可知:当系统的开环放大倍数增大时,其阻尼比减小,系统相对稳定性变差,系统峰值时间变短,超调量增大,响应变快,但由于振荡加剧,调节时间不一定短,本题中的调节时间一样大。
自动控制原理第三版答案自动控制原理是现代控制工程中的重要基础课程,它涉及到系统建模、控制器设计、稳定性分析等方面的内容。
在学习自动控制原理的过程中,很多同学都会遇到一些难题,特别是关于习题和答案的部分。
为了帮助大家更好地学习和掌握自动控制原理,本文将针对自动控制原理第三版的习题答案进行详细讲解,希望能够对大家有所帮助。
1. 第一章习题答案。
1.1 习题1。
答,这道题目主要是考察对自动控制原理的基本概念的理解。
根据定义,自动控制原理是研究如何设计控制器,使得系统的输出能够按照既定的要求进行调节。
因此,正确答案应该是A。
1.2 习题2。
答,这道题目要求对控制系统的分类进行判断。
根据控制系统的特点,可以将其分为连续控制系统和离散控制系统。
而在连续控制系统中,又可以分为模拟控制系统和数字控制系统。
因此,正确答案应该是D。
2. 第二章习题答案。
2.1 习题1。
答,这道题目主要考察对系统传递函数的计算。
根据系统传递函数的定义,可以通过系统的输入和输出之间的关系来进行计算。
在这道题目中,根据给定的系统输入和输出,可以计算出系统的传递函数为G(s)=1/(s+1)。
因此,正确答案应该是B。
2.2 习题2。
答,这道题目要求对系统的稳定性进行分析。
根据系统的传递函数和极点的位置,可以判断系统的稳定性。
在这道题目中,根据系统传递函数的极点为-1,可以判断系统是稳定的。
因此,正确答案应该是A。
3. 第三章习题答案。
3.1 习题1。
答,这道题目主要是考察对PID控制器的参数调节。
根据PID控制器的定义,可以通过调节比例系数、积分系数和微分系数来实现对系统的控制。
在这道题目中,可以通过试错法来逐步调节PID参数,使得系统的性能达到最优。
因此,正确答案应该是C。
3.2 习题2。
答,这道题目要求对系统的根轨迹进行分析。
根据根轨迹的性质,可以通过系统的传递函数来绘制根轨迹,并分析系统的稳定性。
在这道题目中,可以通过绘制根轨迹图来判断系统的稳定性。