第五章典型飞行控制系统工作原理(4)
- 格式:ppt
- 大小:2.34 MB
- 文档页数:91
直升机飞行操控的基本原理图 1 直升机飞行操纵系统- 概要图(a)(b)图2 直升机操纵原理示意图1.改变旋翼拉力的大小2.改变旋翼拉力的方向3.改变尾桨的拉力飞行操纵系统包括周期变距操纵系统、总距操纵系统和航向操纵系统。
如图2所示,周期变距操纵系统控制直升机的姿态(横滚和俯仰),总距操纵系统控制直升机的高度,航向操纵系统控制直升机的航向。
一、周期变距操纵系统周期操纵系统用于操纵旋翼桨叶的桨距周期改变。
当桨距周期改变时,引起桨叶拉力周期改变,而桨叶拉力的周期改变,又引起桨叶周期挥舞,最终使旋翼锥体相对于机身向着驾驶杆运动的方向倾斜,从而实现直升机的纵向(包括俯仰)及横向(包括横滚)运动。
纵向和横向操纵虽然都通过驾驶杆进行操纵,但二者是各自独立的。
周期变距操纵系统(见图3)包括右侧和左侧周期变距操纵杆(1)和(3)、可调摩擦装置(2)、橡胶波纹套(4)、俯仰止动件(5)、横滚连杆(7)、俯仰连杆(8)、横滚止动件及中立位置定位孔(9)、横滚拉杆(10)、横滚协调拉杆(11)、俯仰扭矩管轴组件(12)、总距拉杆(13)、与复合摇臂相连接的拉杆(14)、伺服机构(15)、伺服机构(横滚+总距)(16)、伺服机构(俯仰+总距)(17)和可调拉杆(18)等组件。
1.右侧周期变距操纵杆3.左侧周期变距操纵杆2.可调摩擦装置4.橡胶波纹套5.俯仰止动件6.复合摇臂 7.横滚连杆8.俯仰连杆9.横滚止动件及中立位置定位孔10.横滚拉杆11.横滚协调拉杆12.俯仰扭矩管轴组件13.总距拉杆14.与复合摇臂相连接的拉杆15.伺服机构16.伺服机构(横滚+总距)17.伺服机构(俯仰+总距)18.可调拉杆图 3 直升机周期变距操纵系统(一)纵向操纵情况当前推驾驶杆时,通过俯仰扭矩管轴组件(9)及俯仰连杆(8),使复合摇臂(6)上的纵向摇臂逆时针转动,通过其后的拉杆、摇臂,使左前侧纵向伺服机构下移,自动倾斜器固定盘向左前方倾斜,旋翼桨盘前倾,进而使直升机向前运动。
飞行器飞行控制与导航系统设计第一章:引言随着航空技术的飞速发展,飞行器的飞行控制与导航系统的设计变得愈发重要。
飞行控制与导航系统是保障飞行器安全飞行的关键因素之一。
本文将从飞行控制与导航系统的概述入手,深入探讨该系统的设计原理和方法。
第二章:飞行控制系统飞行控制系统主要由飞行控制计算机、执行器、传感器以及作动器等组成。
飞行控制计算机是飞行控制系统的核心,其通过算法和模型来控制飞行器的姿态、航向和高度等。
执行器负责将计算机生成的指令转化为力和力矩,通过作动器作用于飞行器。
传感器则用于采集飞行器的各种状态参数。
飞行控制系统的设计目标是确保飞行器的稳定性、可靠性和安全性。
第三章:导航系统导航系统是指飞行器用于确定其位置、速度和航向等信息的系统。
常见的导航系统包括惯性导航系统(INS)、全球定位系统(GPS)和惯性/全球定位系统(INS/GPS)等。
惯性导航系统通过加速度计和陀螺仪等传感器来测量飞行器的加速度和角速度,进而计算出其位置和航向。
全球定位系统则通过接收地面的卫星信号,来确定飞行器的准确位置和速度。
惯性/全球定位系统是结合了两者优点的一种导航系统。
第四章:飞行控制与导航系统的设计原理飞行控制与导航系统的设计原理主要包括建模、控制算法选择和系统集成等方面。
建模是指将飞行器的动力学和环境模型抽象为数学模型。
控制算法是指根据这些模型,选择合适的控制策略来实现稳定控制和导航。
系统集成则是指将飞行控制系统与导航系统进行有机地集成,确保二者之间的相互作用。
第五章:飞行控制与导航系统的设计方法飞行控制与导航系统的设计方法包括仿真、实验和实际飞行验证等。
仿真是指利用计算机模型来进行系统设计和性能评估。
实验则是通过实际物理设备进行系统验证和优化。
最终需要进行实际飞行验证,以验证系统在真实飞行环境中的性能表现。
第六章:飞行控制与导航系统的发展趋势随着航空技术的不断进步,飞行控制与导航系统也在不断发展。
未来,飞行控制与导航系统将更加智能化和自动化。
飞机飞行控制系统飞行控制系统(简称飞控系统)的作用是保证飞机的稳定性和操纵性,提高飞机飞行性能和完成任务的能力,增强飞行的安全性和减轻驾驶员的工作负担。
3.4.1. 飞行控制系统概述飞控系统分类飞控系统分为人工飞行控制系统和自动飞行控制系统两大类。
由驾驶员通过对驾驶杆和脚蹬的操纵实现控制任务的系统,称为人工飞行控制系统。
最简单的人工飞行控制系统就是机械操纵系统。
不依赖于驾驶员操纵驾驶杆和脚蹬指令而自动完成控制任务的飞控系统,称为自动飞行控制系统。
自动驾驶仪是最基本的自动飞行控制系统。
飞控系统构成飞控系统由控制与显示装置、传感器、飞控计算机、作动器、自测试装置、信息传输链及接口装置组成。
控制及显示装置是驾驶员输入飞行控制指令和获取飞控系统状态信息的设备,包括驾驶杆、脚蹬、油门杆、控制面板、专用指示灯盘和电子显示器(多功能显示器、平视显示器等)。
传感器为飞控系统提供飞机运动参数(航向角、姿态角、角速度、位置、速度、加速度等)、大气数据以及相关机载分系统(如起落架、机轮、液压源、电源、燃油系统等)状态的信息,用于控制、导引和模态转换。
飞控计算机是飞控系统的“大脑”,用来完成控制逻辑判断、控制和导引计算、系统管理并输出控制指令和系统状态显示信息。
作动器是飞控系统的执行机构,用来按飞控计算机指令驱动飞机的各种舵面、油门杆、喷管、机轮等,以产生控制飞机运动的力和力矩。
自测试装置用于飞行前、飞行中、飞行后和地面维护时对系统进行自动监测,以确定系统工作是否正常并判断出现故障的位置。
信息传输链用于系统各部件之间传输信息。
常用的传输链有电缆、光缆和数据总线。
接口装置用于飞控系统和其他机载系统之间的连接,不同的连接情况可以有多种不同的接口形式。
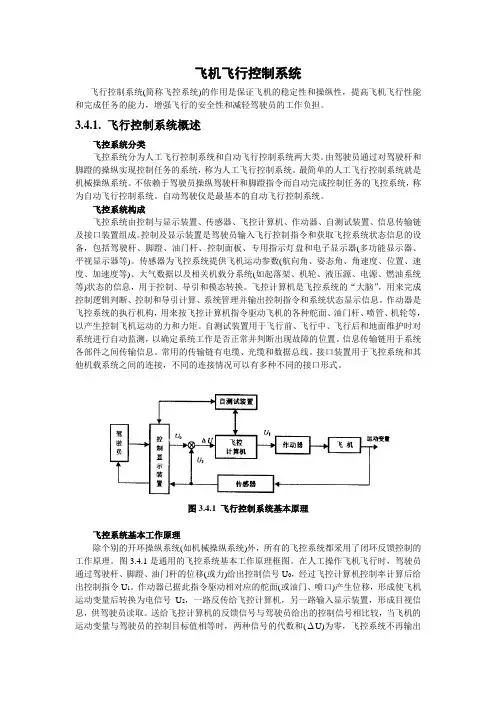
图3.4.1 飞行控制系统基本原理飞控系统基本工作原理除个别的开环操纵系统(如机械操纵系统)外,所有的飞控系统都采用了闭环反馈控制的工作原理。
图3.4.1是通用的飞控系统基本工作原理框图。
直升机飞行操控的基本原理图 1 直升机飞行操纵系统- 概要图(a)(b)图2 直升机操纵原理示意图1.改变旋翼拉力的大小2.改变旋翼拉力的方向3.改变尾桨的拉力飞行操纵系统包括周期变距操纵系统、总距操纵系统和航向操纵系统。
如图2所示,周期变距操纵系统控制直升机的姿态(横滚和俯仰),总距操纵系统控制直升机的高度,航向操纵系统控制直升机的航向。
一、周期变距操纵系统周期操纵系统用于操纵旋翼桨叶的桨距周期改变。
当桨距周期改变时,引起桨叶拉力周期改变,而桨叶拉力的周期改变,又引起桨叶周期挥舞,最终使旋翼锥体相对于机身向着驾驶杆运动的方向倾斜,从而实现直升机的纵向(包括俯仰)及横向(包括横滚)运动。
纵向和横向操纵虽然都通过驾驶杆进行操纵,但二者是各自独立的。
周期变距操纵系统(见图3)包括右侧和左侧周期变距操纵杆(1)和(3)、可调摩擦装置(2)、橡胶波纹套(4)、俯仰止动件(5)、横滚连杆(7)、俯仰连杆(8)、横滚止动件及中立位置定位孔(9)、横滚拉杆(10)、横滚协调拉杆(11)、俯仰扭矩管轴组件(12)、总距拉杆(13)、与复合摇臂相连接的拉杆(14)、伺服机构(15)、伺服机构(横滚+总距)(16)、伺服机构(俯仰+总距)(17)和可调拉杆(18)等组件。
1.右侧周期变距操纵杆3.左侧周期变距操纵杆2.可调摩擦装置4.橡胶波纹套5.俯仰止动件6.复合摇臂 7.横滚连杆8.俯仰连杆9.横滚止动件及中立位置定位孔10.横滚拉杆11.横滚协调拉杆12.俯仰扭矩管轴组件13.总距拉杆14.与复合摇臂相连接的拉杆15.伺服机构16.伺服机构(横滚+总距)17.伺服机构(俯仰+总距)18.可调拉杆图 3 直升机周期变距操纵系统(一)纵向操纵情况当前推驾驶杆时,通过俯仰扭矩管轴组件(9)及俯仰连杆(8),使复合摇臂(6)上的纵向摇臂逆时针转动,通过其后的拉杆、摇臂,使左前侧纵向伺服机构下移,自动倾斜器固定盘向左前方倾斜,旋翼桨盘前倾,进而使直升机向前运动。
飞行控制系统为了使无人机飞行控制系统具有强大的数据处理能力、较低的功耗、较强的灵活性和更高的集成度,提出了一种以SmartFusion为核心的无人机飞行控制系统解决方案。
为满足飞控系统实时性和稳定性的要求,系统采用了μC/OS-Ⅱ实时操作系统。
与传统的无人机飞行控制系统相比,在具有很强的数据处理能力的同时拥有较小的体积和较低的功耗。
多次飞行证明,各个模块设计合理,整个系统运行稳定,可以用作下一代无人机高性能应用平台。
关键词:无人机;飞行控制系统;SmartFusion芯片;μC/OS-Ⅱ0 引言飞行控制系统是无人机的重要组成部分,是飞行控制算法的运行平台,它的性能好坏直接关系着无人机能否安全可靠的飞行。
随着航空技术的发展,无人机飞行控制系统正向着多功能、高精度、小型化、可复用的方向发展。
高精度要求无人机控制系统的精度高,稳定性好,能够适应复杂的外界环境,因此控制算法比较复杂,计算速度快,精度高;小型化则对控制系统的重量和体积提出了更高的要求,要求控制系统的性能越高越好,体积越小越好。
此外,无人机飞行控制系统还要具有实时、可靠、低成本和低功耗的特点。
基于以上考虑,本文从实际工程应用出发,设计了一种基于SmartFusion的无人机飞行控制系统。
1 飞控系统总体设计飞行控制系统在无人机上的功能主要有两个:一是飞行控制,即无人机在空中保持飞机姿态与航迹的稳定,以及按地面无线电遥控指令或者预先设定好的高度、航线、航向、姿态角等改变飞机姿态与航迹,保证飞机的稳定飞行,这就是通常所谓的自动驾驶;二是飞行管理,即完成飞行状态参数采集、导航计算、遥测数据传送、故障诊断处理、应急情况处理、任务设备的控制与管理等工作。
飞行控制系统主要完成3个功能任务,其层次构成为三层:最底层的任务是提高无人机运动和突风减缓的固有阻尼——三个轴方向的阻尼器功能;第2层的任务是稳定无人机的姿态角——基本驾驶仪的功能(主要进行角运动控制);第3层的任务是控制飞行高度、航迹和飞行速度,实现较高级自动驾驶功能。