自动飞行控制系统电子讲稿第一部分
- 格式:doc
- 大小:16.90 MB
- 文档页数:25

第一章飞行控制系统概述1.1飞行器自动控制1.1.1飞行控制系统的功能随着飞行任务的不断复杂化,对飞机性能的要求越来越高,不仅要求飞行距离远(例如运输机),高度高(高空侦察机),而且还要求飞机有良好的机动性(例如战斗机)。
为了减轻驾驶员在长途飞行中的疲劳,或使驾驶员集中精力战斗,希望用自动控制系统代替驾驶员控制飞行,并能改善飞机的飞行性能。
这种系统就是现代飞机上安装的飞行自动控制系统。
飞行控制系统的功能归结起来有两点:1)实现飞机的自动飞行;2)改善飞机的飞行性能。
飞机的自动飞行控制系统在无人参与的情况下,自动操纵飞机按规定的姿态和航迹飞行,通常可实现对飞机的三轴姿态角和飞机三个方向的空间位置的自动控制与稳定。
例如,无人驾驶飞行器(如无人机或导弹等),实现完全的飞行自动控制;对于有人驾驶的飞机(如民用客机或军用飞机),虽然有人参与驾驶,但某些飞行阶段(如巡航段),驾驶员可以不直接参与操纵,而由飞行控制系统实现对飞机飞行的自动控制,但驾驶员应完成对自动飞行指令的设置和监督自动飞行的情况,并可以随时切断自动控制而实现人工驾驶。
采用自动飞行具有以下优点:1)长距离飞行时解除驾驶员的疲劳,减轻驾驶员的工作负担;2)在一些恶劣天气或复杂的环境下,驾驶员难于精确控制飞机的姿态和航迹,自动飞行控制系统可以精确对飞机姿态和航迹的精确控制;3)有一些飞行操纵任务,驾驶员难于精确完成,如进场着陆,采用自动飞行控制则可以较好地完成任务。
一般来说,飞机的性能和飞行品质是由飞机本身气动特性和发动机特性决定的,但随着飞机飞行高度及飞行速度的增加,飞机的自身特性将会变坏。
如飞机在高空飞行时,由于空气稀薄,飞机的阻尼特性变坏,致使飞机角运动产生严重的摆动,靠驾驶员人工操纵将会很困难。
此外,设计飞机时,为了减小质量和阻力,提高有用升力,将飞机设计成静不稳定的。
对于这种静不稳定的飞机,驾驶员是难于操纵的。
在飞机上采用增稳系统或阻尼系统可以很好地解决这些问题。
《飞机电传操纵系统与主动控制技术》——飞机教材自动飞行控制一、飞机电传操纵系统的概述飞机电传操纵系统,简称FBW(FlyWire),是一种利用电子信号传输指令的飞行控制系统。
它取代了传统的机械操纵系统,将飞行员的操纵指令转化为电子信号,通过计算机处理后,控制飞机的舵面和发动机,实现飞行控制。
电传操纵系统的优势在于重量轻、可靠性高、响应速度快、操纵灵活,并且能够实现复杂的飞行控制律。
在现代民用和军用飞机中,电传操纵系统已成为标配。
二、电传操纵系统的组成及工作原理1. 组成(1)操纵杆:飞行员通过操纵杆输入指令。
(2)传感器:实时监测飞机的姿态、速度等参数。
(3)飞行控制计算机:处理飞行员指令和传感器数据,输出控制信号。
(4)执行机构:根据控制信号,驱动飞机舵面和发动机。
2. 工作原理(1)飞行员操纵杆输入指令。
(2)传感器将飞机的姿态、速度等参数传输给飞行控制计算机。
(3)飞行控制计算机根据预设的控制律,处理飞行员指令和传感器数据,输出控制信号。
(4)执行机构根据控制信号,驱动飞机舵面和发动机,实现飞行控制。
三、主动控制技术及其在电传操纵系统中的应用1. 主动控制技术概述主动控制技术是指通过飞行控制系统,对飞机的气动布局、结构强度和飞行性能进行实时优化,以提高飞行品质和性能。
在电传操纵系统中,主动控制技术发挥着重要作用。
2. 主动控制技术在电传操纵系统中的应用(1)放宽静稳定性(RSS):通过主动控制技术,使飞机在飞行过程中保持较小的静稳定性,提高飞行性能。
(2)机动载荷控制(MLC):在飞机进行机动飞行时,主动控制技术可减小机动载荷,降低结构疲劳。
(3)颤振抑制:利用主动控制技术,实时监测飞机结构振动,采取措施抑制颤振现象。
(4)阵风减缓:在遭遇阵风时,主动控制技术可减小飞机受阵风影响,提高乘坐舒适性。
飞机电传操纵系统与主动控制技术的结合,为现代飞行器带来了更高的性能和安全性。
在未来的航空领域,这两项技术将继续发挥重要作用,推动飞行器的发展。
学习情景1 课程导论1.飞行控制系统发展概述自动飞行控制系统已有100多年的研制历史,早在有人驾驶飞机出现之前,自动飞行装置即已出现。
1.1方向稳定器1873年,法国雷纳德(C.C.Renard)无人多翼滑翔机的方向稳定器。
1.2 电动陀螺稳定装置-姿态稳定1914年,美国的爱莫尔·斯派雷(Eimer Sperry)研制成功第一台可以保持飞机稳定平飞的电动陀螺稳定装置,该装置利用陀螺的稳定性和进动性,建立一个测量基准,用来测量飞机的姿态,它和飞机的控制装置连在一起,一旦飞机偏离指定的状态,这个机构就通过飞机的控制装置操纵飞机的舵面偏转使飞机恢复到原来的状态。
1.3 自动驾驶仪20世纪30年代出现了可以控制和保持飞机高度、速度和航迹的自动驾驶仪。
第二次世界大战促使自动驾驶仪等设备得到进一步发展,由过去气动-液压到全电动,由三个陀螺分别控制三个通道改用一个或两个陀螺来操纵飞机,并可作机动、爬高及自动保持高度等。
➢二次大战期间,美国和原苏联相继研制出功能较完善的电气式自动驾驶仪C-1和其仿制品A∏-5;➢德国在二战后期研制成功飞航式导弹V-1和弹道式导弹V-2,更进一步促进了飞行自动控制装置的研制和发展。
20世纪50年代后,和导航系统、仪表着陆系统相联,自动驾驶装置实现了长距离自动飞行和自动着陆。
1.4 自动飞行控制系统1947年成功突破音障后,飞机的飞行包线(飞行速度和高度的变化范围)扩大,越来越复杂的飞行任务对飞机性能的要求也越来越高,仅靠气动布局和发动机设计所获得的飞机性能已经很难满足复杂飞行任务的要求。
因此,借助于自动控制技术来改善飞机稳定性的飞行自动控制装置(如增稳系统)相继问世,在此基础上,自动驾驶仪的功能得到进一步的扩展,发展成为自动飞行控制系统(AFCS)。
20世纪60年代,产生了随控布局飞行器(congtrol configured vehicle--CCV)的设计思想。
20世纪60年代前的以模拟电路或模拟计算机为主要计算装置的飞行控制系统,逐渐发展成为现在已普遍应用的数字式飞行控制系统,这也为新技术应用和更复杂更完善系统的综合提供了实现的可能性。
例如:➢主动控制技术(active control technology—ACT);➢余度技术➢容错控制技术➢20世纪80年代得到迅速发展的火/推/飞综合控制系统等。
20世纪70年代中期,由于计算机的应用使自动驾驶仪和飞机的指引系统组成一个综合系统,使飞机的各种传感器数据、指引与控制系统已在飞行管理系统中,从而实现了更高程度的自动化。
20世纪70年代末期,计算机和控制技术的迅速发展,使自动驾驶仪的功能迅速扩展。
在现代化的大中型民航客机上,自动飞行控制系统通常包括自动驾驶仪、飞行指引系统、自动油门系统、偏航阻尼系统、安定面自动配平等。
2.自动飞行控制系统的基本概念(1)飞行控制通过某种手段,使用一定的设备,从而实现对飞行器的飞行运动和模态变化所进行的控制。
(2)飞行运动和模态变化飞行器的飞行运动和模态变化,包括其重心的线运动、绕重心的角运动,以及飞行器的几何形状与结构模态的改变。
(2)飞行器是对可以在大气层内或在外层空间中飞行的装置的统称。
➢无人驾驶飞行器➢有人驾驶飞行器(3)飞行控制系统实现飞行器飞行控制所使用的设备(由装置、机构组成并建立的开环或闭环信息传递链),称之为飞行控制系统。
3.飞行控制系统的分类(1)人工飞行控制系统由驾驶员通过对驾驶杆和脚蹬的操纵实现控制任务的飞控系统,称为人工飞行控制系统。
(2)自动飞行控制系统不依赖于驾驶员操纵驾驶杆和脚蹬指令而自动完成控制任务的飞控系统,称为自动飞行控制系统。
自动驾驶仪操纵飞机的方框图按采用的飞行操纵系统分类⏹机械式飞控系统⏹液压式飞控系统⏹电传飞控系统➢模拟式电传飞控系统➢数字式电传飞控系统⏹光纤式飞控系统(光传飞控系统)⏹电驱式飞控系统⏹智能式飞控系统4.飞行控制系统的基本组成在现代化大中型民航客机上,自动飞行控制系统通常包括:(1)自动驾驶仪(A/P);(2)飞行指引仪(F/D);(3)安定面配平系统(STAB/T);(4)偏航阻尼器(Y/D);(5)自动油门系统(A/T)民用飞机飞行控制系统的基本组成按照ATA100对飞机系统内容的编排,自动飞行控制系统属于ATA100-22章节的内容。
人工飞行控制系统是由驾驶员手动操纵的主辅飞行操纵系统,属于ATA100-27章节的内容。
军用飞机自动飞行控制系统除了上述ATA100-22章节的内容,还有自动地形跟随和自动地形回避系统,与火控系统交联控制以及其它一些特殊控制要求的系统。
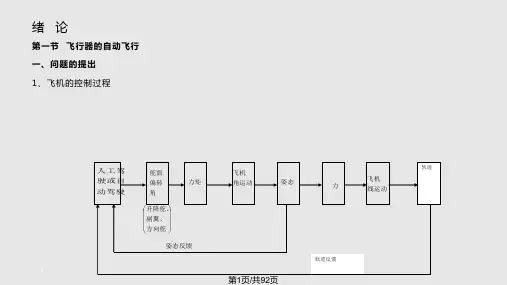
5.自动飞行控制系统的作用增加飞行安全改善飞行品质减轻驾驶员负担学习情景2 自动驾驶仪学习单元1 自动驾驶仪基础1. 基本原理⏹驾驶员控制飞机飞行的过程,如图1-1;⏹自动驾驶仪控制飞机飞行的过程,如图1-2;⏹自动驾驶仪控制飞机飞行过程中,敏感比较元件、放大计算装置和执行机构可以代替驾驶员的眼睛、大脑神经系统与肢体,自动控制飞机的飞行。
⏹敏感比较元件、放大计算装置和执行机构是自动飞行控制系统的核心,即自动驾驶仪。
⏹自动驾驶仪是利用反馈控制原理(负反馈)来实现对飞机运动参数的控制。
图1-2自动驾驶仪操纵飞机的方框图2. 描述飞机运动的参数⏹三个姿态角:俯仰角、倾斜角和偏航角。
⏹三个角速度:俯仰角速度、倾斜角速度和偏航角速度。
⏹两个气流角:迎角(或称攻角)和侧滑角。
⏹三个线位移:⏹三个线速度:⏹两个航迹角:航迹俯仰角和航迹偏转角。
自动飞行控制系统可在无人参与的情况下自动控制上述部分或全部参数,必要时还可以控制马赫数及法向过载等坐标系—复习空气动力学⏹地面坐标系⏹机体坐标系⏹速度坐标系(气流坐标系)飞机的姿态角——机体坐标系与地面坐标系的关系⏹俯仰角:机体纵轴与其在地平面投影线之间的夹角。
以抬头为正;⏹偏航角:机体纵轴在地平面上的投影与选定方向间的夹角。
以机头左偏航为正(机头方向偏在预选航向的右边)。
⏹滚转角:又称倾斜角,指机体竖轴(飞机对称面)与通过机体轴的铅垂面间的夹角。
飞机右倾斜时为正。
飞机的轨迹角——地速坐标系与地面坐标系间的关系⏹航迹倾斜角θ⏹航迹偏转(方位)角ψs⏹航迹滚转角γs气流角空速坐标与机体坐标系的关系⏹迎角α⏹侧滑角β3. 基本组成⏹测量元件或称敏感元件用来测量飞机的运动参数,俯仰角、倾斜角和偏航角,如:➢速率陀螺测量角速度;➢垂直陀螺测量飞机的俯仰角、倾斜角(或称滚转角);➢航向陀螺测量飞机的偏航角等⏹信号处理元件(或称计算元件)把各种敏感元件的输出信号处理为符合控制规律要求的信号,包括有综合装置、微分器、积分器、限幅器、滤波器等⏹放大元件放大上述处理过的信号的元件,一般指功率放大。
⏹执行机构根据放大元件的输出信号带动舵面偏转的机构,亦成为舵机。
4. 主要功用当自动驾驶仪衔接后,可以实现的主要功能有:⏹自动保持飞机沿三个轴的稳定(姿态稳定);⏹接受驾驶员指令,操纵飞机以达到希望的俯仰角、航向角、空速或升降速度等;⏹接受驾驶员的设定,控制飞机按预定的高度、预定的航向飞行;⏹与飞行管理计算机系统耦合,实现按预定飞行轨迹的飞行;⏹与仪表着陆系统(ILS)耦合,实现飞机的自动着陆(CATⅠ, Ⅱ,Ⅲ等)5. 分类⏹自动驾驶仪可以按其控制规律来划分,也可按实现控制的手段来划分,还可按控制轴的数目或实现解算的手段来划分。
⏹自动驾驶仪常用的分类方法是按其控制规律来划分。
⏹所谓控制规律通常是指自动驾驶仪输出的舵偏角与信号的静、动态函数关系。
5.1 按控制规律分类⏹比例式自动驾驶仪⏹积分式自动驾驶仪5.2 按控制坐标轴个数分类(1)单轴式最简单的单轴式自动驾驶仪通过副翼控制飞机的倾斜轴,称作平飞器,最早出现在轻型飞机,它使驾驶员从长途飞行中解脱出来。
(2)双轴式可控制倾斜轴和偏航轴,能和导航设备交联,实现平飞以及飞行方向的控制,如保持航向或航道等。
(3)三轴式用于俯仰、倾斜和偏航轴的控制,可以保持飞机平飞,保持无线电航道,保持气压高度或升降速度。
⏹俯仰轴(通道)是通过控制升降舵,利用姿态的改变来实现飞机的爬升与下降或实现对速度或高度的稳定;⏹倾斜轴主要是利用副翼对倾斜角进行稳定,实现定向飞行。
⏹偏航轴利用方向舵来实现。
现代飞机的自动驾驶仪通过与飞行管理计算机系统交联,与自动油门系统协同工作,可以按照预先制定的飞行计划,实现从起飞后的爬升、巡航、下降、进近知道着陆各飞行阶段上的自动控制,包括三轴姿态、发动机推力以及改平并过渡到减速滑跑等控制。
现代民航大型客运飞机上普遍装有这类自动驾驶系统,具备三类仪表着陆能力。
6. 舵回路、稳定回路和控制回路⏹自动驾驶仪工作时,以飞机为控制对象,实现飞机不同参数的控制与稳定。
⏹自动驾驶仪实现不同的功能,完成不同的飞行任务,要求组成不同的反馈控制回路。
⏹自动驾驶仪工作回路通常由以下四个回路组成:➢同步回路➢舵回路➢稳定回路➢控制回路6.1 同步回路⏹作用在自动驾驶仪衔接时,保证系统输出为零,即自动驾驶仪的工作状态与当时飞行状态同步。
⏹基本组成现代飞机上的同步回路通常由两部分组成:➢FCC内部的同步➢作动筒的同步6.2 舵回路⏹自动飞行控制系统根据输入信号,通过执行机构控制舵面。
⏹为改善舵机的性能,通常执行机构引入内反馈(将舵机的输出信号引到输入端),形成随动系统或称伺服回路,简称为舵回路。
⏹舵回路由舵机、放大器及反馈元件组成。
⏹反馈元件包括测速电机、位置传感器,构成舵回路的测速反馈和位置反馈。
⏹舵回路可用伺服系统理论来分析,其负载是舵面的惯性和作用在舵面上的气动力矩(铰链力矩)6.3 稳定回路⏹自动驾驶仪与飞机组成一个回路,该回路的主要功能是稳定飞机的姿态,即稳定飞机的角运动,称为稳定回路。
⏹由于稳定回路中包含了飞机,而飞机的动态特性有随飞行条件而变化,使稳定回路的分析变得较为复杂。
6.4 控制回路⏹稳定回路加上测量飞机重心位置或速度信号的元件以及表征飞机空间位置几何关系的运动学环节,组成更大的回路,称为控制回路或制导回路。
控制回路的作用是实现对飞机重心的运动即飞机运动轨迹的控制。
学习单元2角位移式自动驾驶仪控制规律及调节原理1. 概述⏹角位移式自动驾驶仪可以根据控制规律实现飞机三个姿态角的稳定;⏹所谓控制规律就是指控制器的输入量与输出量之间的关系;⏹自动驾驶仪是一种能够保持或改变飞机运动状态的自动控制器,其输入量与输出量之间的关系叫做自动驾驶仪的控制规律;⏹自动驾驶仪的输入信号来自飞机的某些运动参数或是从自动驾驶仪操纵装置来的控制信号;⏹自动驾驶仪的输出信号就是舵机的偏转角;⏹由于舵机是和舵面机械相连的,舵机与舵面之间只相差一个比例系数,所以可以认为自动驾驶仪的输出就是舵面的偏转角;⏹自动驾驶仪目前主要采用比例式和积分式两种控制规律;⏹比例式控制规律指舵面偏转角与自动驾驶仪输入信号(被控量的偏差)之间成比例关系;⏹积分式控制规律是指舵面偏转角与自动驾驶仪输入信号(被控量的偏差)之间成积分关系,或舵面偏转角速度与自动驾驶仪输入信号(被控量的偏差)之间成比例关系。