第五章典型飞行控制系统工作原理-横航向姿态控制
- 格式:ppt
- 大小:870.00 KB
- 文档页数:37
直升机飞行操控的基本原理图 1 直升机飞行操纵系统- 概要图(a)(b)图2 直升机操纵原理示意图1.改变旋翼拉力的大小2.改变旋翼拉力的方向3.改变尾桨的拉力飞行操纵系统包括周期变距操纵系统、总距操纵系统和航向操纵系统。
如图2所示,周期变距操纵系统控制直升机的姿态(横滚和俯仰),总距操纵系统控制直升机的高度,航向操纵系统控制直升机的航向。
一、周期变距操纵系统周期操纵系统用于操纵旋翼桨叶的桨距周期改变。
当桨距周期改变时,引起桨叶拉力周期改变,而桨叶拉力的周期改变,又引起桨叶周期挥舞,最终使旋翼锥体相对于机身向着驾驶杆运动的方向倾斜,从而实现直升机的纵向(包括俯仰)及横向(包括横滚)运动。
纵向和横向操纵虽然都通过驾驶杆进行操纵,但二者是各自独立的。
周期变距操纵系统(见图3)包括右侧和左侧周期变距操纵杆(1)和(3)、可调摩擦装置(2)、橡胶波纹套(4)、俯仰止动件(5)、横滚连杆(7)、俯仰连杆(8)、横滚止动件及中立位置定位孔(9)、横滚拉杆(10)、横滚协调拉杆(11)、俯仰扭矩管轴组件(12)、总距拉杆(13)、与复合摇臂相连接的拉杆(14)、伺服机构(15)、伺服机构(横滚+总距)(16)、伺服机构(俯仰+总距)(17)和可调拉杆(18)等组件。
1.右侧周期变距操纵杆3.左侧周期变距操纵杆2.可调摩擦装置4.橡胶波纹套5.俯仰止动件6.复合摇臂 7.横滚连杆8.俯仰连杆9.横滚止动件及中立位置定位孔10.横滚拉杆11.横滚协调拉杆12.俯仰扭矩管轴组件13.总距拉杆14.与复合摇臂相连接的拉杆15.伺服机构16.伺服机构(横滚+总距)17.伺服机构(俯仰+总距)18.可调拉杆图 3 直升机周期变距操纵系统(一)纵向操纵情况当前推驾驶杆时,通过俯仰扭矩管轴组件(9)及俯仰连杆(8),使复合摇臂(6)上的纵向摇臂逆时针转动,通过其后的拉杆、摇臂,使左前侧纵向伺服机构下移,自动倾斜器固定盘向左前方倾斜,旋翼桨盘前倾,进而使直升机向前运动。
航空航天领域中的飞行控制系统使用教程一、简介在航空航天领域中,飞行控制系统是保证飞行器安全、稳定飞行的关键组成部分。
飞行控制系统主要负责飞行器的操作、导航、稳定控制以及姿态调整等功能。
本篇文章将为读者提供航空航天领域中飞行控制系统的基本概念、工作原理以及使用教程。
二、飞行控制系统的基本概念1. 传感器:飞行控制系统使用各种传感器来获取飞行器的位置、速度、姿态等参数。
常用的传感器包括加速度计、陀螺仪、气压计等。
2. 控制器:控制器是飞行控制系统的核心部件,它根据传感器获取的数据,运算得出控制指令,控制飞行器的运动。
控制器通常是由微处理器或者嵌入式系统实现的。
3. 执行器:执行器是根据控制指令,对飞行器进行控制的装置,如电机、舵机等。
三、飞行控制系统的工作原理飞行控制系统的工作原理可以分为传感器数据获取、控制指令计算和执行器控制三个阶段。
1. 传感器数据获取:传感器对飞行器的运动进行感知,并将获取到的数据传输给控制器。
例如,陀螺仪可以感知飞行器的姿态变化,加速度计可以感知飞行器的加速度变化。
2. 控制指令计算:控制器根据传感器获取的数据,通过算法和控制策略计算出控制指令,以实现飞行器的姿态调整、导航等功能。
常用的控制算法包括PID控制器、模糊控制等。
3. 执行器控制:控制指令经过控制器处理后,发送给执行器,执行器负责根据指令控制飞行器的运动。
例如,电机执行器会根据控制指令控制飞行器的推力,舵机执行器会根据指令调整飞行器的姿态。
四、飞行控制系统的使用教程1. 安装和配置:根据飞行控制系统的使用手册,将控制器、传感器和执行器正确安装在飞行器上,并进行相应的配置设置。
确保连接稳定,并校准传感器。
2. 编程和逻辑控制:利用飞控固件软件,对控制器进行编程,设定相应的逻辑控制策略。
在编程过程中,可以根据实际需求,设定飞行器的基本参数,譬如最大速度、最大倾斜角等。
3. 飞行模式选择与切换:飞行控制系统通常支持多种飞行模式,如手动模式、自动模式、定点悬停模式等。
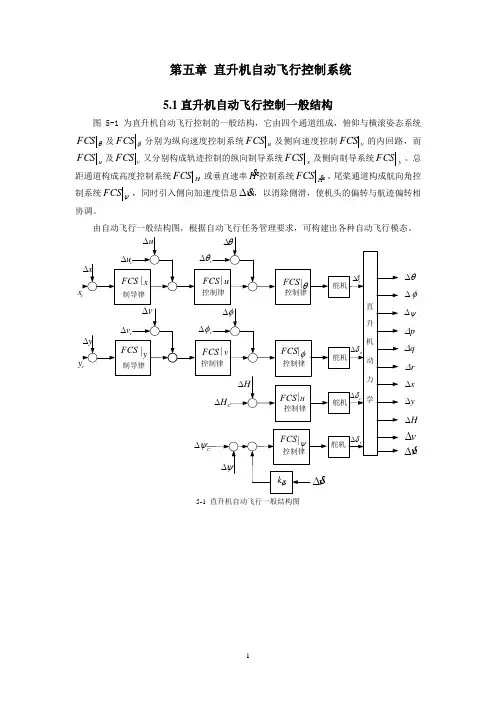
第五章 直升机自动飞行控制系统5.1直升机自动飞行控制一般结构图5-1为直升机自动飞行控制的一般结构,它由四个通道组成,俯仰与横滚姿态系统θFCS 及φFCS分别为纵向速度控制系统uFCS及侧向速度控制vFCS的内回路,而u FCS 及v FCS 又分别构成轨迹控制的纵向制导系统x FCS 及侧向制导系统y FCS 。
总距通道构成高度控制系统HFCS 或垂直速率H控制系统HFCS 。
尾桨通道构成航向角控制系统ψFCS ,同时引入侧向加速度信息v∆,以消除侧滑,使机头的偏转与航迹偏转相协调。
由自动飞行一般结构图,根据自动飞行任务管理要求,可构建出各种自动飞行模态。
ψν∆θ∆∆∆∆p ∆q ∆rx∆y ∆H∆φv ∆5-1 直升机自动飞行一般结构图5.2 各类自动飞行模态一般控制律5.2.1三轴姿态保持模态三轴姿态()ψφθ,,保持一般具有如图5-2所示结构。
侧向加速度v∆引入尾桨通道,以利于消除侧滑。
三轴姿态保持适用于全包线飞行,在稳定飞行状态下,一般要求姿态保持精度1±≤。
θ∆φ∆ψ∆=∆c θ=∆c φ=∆c ψp∆v∆r∆q∆图5-2 三轴姿态保持模态一般结构5.2.2空速保持模态空速保持模态是在俯仰姿态系统的基础上构成的,如图5-3所示。
通过控制飞机的姿态角θ,以达到纵向飞行速度控制目的。
当飞行速度75km/h ,一般速度控制精度为≤2.5m/s 。
空速保持模态工作时,其他通道应处于姿态保持状态。
∆图5-3 空速保持模块结构图5.2.3地速保持模态地速保持是指相对地面的纵向速度u 及侧向速度v 保持不变。
它是在横滚通道与俯仰通道基础上构成的。
如图5-4所示。
一般要求地速保持精度s m /2.1±≤,要求横滚角限制在8±≤。
(a ) 侧向地速保持(b ) 纵向地速保持 图5-4 地速保持模态5.2.4自动悬停模态自动悬停模态的内回路,由俯仰与横滚姿态系统构成,与地速保持模态时的俯仰与横滚姿态系统相一致,自动悬停的外回路由速度控制构成,它与地速保持模态的结构相一致,只是控制律的参数有变化。

航空航天中的飞行控制系统航空航天事业一直是人类追求飞翔梦想的象征。
在这个行业中,飞行控制系统扮演着至关重要的角色。
本文将介绍航空航天中的飞行控制系统的基本原理、关键技术以及未来发展方向。
一、飞行控制系统概述飞行控制系统是指航空航天器为了维持稳定的飞行状态所采用的一系列技术和设备的集合体。
其主要目标是确保飞行器安全地完成预定任务,并保证飞行过程中的舒适性。
飞行控制系统主要包括飞行姿态控制、导航系统、引擎控制系统以及航空电子设备等。
这些组成部分相互配合,通过传感器获取飞行器的状态信息,并根据预定的飞行计划进行计算和控制。
二、飞行控制系统的基本原理飞行控制系统的基本原理是通过控制飞行器的姿态、航向和速度,使其按照预定的轨迹安全飞行。
具体而言,飞行控制系统依赖于以下几个关键技术:1. 飞行姿态控制技术飞行姿态控制是指通过控制飞行器的姿态(如俯仰、横滚和偏航角)以及推力,使飞行器保持稳定飞行状态。
常用的控制手段包括机械控制、液压控制和电气控制等。
2. 导航系统导航系统是飞行控制系统中的关键组成部分,其作用是确定飞行器的位置和速度,并提供导航指令。
常见的导航系统包括惯性导航系统、全球卫星导航系统(如GPS)以及地面导航设备等。
3. 引擎控制系统引擎控制系统用于控制飞行器的动力系统,确保引擎工作稳定,并根据需要提供合适的推力。
这需要通过控制燃料供给、气流调节以及温度控制等手段来实现。
4. 航空电子设备航空电子设备包括飞行仪表、通信设备、自动驾驶系统等,它们与飞行控制系统密切相关,用于获取飞行器的状态信息并进行控制。
三、飞行控制系统的关键技术随着科技的发展,飞行控制系统不断向智能化、自主化发展。
以下几个关键技术将在未来的航空航天中得到应用:1. 自适应控制技术自适应控制技术能够根据飞行器在飞行过程中的变化状态进行实时调整,以适应不同的飞行条件,提高飞行器的稳定性和控制精度。
2. 传感器融合技术传感器融合技术是指将多种传感器(如惯性传感器、气压传感器、磁力传感器等)的数据进行综合和处理,提高飞行器的状态感知和控制能力。
第五章 横向运动 5.1 横向运动线性化方程前面推导出来的线性化的纵向方程组重写如下:⎪⎪⎪⎩⎪⎪⎪⎨⎧∆+∆=∆-+∆+-∆-∆+∆=∆+-∆-+∆-∆=∆-∆-+∆-∆-r a r pz xz v r a r x xz pv r r p v r a r a r N N r N dt d p N dt d I I v N L L r L dt d I I p L dt d v L Y g r Y u p Y v Y dt dδδδδδφθδδδδδ)()()()()cos ()()(00 (5.1-1)增加一个方程p dtd ∆=∆φ (5.1-2)将式(5.1-1)和(5.1-2)改写成ηB x A x+=形式,即 ⎥⎦⎤⎢⎣⎡∆∆⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡+++++⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡∆∆∆∆⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡++++++--=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡∆∆∆∆********************r a zxz zxz x xz xxz vz xz r pz xz p vz xz v rx xz r p xxz p v x xz vr pv r r a ar r a a rL I I N L I I N N I I L N I I L Y r p v L I I N L I I N L I I N N I I L N I I L N I I L g Y u Y Y r p v δδφθφδδδδδδδδδ000001000cos )(00(5.1-3)带星号的导数定义如下:))]/((1[2z x xz vv I I I L L -=*(5.1-4)))]/((1[2z x xz vv I I I N N -=*其余类似。
如果惯性积0=xz I ,则运动方程可简化为如下形式:⎥⎦⎤⎢⎣⎡∆∆⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡∆∆∆∆⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡--=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡∆∆∆∆r a r pv r p vr p v r a r ar N N L L Y r pv N N N L L L g Y u Y Y rp vδδφθφδδδδδ000001000cos )(00(5.1-5)有时用侧滑代替侧向速度比较方便,这两者之间的关系如下:arctanu v u v ∆≈∆=∆β (5.1-6)将式(5.1-5)改写为:⎥⎦⎤⎢⎣⎡∆∆⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡∆∆∆∆⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡--=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡∆∆∆∆r a r pr p r p r a r ar N N L L u Y r p N N N L L L u g u Y u Y u Y r p δδφβθφβδδδδδβββ00000100cos )1(0000 (5.1-7)横向导数见表5.1-1 表5.1-1横向导数横向运动的传递函数将状态方程取拉普拉斯变换,再用克莱姆规则(Cramer rule )就可以得到单输入/单输出(SISO )的传递函数。