三维激光扫描仪汇总
- 格式:ppt
- 大小:8.22 MB
- 文档页数:36
三维激光扫描仪中测距的方法与特点《三维激光扫描仪中测距的方法与特点》激光扫描技术是一种高精度的三维测量方法,主要用于建筑设计、制造业和文化遗产保护等领域。
测距是其中最基本的功能之一。
本文将介绍三维激光扫描仪中常用的测距方法和其特点。
一、相位测距法相位测距法是三维激光扫描仪中应用较为广泛的一种测距方法。
该方法基于激光光束的干涉原理,通过测量光束在发射和接收之间传播的距离差来获取目标物体的距离信息。
在扫描仪的计算系统中,利用光电二极管或其他传感器记录下光束经过的相位差,进而计算出目标物体的距离。
相位测距法具有较高的精度和测量范围,适用于大多数测距场景。
二、时间差测距法时间差测距法是另一种常用的测距方法。
该方法利用激光光束从发射到接收所需的时间来计算目标物体的距离。
通过激光脉冲的发射和接收时间的记录,结合光在空气中的传播速度,可以精确计算出测量目标与激光扫描仪之间的距离。
相较于相位测距法,时间差测距法的优势在于简单、快速,适用于运动目标的测量。
三、特点与应用三维激光扫描仪中测距的方法具有以下特点:1. 高精度:三维激光扫描仪能够实现毫米级的测量精度,具备非常高的测量精度,能够准确地捕捉目标物体的细节信息。
2. 高效率:激光扫描仪可以实现快速的数据采集,每秒钟可达到百万级的测量点,节省了大量的测量时间和人力成本。
3. 安全性:三维激光扫描仪在进行测量时通常使用红光激光束,与人眼视觉系统无害,无需担心安全问题。
四、总结三维激光扫描仪中的测距方法多样而灵活,可根据不同的测量需求选择合适的方法。
相位测距法和时间差测距法是两种常用的测距方法,各自具有优势和适用场景。
无论是高精度的建筑测量还是制造业中的质量控制,三维激光扫描仪都能够提供准确、快速且安全的测距解决方案。
三维激光扫描系统技术参数一.仪器精度:(1)点位精度:3 mm @ 50 m; 6 mm @ 100 m(2)距离精度:1.2 mm + 10 ppm(3)角度精度:8" / 8"(垂直/水平)(4)标靶获取精度:2 mm @ 50 m(5)双轴补偿器:实时机载液态传感器形式的双轴补偿,可选开/关,分辨率1’,补偿范围+/- 5’,补偿精度1.5"二.激光扫描:(6)激光类型:脉冲式,超高速WFD(波形数字化)增强技术,颜色及波长:1550 nm (不可见的) /658 nm (可见的),激光等级1级(符合IEC60825:2014标准)(7)扫描距离,范围:最小距离0.4 m最大范围270 m(34 %反射率),范围噪音*0.4 mm rms @ 10 m,0.5 mm rms @ 50 m(8)扫描速率:1000000点/秒(9)激光光斑大小:前窗激光光斑直径≤3.5mm(10)数据储存容量:256 GB内置固态硬盘(SSD)或外接USB设备(11)数据传输:千兆以太网,集成WLAN USB 2.0设备(12)机载界面显示:触摸屏(触笔)控制,真彩色VGA图形显示(640 x 480像素)(13)激光对中器:激光安全等级:1级(IEC 60825:2014)对中精度:1.5 mm @ 1.5 m 激光光斑直径:2.5 mm @ 1.5 m可打开/关闭(14)激光发散角:<0.23mrad(15)视场角:水平:360°(max)垂直:270°(max)照准:无视差,可变焦(16)仪器可同时使用两块内置锂电池和一块外挂锂电池,支持热交换2块内电池内置电池> 5.5小时(2块电池)外挂电池> 7.5小时(常温下)以便适应长时间野外作业;外接电源:24 V直流电或100 - 240 V交流电,典型40w功耗;。

3D激光扫描仪介绍3D激光扫描仪是一种先进的扫描设备,能够以非接触的方式快速、高精度地获取物体表面的几何形状和颜色信息。
通过使用激光光束扫描目标物体,激光扫描仪可以生成点云数据,进而重建出目标物体的三维模型。
3D激光扫描仪在很多领域有广泛的应用,如工业制造、文化遗产保护、医疗领域等。
工作原理3D激光扫描仪的工作原理基于激光雷达技术。
它通过发射激光光束到目标物体上,并测量光线的反射时间来计算光线从发射到回收所经历的时间,从而确定物体表面各点的位置。
具体来说,激光扫描仪由激光发射器和接收器组成,发射器发出激光脉冲,接收器接收反射的激光,并记录反射时间。
通过测量光线的时间差和设备的几何关系,可以计算出目标物体上每个点的三维坐标。
应用领域1.工业制造:在工业制造过程中,3D激光扫描仪可以用于快速检测产品的形状、尺寸和表面质量。
它可以帮助检测和修复制造过程中的缺陷,提高产品的质量和生产效率。
2.文化遗产保护:3D激光扫描仪可以用于文物的数字化保护和展示。
通过扫描文物的表面,可以生成高精度的三维模型,帮助保存文物的形状和结构信息,并为后续的修复和展览提供参考。
3.医疗领域:在医疗领域中,3D激光扫描仪可以用于制作医疗器械和矫形器具等定制化产品。
通过扫描患者身体的部位,可以生成患者特定的三维模型,用于设计和制造适合患者需求的产品。
4.建筑和房地产:在建筑和房地产领域,3D激光扫描仪可以用于建筑物的测量和建模。
它可以帮助工程师和设计师准确地记录建筑物的尺寸和结构,并为后续的规划和设计提供参考。
优点和挑战3D激光扫描仪相较于传统的测量方法具有以下优点:1.非接触测量:激光扫描仪通过激光光束进行测量,不需要接触物体表面,可以避免因接触引起的形状畸变和表面破坏。
2.高精度:激光扫描仪能够以亚毫米的精度测量物体表面的形状和尺寸,可以获取非常精确的三维模型。
3.快速扫描:激光扫描仪能够快速地扫描物体表面,一般可以在几秒内完成一个扫描过程,大大提高了工作效率。
顾名思义,扫描仪就是用来对物体进行扫描的工具,通过扫描我们可以得到物体的成像。
但是其他产品和工具一样,扫描仪的种类也是多样的,并且不同种类的扫描仪特点和优势也各不相同。
今天我们就一起来了解一下在扫描领域比较先进的三维激光扫描仪。
下面将从不同类型的三维激光扫描仪有哪些特点和优势给大家进行简单的介绍。
三维激光扫描仪按照扫描成像方式的不同,激光扫描仪可分为一维(单点)扫描仪、二维(线列)扫描仪和三维(面列)扫描仪。
而按照不同工作原理来分类,可分为脉冲测距法(亦称时间差测量法)和三角测量法。
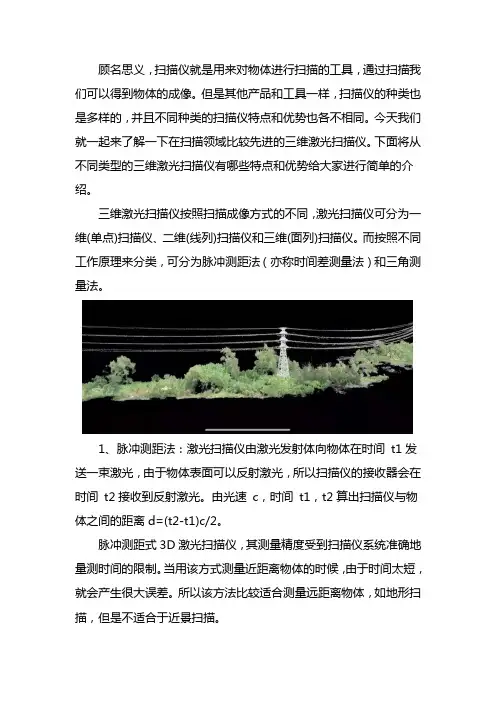
1、脉冲测距法:激光扫描仪由激光发射体向物体在时间t1发送一束激光,由于物体表面可以反射激光,所以扫描仪的接收器会在时间t2接收到反射激光。
由光速c,时间t1,t2算出扫描仪与物体之间的距离d=(t2-t1)c/2。
脉冲测距式3D激光扫描仪,其测量精度受到扫描仪系统准确地量测时间的限制。
当用该方式测量近距离物体的时候,由于时间太短,就会产生很大误差。
所以该方法比较适合测量远距离物体,如地形扫描,但是不适合于近景扫描。
2、三角测距法:用一束激光以某一角度聚焦在被测物体表面,然后从另一角度对物体表面上的激光光斑进行成像,物体表面激光照射点的位置高度不同,所接受散射或反射光线的角度也不同,用CCD (图像传感器)光电探测器测出光斑像的位置,就可以计算出主光线的角度θ。
然后结合己知激光光源与CCD 之间的基线长度d,经由三角形几何关系推求扫描仪与物体之间的距L≈dtanθ。
手持激光扫描仪通过上述的三角形测距法建构出3D图形:通过手持式设备,对待测物发射出激光光点或线性激光。
以两个或两个以上的侦测器测量待测物的表面到手持激光产品的距离,通常还需要借助特定参考点-通常是具黏性、可反射的贴片-用来当作三维扫描仪在空间中定位及校准使用。
这些扫描仪获得的数据,会被导入电脑中,并由软件转换成3D模型。
3、三角测量法的特点:结构简单、测量距离大、抗干扰、测量点小(几十微米)、测量准确度高。

三维激光扫描仪分类及原理地面三维激光扫描技术的出现是以三维激光扫描仪的诞生为代表,有人称“三维激光扫描系统”是继GPS (Global Position System)技术以来测绘领域的又一次技术革命。
三维激光扫描技术是一种先进的全自动高精度立体扫描技术,又称为“实景复制技术”,是继GPS空间定位技术后的又一项测绘技术革新,将使测绘数据的获取方法、服务能力与水平、数据处理方法等进入新的发展阶段。
传统的大地测量方法,如三角测量方法,GPS测量都是基于点的测量,而三维激光扫描是基于面的数据采集方式。
三维激光扫描获得的原始数据为点云数据。
点云数据是大量扫描离散点的结合。
三维激光扫描的主要特点是实时性、主动性、适应性好。
三维激光扫描数据经过简单的处理就可以直接使用,无需复杂的费时费力的数据后处理;且无需和被测物体接触,可以在很多复杂环境下应用;并且可以和GPS等集合起来实现更强、更多的应用。
三维激光扫描技术作为目前发展迅猛的新技术,必定会在诸多领域得到更深入和广泛的应用。
对空间信息进行可视化表达,即进行三维建模,通常有两类方法:基于图像的方法和基于几何的方法。
基于图像的方法是通过照片或图片来建立模型,其数据来源是数码相机。
而基于几何的方法是利用三维激光扫描仪获取深度数据来建立三维模型,这种方法含有被测场景比较精确的几何信息。
三维激光扫描仪的分类:三维激光扫描仪按照扫描平台的不同可以分为:机载(或星载)激光扫描系统、地面型激光扫描系统、便携式激光扫描系统。
三维激光扫描仪作为现今时效性最强的三维数据获取工具可以划分为不同的类型。
通常情况下按照三维激光扫描仪的有效扫描距离进行分类,可分为:(1)短距离激光扫描仪:其最长扫描距离不超过3m,一般最佳扫描距离为0. 6~1. 2 m,通常这类扫描仪适合用于小型模具的量测,不仅扫描速度快且精度较高,可以多达三十万个点精度至±0.018 mm。
例如:美能达公司出品的VIVID 910高精度三维激光扫描仪,手持式三维数据扫描仪FastScan等等,都属于这类扫描仪。

目前应用的三维激光扫描系统种类繁多,类型、工作领域不尽相同。
按照不同研究角度、工作原理可进行多种分类。
三维激光扫描系统从操作的空间位置可以划分为如下四类:(1)机载型激光扫描系统,这类系统在无人机或有人直升机上搭载,由激光扫描仪、成像装置、定位系统、飞行惯导系统、计算机及数据采集器、记录器、处理软件和电源构成,它可以在很短时间内取得大范围的三维地物数据。
(2)地面型激光扫描系统此种系统是一种利用激光脉冲对被测物体进行扫描,可以大面积、快速度、高精度、大密度的取得地物的三维形态及坐标的一种测量设备。
根据测量方式还可划分为两类一类是移动式激光扫描系统一类是固定式激光扫描系统。
所谓移动式激光扫描系统,是基于车载平台,由全球定位系统、惯性导航系统结合地面三维激光扫描系统组成。
固定式的激光扫系统,类似传统测量中的全站仪。
系统由激光扫描仪及控制系统、内置数码相机、后期处理软件等组成。
与全站仪不同之处在于固定式激光扫描仪采集的不是离散的单点三维坐标,而是一系列的“点云”数据。
其特点为扫描范围大、速度快、精度高、具有良好的野外操作性能.(3)手持型激光扫描仪此类设备多用于采集小型物体的三维数据,一般配以柔性机械臂使用。
优点是快速、简洁、精确。
适用于机械制造与开发、产品误差检测、影视动画制作与医学等众多领域。
(4)特殊场合应用的激光扫描仪,如洞穴中应用的激光扫描仪在特定非常危险或难以到达的环境中,如地下矿山隧道、溶洞洞穴、人工开凿的隧道等狭小、细长型空间范围内,三维激光扫描技术亦可以进行三维扫描。
三维激光扫描系统按照扫描仪的测距原理,又划分为如下三类:(1)使用脉冲测距技术。
其测距范围可达数百米,甚至上千米。
(2)基于相位测量原理。
主要用来进行中等距离的扫描测量,其扫描范围一般在米内,与采用脉冲测距原理的扫描设备相比,它的精度相对为高。
(3)基于光学的三角测量原理。
采用光学三角测量原理的扫描设备,一般工作距离较近,一般在数米数十米,主要应用于工程测量及逆向建模等工程中,可以达到很高的测量精度。
全球十大三维激光扫描仪品牌内容来源网络,由“深圳机械展(11万㎡,1100多家展商,超10万观众)”收集整理!更多cnc加工中心、车铣磨钻床、线切割、数控刀具工具、工业机器人、非标自动化、数字化无人工厂、精密测量、3D打印、激光切割、钣金冲压折弯、精密零件加工等展示,就在深圳机械展.面对市场上众多的扫描仪品牌与型号,是否让消费者们感到眼花缭乱呢?自从上世纪八十年代,Cyberware公司的人头三维扫描仪被成功用于影视特效制作开始,各大企业和研究机构纷纷在此领域投入人力、物力进行研究,并推出了自己的产品。
经过三十余年的发展,目前市面上能够见到的三维激光扫描仪品牌和型号有上百种,今天小编就从地面大空间三维扫描仪品牌中,选择有代表性的几种进行介绍。
1.Faro法如FARO focus x130 和x330纳斯达克上市的美国大牌企业,因为其产品的性价比、便携性和简单易用而成为应用范围广的扫描仪品牌。
扫描范围为中短距离。
从上世纪九十年代开始,在光学扫描仪普遍价格高昂的情况下,法如一直在设法开发性价比更高,实用性更强的产品。
早期Faro和Immersion 都以生产基于机械测量臂原理的三维设备而著称,两家公司还为专利打过官司,但现在FARO已在三维扫描仪市场打出一片天下,Immersion则默默无闻。
法如扫描仪公认轻巧方便,容易使用,性价比高。
2.Leica徕卡Leica C30/P40世界的仪器生产商,相信消费者都知道他家的相机。
瑞士的老牌企业,知名度高,当然价格一向也是很高的。
它的扫描范围为中短距离。
公认特点是个头大,物理性能好(能对抗恶劣天气,如严寒阴雨雾霾等)。
据说相对其他品牌而言也能抗摔,当然小编不认为有人会舍得摔这个东西。
3.Trimble天宝是GPS领域全球的品牌。
成立于1978年,产地美国,一直在开发GPS技术应用。
其三维扫描仪特点是GPS相关功能强大,GPS导航,精确授时,无线网同步等等。
三维激光扫描仪分类及原理
根据扫描原理和操作方式的不同,可以将三维激光扫描仪分为以下几类:
1.结构光扫描仪:结构光扫描仪通过投射光栅或编码器形成的结构光
条纹,来测量物体的表面形状。
它主要包括摄像头、光源和专业软件等组成。
在扫描过程中,光源发射光线,照射到物体表面后被摄像头捕捉到,
然后通过计算机处理,从而得到物体表面的三维坐标信息。
2.时间飞行扫描仪:时间飞行扫描仪使用脉冲激光器发射一束光,当
光束照射到物体上后,一部分光会被物体反射回来,接收器会记录返回的
光线的时间和强度信息。
通过测量光线往返的时间,可以计算出物体的距离。
时间飞行扫描仪具有较高的精度和快速扫描速度,适用于大范围的场
景测量。
3.相移扫描仪:相移扫描仪是一种通过利用相位差计算距离的扫描仪。
它通过发射不同相位的光束,在接收端通过计算两束光之间的相位差,从
而测量出物体的距离信息。
相移扫描仪具有高测量精度和较高的光照适应性,适用于颜色、反射率变化较大的物体测量。
4.激光雷达:激光雷达通过发射激光束,在物体表面上形成反射光斑,通过接收器接收返回的光强信号,通过测量光线的时间和波长,从而测量
出物体的位置和表面特征。
激光雷达具有高精度和远距离测量的能力,适
用于大范围的测量需求。
以上是几类常见的三维激光扫描仪。
不同的扫描原理和操作方式适用
于不同的测量场景和要求。
随着激光技术的不断发展,三维激光扫描仪在
工业、建筑等领域的应用前景也将越来越广阔。
3D扫描仪以其便捷、可逆、立体成像、精度高等特点越来越多的应用尺寸检测、3D建模、逆向、数字存档、GD&T分析、有限元分析、虚拟安装、干涉分析、工程测绘、形变检测、VR/AR、3D打印等各种领域。
目前行业内有拍照式3D扫描仪、手持式3D 扫描仪、桌面3D扫描仪、地面三维3D扫描仪、牙科3D扫描仪、彩色3D扫描仪……等应用于不同领域的3D扫描仪。
今天主要给大家介绍一下其中的手持3D扫描仪。
以下是一些在市场上应用的比较多,口碑比较好的手持三维扫描仪,希望对大家认识手持三维扫描仪有帮助。
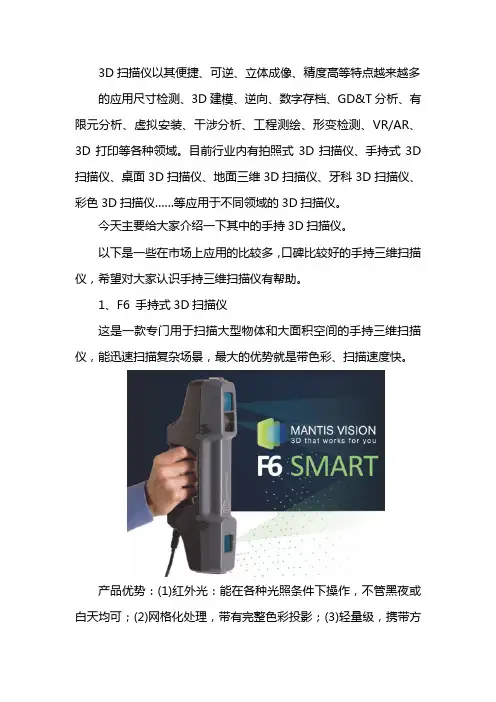
1、F6 手持式3D扫描仪这是一款专门用于扫描大型物体和大面积空间的手持三维扫描仪,能迅速扫描复杂场景,最大的优势就是带色彩、扫描速度快。
产品优势:(1)红外光:能在各种光照条件下操作,不管黑夜或白天均可;(2)网格化处理,带有完整色彩投影;(3)轻量级,携带方便;(3)无需场景准备,凭借物体几何形状编码,可在复杂环境中工作(4)双重操作模式:静态和动态;(5)可拍摄隐蔽或难以到达的地方;(6)带有热靴连接,用于多个F6的无线同步以捕捉动态目标、闪光灯;(7)可拼接多个来自不同扫描的模型;(8)多重显示界面:平板电脑/笔记电脑/虚拟现实设备该设备带色彩、扫描速度快2、HandySCAN手持激光三维扫描仪——适合工业用HandySCAN BLACK 便携式手持三维激光扫描仪是CREAFORM2019年新推出的工业级三维扫描仪,该产品获得了2019年红点奖。
其将专有的高性能3D 扫描与经优化的光学技术、多束蓝色激光技术以及人体工学设计结合起来,使其高精度的优势脱颖而出,适用于工业领域的逆向工程和质量检测。
产品优点:【便捷性】由于是手持扫描,新款的HANDYSCAN BLACK 仅为0.94KG,因此可以轻松带到任何地点扫描,同时也可伸入到狭小空间扫描。
【4X 分辨率】其经优化的高性能光学技术和蓝色激光技术的专属多效组合,可实现精巧细节和大体积数据的采集。
三维激光扫描仪原理
三维激光扫描仪是一种能够快速获取物体表面三维形状信息的高精度测量设备。
它通过激光束在物体表面的反射和回波信号的接收,实现对物体表面的高精度扫描和测量。
三维激光扫描仪的工作原理是基于激光测距技术和三角测量原理,通过激光束的发射和接收,计算出物体表面各点的三维坐标信息,从而实现对物体表面的快速、精确的三维测量。
首先,三维激光扫描仪通过发射激光束照射到物体表面,激光束在物体表面被
反射后,激光束的回波信号被接收器接收到。
接收器接收到回波信号后,根据激光束的发射和接收时间,计算出激光束从发射到接收的时间差,再根据光速和时间差计算出激光束在空间中的传播距离。
其次,三维激光扫描仪通过三角测量原理计算出物体表面各点的三维坐标信息。
三角测量原理是利用已知的一条边和两个角或者两条边和一个角来确定一个三角形的大小和形状。
在三维激光扫描仪中,激光束的发射点、接收点和物体表面上的点构成一个三角形,通过测量激光束的发射点和接收点的坐标,以及激光束在空间中的传播距离,就可以计算出物体表面上各点的三维坐标信息。
最后,三维激光扫描仪通过对物体表面上各点的三维坐标信息进行采集和处理,生成物体的三维模型。
在采集和处理过程中,需要考虑到激光束的发射和接收精度、扫描速度、采样密度等因素,以确保生成的三维模型具有高精度和高质量。
总的来说,三维激光扫描仪的工作原理是基于激光测距技术和三角测量原理,
通过激光束的发射和接收,计算出物体表面各点的三维坐标信息,从而实现对物体表面的快速、精确的三维测量。
三维激光扫描仪在工业制造、建筑测量、文物保护、数字化设计等领域有着广泛的应用前景,是一种非常重要的测量设备。
三维扫描仪通过扫描收集到的这些三维数据具有相当广泛的用途,工业设计、瑕疵检测、逆向工程、机器人导引、地貌测量、医学信息、生物信息、刑事鉴定、数字文物典藏、电影制片、游戏创作素材等等都可见其应用。
不同使用场景的三维扫描设备,差异是很大的。
下面给大家介绍一下三维扫描仪的分类和一些常见的型号。
以下是一些常见型号的三维扫描仪产品。
一、地面三维激光扫描仪地面三维扫描仪适用于几米到几百上千米的空间范围,精度一般是毫米级,在建筑、数字化工厂、公共安全等行业较为适用。
目前比较有名的地面三维扫描设备有Faro 法如,Trimble天宝,徕卡等,不同品牌各有千秋,我这边大致阐述一下。
法如FARO 手持三维扫描仪,是美国Faro公司的产品,品牌知名度高,产品优点在于设备很小很轻,大小仅有24厘米x 20厘米x 10厘米,重量仅有4.2公斤。
非常便于在复杂的环境下移动和安置。
而且其内置彩色相机可提供高达1亿6千5百万像素的无视差彩色叠加。
最终结果可得到精细照片级三维彩色影像。
还有一个优点是在阳光直射下,可高速远距离扫秒,例如Faro Focus S350,扫描距离一站可以达到350米,而且利用其所集成的GPS接收器,能够使每一次扫描与后处理相关联。
Faro这系列地面三维激光扫描仪降低了外业工作的强度,同时该设备的价格较有竞争力。
美国天宝Trimble地面三维扫描仪,较之于Faro来说略大,也是厘米级的精度,主机尺寸为335 mm宽x 386 mm 高x 242 mm 深,重量为10.7公斤(含三角基座不含电池)。
凭借天宝专利的Lightning闪电技术,在其整个测程范围内,TX8都可以每秒1百万个精确激光点的速度获取数据。
天宝的Lightning技术很少受到表面类型和大气条件变化的影响,所以可从每个测站中获得完整性的数据集。
二、低精度手持三维扫描仪这种三维扫描仪比较新兴,市场上同类型的产品很少。
比较出名的是MV F6手持式3D扫描仪,这款扫描仪使用红外光,专门用于扫描几十厘米到几米的大型物体和大面积空间,能迅速扫描复杂场景。
三维激光扫描知识点总结一、三维激光扫描的工作原理三维激光扫描是通过激光束对物体进行高速扫描,然后根据激光束反射的时间和方向,计算出物体表面的三维坐标信息。
其工作原理可以概括为以下几个步骤:1. 发射激光束:激光扫描仪通过发射激光束来对物体进行扫描。
激光束的大小和方向可以通过控制仪器的参数进行调节。
2. 接收反射信号:激光束照射在物体表面后,会反射回扫描仪的接收器上。
接收器会记录激光束反射的时间和方向。
3. 计算三维坐标:根据激光束的发射时间和接收时间,以及激光束的方向,可以计算出物体表面的三维坐标信息。
4. 构建点云模型:将计算得到的三维坐标信息整合起来,就可以构建出物体的三维点云模型。
这个过程需要对大量的数据进行处理和分析。
5. 生成三维模型:根据点云模型,可以生成物体的三维模型。
这个过程可以通过计算机软件来实现,也可以通过3D打印来实现。
二、三维激光扫描的应用领域三维激光扫描技术具有高精度、高效率和非接触性的特点,因此在各个领域都得到了广泛的应用。
1. 建筑和土木工程:三维激光扫描可以用于建筑物的设计和施工监测,包括建筑结构的检测、地形地貌的勘测、室内外环境的建模等。
2. 制造业:三维激光扫描可以在制造过程中用于快速测量物体的尺寸和形状,包括零部件的尺寸检测、质量控制、逆向工程等。
3. 文物保护:三维激光扫描可以用于对文物和古迹的三维数字化和保护,包括建筑物的修复、雕塑的复制、考古遗址的记录等。
4. 地质勘探:三维激光扫描可以用于对地形和地貌的三维采集,包括矿山的勘探、地质灾害的监测、地质构造的研究等。
5. 医学领域:三维激光扫描可以用于医学影像的三维重建和分析,包括医学影像的诊断、手术模拟、义肢定制等。
6. 航空航天:三维激光扫描可以用于对航空航天器件和构件的三维测量和检测,包括飞行器的结构分析、航天器的装配等。
三、三维激光扫描的技术发展随着科学技术的不断进步,三维激光扫描技术也在不断发展和完善。
3d扫描技术3D扫描属于逆向工程(Reverse Engineering)的一种,通过扫描产品实物的3D外形来获取原本不公开的数字化设计3D模型。
因此这可能会涉及到版权问题,比如厂商通过3D扫描逆向取得产品的设计图纸后生产,以获取商业利益。
3D扫描技术可广泛应用于考古、汽车制造、工业检验、医疗等行业,以提高生产效率。
三维扫描仪的发展历程:一代三维扫描仪:点测量。
点测量三维扫描仪通过每一次的测量点来获得物体的表面特征。
精度高,但速度慢,通常用于物体表面的误差检测。
代表系统有:固定式三坐标测量机、便携式关节臂测量机、点激光测量仪。
便携式关节臂测量机:二代三维扫描仪:线扫描。
通过一段激光线照射到物体表面,再通过传感器获取物体表面的三维信息。
手持式激光扫描仪非常便携,若采用普通的激光线则精度较低,但是成本低,可以以很低的成本来搭建多条激光线组对3D物体实现多方位的扫描。
代表系统:台式三维激光扫描仪、手持式三维激光扫描仪。
手持式三维激光扫描仪:三代三维扫描仪:面扫描通过一组光栅的位移,再通过传感器来获取物体表面的数据信息。
面扫描一般采用投影仪(如高压汞灯的灯泡光源UHP)发出的白光来扫描。
相比于线扫描,面扫描速度更快、精度更高。
对于大型物体的测量,结构光要借助于摄影测量系统(如分段测量)来完成,扫描范围可到10m,两天时间就可以完成整车的内外表面扫描。
缺点是适合表面起伏不大、较为平坦的物体,对于表面凹凸不平的物体,扫描难度较高。
在扫描过程中,每次扫描会有物体一个侧面的形状,然后将物体转动一个角度后再扫描新的侧面,直到会有物体360°各个方位的形状。
每两次扫描之间要保证有重叠的部分,以便于将两个侧面拼接起来。
为了便于拼接,有时需要在物体上随机贴上标记点(Marker)。
代表系统:“拍照式”(光栅)结构光三维扫描仪、三维摄影测量系统。
另外威布三维也研发出了能够实现面扫描的手持式三维激光扫描仪。
新式扫描仪:红外激光扫描仪。
测绘测量革命性产品美国Surphaser三维激测绘测量革命性产品-----美国Surphaser三维激光扫描仪00一、三维激光扫描技术简介1 三维激光扫描仪原理与应用1.1三维激光扫描仪原理三维激光扫描仪主要由激光发射器、接收器、时间计数器、马达控制可旋转的滤光镜、控制电路板、微电脑和软件等组成。
激光脉冲发射器周期地驱动激光二极管发射激光脉冲,由接收透镜接受目标表面后向反射信号,产生接收信号,利用稳定的石英时钟对发射与接收时间差作计数,最后由微电脑通过软件,按照算法处理原始数据,从中计算出采样点的空间距离;通过传动装置的扫描运动,完成对物体的全方位扫描;然后进行数据整理从而获取目标表面的点云数据。
1.2三维坐标确定方法1.3 三维激光扫描仪应用量化实景对象、三维信息采集、逆向三维重构、逆向三维建模空间数据反求、对象逆程设计、预研仿研仿制、虚拟现实应用正向工程反证、逆向工程实施、概念设计仿真、逆向制图还原结构特性分析、试验工程仿真、后数据测计量、目标形变监测工程技效评估、电脑模拟实战、环境适应仿真、工程力学分析对抗模拟推演、企业无纸操作、虚拟设计制造、科目效果测试整合三维资源、创建三维流程、工装工艺规划、改进改造工程历史资源修复、任务方案优化、对象加载仿真、设施维护维修应用领域:包括:核电站,文物,考古,建筑业,航天,航空,船舶,制造,军工,军事,石化,医学,水利,能源,电力,交通,机械,影视,教学,科研,汽车,公安,市政建设......2 点云数据处理与建模2.1 点云的预处理由于扫描过程中外界环境因素对扫描目标的阻挡和遮掩,如移动的车辆、行人树木的遮挡,及实体本身的反射特性不均匀,需要对点云经行过滤,剔除点云数据内含有的不稳定点和错误点。
实际操作中,需要选择合适的过滤算法来配合这一过程自动完成。
2.2 点云配准使用控制点配准,将点云配准到控制网坐标系下;靶标缺失的点云,利用公共区域寻找同名点对其进行两两配准,当同名点对不能找到时,利用人工配准法。