三维激光扫描仪(VZ-400)
- 格式:ppt
- 大小:3.33 MB
- 文档页数:35
使用三维激光扫描仪进行视觉测量随着科技的不断进步,三维激光扫描仪作为一种高精度、非接触式的测量设备,被广泛应用于各个领域。
它能够以快速、准确的方式获取物体表面的三维信息,为工程师和设计师提供宝贵的数据支持。
本文将通过对三维激光扫描仪的介绍以及其在不同领域中的应用,探讨其所带来的革命性变化。
首先,我们来了解一下三维激光扫描仪的基本原理。
该设备通过向目标物体表面投射激光束,然后测量激光束经过反射后的信息,从而建立起目标物体的三维模型。
其测量原理主要基于激光束的时差测量或相移测量,借助高速计算机和专业软件的支持,可以实现高精度的测量。
三维激光扫描仪具有许多独特的优点,使其在各个领域受到广泛的应用。
首先,它具备非接触式测量的能力。
相比传统的测量方法,如刻度尺、百分表等,激光扫描仪不需要直接接触物体即可进行测量,避免了物体表面的磨损和形变,保护了物体的完整性。
其次,三维激光扫描仪具备高速测量的特点。
它能够在短时间内快速获取物体的三维数据,大大提高了测量效率。
在工业生产线上,激光扫描仪可以实时监测产品质量,实现自动化生产,进一步提升了工业的生产效率。
此外,三维激光扫描仪具备高精度的测量能力。
通过精确的测量,它可以获取物体表面的微小变形、裂纹、凹凸等细节信息,为工程师和设计师提供准确的数据支持。
在制造业领域,激光扫描仪被广泛应用于产品设计、质量控制等方面。
除了工业领域,三维激光扫描仪还在文化艺术、建筑设计等领域有着广泛的应用。
例如,在文化保护和修复中,激光扫描仪可以帮助专家获取文物表面的精细数据,保护文化遗产的完整性。
在建筑设计中,激光扫描仪可以获取建筑物的实际尺寸以及精确的地形地貌数据,辅助设计师进行规划和设计。
此外,三维激光扫描仪还在医疗领域有着广泛的应用。
在口腔正畸领域,激光扫描仪可以帮助医生获取患者的牙齿模型,辅助进行牙齿矫正。
在外科手术中,激光扫描仪可以通过获取患者身体的三维信息,为医生提供准确的解剖结构,提高手术的安全性和精确性。
三维激光扫描仪参数设置指南1. 前言嘿,朋友们!今天咱们来聊聊三维激光扫描仪,听起来高大上对吧?别担心,我们会把这个复杂的东西说得简单易懂。
就像喝水一样,轻轻松松就能搞定!那么,准备好了吗?咱们开始吧!2. 了解三维激光扫描仪2.1 什么是三维激光扫描仪?三维激光扫描仪就像你手里的“魔法相机”,它能瞬间把现实世界的三维数据记录下来。
你只需把它摆好,轻轻一按,咔嚓,整个场景都在它的“脑海”里了。
这就像你拍照一样,不过这个相机可不简单,能捕捉到更详细的深度信息,帮你生成超精准的三维模型。
2.2 用途有哪些?说到用途,那可是多得数不清!不管是建筑设计、文化遗产保护,还是工业测量,三维激光扫描仪都能派上大用场。
想象一下,在一个古老的寺庙里,扫描一下就能完美记录下所有细节,真是太酷了吧!而且,未来再复原的时候就方便多了,简直就是时间旅行者的必备良品!3. 参数设置的基本要领3.1 扫描模式的选择好啦,进入正题,咱们得开始调整参数了。
首先,要选择合适的扫描模式。
这里有几个常见的选择:快速模式、高清模式和室内/室外模式。
快速模式适合赶时间的朋友,反正结果也不要求太精细;高清模式呢,就像你的高清电视,细节满满,适合那些喜欢“看得仔细”的人。
室内和室外模式各有千秋,别搞混了哦!在室内扫描时,光线和反射会影响结果,得小心翼翼。
而室外就更要考虑天气情况,风一吹,数据可就飞了!3.2 分辨率与扫描范围接下来,咱们得聊聊分辨率和扫描范围。
这两个参数就像是给你的激光扫描仪穿衣服,得根据需求来选择。
分辨率越高,数据越细致,但扫描速度可能就会慢一些。
而扫描范围就像你拉开窗帘,看得越远,越能看到大千世界。
要是你只想扫描个小房间,范围就没必要设得太大,省电又省时间。
不过,记得适度哦,别像拿着放大镜看蚂蚁,哈哈!4. 实际操作小技巧4.1 数据存储与管理嘿,朋友们,数据存储也很重要!扫描完成后,数据会像一堆小星星,得好好管理。
建议你用外接硬盘,确保数据不丢失。

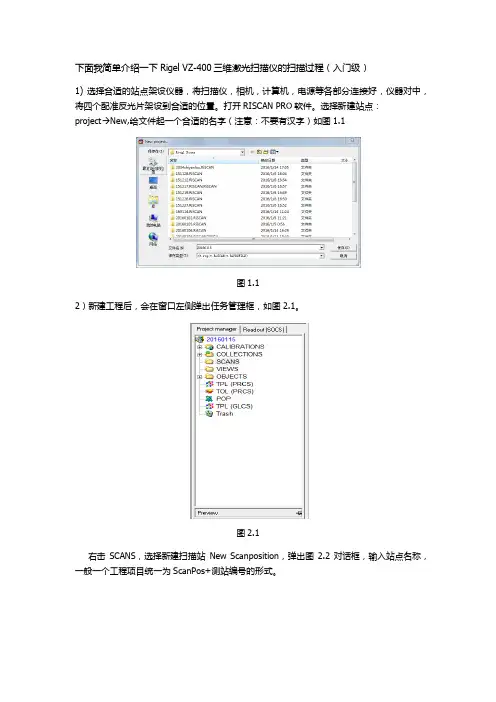
下面我简单介绍一下Rigel VZ-400三维激光扫描仪的扫描过程(入门级)1) 选择合适的站点架设仪器,将扫描仪,相机,计算机,电源等各部分连接好,仪器对中,将四个配准反光片架设到合适的位置。
打开RISCAN PRO软件。
选择新建站点:project New,给文件起一个合适的名字(注意:不要有汉字)如图1.1图1.12)新建工程后,会在窗口左侧弹出任务管理框,如图2.1。
图2.1右击SCANS,选择新建扫描站New Scanposition,弹出图2.2对话框,输入站点名称,一般一个工程项目统一为ScanPos+测站编号的形式。
图2.2点击OK,则在SCANS文件目录下,建立新的扫描站点文件,如图2.3图2.33)右键单击新建的ScanPos001站点,选择New single scan,弹出对话框图3.1图3.1单击Panorama(全景扫描),设置全景扫描参数,将Resolution[deg]分辨率改为合适的数值。
(校园三维模型建设我们用的是0.1的分辨率,我觉得这里跟点云的采集频率有关,直接影响采集数据量的大小),改为0.1后,点击右边”=”,此时Est.time估计扫描时间为1’26’’在右下角勾选Image acquisition,这样在全景扫描完后,相机会自动拍摄相片。
设置完成后,点击OK,弹出configuration扫描仪当前配置框,点击OK,扫描仪开始工作,进行全景扫描。
图3.24)全景扫描和影像获取结束后,就要开始对四个反光片进行精扫。
右击扫完后新生成的点云文件,例如图4.1中的160101_170812形式的文件。
图4.1选择Find reflectors,寻找反射片。
如图4.2图4.2在name prefix出更改合适的名称前缀,点击OK 。
图4.2之后点击Arrange windows vertically图标,将窗口按列排列,如图4.3图4.3将右侧2D视图最大化,点击Show/hide all tie points ,选择Show TPL SOCS显示反光片.视图中除安置的四个反光片之外的强反射处都是多余的,要删除这些多余的强反光处,才可以进行反光片精扫工作。
利用三维激光扫描探测建筑物裂缝的方法研究摘要:本文首先介绍了VZ-400三维激光扫描仪的工作原理,再从实验的角度分析建筑物裂缝宽度、深度、走向以及仪器扫描视角等各项技术参数对探测的影响,将理论模型与实验成果相比较,通过分析实验结果,修正裂缝探测的理论模型,从而得到一个较为准确的理论模型。
关键词:三维激光扫描仪;建筑物裂缝1研究背景若发现建筑物有裂缝,应立即对裂缝进行观测,测定建筑物上的裂缝分布位置,裂缝的走向、长度、宽度及其变化程度。
以便根据这些资料分析其产生裂缝的原因以及它对建筑物安全的影响,及时地采取有效措施加以处理。
对于数量不多,易于量测的裂缝,可视标志型式不同,用小钢尺或游标卡尺等工具定期量出标志间距离求得裂缝变位值,或用方格网板定期读取“坐标差”计算裂缝变化值;对于较大面积且不便于人工量测的众多裂缝宜采用近景摄影测量方法;当需连续监测裂缝变化时,还可采用测缝计或传感器自动测记方法观测。
三维激光扫描技术作为一项新兴的测量技术,与传统测量手段相比具有自动化测量、测量速度快、穿透性强、精度高、非接触式测量、特别适合表面复杂物体及其细节的测量以及可以建立目标三维模型等特点。
激光扫描在变形监测领域中有着广泛的应用,利用激光扫描仪探测建筑裂缝是变形监测领域的新课题。
但大多数只对裂缝探测提出一个定性的描述,而没有对具体的探测条件做一个定量分析,因此,这一方面还有大量值得我们研究的内容。
2激光扫描仪的测量原理及数据处理2.1激光扫描仪的测量原理一套完整的三维激光扫描系统由扫描仪、控制中心、电源组成。
三维激光扫描仪的测量介质是由自身发射的一组激光束,该系统包括激光测距系统和激光扫描系统,仪器以极高的速度发射激光束,按照一定顺序扫描观测区域,然后返回包括距离、天顶距、斜率和反射率等信息,通过这些信息,仪器便可测出被测物体某一点的三维坐标信息。
通过对采集到的所有三维坐标信息进行排序整理,即可得到三维激光扫描的成果,即点云。
三维激光扫描仪原理
三维激光扫描仪是一种利用激光技术对物体进行三维扫描的设备,它能够快速、精确地获取物体表面的三维形状信息,被广泛应用于工业设计、文物保护、医学影像等领域。
其原理主要包括激光发射、光束聚焦、光斑定位、数据采集和数据处理等环节。
首先,激光扫描仪通过激光器发射一束单色、准直的激光光束,然后利用光学
系统对激光光束进行聚焦,使其成为一束细小的光斑。
这个过程需要确保激光的稳定性和光斑的清晰度,以保证后续扫描的准确性和精度。
接着,光斑被照射到待扫描物体的表面,光斑在物体表面投射出一个二维的图像,激光扫描仪通过控制光斑的移动和旋转,可以扫描整个物体表面,并且在扫描的同时记录下光斑的位置信息。
这个过程需要激光扫描仪具备高速、高精度的运动控制系统,以确保光斑的定位和扫描的连续性。
随后,激光扫描仪将记录下的光斑位置信息转化为数字信号,并通过高速数据
采集系统进行采集和存储。
在数据采集过程中,需要考虑信噪比、采样率、数据传输速度等因素,以保证采集到的数据具有足够的准确性和完整性。
最后,激光扫描仪利用数据处理软件对采集到的数据进行处理和重建,通过三
维重建算法将二维的光斑图像转化为物体表面的三维点云数据,然后根据点云数据生成三维模型。
在数据处理的过程中,需要考虑数据配准、滤波、拼接、曲面重建等算法,以获取高质量的三维模型数据。
综上所述,三维激光扫描仪通过激光发射、光束聚焦、光斑定位、数据采集和
数据处理等环节,实现了对物体表面的快速、精确扫描,为工业设计、文物保护、医学影像等领域的应用提供了重要的技术支持。
随着激光技术的不断发展和进步,相信三维激光扫描仪在未来会有更广阔的应用前景。
三维激光扫描仪的使用教程及效果展示现如今,随着科技的不断进步与发展,我们生活的方方面面都得益于现代科技的蓬勃发展。
其中,三维激光扫描仪作为一种先进的测量工具,正在被广泛应用于各行业中。
本文将为您详细介绍三维激光扫描仪的使用教程,并通过实际案例展示其出色的效果。
一、三维激光扫描仪简介三维激光扫描仪是一种使用激光测距原理进行三维信息采集与处理的仪器。
它通过发射激光束来扫描物体表面,通过接收激光反射回来的信号来测量物体的位置与形状,从而实现对物体的全方位测量与重建。
相比传统的测量工具,三维激光扫描仪具有测量速度快、精度高、操作简便等优势,被广泛应用于建筑、工程、制造、文化遗产保护等领域。
二、三维激光扫描仪的使用教程1. 准备工作在使用三维激光扫描仪之前,首先需要进行一些准备工作。
确保仪器处于正常工作状态,检查扫描仪的设备连接,确保电源充足,以便正常进行扫描操作。
另外,还需选择合适的扫描场景与扫描模式,根据实际需求确定扫描范围与精度。
2. 扫描操作开始扫描之前,我们需要将三维激光扫描仪放置在固定位置,并确保其稳定。
接着,在扫描软件中设置扫描参数,例如分辨率、角度等。
然后,根据扫描仪的指示,将激光束对准目标物体进行扫描。
在扫描过程中,需保持稳定的手持,保持扫描过程的连贯性和准确性。
3. 数据处理与重建一旦扫描完成,我们可以将扫描的数据导入到计算机中进行进一步处理与重建。
主要的数据处理步骤包括点云配准、深度图像处理、三维模型生成等。
通过配准技术,可以将多次扫描的数据进行对齐,形成一个完整的三维模型。
根据实际需求,可以对三维模型进行编辑、修复、优化等操作,以得到更加精确的模型。
三、三维激光扫描仪的效果展示随着三维激光扫描仪的普及与应用,其出色的效果也逐渐展现出来。
下面将通过几个实际案例展示三维激光扫描仪的应用效果。
1. 建筑测量与设计三维激光扫描仪可以快速准确地获取建筑物的外部结构与内部空间信息,方便进行建筑测量与设计。
激光三维扫描仪同于三维扫描仪一样,都是一种科学仪器,用于侦测并分析现实世界中物体或环境的形状(几何构造)与外观数据(如颜色、表面反照率等性质。
那么激光三维扫描仪的特点及其优势你了解吗?激光三维扫描仪的特点非接触测量即对扫描目标物体无需进行任何表面处理,直接采集物体表面的三维数据。
可以用于解决危险目标、环境(或柔性目标)及人员难以企及的情况,具有传统测量方式难以完成的技术优势。
数据采样率高目前,采用脉冲激光或时间激光的三维激光扫描仪采样点速率可以达到数千点/秒,而采用相位激光方法测量的三维激光扫描仪甚至可以达到数十万点/秒。
主动发射扫描光源即激光通过探测自身发射的激光回波信号来获取目标物体的数据信息。
因此在扫描过程中,可以不受扫描环境的时空约束进行测量。
高分辨率、高精度三维激光扫描技术可以快速、高精度的获取海量点云数据,可以对扫描目标进行高密度的三维数据采集,从而达到高分辨率的目的。
数字化采集、兼容性好三维激光扫描技术所采集的数据是直接获取的数字信号,具有全数字特征,易于后期处理及输出。
能够与其它常用软件进行数据交换及共享。
这些功能大大扩展了三维激光扫描技术的使用范围,使对信息的获取更加全面、准确。
外置数码相机,可增强彩色信息的采集;结合GPS定位系统,可进一步提高测量数据的准确性。
激光三维扫描仪的优势:三维激光扫描仪(3Dscanner)作为一种科学仪器,可用来探测并分析现实世界中物体的三维形状。
其在工业设计、逆向工程、机器人导航、医疗检查、刑事鉴定、文物保护、电影制片、游戏创作等众多领域中都有应用。
三维激光扫描技术又被称为实景复制技术,是测绘领域继GPS技术之后的一次技术革命。
它突破了传统的单点测量方法,具有高效率、高精度的独特优势.三维激光扫描技术能够提供扫描物体表面的三维点云数据,因此可以用于获取高精度高分辨率的数字地形模型。
在三维激光扫描系统使用中,如何解决对应问题,即如何确定左右两幅图像中的两个像点是物体表面同一物点所成成为主要关注的课题。

一、叠加照片1、打开工程文件project.rsp2、将ScanPos003目录下的ScanPos003_001和ScanPos003_002拖动到同一个窗口显示,选择“3D”模式,采用True color下的Linear scaled;3、右键点击ScanPos003_001 →点击Color from images…会自动选择已有的相对应照片→点击OK,在目录上会生成一个Color_ScanPos003_ScanPos001文件,然后打开此文件,显示贴片效果如下图二、反射片拼接1、初始化:双击转换矩阵SOP,右键单击数字框,初始化矩阵“Set default”右键单击ScanPos003,将Registered的勾去掉2、关联大地坐标:双击总目录的TPL(GLCS),在弹出的窗口点击Import tiepointlis…选择导入的坐标点数据,右键点击Copy tiepointlist to…下的TPL PRCS,是数据复制到TPL(PRCS)3、反射片拼接:双击打开ScanPos003目录下的TPL(SOCS),点击Find corresponding points…然后在打开的窗口中修改参数,精度Tolerance[m]:0.1,最小反射片数Minimum N:3 ,然后点击Start,下一步OK双击ScanPos004的TPL(SOCS),点击Find corresponding points…,同时勾选ScanPos003,修改参数后点击Start,最后点击OK,至此反射片拼接完成,效果如下图:4、坐标拼接——五羊雕塑1)打开project.rsp2)初始化:双击POP,在打开的数字框按右键,点击Set default;然后双击ScanPos001、ScanPos002、ScanPos003、ScanPos004的SOP,在打开的数字框右键点击Set default。
3)双击TPL(GLCS),先删除遗留数据,然后点击Import tiepointlist导入坐标点文件,在弹出的对话框选择文件类型,选择“测量控制点坐标.csv”文件打开,在弹出的对话框匹配对应好X、Y、Z坐标,点击OK,这样控制点坐标就被导入了工程4)双击ScanPos001的TPL(SOCS),在弹出的对话框点击“Find corresponding points…”,修改参数0.5、3,点击Start →OK,将ScanPos001拼接到工程;5)同理处理ScanPos002、ScanPos003、ScanPos004,在拼接时同时勾选ScanPos001,将全部都拼接到ScanPos001,然后将4个反射片坐标拼接的效果显示如下图:三、后视拼站——矿山1、打开project.rsp2、双击POP,初始化“Set default”,3、双击TPL(GLCS),在弹出的对话框删除遗留的数据,然后点击,选择“GPS坐标.csv”打开,在弹出的对话框匹配对应好X、Y、Z坐标,点击OK,这样后视控制点坐标就导入了工程里面;4、右击ScanPos001下的SOP,选择“Backsighting orientation…”,在弹出的对话框中的Instrument height[m]输入仪器高1.7,点击Use GLCS tiepoint,选择c1,点击OK →next点击Use GLCS tiepoint,选择h1,点击OK →next点击“Use tiepoint [finescanned]”,再点击“Select tiepoint”,选择反射片“SOCS_001”,点击OK点击next →Set SOP →Cancel →Close5、同理处理ScanPos002、ScanPos003,分别选择c2、h2和c3、h3,仪器高均为1.7,反射片分辨是SOCS_046和SOCS_1161,最后显示效果图:四、手动拼站——操作视频071、打开project.rsp2、双击打开SCANS目录下ScanPos01的Color_ScanPos01-panorama和ScanPos02的Color_ScanPos02-panorama,True Color显示,然后点击Arrange windows vertically,双屏显示两个窗口;3、点击Registration →Coarse registration,在弹出的对话框中点击View A的选项框,然后点击01窗口的图上,定义View A;同理定义View B(02)4、在01上找到第一个匹配点,按住shift,点击第一个点,在02找到相同位置的点,同样按住shift 点击,然后点击对话框的“Add point pair”,在对话框显示生成第一个匹配点。
测绘测量革命性产品美国Surphaser三维激测绘测量革命性产品-----美国Surphaser三维激光扫描仪00一、三维激光扫描技术简介1 三维激光扫描仪原理与应用1.1三维激光扫描仪原理三维激光扫描仪主要由激光发射器、接收器、时间计数器、马达控制可旋转的滤光镜、控制电路板、微电脑和软件等组成。
激光脉冲发射器周期地驱动激光二极管发射激光脉冲,由接收透镜接受目标表面后向反射信号,产生接收信号,利用稳定的石英时钟对发射与接收时间差作计数,最后由微电脑通过软件,按照算法处理原始数据,从中计算出采样点的空间距离;通过传动装置的扫描运动,完成对物体的全方位扫描;然后进行数据整理从而获取目标表面的点云数据。
1.2三维坐标确定方法1.3 三维激光扫描仪应用量化实景对象、三维信息采集、逆向三维重构、逆向三维建模空间数据反求、对象逆程设计、预研仿研仿制、虚拟现实应用正向工程反证、逆向工程实施、概念设计仿真、逆向制图还原结构特性分析、试验工程仿真、后数据测计量、目标形变监测工程技效评估、电脑模拟实战、环境适应仿真、工程力学分析对抗模拟推演、企业无纸操作、虚拟设计制造、科目效果测试整合三维资源、创建三维流程、工装工艺规划、改进改造工程历史资源修复、任务方案优化、对象加载仿真、设施维护维修应用领域:包括:核电站,文物,考古,建筑业,航天,航空,船舶,制造,军工,军事,石化,医学,水利,能源,电力,交通,机械,影视,教学,科研,汽车,公安,市政建设......2 点云数据处理与建模2.1 点云的预处理由于扫描过程中外界环境因素对扫描目标的阻挡和遮掩,如移动的车辆、行人树木的遮挡,及实体本身的反射特性不均匀,需要对点云经行过滤,剔除点云数据内含有的不稳定点和错误点。
实际操作中,需要选择合适的过滤算法来配合这一过程自动完成。
2.2 点云配准使用控制点配准,将点云配准到控制网坐标系下;靶标缺失的点云,利用公共区域寻找同名点对其进行两两配准,当同名点对不能找到时,利用人工配准法。
地面三维激光扫描系统VZ400操作规程
一、独立操作人员必须经过技术培训考试合格后方可上岗操作。
二、扫描仪附带电池需要定期充电,以延长电池的使用寿命,而且扫描仪在不使用时,应放置于所配备仪器箱中,以保证安全。
三、扫描仪连接外部电源前,在确认电源的极性和电压值后方可连接电源。
四、在将扫描仪放置于三角脚架上前,要保证三脚架稳定性,而且基座和扫描仪连接部要卡紧,避免脚架滑动而导致意外。
五、扫描仪在整平过程中,应该保持关机状态,严禁开机后整平Q六、扫描仪的工作环境温度应在仪器限定范围内,避免在过高或过低温度下工作造成元件损坏。
七、定期备份和清理扫描仪内置存储器的数据,以保证扫描仪野外工作的连续性。
八、扫描仪所配置靶标在扫描完毕后,应及时回收,避免靶标丢失。
九、扫描仪在工作期间不得断电,注意检查电源进、出线,防止线路短路、断路。
在进行野外扫描时,应选择稳定,安全的地点安置扫描仪。
十、在长距离运输和移动扫描仪过程中,需将扫描仪放置于所配备仪器箱中,在运输中要确保避免大的震动。
十一、扫描仪应专人保管和使用;使用中出现问题,应及时报告,按指示进行处理,不得擅自处理,并且对问题和处理要做记录。
十二、扫描仪需进行定期检校,对不符合要求的指标项目,应进行检校调
整。
Riegl VZ—400三维激光扫描仪在沈抚新城生命之环城市标志性构筑物垂直度、挠度测量上的应用作者:隋正苏来源:《中华建设科技》2013年第05期【摘要】三维激光扫描技术是近年来发展起来的一门新技术,其在众多领域中有非常广阔的应用前景。
本文介绍了三维激光扫描仪目前的应用现状,以及原理和数据后处理方法。
最后通过沈抚新城生命之环城市标志性构筑物垂直度、挠度测量上的应用实例叙述了Riegl VZ-400扫描仪如何获取数据、点云数据的拼接及三维模型的建立。
【关键词】三维激光扫描仪;数据获取;点云拼接;三维建模;挠度1. 引言(1)三维激光扫描技术[1]是一门新兴的测绘技术,它实现了测量数据从点采集到面采集的转变,极大地提高了被测物体的信息量,是地理信息技术发展的必然需求,是测绘领域续GPS技术之后的又一次技术革命。
三维激光扫描仪的巨大优势就是该技术可以真正做到直接从实物中进行快速的逆向三维数据采集及模型重构,不需要进行任何实物表面处理,其激光点云中的每个三维数据都是直接采集目标的真实数据,使得后期处理的数据完全真实可靠。
因此,其已经成为当前研究的热点之一,并在文物数字保护[2]、变形监测、土木工程、数字城市、地形可视化、城乡规划等领域有广泛的应用。
(2)本文通过与相关研究事例相结合,分别介绍了三维激光扫描仪技术的基本工作原理,并重点介绍了Riegl VZ-400三维数据获取、数据拼接及三维数据进行建模[3];最后,探讨此类三维激光扫描仪的应用前景。
2. 三维激光扫描仪的基本工作原理[4]2.1工作原理概述。
2.1.1根据三维激光扫描仪种类的不同,工作原理也不尽相同,常见的大致有三种:(1)使用脉冲测距技术(Time of Flight)从固定中心沿视线测量距离,测距大于100米,采样速率1000点/秒以上。
(2)相位干涉方法扫描,利用激光连续波发射,根据光学干涉原理确定干涉相位的测量方法,适用于近距离测量。
三维激光扫描仪解决方案一、引言随着科技的不断发展,三维激光扫描仪作为一种高精度、高效率的测量工具,被广泛应用于工业领域、建筑设计、文物保护等各个领域。
本文将介绍三维激光扫描仪的原理、应用场景以及解决方案。
二、原理三维激光扫描仪通过发射激光束并接收反射回来的光来测量物体的形状和位置。
其原理是利用激光的光电效应,将物体表面的光反射回来后,通过对反射光进行测量,便可得到物体的三维坐标信息。
三、应用场景1. 工业领域:三维激光扫描仪可以用于工件的测量和检测,可以快速准确地获取工件的三维形状和尺寸信息,提高生产效率和质量控制能力。
2. 建筑设计:在建筑设计中,三维激光扫描仪可以帮助设计师快速获取建筑物的准确三维模型,减少了传统测量的时间和成本,并提供了更精确的数据支持。
3. 文物保护:文物保护是一个非常重要的领域,三维激光扫描仪可以对文物进行精确的三维扫描,帮助保护者更好地了解和保护文物,同时也为文物的数字化保存提供了有效的手段。
四、解决方案1. 数据采集:使用三维激光扫描仪对目标进行扫描,获取大量点云数据。
通过扫描仪的高速扫描和高分辨率的光电探测器,可以在很短的时间内获得大量的高精度三维数据。
2. 数据处理:对采集到的点云数据进行处理和优化,包括去噪、滤波、配准等步骤。
数据处理的目的是提高数据的质量和准确性,为后续应用提供可靠的数据基础。
3. 数据分析:根据具体需求,对处理后的点云数据进行分析,如提取物体的特征、测量尺寸、进行形状比对等。
通过数据分析,可以深入挖掘数据的内在价值,为决策提供科学依据。
4. 数据可视化:将处理后的数据以三维模型的形式进行可视化展示。
通过可视化,可以直观地观察和分析物体的形状和结构,为用户提供更直观的理解和判断依据。
五、优势和挑战1. 优势:a. 高精度:三维激光扫描仪可以实现亚毫米级的测量精度,远高于传统测量工具的精度。
b. 高效率:激光扫描仪可以在短时间内获取大量数据,大大提高了测量和分析的效率。
基于RIEGL VZ-400三维激光扫描的规划验收测量可行性分析王芬郝旦(广州市城市规划勘测设计研究院广东广州 510060)摘要:依托广东省文艺职业技术学院综合楼验收测量工程案例,选用RIEGL VZ-400三维激光扫描仪进行扫描测量,结合传统方法测量成果,通过将处理结果与传统测量结果的角点坐标、边长数据及分层面积数据的对比分析,探索基于三维激光扫描技术的规划验收测量的可行性,得出三维激光扫描技术应用于规划验收测量成果精度可满足要求。
对于部分圆弧形区域,其精度高于全站仪测量数据精度,三维激光扫描在规划验收测量的应用是完全具备可行性的。
关键词:三维激光扫描规划验收测量精度分析1 引言规划验收测量是针对规划条件核实而进行的,通过对已竣工建筑(道路)进行测绘工作,核查建筑(道路)的施工结果是否与规划许可一致,是否符合许可的各项指标要求;是落实规划,合法利用土地,城市建设管理中必不可少的一个重要环节,规划验收测量成果是建筑(道路)工程规划管理的重要依据;大大提高了规划管理的科学性、准确性和严肃性。
由于规划验收测量相较于一般工程测量的特殊性,其对测量的相对精度和绝对精度都很高。
以广州市为例,边长测量的精度要求较高,建筑物边长小于20 m时,边长限差为2 cm,建筑物边长大于20 m,边长测量的精度要求:Ms≤±0.0005 L (L为建筑物边长),另外,建筑物边长总长与分段长度之和的较差≤±10 cm(参考《广州市城乡规划建设工程测量技术规程》)。
2 RIEGL VZ-400系列激光扫描特色RIEGLVZ-400三维激光仪(如图1所示)拥有RIEGL全波形回波技术(Wave Form Digitization)、实时全波形数字化处理和分析技术(on-line wave formanalysis)和RIGEL独特的多棱镜快速旋转扫描技术,角分辨率高达0.0005°,可同时探测到多目标的细节信息,高密度记录,可去除树木、行人、车辆对扫描过程中的干扰。
RIEGL VZ-400地面三维激光扫描技术应用心得
李培成
【期刊名称】《黑龙江科技信息》
【年(卷),期】2014(000)007
【摘要】结合工程实例论述了目前三维激光扫描技术的流程及作业模式,分析总
结了三维激光扫描仪在大比例尺地形测量工作关键环节中要注意的问题,其方法的应用使的野外测量数据采集作业更加方便、数据处理更加简单,实用范围更加广泛。
【总页数】2页(P85-85,87)
【作者】李培成
【作者单位】新疆维吾尔自治区第一测绘院,新疆昌吉 831100
【正文语种】中文
【相关文献】
1.基于 RIEGL VZ-400及 Ladybug3全景相机的移动激光测量系统的研制及应用[J], 宋杨
2.RIEGL三维激光扫描技术应用于卡拉水电站坝址区的三维纹理模型制作 [J], 龚
卫光;龚建江
3.Riegl VZ-1000地面三维激光扫描仪在铁路快速地形测绘中的应用 [J], 周文明
4.Riegl VZ-400三维激光扫描仪数据的建模的研究 [J], 王旭;王昶
5.基于RIEGL VZ-400三维激光扫描的规划验收测量可行性分析 [J], 王芬;郝旦
因版权原因,仅展示原文概要,查看原文内容请购买。