中国人民解放军第一〇〇一工厂
陀螺仪定向报告
XXX矿业1# 与3# 斜坡道实测
2015年10月26日
潼金矿业1#、3#斜坡道陀螺定向测量成果报告
1 定向设备
本次陀螺定向采用中国人民解放军第一〇〇一工厂自主研发、生产的HGG05型陀螺全站仪(1σ≤5″),编号15001,上置中翰测绘公司生产的TS-802N型全站仪。
2 数据来源
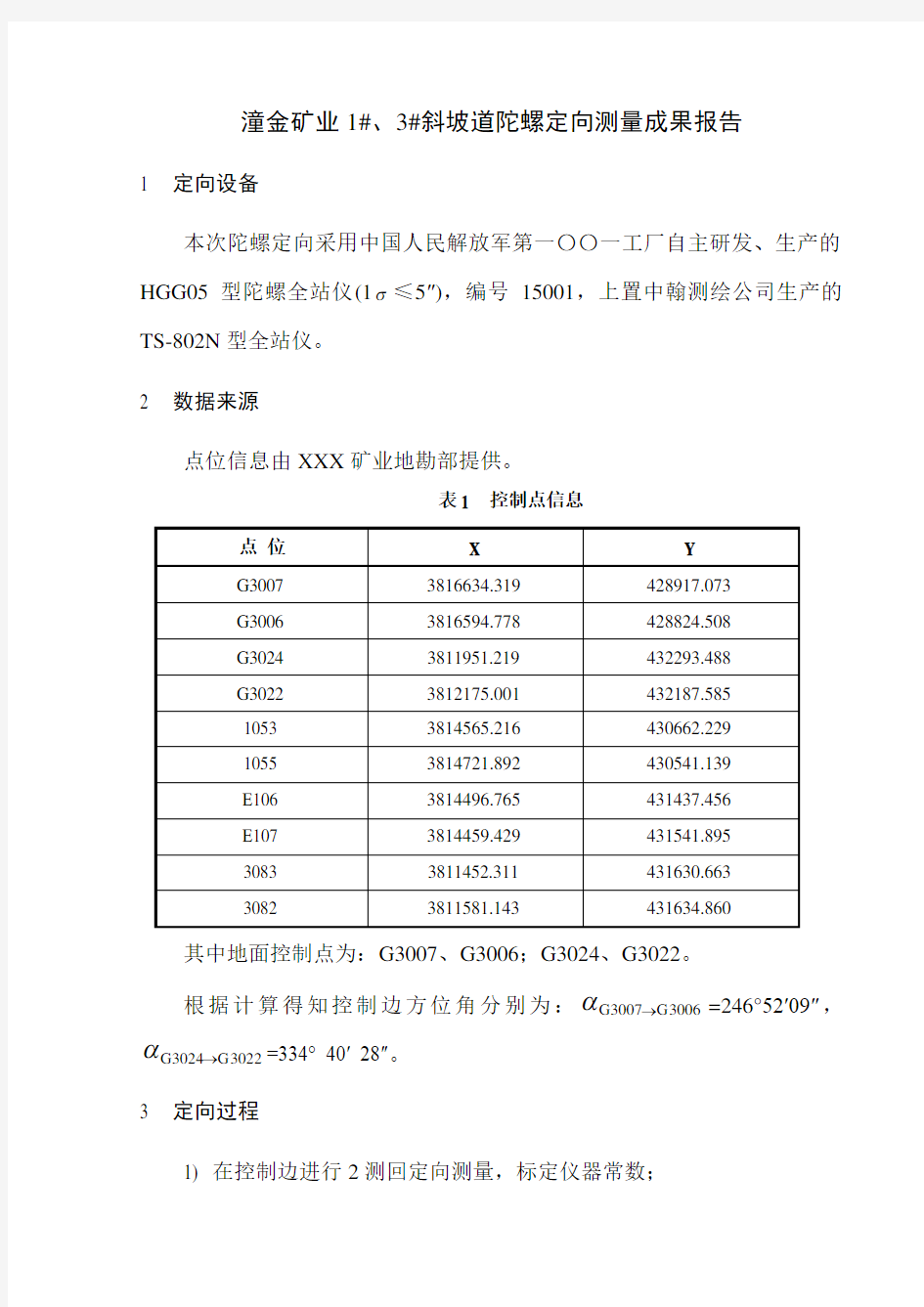
点位信息由XXX矿业地勘部提供。
表1 控制点信息
其中地面控制点为:G3007、G3006;G3024、G3022。
α=246°52′09″,根据计算得知控制边方位角分别为:3006
G3007→
G
α=334° 40′ 28″。
G3024→
3022
G
3 定向过程
1) 在控制边进行2测回定向测量,标定仪器常数;
2) 在待定边进行3测回定向测量;
3) 在原控制边进行2测回定向测量, 以两次控制边测量结果检验仪器的稳定性和精度,确保陀螺定向成果准确可靠。 4 陀螺定向的限差要求
1) 同一条边各测回测量结果最大互差不得超过10″; 2) 两次地面控制边测量结果均值之差不得大于15″。 5 数据处理结果
5.1 方法1数据处理方法及结果 5.1.1 仪器常数的计算
1T 1T1--A A A C γα+==控制控制
式中:?-仪器常数;
控制α-控制边坐标方位角,即3006G G3007→α、3022G G3024→α;
1γ-控制边仪器架设点子午线收敛角;
1T A -控制边测得(含复测)的陀螺方位角均值;
子午线收敛角1γ用下式计算。
?λλγsin )-(1中控制=
式中:控制λ-控制边仪器架设点经度,精确到秒;
中λ-仪器架设点所处3°带中央子午线;
?-仪器架设点纬度,精确到分。
标定仪器常数实测陀螺方位角结果见表2。
表2 仪器常数陀螺测定
5.1.2 待测边测量陀螺方位
待测边测定陀螺方位角结果见表3。
表3 待测边陀螺测定
5.1.3 复测仪器常数
仪器常数复测陀螺方位角结果见表4。
表4 复测仪器常数
经复测,两次控制边测量结果均值之差为分别为13″、6.5″,满足陀螺定向限差要求。
5.1.4 仪器常数的确定
仪器常数见表5。
表5 仪器常数
5.1.5 数据处理
1) 待测边坐标方位角计算
2γα-+=C A 待测待测
式中:待测α-待测边坐标方位角;
待测A -待测边实测陀螺方位角;
2γ-待测边仪器架设点子午线收敛角。
子午线收敛角2γ用下式计算。
?λλγsin )-(2中待测=
式中:待测λ-待测边仪器架设点经度,精确到秒;
中λ-仪器架设点所处3°带中央子午线;
?-仪器架设点纬度,精确到分。
2)子午线收敛角计算的说明
利用高斯坐标反算,选取与控制边相同的地球半径与扁率分母及参考椭球,由X ,Y 计算出仪器架设点(控制边、待测边)的经纬度,进而计
算出相应的子午线收敛角。 5.1.5 测量结果
1)待测边(1053→1055)的坐标方位角为322°18′39.95″; 2)待测边(E106→E107)的坐标方位角为109°40′44.96″; 3)待测边(3083→3082)的坐标方位角为001°51′7.66″。 5.2 方法2数据处理方法及结果 5.2.1 仪器常数的确定
1T A -=?控制α
其中:控制α-控制边坐标方位角;
1T A -控制点测得(含复测)陀螺方位角均值。
方法2仪器常数见表6。
表6 方法2仪器常数
5.2.2 数据处理
待测边坐标方位角用下式计算。
γ
α?++?=2T A 待
其中: ?-仪器常数;
2T A -待测边测得陀螺方位角均值;
γ?-控制边仪器架设点与待测边仪器架设点子午线收敛角之差。
子午线收敛角之差的计算公式用下式计算。
?λλγsin )-(待测控制=?
其中:待λ-待测边仪器架设点经度,精确到秒;
控制λ-控制边仪器架设点经度,精确到秒;
?-陀螺仪架设点纬度,精确到分。
5.2.3 测量结果
1)待测边(1053→1055)的坐标方位角为322°18′41.39″; 2)待测边(E106→E107)的坐标方位角为109°40′46.36″; 3)待测边(3083→3082)的坐标方位角为001°51′07.60″。 6 精度分析
1)同一条边各测回测量结果最大互差均未超过10″,详见表2、表3互差,表明仪器内符合精度符合要求;
2) 两次地面控制边测量结果均值之差均未超过15″,详见表4两次标定常数陀螺方位角均值互差,表明仪器外符合精度符合要求;
3)方法1仪器常数C 互差14.55″,表明仪器在经过运输和纬度发生变化时仪器常数稳定性符合要求。
附件测量原始数据
陀螺力矩测定实验 一、实验目的 1、通过实验了解陀螺力矩产生的原因,以及在工程中的应用; 2、理解陀螺力矩产生的规律。 二、实验内容 在以旋转的平台上(非惯性参考系)装置一高速转子作匀速转动,其转速为?,给旋转平台一个转动的角速度ω,由于陀螺力矩的作用,转子的轴承上产生衣附加的动压力,用传感器测量该动压力的大小。 1、高速转子恒速?转动,实验平台在恒速ω旋转下,测量此时的陀螺力矩; 2、高速转子恒速?转动,实验平台在摆动ω旋转下,测量此时的陀螺力矩。 三、实验仪器设备 1、单轴气浮动力学仿真平台 2、陀螺力矩实验装置 3、动态应变仪 4、应变传感器 四、实验原理 任何绕对称轴高速旋转的转动物体,当对称轴被迫使在空间改变方向,必然产生陀螺力矩作用在迫使转轴改变方向的物体上,这种效应成为陀螺效应。实验装置如图1所示。简化模型如图2所示。
图1 图2 由于高速转子高速自转,转子对于对称轴OZ 的动量矩近似为?=Z J L 0r 。如果转子轴绕OX 轴转动的角速度为ω,且ω的陀螺力矩ω×?=Z J M 0,0M 的方向垂直于纸面指向外,轴承上所受压力l M N = ,如果转子转动角速度过大,则轴承会受到很大压力,甚至会破坏。通过实验可以加深对工程问题的理解。 五、实验步骤 1、 使转子匀速转动,用转速表测出其转速?; 2、 使轴承两边力调零; 3、 使实验平台转动到恒速,测出转速ω; 4、 测出轴承的支座反力; 5、 使实验平台摆动,测出其实验曲线。 六、实验结果 利用数学工具,根据记录下的实验数据,求出计算结果。 L= J= ?= 平台转速ω 测出转速后计算的N 直接测出的N 误差分析 七、实验报告 基座 x
陀螺逆转点法定向及精度评定 摘要 隧道或井巷工程测量导线布设的形式因受巷道形状的制约,若单纯采用改变导线布设形式或提高测角次数与精度等方法,往往难以满足工程施工对于测量的精度要求。陀螺经纬仪是测量井下导线边方位角、提高测量精度的重要仪器。尤其是在贯通测量中陀螺经纬仪的应用非常广泛。贯通测量是一项十分重要的测量工作,必须严格按照设计要求进行。巷道贯通后,其接合处的偏差不能超过一定限度,否则就会给采矿工程带来不利影响,甚至造成很大的损失。本文对陀螺经纬仪工作原理介绍,以及陀螺经纬仪在贯通测量中的精度评定。陀螺经纬仪在不同领域的贯通测量工作中运用实例的分析,总结出在贯通测量导线加测陀螺定向边的最佳位置。 关键词:陀螺定向,贯通测量,陀螺经纬仪,精度评定 ABSTRACT Tunnel or shaft engineering measurement wires for the form of roadway, if simple shape by changing arrangement forms or improve wires and precision Angle measurement methods, and often difficult to satisfy the measurement accuracy for engineering construction. Gyro theodolite is measured in wire edge Angle, improve the measuring precision instruments. Especially in the measurement of the photoelectric theodolite gyro breakthrough is used extensively. Through measurement is a very important measurement work, must strictly according to the design requirements. The roadway expedite, its joint deviation cannot exceed a certain limit, otherwise they will be detrimental to the mining project, and even cause great losses. This paper introduces working principle of gyro theodolite, as well as the breakthrough in the measurement of the gyro theodolite accuracy assess. Gyro theodolite in different fields
陀螺定向测量 陀螺定向测量(gyrostatic orientation survey)是用陀螺经纬仪测定某控制网边的陀螺方位角,并经换算获得此边真方位角的测量工作。常用于定向连接测量。陀螺方位角,是从陀螺仪子午线(测站上通过假想的陀螺轴稳定位置的子午面,即陀螺仪子午面与地平面的交线)北方向顺时针量至某定向边的水平角。 常用方法 确定测站真子午线北方向的常用方向有:中天法,是通过对陀螺仪轴运转的观测,先确定近似北方向,在连续读记摆动的指标线(陀螺轴)反复经过分划线板零线时的时间,和到达东、西逆转点时的水平度盘读数,经计算获得近似北方向的改正数,进而确定测站真北方向;逆转点法,是用陀螺经纬仪跟踪观测摆动的指标线(陀螺轴)反复到达东、西逆转点时的水平度盘读数,经计算确定测站真北方向。 矿井应用 服了几何定向占用井筒而造成停产、耗费大量人力、物力和时间等缺点,同时也克服了随井筒深度增加而降低定向精度的缺点。由于矿井生产中对陀螺定向测量技术的应用还很少,陀螺定向技术在矿井生产中还缺乏系统性的操作要求及数据处理模式。2011年4月,麦格集团天渱公司螺仪部带领天津707所厂家技术人员到煤矿进行陀螺仪的测量演示,通过TJ9000陀螺全站仪与日本品牌陀螺全站仪比较,获取了实证分析数据。从技术及经济角度考虑,对陀螺定向测量技术的研究,在矿井生产中具有非常重要的意义。 1、陀螺定向作业依据 本次陀螺定向作业依据为1989年1月能源部制定的《煤矿测量规程》并参照1990年原中国统配煤矿总公司组织修订、煤炭工业出版社出版的《煤矿测量手册》。 2、陀螺定向作业仪器 陀螺定向采用中船重工TJ9000陀螺全站仪为例,该仪器是下架式的陀螺仪器,有陀螺仪、全站仪、控制器和三脚架等组成。陀螺仪方位角测定标准偏差为±20",全站仪测角精度为2"。 3、陀螺定向方法 陀螺定向采用当今先进的积分法进行观测,定向程序为:
中国人民解放军第一〇〇一工厂 陀螺仪定向报告 XXX矿业1# 与3# 斜坡道实测 2015年10月26日
潼金矿业1#、3#斜坡道陀螺定向测量成果报告 1 定向设备 本次陀螺定向采用中国人民解放军第一〇〇一工厂自主研发、生产的HGG05型陀螺全站仪(1σ≤5″),编号15001,上置中翰测绘公司生产的TS-802N型全站仪。 2 数据来源 点位信息由XXX矿业地勘部提供。 表1 控制点信息 其中地面控制点为:G3007、G3006;G3024、G3022。 α=246°52′09″,根据计算得知控制边方位角分别为:3006 G3007→ G α=334° 40′ 28″。 G3024→ 3022 G 3 定向过程
1) 在控制边进行2测回定向测量,标定仪器常数; 2) 在待定边进行3测回定向测量; 3) 在原控制边进行2测回定向测量, 以两次控制边测量结果检验仪器的稳定性和精度,确保陀螺定向成果准确可靠。 4 陀螺定向的限差要求 1) 同一条边各测回测量结果最大互差不得超过10″; 2) 两次地面控制边测量结果均值之差不得大于15″。 5 数据处理结果 5.1 方法1数据处理方法及结果 5.1.1 仪器常数的计算 1T 1T1--A A A C γα+==控制控制 式中:?-仪器常数; 控制α-控制边坐标方位角,即3006G G3007→α、3022G G3024→α; 1γ-控制边仪器架设点子午线收敛角; 1T A -控制边测得(含复测)的陀螺方位角均值; 子午线收敛角1γ用下式计算。 ?λλγsin )-(1中控制= 式中:控制λ-控制边仪器架设点经度,精确到秒; 中λ-仪器架设点所处3° 带中央子午线; ?-仪器架设点纬度,精确到分。 标定仪器常数实测陀螺方位角结果见表2。
第二章陀螺全站仪 §2.1 陀螺仪及其基本特性(龚建) 一、陀螺仪及其分类 陀螺仪 凡是绕定点高速旋转的物体,或绕自身轴高速旋转的任意刚体,都称为陀螺。如图2-1所示,设刚体上有一等效的方向支点O。以O为原点,作固定在刚体上的动坐标系O-XYZ。刚体绕此支点转动的角速度在动坐标轴上的分量分别为ωx、ωy、ωz,若能满足以下条件: ωz>>ωx ωz>>ωy ωz≈Const (2-1) OZ 为进动运动。 转的地球,而近代物理中广义的定义是:凡是能测量物体相对惯性空间作旋转的装置都叫陀
螺仪,如激光陀螺仪。 陀螺仪的自由度 陀螺仪基本上是一个匀质的转子,其质量大部分集中在轮缘,它能围绕其质量对称轴高速旋转。将转子安置在特殊的悬挂装置上,没有外力作用,使其具有两个或三个回转轴的整个装置,称为具有两个或三个自由度的陀螺仪。 自由陀螺仪的结构如图2-2所示。转子1支撑在内平衡环2上可绕其对称轴作高速度转动,这个轴称为陀螺仪的自转轴,即陀螺主轴,或称X轴。由于转子只能围绕本身轴旋转,因此它具有一个自由度。 转子支撑在内平衡环上,内平衡环又支撑在外平衡环3上,转子和内平衡环一起可绕陀螺仪的内环轴转动,这个轴一般称为Y轴。由于转子既绕本身轴旋转,又可绕内环轴旋转,因此他具有两个自由度。 转子支撑在内平衡环上,内平衡环又支撑在外平衡环上,外平衡环又支撑在底座上,转子和内平衡环、外平衡环一起绕陀螺仪的外环轴转动,这个轴一般称为Z轴。此时由于转子既可绕本身轴旋转,又可绕内、外环轴旋转,因此它具有三个自由度。一般把由内环和外环构成的支架称为万向支架。 如果把陀螺仪的重心与陀螺仪的中心相重合,这种陀螺仪称为三自由度平衡陀螺仪。如果把三自由度陀螺仪限制Y轴或Z轴其中一个自由度,这种陀螺仪称为二自由度陀螺仪。如果把陀螺仪的外环轴下移,偏离陀螺仪的中心,这种陀螺仪称为下悬式陀螺仪或摆式陀螺仪。 摆式陀螺仪如图2-3所示,即在陀螺仪轴上加上悬重G,则重心由陀螺仪中心O下移到
最全的陀螺仪基础知识详解 陀螺仪,又叫角速度传感器,是用高速回转体的动量矩敏感壳体相对惯性空间绕正交于自转轴的一个或二个轴的角运动检测装置,同时,利用其他原理制成的角运动检测装置起同样功能的装置也称陀螺仪。 一、陀螺仪的名字由来 陀螺仪名字的来源具有悠久的历史。据考证,1850年法国的物理学家莱昂·傅科(J.Foucault)为了研究地球自转,首先发现高速转动中地的转子(rotor),由于它具有惯性,它的旋转轴永远指向一固定方向,因此傅科用希腊字gyro(旋转)和skopein(看)两字合为“gyroscopei”一字来命名该仪器仪表。 最早的陀螺仪的简易制作方式如下:即将一个高速旋转的陀螺放到一个万向支架上,靠陀螺的方向来计算角速度。 其中,中间金色的转子即为陀螺,它因为惯性作用是不会受到影响的,周边的三个“钢圈”则会因为设备的改变姿态而跟着改变,通过这样来检测设备当前的状态,而这三个“钢圈”所在的轴,也就是三轴陀螺仪里面的“三轴”,即X轴、y轴、Z轴,三个轴围成的立体空间联合检测各种动作,然后用多种方法读取轴所指示的方向,并自动将数据信号传给控制系统。因此一开始,陀螺仪的最主要的作用在于可以测量角速度。 二、陀螺仪的基本组成 当前,从力学的观点近似的分析陀螺的运动时,可以把它看成是一个刚体,刚体上有一个万向支点,而陀螺可以绕着这个支点作三个自由度的转动,所以陀螺的运动是属于刚体绕一个定点的转动运动,更确切地说,一个绕对称轴高速旋转的飞轮转子叫陀螺。将陀螺安装在框架装置上,使陀螺的自转轴有角转动的自由度,这种装置的总体叫做陀螺仪。 陀螺仪的基本部件有:陀螺转子(常采用同步电机、磁滞电机、三相交流电机等拖动方法来使陀螺转子绕自转轴高速旋转,并见其转速近似为常值);内、外框架(或称内、外环,它是使陀螺自转轴获得所需角转动自由度的结构);附件(是指力矩马达、信号传感器等)。 三、陀螺仪的工作原理 陀螺仪侦测的是角速度。其工作原理基于科里奥利力的原理:当一个物体在坐标系中直线移动时,假设坐标系做一个旋转,那么在旋转的过程中,物体会感受到一个垂直的力和垂直方向的加速度。 台风的形成就是基于这个原理,地球转动带动大气转动,如果大气转动时受到一个切向力,便容易形成台风,而北半球和南半球台风转动的方向是不一样的。用一个形象的比喻解释了科里奥利力的原理。
陀螺定向测量报告记录
————————————————————————————————作者:————————————————————————————————日期:
中国人民解放军第一〇〇一工厂 陀螺仪定向报告 XXX矿业1# 与3# 斜坡道实测 2015年10月26日
潼金矿业1#、3#斜坡道陀螺定向测量成果报告 1 定向设备 本次陀螺定向采用中国人民解放军第一〇〇一工厂自主研发、生产的HGG05型陀螺全站仪(1σ≤5″),编号15001,上置中翰测绘公司生产的TS-802N型全站仪。 2 数据来源 点位信息由XXX矿业地勘部提供。 表1 控制点信息 点位X Y G3007 3816634.319 428917.073 G3006 3816594.778 428824.508 G3024 3811951.219 432293.488 G3022 3812175.001 432187.585 1053 3814565.216 430662.229 1055 3814721.892 430541.139 E106 3814496.765 431437.456 E107 3814459.429 431541.895 3083 3811452.311 431630.663 3082 3811581.143 431634.860 其中地面控制点为:G3007、G3006;G3024、G3022。 α=246°52′09″,根据计算得知控制边方位角分别为:3006 G G3007→ α=334° 40′ 28″。 G3024→ G 3022 3 定向过程
陀螺运动受力分析 Fig.1 简化成四个等质量块的陀螺模型,Ω是进动角速度,ω是转动角速度 将陀螺工作简化如下模型:用绕中心转动的均匀分布的四个质点D,E,G,H来近似质量圆盘(Fig.1),这种简化有助于从受力的角度理解陀螺运动。从线性动量和线性力的角度理解陀螺运动。考虑一个简化的陀螺Fig.1。沿轴A到质心c.m.转动,且质心围绕底座有进动,角动量沿Z轴正向。此外,质心的进动简化在水平面内,没有章动。初始情况下,GH是水平方向,EF是垂直方向。质点动力学分析分别从转动和进动两方面着手分析: 1.自转质量块由于进动产生的力 (先进动,再自转,自转速度v方向变化引起动量变化) 首先,考虑在一个进动微元内的质量块自转速度矢量变化。从Z轴向下看(Fig.2),v 代表D点的初始速度,v’代表经历进动微元后的速度。V代表质心进动的线速度。用dv表示由v到v’的变化(Fig.3)。由于刚性结构施加在质点D上的力使得单位时间内在dv方向动量发生变化,这里的刚性结构是由Fig.1中绿色和红色杆件构成。因此,质点D的对结构的反作用力与dv方向相反。在Fig.1中,这个反作用力施加在结构的D点上,方向沿-Y 轴方向。在进动微元变化的时间里,质点D的自转速率不变,只是方向发生变化,产生的合力记为F1(Fig.1),在D点作用在结构上产生一个径向向内的推力。F1对结构产生了一个力矩以抵消重力矩的作用。用类似方法(Fig.4-5),可以做出质点E的受力分析,
但作用力F 2的方向与质点D 的方向相反。从数学上,F 1和F 2可由Fig.2-4中的相似三角形计算得出: Fig.2俯瞰质点D ,由于进动造成质点D 自转速度矢量方向变化 Fig.3 由于质点D 的进动,线速度随自转的变化 Fig.4 俯瞰质点E ,由于进动造成质点E 自转速度矢量方向变化 Fig.5 由于质点E 的进动,线速度随自转的变化 Fig.6 从侧面观察质点G ,由于进动方向与G 点自转方向垂直,G 点速度不变。 Vdt dv R v = (1) 整理后得, 1dv Vv a dt R == (2) 乘上质点D 的质量有 11D D Vv F m a m R == (3) 类似的有 22E E Vv F m a m R == (4)
结合角速度传感器与加速度计测量车辆运动 当测试车辆时,人们常常需要测量车辆的动态运动以及车辆相对于道路的倾角。我们可以通过加速度计来获得车辆转弯、加速或者制动时产生的冲击力,但是,除非车辆在进行上述运动时保持水平,否侧测试结果是不准确的。比如,你想用加速度计测量车辆的制动力,但车辆是向前倾斜的,测量结果中就会有重力分量。 大多数倾斜传感器把重力方向当作参考方向。重力是一种加速度,并且不断变化(应该是随高度变化吧)。制动、加速和转弯时,车辆会产生加速度。然而当进行倾斜测量时,我们只需要得到重力加速度;当进行车辆动力测量时,却又只想得到运动加速度。 有运动加速度时,倾斜传感器将得到一个不准确的倾角。也就是说,在车辆倾斜时只通过加速度计将无法得到准确的倾角。 通过测量绕车辆重心的旋转,角速度传感器有助于纠正车俩向前倾斜带来的不利影响。不幸的是,角速度传感器有其自身的缺陷。它测量旋转速度,不是旋转角度,通过不断积分得到角度。当旋转速度的测量出现偏差,积分后所得的角度将会有很大的偏差。但是,你可以结合角速度值和加速度值,计算出车辆动态运动时的精确数据。角速度和加速度的缺点可以相互弥补。当拥有足够强的计算能力,我们就可以得到实时的加速度和角度的精确值。 要实现这一点,你需要测量沿三个轴的加速度和角速度。于是我们沿着车身安装了三轴加速度计,和与值对应的三轴角速度计。见图1。如果可能,传感器最好安装在车辆重心,尽量减少旋转加速度对测量带来的不利影响。 (原文件名:page 1.jpg) 引用图片 图1。车辆各轴上的传感器 我们可以用角速度传感器测量车辆绕给定轴的旋转。如果一直对角速度积分,将会得到角度关于时间的函数。例如,您可以使用角速度传感器来跟踪车辆沿着X和Y轴的旋转,然后对传感器信号积分,计算出车辆俯仰角和翻滚角。这是一个关于时间的函数。根据这个计算得到的俯仰角和翻滚角,从加速度传感器信号中减去由于倾斜带来的重力分量,最终得到运动加速度。 要得到可靠的俯仰角和翻滚角,你必须对角速度信号积分。结果是,角速度信号的偏差,会造成角度的偏差,并且随时间线性增加。此外,角速度传感器的随机噪声会导致计算角度的随机波动,这种波动使得角度以与时间的平方根成正比的速度漂移,even in the absence of rate bias error.这些影响将限制昂贵的角速度传感器在超过几分钟测量时的应用。 幸运的是,我们可以利用角速度传感器短时测量准确的优势和加速度计长时稳定的特点,两者结合,得到即能短时稳定又能长时稳定的倾角。用角速度传感器测量短时内角度变化,把加速度传感器当做倾角传感器测量倾角,并在一个长时间范围内,迫使角速度传感器得到的倾角慢慢匹配加速度传感器得到的倾角。 要执行这些操作,需要有传感器,以及数据采集和处理设备。我们使用一个三轴加速度计和(三个)3轴角速度计。不管沿哪个方向,你都需要以能测量车辆完整运动的目的来安装这些传感器。还可以添加一个温度传感器,用其采集的数据补偿温度对加速度计和角速度计输出的影响。然后将传感器信号数字化,并输入计算机或存储器。 可以使用电脑对得到的数据进行计算。但是,如果想看到实时的计算结果,那得需要一台数字信号处理器(DSP),作为信号采集设备之一。然后,将计算得到的角度数据、已修正的加速度和角速度信息用数据线传送到电脑。如果发送的是二进制数据包,工作在38.4K波特率的串行RS-232数据线应该满足超过200Hz的传输速率。这大大快于角速度传感器的带宽。 尽量把传感器安装在靠近车辆运动中心的地方。否侧旋转产生的离心力将会被加速度计测量。请注意,我们使用加速度计只是测量车辆重心的线性加速度,所以要尽量减少旋转运动对加速度测量的耦合。
陀螺全站仪定向精度评定和在工程中应用 摘要:目前陀螺全站仪标称精度大多在8到20秒之间,而常用全站仪标称精度 1秒或2秒,很多测量人员困惑于如何能用这么“低精度”陀螺全站仪来复测检核 的“高精度”全站仪测量的精密导线呢?查看了很多陀螺经纬仪(全站仪)精度相 关文献,一般只提到某款陀螺经纬仪(全站仪)精度指标达到多少,或者某工程 应用中实测精度达到多少,缺乏对精度指标的说明,造成了现在大量精度要求较 高项目(如:地铁导线复测)测量技术人员对陀螺精度困惑。本文从标称精度评 定及工程实际应用方法来说明这个问题。 关键词:陀螺全站仪精度、陀螺定向、导线方位校核 Abstract:At present,the gyro total station nominal accuracy mostly between 8 to 20 seconds,and commonly used total station instrument nominal accuracy of 1 or 2 seconds,many Surveyor confused on how to with such low accuracy gyro total station reflex test check the high precision of total station instrument measurement precision wire? To view the lot of gyro theodolite(total station)relative to the precision of the literature,generally only mentioned a gyro theodolite(total station)precision index reach the number,or a project application measurement accuracy reach,lack of precision description index,caused by now a large number of high precision project(such as:subway traverse azimuth verification)measurement of technical personnel on the precision of gyro is confused.In this paper,the nominal accuracy assessment and engineering application methods to description the problem. Keywords:gyro total station,gyro direction,traverse azimuth verification 1、引言 目前各地大量建设地铁轨道交通工程,地下定向测量十分重要,隧道《城市轨道交通工 程测量规范》中联系测量可采用陀螺经纬仪、铅垂仪(钢丝)组合定向测量;地下控制测量 部分要求贯通面一侧隧道长度大于1500米时,适当位置加测陀螺边提高控制导线精度。目 前陀螺全站仪标称精度大多在8到20秒之间,而常用全站仪标称精度1秒或2秒,地铁控 制测量导线采用2.5秒精密导线,以往陀螺定向测量应用较多的矿山测量中一般采用7秒导线,很多测量人员困惑于如何能用这么“低精度”陀螺全站仪来复测检核地铁施工中采用的“高 精度”全站仪测量的精密导线呢?对陀螺全站仪标称精度理解,测量方法和精度评定掌握,解 决这个问题对正确使用陀螺定向保证导线复测有重要的实践意义。 2、陀螺全站仪精度指标 查看了很多陀螺经纬仪(全站仪)精度相关文献,一般只提到某款陀螺经纬仪(全站仪)精度指标达到多少,或者某工程应用中实测精度达到多少,缺乏对精度指标的说明,造成了 现在大量精度要求较高项目(如:地铁导线复测)测量技术人员对陀螺精度困惑。这里先提 两个概念:精确度和精密度。准确度(Accuracy):被测量所得值与真值间的一致程度。精 密度(precision),被测对象重复测量所得示值。(JJF1001-2011通用计量术语及定义)。陀 螺全站仪的精度指标采用的是准确度(Accuracy)。下面通过NTS-342T(54783)陀螺全站仪 标称精度:一次定向中误差m=±10″,在广州市计量检测技术研究院校准过程来说明这两个概念。 2015年1月28日,在广州市计量检测技术研究院陀螺仪校准装置上校准南方NTS-342T (54783)陀螺全站仪,校准装置天文基准方位角为=161°35′27.9″±0.5″。 陀螺全站仪实测数据如下: 序号测量参数值陀螺方位角(° ′ ″)与天文基准方位角差值(″)
陀螺转子偏转角的测量模型 针对陀螺转子偏转角的测量,采用降维分析的方法,建立了静态模型与动态模型。首先根据空间几何关系和坐标变换原理得出陀螺转子相关参数间的关系式,基于此推导出具有垂直关系的两个低维度偏转角测量公式,合成偏转角在三维空间中关于占空比的二元关系式;并对线性关系的条件进行了仿真分析,发现方位角在±30°内一元线性关系良好。此种测量方法便捷、精确度较高,具有一定的应用价值。 标签:降维分析;静(动)态模型;线性度;MATLAB仿真;占空比 1 概述 从力学角度分析,陀螺转子可近似为绕一定支点的做三自由度运动的刚体,即绕其对称轴高速旋转的飞轮转子。陀螺转子通常采用同步电机、磁滞电机等拖动方法来使其绕自转轴高速旋转,且转速近似为常值。 当陀螺转子以一定的角速度绕其自转轴旋转时,其自转轴在三维空间内相对于原自转轴位置所偏转的角度为偏转角(工程上称为方位角),广泛应用于导弹的离轴发射和制导、雷达搜索及随动、飞机船舶的航向陀螺仪等。因此其测量精度具有至关重要的意义。 典型的陀螺转子成球台结构,在其表面涂覆有黑、白相间的条纹图案,一个黑色条纹和与其相邻的白色条纹为一组条纹,如图1所示。工程上常采用光电传感器测量陀螺转子的方位角,光电传感器可以接收到黑、白条纹所反射的光,由于黑白条纹对信号光的反射率差异,可以定义光电传感器接收到白条纹反射光的时间与接收到该组黑白条纹反射光的时间之比为占空比k。若陀螺转子的自转速度恒定,则占空比可以转换为光电传感器所在的平面与陀螺转子表面相交的交线在白条纹部分的弧长与在该组黑白条纹部分的弧长之比。 2 位标器的分布及基本模型的搭建 2.1 位标器分布模型 考虑到陀螺转子做三自由度的运动,其自转轴在三维空间的偏转角Φ可降成两个维度的分量,那么用一个位标器测量的占空比k必然不能反映偏转角Φ真实值作用,因此在每个独立的维度上放置位标器。为了防止位标器分布造成的微小误差,每个维度上两个方向各放置一个位标器,位于与陀螺转子转轴垂直的同心圆上,如图1所示。 2.2 模型准备 以陀螺转子的球心为坐标原点,自转轴为X轴,建立右手坐标系。
SinoGyro陀螺测斜仪定向操作规程 一、检查仪器密封圈是否都已上好并完好无缺,仪器连接丝扣处用丝扣油涂抹,连接好仪器 并打紧。 二、在井上将井下仪放置在井斜20—30度之间。 三、转动井下仪,使定向引鞋的定键槽垂直向上并保持稳定。 四、开机,待仪器运转稳定后开始测量;连续测量三次以上,取最后三次稳定重力高边数值 的平均值(重复性误差≤+10)作为“高边初始角”的值输入计算机。 五、重测,确认此时重力高边实测数值为零(误差≤+10);仪器断电。 六、为了确保仪器井下顺利入键,定向接头下井之前必须与仪器引鞋进行地面入键测试,一 切顺利后,定向接头方可下井。 七、仪器下井时,在定向键槽涂上铅油。下放时下放速度≤2000米/小时;上提时≤1800 米/小时。当井下仪下放距离定向接头50米时,控制下放速度在1200-1500米/小时之间;仪器入键后,待地滑轮落地时,方可停绞车。 八、绞车停稳2分钟后,开机测量,连续测量2次,检查仪器稳定性和重复性并记录测量数 据;一切正常后仪器断电,待陀螺停稳后上提30米以上,开始第二次坐键并测量;连续坐键三次,三次高边测量值误差≤+50时即可确认仪器入键。 九、仪器入键后不动,地面转动钻杆或油管至所需位置,然后上提下放钻杆或油管各三次, 每次活动范围3—5米,待活动完成后开机测量定向键的位置,如果达不到要求,继续转动和活动井下工具,至定向键位置达到工艺要求为止,至此陀螺定向结束。 十、陀螺测斜仪高边转换角默认值为3度,测量过程中如果想同时观察陀螺高边和重力高边 时,可在同一位置改变高边转换角的数值来实现。 十一、定向测量结束后,数据存盘,起出井下仪,进行现场资料交接。
陀螺全站仪在隧道测量中的应用 摘要:本文以某特长盾构法隧道为例,讲述了一种利用高速回转体的内置陀螺进行真北方向的准确定位的高精度全站仪在隧道定向测量中的应用。并讨论了如何利用陀螺全站仪提高超长隧道测量定向精度问题。 关键词:陀螺全站仪定向隧道测量导线精度 隧道内导线由于受条件的限制其图形强度较弱,随着隧道掘进的距离越长,其点位的精度越差,特别是当城市地铁建设中的联系测量受到外界环境的影响越来越大,在洞内引测方位角的条件受到极大限制, 洞内定向的精度很难保证。而将自动陀螺仪系统使用到地铁和隧道工程中, 就极大地提高了地铁隧道联系测量的精度, 确保了本隧道的准确贯通。 特别针对特长隧道的贯通,由于距离长,横向偏差大特点,故在引测地下导线过程中采用高精度陀螺全站仪加测导线边的陀螺方位角来提高隧道内导线的精度,减小贯通误差。观测采用高精度陀螺全站仪,采用跟踪逆转点法连续测量八组逆转点,各组中值限定在±5″内,然后取平均值。平差采用严密平差计算各角的改正数,以提高传递方位角的精度。同时,拟在隧道两侧布置控制点构成闭合导线环,增加多余观测,然后进行平差,以提高观测成果精度和观测成果的可靠性。本文主要研究陀螺仪与常规导线网的关系,陀螺仪的使用对导线精度的影响以及在实际应用中如何根据测量限差来设置陀螺观测。 1 陀螺全站仪方位测定原理与计算 寻北有多种方法,目前主要有四种:磁北法、天文观测法、陀螺仪和加速度计寻北法。磁北法受地球磁偏角和磁偏角随时间变化的影响以及周围铁磁物质的影响,精度不易提高,只能粗略定向。天文观测法寻北是通过光学仪器观察天体而完成定向的,其定向精度很高,但是通常它需要较长的作业时间,还完全受气候条件的限制,不便于野外机动使用。陀螺和加速度计寻北都是惯性技术的产物,是根据惯性元件敏感地球的自转运动而实现定北的,地球的自转角速度水平分量就是地理正北方向,其主要特点是:定向精度较高,测量时间短,不受气候条件限制(可以全天候工作),在任何时间和地点(高纬度地区除外)都可以自主测量,而且操作简便,易于实现自动定向和机动使用。陀螺寻北是目前使用较为普遍的方法,加速度计寻北目前也取得了一定的进展,但尚未见实际应用。
陀螺进动理论及其局限性 什么是陀螺?广义上说,只要能绕某轴转动,而此轴又可绕另一汇交轴转动的刚体就可叫作陀螺。但工程上常将具有固定点的,高速自转的对称刚体称为陀螺。就像我们平时玩的玩具陀螺,由于高速自转,就有可能对对称刚体的定点运动作近似研究。 设对称刚体在对称轴z (陀螺主轴)上具有固定点O ,刚体有3个自由度;陀螺绕主轴的转动惯量为J 。如果陀螺的自转角度大大的大于主轴在空间的转动角速度,就可用陀螺的自转动量矩 H J k =Ω 近似代替陀螺对点O 的全部动量矩。这里Ω是陀螺的自转角速度,由陀螺马达维持为常量(转速通常为6000rpm 到10000rpm ),因此,陀螺自转动量矩H 的大小为常量,方向与主轴一致 这时对点O 的动量矩可近似写成: 0dH M dt = H 对时间的导数的物理意义是H 端点的速度V H ,因而有V H =0 M 即陀螺自转动量矩H 端点的速度等于陀螺所受的外力矩。由该式可推出陀螺的三个力学特性: 1.定轴性 如果陀螺不受任何外力矩,则其主轴在惯性空间保持方向不变 2.进动性 如果陀螺受到外力矩的作用,则主轴的运动并不是在外力矩的作用平面内发生,而是在垂直于该平面发生。这种特殊运动称为陀螺的进动性,如图1所示,力F 作用于陀螺主轴,对点O 产生力矩为Mo ,H 端点有速度V H =0 M ,于是主轴绕y 轴转动,即垂直于力F 与支点O 形成的铅垂平面运动。进动角速度V M H H H ω== 图1 3.陀螺效应 如果强制陀螺以角速度W 进动,则陀螺必给施力者一个反力
偶,其力矩为Mr , 有: Mr =-Mo Mr =H ×ω 这个力矩与一般刚体的反作用力矩也不相同,称为陀螺力矩;与陀螺力矩有关的现象称为陀螺效应 这些结论统称为陀螺的进动理论,它是高速自转下的近似理论,只适用于三自由度陀螺。 陀螺进动理论是有其局限性的,是近似的,其本质是忽略了陀螺的惯性,一般的静止物体受力时,物体有加速度,但不能立刻获得速度,必须经过一段时间后才能获得速度,这说明物体有惯性。而陀螺进动理论指出,只要有力矩M 作用,陀螺主轴立即以角速度ω进动,这显然忽略了陀螺的惯性。 这就导致了进动理论对某些必须考虑陀螺惯性的问题失效,例如:涉及稳定性的问题。 图2 如图2所示,以直立陀螺为例,其重心位于支点的上方,A 为对n 轴的转动惯量。依照进动理论,在重力矩作用下,H 端点的速度恒垂直于陀螺主轴z 与铅垂轴n 构成的平面,因此,不管自转角速度如何,陀螺主轴均作圆锥运动而不倒,这显然与实际不符。实际上陀螺主轴在作进动的同时还叠加有高频微幅的圆锥状抖动,称为陀螺的章动。如果这个章动是随时间发散的,则陀螺在铅直位置的直立状态就不可能稳定。若要考虑陀螺的章动,就必须考虑其惯性,也就必须转向精确的动力学方程。当直立 陀螺的主轴在铅直线附近作圆锥运动时,有 22sin ()sin cos sin sin [()cos ]0J J A Pa J J A Pa ψ?θψθθθθψ?ψθ+-=-+--= 当0θ≠时,有 2()cos 0J J A Pa ψ? ψθ+--= (1) 引入变量 cos ? ψθΩ=+ 它的意义是陀螺角速度在主轴上的投影,且有L C z =Ω。由于重力矩Mo 恒
常见的陀螺仪性能指标与解释 零偏 零偏,又称为零位漂移或零位偏移或零偏稳定性,也可简称零漂或漂移率,英文中称为drift或bias drift。零偏应理解为陀螺仪的输出信号围绕其均值的起伏或波动,习惯上用标准差(σ)或均方根(RMS)表示,一般折算为等效输入角速率(°/ h)。在角速度输入为零时,陀螺仪的输出是一条复合白噪声信号缓慢变化的曲线,曲线的峰-峰值就是零偏值(drift),如图2-6所示。在整个性能指标集中,零偏是评价陀螺仪性能优劣的最重要指标。 分辨率 陀螺仪中的分辨率是用白噪声定义的,如图2-6 中所示,可以用角随机游走来表示,可以简化为一定带宽下测得的零偏稳定性与监测带宽的平方根之比,其单位为°??1Hz,或简化为°?。角度随机游走表征了长时间累积的角
度误差。角随机游动系数反映了陀螺在此处键入公式。的研制水平,也反映了陀螺可检测的最小角速率能力,并间接反映了与光子、电子的散粒噪声效应所限定的检测极限的距离。据此可推算出采用现有方案和元器件构成的陀螺是否还有提高性能的潜力。 标度因子 标度因子是陀螺仪输出量与输入角速率变化的比值,通常用某一特定的直线斜率表示,该斜率是根据整个正(或负)输入角速率范围内测得的输入/输出数据,通过最小二乘法拟合求出的直线斜率。对应于正输入和负输入有不同的刻度因子称为刻度因子不对称,其表明输入输出之间的斜率关系在零输入点不连续。一般用刻度因子稳定性来衡量刻度因子存在的误差特性,它是指陀螺在不同输入角速率情况下能够通过标称刻度因子获得精确输出的能力。非线性往往与刻度因子相关,是指由实际输入输出关系确定的实际刻度因子与标称刻度因子相比存在的非线性特征,有时还会采用线性度,其指陀螺输入输出曲线与标称直线的偏离程度,通常以满量程输出的百分比表示。 动态范围 陀螺在正、反方向能检测到的输入角速率的最大值表示了陀螺的测量范围。该最大值除以阀值即为陀螺的动态范围,该值越大表示陀螺敏感速率的能力越强。 带宽 带宽是指陀螺能够精确测量输入角速度的频率范围,这个频段范围越大表明
英文名称:gyroscope 定义:利用高速回转体的动量矩敏感壳体相对惯性空间绕正交于自转轴的一个或二个轴的角运动检测装置。利用其他原理制成的角运动检测装置起同样功能的也称陀螺仪。 简介 绕一个支点高速转动的刚体称为陀螺(top)。通常所说的陀螺是特指对称陀螺,它是一个质量均匀分布的、具有轴对称形状的刚体,其几何对称轴就是它的自转轴。由苍蝇后翅(退化为平衡棒)仿生得来。 在一定的初始条件和一定的外在力矩作用下,陀螺会在不停自转的同时,还绕着另一个固定的转轴不停地旋转,这就是陀螺的旋进(precession),又称为回转效应(gyroscopic effect)。陀螺旋进是日常生活中常见的现象,许多人小时候都玩过的陀螺就是一例。 陀螺仪 人们利用陀螺的力学性质所制成的各种功能的陀螺装置称为陀螺仪(gyroscope),它在科学、技术、军事等各个领域有着广泛的应用。比如:回转罗盘、定向指示仪、炮弹的翻转、陀螺的章动、地球在太阳(月球)引力矩作用下的旋进(岁差)等。 陀螺仪的种类很多,按用途来分,它可以分为传感陀螺仪和指示陀螺仪。传感陀螺仪用于飞行体运动的自动控制系统中,作为水平、垂直、俯仰、航向和角速度传感器。指示陀螺仪主要用于飞行状态的指示,作为驾驶和领航仪表使用。 现在的陀螺仪分为,压电陀螺仪,微机械陀螺仪,光纤陀螺仪,激光陀螺仪,都是电子式的,可以和加速度计,磁阻芯片,GPS,做成惯性导航控制系统。 结构 基本上陀螺仪是一种机械装置,其主要部分是一个对旋转轴以极高角速度旋转的转子,转子装在一支架内;在通过转子中心轴XX1上加一内环架,那么陀螺仪就可环绕飞机两轴作自由运动;然后,在内环架外加上一外环架;这个陀螺仪有两个平衡环,可以环绕飞机三轴作自由运动,就是一个完整的太空陀螺仪(space gyro)。 历史 早于874年,中国陕西省法门寺供奉佛指舍利的贡品中,曾出现过用陀螺仪制作的香囊1850年法国的物理学家莱昂·傅科(J.Foucault)为了研究地球自转,首先发现高速转动中的转子(rotor),由于惯性作用它的旋转轴永远指向一固定方向,他用希腊字gyro(旋转)和skopein(看)两字合为gyro scopei 一字来命名这种仪表。 陀螺仪是一种既古老而又很有生命力的仪器,从第一台真正实用的陀螺仪器问世以来已有大半个世纪,但直到现在,陀螺仪仍在吸引着人们对它进行研究,这是由于它本身具有的特性所决定的。陀螺仪最主要的基本特性是它的稳定性和进动性。人们从儿童玩的地陀螺中早就发现高速旋转的陀螺可以竖直不倒而保持与地面垂直,这就反映了陀螺的稳定性。研究陀螺仪运动特性的理论是绕定点运动刚体动力学的一个分支,它以物体的惯性为基础,研究旋转物体的动力学特性。
陀螺转子偏转角的测量 图1给出了测量陀螺转子偏转角的装置结构示意图。陀螺转子是一个球台,在其表面涂覆有黑、白相间的条纹图案,一个黑色条纹和与其相邻的白色条纹为一组条纹;在距转子表面一定距离上固定放置能够接收黑、白条纹反射光的光电传感器,共放置四个,位于与陀螺转子转轴垂直的同心圆上,每隔90°放置一个。 图1. 测量陀螺转子偏转角的装置结构示意图 当陀螺转子以一定的角速度绕其自转轴旋转时,光电传感器可以接收到黑、白条纹所反射的光,由于黑白条纹对信号光的反射率差异,可以定义光电传感器接收到白条纹反射光的时间与接收到该组黑白条纹反射光的时间之比为占空比k。若陀螺转子的自转速度恒定,则占空比可以转换为光电传感器所在的平面与陀螺转子表面相交的交线在白条纹部分的弧长与在该组(图2红浅黑为一组)黑白条纹部分的弧长之比。 以陀螺转子的球心为坐标原点,陀螺转子的自转旋转轴为X轴,建立右手坐标系。旋转方向定义为:右手握住旋转轴,竖起拇指指向旋转轴正方向,正向旋转方向就是其余手指卷曲的方向,即从旋转轴正方向看下去,逆时针方向就是正向旋转方向。 假设在陀螺转子表面涂覆的黑、白条纹的数目均为n,则赤道圆上每个黑条纹或白条纹所对应的角度为α=π/n;陀螺转子上下表面对应的球心角为?m。如图2
所示(为便于表示,以红色标识白条纹)。弧 DBI所在的大圆可以看作是过B点的经线圆(即弧 ABC所在的大圆)以OB为轴(即Y轴)逆时针旋转β角而得到的,弧 DEF所在的大圆可以看作是过B点的经线圆绕X轴顺时针旋转α角而得到的。由几何关系可知,若α和?m均为定值时,β也为一定值。 图2. 陀螺转子表面黑白条纹的定义 在实际过程中,当陀螺转子以一定的角速度绕其自转轴(即X轴)旋转时,自转轴会随着外界的环境以球心为定点发生偏转。若陀螺转子没有发生偏转,四个光电传感器所测得的占空比是相同的;若陀螺转子的自转轴发生偏转,则四个固定不动的光电传感器所测得的占空比也会发生变化,根据光电传感器测得的占空比值即可计算出陀螺转子的偏转角度。 请建立数学模型解决以下问题(问题1必选,问题2~4任选其一): 1.定义陀螺转子的自转轴与原始X轴之间的夹角为Φ,建立Φ与光电传感器测得的占空比之间的关系。如能给出解析关系式,则给出解析关系式;若不能给出解析关系式,则给出关系曲线或曲面均可。 2.建立黑白条纹的参数α、?m和β之间的关系式,并分析是否可以通过改变α、?m使得问题1中建立的关系式或关系曲面变成线性关系(即直线或平面)。 3.估算四个传感器角度分布误差(是否严格按照每隔90°分布)及四个传感
三轴陀螺仪的原理和应用 三轴陀螺仪就是可以在同一时间内测量六个不同方向的加速、移动轨迹以及位置的测量装置。单轴的话,就只可以测定一个方向的量,那么一个三轴陀螺就可以代替三个单轴陀螺。它现在已经成为激光陀螺的发展趋向,具有可靠性很好、结构简单不复杂、重量很轻和体积很小等等特点。 很多加速度传感器和角速传感器只是很纯粹的传感器,不一定都是陀螺仪。导弹、轮船以及飞机里都安装有指示仪,定向指示仪是它们的核心部分。它是被安装在可以自由转动方向的框架比较小的飞轮中的,此装置里,由于轴承的摩擦力矩相对来说比较小,因此可以忽略掉。它的刚体结构是属于高度对称的,因此它的质心主要是在连杆中心的位置。如果飞轮绕着自己的对称轴作高速的转动的时候,框架的方向无论发生什么变化,它的中心轴空间的取向是不会发生任何变化的,这个特点是定向指示仪很重要的特征之一。 当给一架飞机安装三轴陀螺仪,同时让它的三个小飞轮的自转轴互相保持垂直的状态,那么根据飞轮轴相对机身的指定方向,驾驶员就可以确定好海伦的航行方向了。其实火箭以及鱼雷之中也安装了定向指示仪的,它有自动导航的功能。鱼雷前进的时候,定向指示仪轴线所指方向是不会发生变化的,当鱼雷受到风浪影响而导致前进的方向发生变化的时候,定向指示仪和鱼雷的纵轴之间就会出现一些偏差,这个时候可以通过启动有关器械来使舵的角度得到一定的改变,这样就可以让鱼雷保持原来的方向继续前进。而在火箭中,是通过使 喷气的方向得到一定的改变来改变飞行的方向。 陀螺仪可以比较准确地测量出运动物体的位置和方向,作为一种惯性的导航仪器,它广泛应用在国防、航天、航海以及航空领域中。它的发展对现代有很重要的意义,例如:高新科技、国防以及国家的工业等等。机械式的陀螺其实是传统的惯性陀螺,它的结构很复杂,因此它对工艺上的结构要求是非常严格的,很多因素都会影响它的测量精度。现代陀螺仪的发展已经越来越快了,技术也越来越成熟,已经成功进入到全新的阶段中。发展最快的当属光纤陀螺仪,它的工作很可靠、灵敏度很高以