考虑轴向力影响欧拉梁动力反应分析
- 格式:doc
- 大小:244.00 KB
- 文档页数:11
概念题1、ritz法和releiy法是求解振动系统固有频率的两种近似法,简述其基本思路。
瑞兹法:是将连续系统离散为有限个自由度的系统,再根据机械能守恒定律进行计算,并用拉式方程建立微分方程,得到系统的振型函数,由此得到系统的固有频率以及振型。
瑞利法:主要用来估算系统的基频,它的依据的是机械能守恒定律,即T MAX=U MAX,对任一个连续系统,只能近似给出第一阶振型函数,且要求满足系统的端点条件,再计算系统的动能和势能,即估算出系统的基频。
2说明矩阵迭代法求解多自由度系统第一阶固有频率的基本步骤以及思路(P91)。
基本思路:KA-w2MA=0 也可以写成:1/w2A=ɸMA令D=ɸM, λ=1/w2 则:DA=λA基本步骤:1)求第一阶固有频率以及振型(1)任意假设一个初始振型A(2)按下列格式计算位形列降序列A mA1=DA0 A2=DA1 。
`A n=DA n-1当n足够大的时候,A n趋近于A1,1/λ1=ω123轴向力对梁横向振动有何影响?(拉压)振动方程为:(P122)轴向拉力可以提高梁横向振动的固有频率;轴向压力可以降低梁横向振动的固有频率;4造成非线性恢复力的原因有?1)几何非线性,即大位移,超出了小变形范围;2)物理非线性,即结构材料的性质和及结构强度性能超出弹性范围;5简述求解无阻尼多自由度系统对初始激励响应的基本步骤1)建立振动微分方程,确定系统的质量矩阵以及刚度矩阵;2) 求固有频率以及振型3)求主振型矩阵和正则振型矩阵4)将外激励再转化为正则坐标下的激励(初始条件)5)求正则坐标下的系统响应6)求广义坐标下的系统响应6在建立梁的横向振动力学模型时,梁的力学模型分为哪三种?1) 欧拉-伯努利梁:只考虑弯曲变形,不计剪切变形及转动惯量的影响。
2)瑞利梁:考虑弯曲和转动惯量,不计剪切变形的影响。
3)铁木辛柯梁:弯曲变形,转动惯量,剪切变形都考虑。
7隔震分哪几种?机理是什么?举例说明1)隔震分为主动隔振和被动隔振两种。
梁的应力和强度计算1.梁的基本假设梁的基本假设包括:梁材料是均匀各向同性的,梁截面是平面截面,梁的纵向伸缩变形可以忽略,梁的横向收缩变形可以忽略,梁截面平面保持平直。
2.梁的受力分析在进行梁的应力和强度计算之前,需要对梁的受力进行分析。
常见的梁的受力包括弯曲、剪切和轴向拉压等。
2.1弯曲弯曲是梁的一种主要受力状态,发生在梁受到弯矩作用时。
对于弯曲受力的梁,可以运用梁弯曲理论进行应力和强度计算。
常见的梁弯曲理论包括欧拉-伯努利梁理论和延性梁理论。
2.2剪切剪切是梁的另一种重要受力状态,发生在梁上部分截面受到剪力作用时。
剪切力引起梁截面上的剪应力,可以通过剪切变形理论进行计算。
2.3轴向拉压轴向拉压发生在梁上部分截面受到轴向拉力或压力作用时。
轴向拉力或压力引起梁截面上的轴向应力,可以通过轴向变形理论进行计算。
3.梁的应力分析根据梁的基本假设和受力分析,可以进行梁的应力分析。
梁的应力分析包括黄金区和非黄金区的判断、应力分布的计算和强度设计的确定。
3.1黄金区和非黄金区判断黄金区是指梁截面上应力最大的区域,通常位于材料的纤维处。
在黄金区内,应力达到梁材料的屈服强度。
非黄金区则是指其他区域,应力小于屈服强度。
3.2应力分布计算根据梁的受力和应力分析,可以计算出梁截面上的应力分布。
应力分布的计算可以通过梁的几何形状、外力和边界条件以及材料的性质来确定。
常见的应力分布包括弯曲应力、剪切应力和轴向应力等。
4.梁的强度设计梁的强度设计是根据计算得到的应力分布进行的。
根据材料的强度,可以确定梁的尺寸和形状,以满足梁的极限状态和使用状态的要求。
总结起来,梁的应力和强度计算是梁力学中的基本问题,包括梁的受力分析、应力分布计算和强度设计等内容。
通过合理的计算和设计,可以确保梁的安全和可靠性,提高结构的性能。
哈密尔顿原理求欧拉伯努利悬臂梁欧拉伯努利悬臂梁是一种常见的结构,它由一根悬臂梁和一根支撑梁组成。
在工程实践中,我们需要对这种结构进行分析和设计,以确保其安全可靠。
在这篇文章中,我们将介绍如何使用哈密尔顿原理来求解欧拉伯努利悬臂梁的运动方程。
让我们来了解一下哈密尔顿原理。
哈密尔顿原理是一种基于能量守恒原理的物理学原理,它可以用来描述物体在运动过程中的动力学行为。
在哈密尔顿原理中,我们将系统的动能和势能表示为一个函数,称为拉格朗日量。
然后,我们使用拉格朗日量来构建一个作用量函数,该函数描述了系统在不同时间下的状态。
最后,我们使用变分法来求解作用量函数的极值,从而得到系统的运动方程。
对于欧拉伯努利悬臂梁,我们可以将其看作一个弹性体系,其动能和势能可以表示为:动能:T = 1/2 * m * v^2势能:V = 1/2 * k * y^2其中,m是悬臂梁的质量,v是悬臂梁的速度,k是弹性系数,y 是悬臂梁的位移。
将动能和势能代入拉格朗日量中,我们可以得到:L = T - V = 1/2 * m * v^2 - 1/2 * k * y^2接下来,我们需要构建作用量函数。
作用量函数可以表示为:S = ∫Ldt其中,t是时间,∫表示对时间的积分。
使用变分法求解作用量函数的极值,我们可以得到欧拉伯努利悬臂梁的运动方程:m * d^2y/dt^2 + k * y = 0这是一个二阶常微分方程,可以使用常规的数学方法求解。
通过求解这个方程,我们可以得到悬臂梁在不同时间下的位移和速度,从而了解其动力学行为。
哈密尔顿原理是一种非常有用的物理学原理,可以用来求解各种结构的运动方程。
对于欧拉伯努利悬臂梁这样的结构,使用哈密尔顿原理可以得到简洁而准确的运动方程,为工程实践提供了重要的理论支持。
轴向载荷 、转动惯量和剪切变形对简支梁固有频率的影响龚善初摘 要 : 利用能量法研究了简支梁在轴向载荷作用下固有频率与轴向载荷的关系 ,讨论了轴向载荷 、转动惯量和剪切变形对简支梁固有频率的影响 ,对梁的结构设计 ,特别是对强迫振动下的实时控制 ,在工程中具有一定 的实用价值 。
中图分类号 : O 327文献标识码 : A在道路 、桥梁工程中许多既受横向载荷 、又受轴向载荷的构件 , 本文以轴向载荷作用下简支梁为例 , 通过具体实例 , 应用能量法求得简支梁固有频率与轴向载荷之间的关系 , 作出了一阶固有频率 ω~与轴向载荷 P 1 的曲线图 ; 对梁的高阶振型 , 较详细地分析了转动惯量与剪切变形对简支梁固有频率的影响 。
轴向载荷与简支梁固有频率的关系当梁的长度远大于截面尺寸 ,或者在分析细长梁的低阶振型情况下 ,由于梁的变形主要是弯曲变形 ,在 低频振动时可以忽略剪切变形以及截面绕中性轴转动惯量的影响 ,这种梁称为伯努利 —欧拉梁 (Ber n o u lli -Euler Bea m ) 。
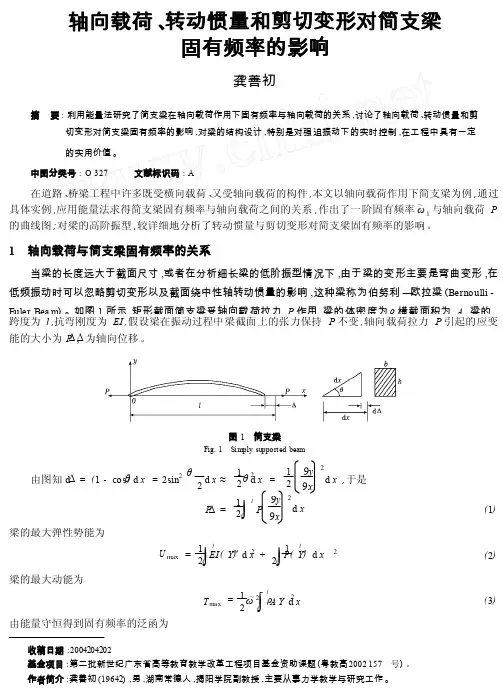
如图 1 所示 , 矩形截面简支梁受轴向载荷拉力 P 作用 , 梁的体密度为 ρ, 横截面积为 A , 梁的 1 跨度为 l , 抗弯刚度为 EI , 假设梁在振动过程中梁截面上的张力保持 P 不变 , 轴向载荷拉力 能的大小为 PΔ ,Δ 为轴向位移 。
P 引起的应变图 1 简支梁Fig. 1 Si mply suppo r t ed beam29y由图知 d Δ = ( 1 - co s θ) d x = 2sin 2 θ1 22d x ≈ θd x = 1 d x , 于是 2 2 29x 9y l 1 2∫0 P Δ = Pd x ( 1)9x梁的最大弹性势能为l l 1 1 =2∫0 EI ( Y ″) d x + 2∫0 P ( Y ′) d x2 2( 2)U max 梁的最大动能为l 1 ω 2 ∫~ 2 2ρA Y d x ( 3)T m ax= 由能量守恒得到固有频率的泛函为收稿日期 :2004204202基金项目 :第二批新世纪广东省高等教育教学改革工程项目基金资助课题 (粤教高 2002 157 号) 。
二维欧拉梁单元公式
二维欧拉梁单元是一种常用的结构力学中的有限元单元,用于分析和计算梁结构的变形和应力。
二维欧拉梁单元的公式可以表示为:
在局部坐标系下,欧拉梁单元的位移场可以由以下公式表示:\[ u(x) = a_1 + a_2x + a_3x^2 + a_4x^3 \]
\[ v(x) = b_1 + b_2x + b_3x^2 + b_4x^3 \]
其中,\( u(x) \) 和 \( v(x) \) 分别代表梁在 x 方向和 y 方向的位移,\( x \) 代表梁的局部坐标。
欧拉梁单元的刚度矩阵和载荷矢量可以由以下公式表示:
刚度矩阵:
\[ \begin{bmatrix} K_{11} & K_{12} \\ K_{21} & K_{22}
\end{bmatrix} \]
载荷矢量:
\[ \begin{bmatrix} F_1 \\ F_2 \end{bmatrix} \]
其中,\( K_{11} \)、\( K_{12} \)、\( K_{21} \) 和 \( K_{22} \) 分别代表刚度矩阵的元素,\( F_1 \) 和 \( F_2 \) 分别代表载荷矢量的元素。
刚度矩阵和载荷矢量的具体计算公式可以通过对欧拉梁单元的形函数进行合适的求导和积分得到。
带格架5×5燃料棒束流致振动特性数值研究陈德奇;刘海东;黄彦平;袁德文;王艳林;高虹【摘要】核反应堆中,流动的冷却剂轴向冲刷燃料棒可能导致其振动,产生微动磨损,对整个核电厂的安全性以及经济性有重要影响.带格架棒束流致振动特性的研究是微动磨损研究的基础.本文基于欧拉-伯努利(Euler-Bemoulli)梁理论,采用动网格技术,通过Fluent实现流固耦合数值计算,并与不考虑振动耦合时的流场分布进行比较分析.重点分析了湍流强度、轴向速度等主要流体参数对振动位移均方根的影响,以及轴向流中流致振动机理.结果表明:燃料棒的振动位移均方根随着流速的增大而增大;燃料棒径向两侧的压力脉动是造成振动的因素之一;定位格架改变了较大振动出现的位置,明显加强了振动响应.%In nuclear reactor,subjected to the axial flowing coolant,the fuel rod may vibrate.This vibration can cause cladding deformation and fretting wear that have an important effect on safety and economy of the entire nuclear power plant.Study on the vibration characteristics of the fuel rods with spacer grid is necessary for studying the fretting wear.In this paper,based on the Euler-Bernoulli beam theory,dynamic mesh technique was used to deal with the fluid-structure interaction numerical simulation by Fluent.The influence of the main fluid parameters on the RMS (root mean square) of vibration displacement,such as turbulence intensity and axial velocity,and the mechanism of flow-induced vibration in axial flow were analyzed in detail.The numerical results show that the RMS of the vibration displacement of the fuel rod increases with the flow velocity,and the pressure pulsation on both sides of the fuel rod is one of the factors causing the vibration.The existence of thespacer grid changes the position of the large vibration displacement and significantly enhances the vibration response.【期刊名称】《原子能科学技术》【年(卷),期】2018(052)005【总页数】7页(P954-960)【关键词】核反应堆;燃料组件;流致振动;数值研究【作者】陈德奇;刘海东;黄彦平;袁德文;王艳林;高虹【作者单位】中国核动力研究设计院中核核反应堆热工水力技术重点实验室,四川成都610041;低品位能源利用技术及系统教育部重点实验室,重庆大学,重庆400044;低品位能源利用技术及系统教育部重点实验室,重庆大学,重庆400044;中国核动力研究设计院中核核反应堆热工水力技术重点实验室,四川成都610041;中国核动力研究设计院中核核反应堆热工水力技术重点实验室,四川成都610041;中国核动力研究设计院中核核反应堆热工水力技术重点实验室,四川成都610041;低品位能源利用技术及系统教育部重点实验室,重庆大学,重庆400044【正文语种】中文【中图分类】TL334流致振动引起的微动磨损是目前压水堆中导致燃料棒失效的最主要因素[1]。
材料力学欧拉公式欧拉公式是数学中的一个重要公式,描述了材料在应变和应力作用下的力学行为。
它是由瑞士数学家欧拉(Leonhard Euler)在18世纪中期提出的。
欧拉公式在应用于材料力学中,可以帮助我们理解和预测材料在力学加载下的响应行为。
在材料力学中,欧拉公式描述了杆件的弯曲行为。
杆件是一种具有一维长度和截面的结构,常常用于支撑物体或传递力量。
当在杆件的两端施加外力时,杆件会发生弯曲变形。
欧拉公式可以用来计算杆件的弯曲刚度和最大弯曲应力。
欧拉公式的基本形式是:(1)σ=E*ε*I/y其中,σ是杆件中心的弯曲应力,E是材料的弹性模量,ε是杆件的应变,I是截面的惯性矩,y是杆件绕截面中心轴的最大距离。
欧拉公式的本质是通过将杆件上的弯矩平衡和变形方程结合起来,得出了杆件的弯曲应力与外力和几何特性之间的关系。
这个公式可以帮助我们分析杆件在弯曲过程中的最大弯曲应力和应变分布。
根据欧拉公式,当杆件的应变达到临界值时,杆件发生屈曲,即出现了弹性失稳。
这个临界值可以通过欧拉公式进行计算,得出屈曲载荷。
除了上述的基本欧拉公式,还有一些拓展的欧拉公式可以用来分析不同类型的杆件和加载情况。
例如,对于长杆件的弯曲行为,可以使用欧拉公式的长杆件版本,它考虑了杆件端部的约束效应。
此外,欧拉公式还可以应用于其他力学问题中,如柱子的稳定性分析和梁的弯曲问题。
这些应用都基于欧拉公式中应变和应力之间的关系,可以帮助我们更好地理解和解决材料力学中的问题。
总之,欧拉公式是材料力学中的一项重要工具,它描述了杆件在弯曲加载下的应变和应力之间的关系。
通过欧拉公式,我们可以计算杆件的弯曲刚度、最大弯曲应力和屈曲载荷等重要参数。
欧拉公式的应用不仅局限于杆件,还可以扩展到其他材料力学问题中。
它对于深入理解材料的力学行为和解决实际工程问题具有重要意义。
考虑轴向力影响欧拉梁动力反应分析一、前言在前面的学习过程中,我们学习了多自由度离散体系的任意结构动力反应分析,但是对实际结构来说,本质上都是具有分布质量的弹性体,即分布参数体系。
要描述这些弹性体系任意瞬时的空间位置,严格上说需要无限多个广义坐标,这样的体系称为无限自由度体系。
要严格描述无限自由度体系的振动,需要建立位移关于空间位置坐标和时间两个独立变量的连续函数,因此,描述无限自由度体系的运动方程为偏微分方程。
连续结构体系可按描绘它们动力行为分布所需的独立变量数来分类。
但本文讨论的梁结构或轴向变形的杆,属于一维结构,它们的物理性质和动力反应可用单独一个坐标,于是这种体系的偏微分方程只包含两个独立变量,即时间和沿轴的距离。
二、考虑轴向力影响的梁的弯曲振动方程已知:一非均匀简支梁,沿梁长度x 方向变化的抗弯刚度EI(x),单位长度的质量m (x ),作用在梁上的横向荷载p (x ,t ),作用在梁端不随时间变化的轴向力N 以及梁的横向位移u (x ,t )。
求:弯曲梁的弯曲振动方程。
步骤:1、假定梁的运动为平面弯曲,并假定变形前梁的横截面在变形后仍保持为平面,且垂直于变形后的梁轴线,即符合弯曲的平截面假定。
2、取梁上任一截面x 处的微段dx 为隔离体。
作用在其两截面上有弯矩M ,剪力Q,分布外荷载P (x ,t )和假定的惯性力22),()()(f )(df tt x u x m dx x x I I ∂∂==。
3、由竖向力平衡条件,得第一个平衡方程:)2..(..............................),()(),()1(..........0)(]),()(),([2222t t x u x m t x P x Q dx x QQ dx tt x u x m t x P Q ∂∂+-=∂∂=∂∂+-∂∂--整理得:4、由力矩平衡条件,对微段右截面和x 轴的交点取矩,得到第二个平衡方程)3.......(..........0)()](),()(),([21),(222=∂∂+-∂∂--∂∂++dx x M M dx tt x u x m t x P t t x u N Qdx M整理得: )4....(..............................),(tt x u N Q x M ∂∂+=∂∂ 将(2)代入(4)得)5.(..........),(),()(),(222222tt x u N t t x u x m t x P x M ∂∂+∂∂+-=∂∂ 根据梁的初等变形理论,梁的弯矩和曲率的关系式为:)6......(....................),()(22x t x u x EI M ∂∂-= 将(6)代入(5)得:)7....().........,(]),()([),(),()(22222222t x P xt x u x EI x x t x u N t t x u x m =∂∂∂∂+∂∂+∂∂ 上式即为考虑轴向力影响的梁的弯曲振动方程。
对于等截面梁,式(7)可以简化为:)8....().........,(),(),(),(442222t x P x t x u EI x t x u N t t x u m =∂∂+∂∂+∂∂三、梁的自振频率和振型分析轴向力影响欧拉梁的固有振动特性,这里仅讨论等截面直梁的情况。
这时,梁的自由振动运动方程为式(8)的齐次方程,即:)9..(..........0),(),(),(442222=∂∂+∂∂+∂∂x t x u EI x t x u N t t x u m用“’”表示对位置x 的导数,用“∙”表示对时间t 的导数,则(9)式可写成)10.(........................................0''''''u u m =++∙∙EIu N 用分离变量法求解,假定解得形式为)11.......(..............................).........()(),(t q x t x u φ=式中,)(x φ表示振动的形状,它不随时间而变化,)(t q 表示随时间变化的振幅。
将式(11)代入(10),得到:)12...(....................0)()('''')()('')(q(t)m =++∙∙t q x EI t q x N x φφφ公式两端同时除以)()(t q x φ得:)13........(....................)(q(t)m )()('''')()(''C t q x x EI x x N =-=+∙∙φφφφ 式中C=m 2ω由此得到两个独立的常微分方程:)15........(..................................................0)(q )()14..(..............................0)('''')(''22=+=-+∙∙t t q m x EI x N ωφωφφ方程(15)是单自由度体系无阻尼自由振动方程,其解为)16(........................................cos sin )(11t B t A t q ωω+=式中的系数可以根据初始位移q(0)和初始速度)0(q ∙确定,即)17.(........................................cos )0(sin )0()(t q t q t q ωωω+=∙方程(14)是四阶微分方程,设其解得形式为)18.(............................................................)(sx Ce x =φ将式(18)代入式(14),得EIN g EI ma ce a s g s sx ===-+2244224,)19.(........................................0)(ω式中解得)20....(..................................................,4,3,2,1εδ±±=i s其中)21..( (2))4(,2)4(2214422144g g a g g a -+=++=εδ将(20)代入(18)式,并用三角函数和双曲函数等式代替指数函数得)22...(..........cosh sinh cos sin )(x D x C x B x A x εεδδφ+++=式中四个常数A~D 决定梁振动的形状和振幅,它们可以利用梁端的边界条件确定。
对于每一个可能指定的轴向力值,方程(22)给出了相应梁的振动形式。
四、振型的正交性根据功的互等定理,第n 阶振型的惯性力在第m 阶振型位移上所做的功等于第m 阶振型的惯性力在第n 阶振型位移上所作的功。
用数学表达式可表示为:)23.........(....................),()(),()(,0,0dx t x f x u dx t x f x um I Ln n I Lmq⎰⎰=当梁以某种振型振动时,其各点的位移可表示为:)25..(..................................................sin )(),()24....(..................................................sin )(),(t q x t x u t q x t x u m m m m n n n n ωφωφ==由振型引起的相应的分布惯性力为)27.....(..........sin )()(),()(),()26.......(..........sin )()(),()(),(222,222,t q x x m tt x u x m t x f t q x x m tt x u x m t x f m m m m m m I n n n n n n I ωφωωφω=∂∂-==∂∂-= 将以上四式的幅值代入式(23)得)28.(..........)()()()()()(22dx q x x m q x dx q x x m q x m m m n n Ln nn m m Lφωφφωφ⎰⎰=即)29.........(........................................0)()()()(022=-⎰dx x x m x m Ln mn φφωω对于一般工程结构,22mn ωω≠,则有)30......(............................................................0)()()(0=⎰dx x x m x m Lnφφ这就是分布参数简支梁关于分布质量的正交条件。
如果用分布刚度作为加权函数,可以得到分布参数体系关于振型的第二个正交条件对于有轴向力的变截面梁,自由运动方程为)31....(..............................0]),()([),(),(22222222=∂∂∂∂+∂∂+∂∂x t x u x EI x x t x u N t t x u m左边第一项)32........(..........sin )()(),()(222t q x x m tt x u x m n n n n ωφω-=∂∂ 左边第二项)33.........(........................................sin ),(2222t q dx d N x t x u N n n n ωφ=∂∂ 左边第三项)34........(sin ])([]),()([22222222t q dx d x EI dx d x t x u x EI x n n n ωφ=∂∂∂∂ 则式(31)可写成)35.......(....................).........()(])([2222222x x m dxd N dx d x EI dx d n n n n φωφφ=+将式(35)代入(30)得:{})36....(..............................0])([)(222222=+⎰dx dx d N dx d x EI dx d x n n Lm φφφ式(36)即是受轴向力影响的简支梁关于分布刚度的正交条件。