条纹结构光三维测量中多频相位展开与高亮抑制方法研究
- 格式:doc
- 大小:12.43 KB
- 文档页数:2
第33卷第5期2020年10月Vol.33 No.5Oct.2020大学物理实验PHYSICAL EXPERIMENT OF COLLEGE文章编号:1007-2934(2020)05-0005-06基于改进三步相移法的结构光三维动态扫描系统陈文娟**,高超,李迎春,唐子淇,胡姗姗收稿日期:2020-09-04基金项目:中国石油大学(华东)大学生创新创业训练项目(20190468);中国石油大学(华东)重点教学实验技术改革项目(SZ201822);中国石油大学(华东)校级重点教学改革项目(JY-A201820)*通讯联系人(中国石油大学(华东)理学院,山东青岛266580)摘 要:提出了一种改进型三步相移法的结构光三维动态扫描系统,将三步相移图的获取方式由 条纹移动的被动式获取转变为物体移动的主动式获取。
结合数字图像处理技术,根据物体运动速度与 相移量的关系控制摄像头准确拍摄三步相移图片,无须投影多幅条纹和使用复杂算法,即可快速灵活地实现简单运动物体的三维重建。
在MATLAB 中仿真一个运动半球体进行结构光动态扫描实验,并使用 自主开发的软件进行三维重建。
结果表明,该方法获取的三步相移图像能够较好地还原简单运动物体的三维形状,对低成本相机的动态三维成像的研究具有一定的参考价值。
关 键 词:结构光;条纹投影;三维扫描;三步相移中图分类号:O4-33 文献标志码:A D0I :10.14139/22-1228.2020.05.002三维扫描成像将客观物理世界中的物体迅速转化为计算机中的三维数字像,从而获取物体三1 原理分析维形态和纹理信息,广泛应用于工业设计、文物恢复、虚拟现实以及产品逆向工程等多个领域[1] o其中结构光三维扫描技术具有非接触、无损伤、高精度、全场测量的优点,成为三维成像技术中的主 流光学技术之一[2]o 然而,目前基于条纹相位测量的结构光三维扫描系统大部分通过投射多组光栅条纹进行静态物体成像,对动态物体成像时投 影与拍摄装置的速度与性能要求高、结构复杂且算法繁琐⑶。
结构光相位解包裹在现代科技的发展中,结构光相位解包裹技术扮演着重要的角色。
它是一种通过结构光投射和图像处理来还原物体表面形态的方法。
本文将详细介绍结构光相位解包裹的原理、应用以及未来发展趋势。
一、原理结构光相位解包裹的原理基于光的干涉现象。
当平行光束照射到物体表面上时,会发生反射、折射等现象,导致光程差的变化。
通过使用光栅或投射特定的光斑模式,可在物体表面形成相位信息。
然后,通过图像采集和数字图像处理算法,可以将相位信息转化为物体表面形态信息。
二、应用结构光相位解包裹技术在多个领域有着广泛的应用。
以下列举几个典型的应用案例。
1. 三维形貌测量:结构光相位解包裹技术可以实现对物体表面形态的高精度测量。
它被广泛应用于制造业、医疗器械、文物保护等领域。
通过获取物体表面的形貌信息,可以进行产品质量检测、医学诊断以及文物保护等工作。
2. 姿态测量:结构光相位解包裹技术还可用于姿态测量。
通过投射特定的光斑模式,可以获取物体的姿态信息,如旋转角度、变形程度等。
这在机器人、虚拟现实等领域有着重要的应用,可以帮助机器人进行精确的定位和操作,提高虚拟现实的交互体验。
3. 表面缺陷检测:结构光相位解包裹技术还可以用于表面缺陷检测。
通过对物体表面进行高精度测量,可以检测出表面的微小缺陷,如凹坑、裂纹等。
这在汽车、航空航天等行业有着重要的应用,可以提高产品质量和安全性。
三、发展趋势随着科技的不断进步,结构光相位解包裹技术也在不断发展。
以下是未来发展的几个趋势。
1. 高精度和高速度:未来的结构光相位解包裹技术将更加注重精度和速度的提升。
通过改进光栅设计、优化图像处理算法等手段,可以实现更高精度和更快速度的测量。
2. 多模式投射:未来的结构光相位解包裹技术将不仅局限于单一的光斑模式,而是采用多模式投射。
通过投射多种光斑模式,可以获取更多的物体信息,提高测量的准确性和可靠性。
3. 无损检测:未来的结构光相位解包裹技术将更加注重无损检测的应用。
基于单目结构光的大物体三维测量关键方法的研究伏燕军;翁凌霄;胡茗【摘要】在单目结构光的三维测量系统中,由于投影仪倾斜投影,参考平面上的条纹周期展宽,给测量带来误差,降低了测量精度.同时受大物体自身几何和形貌等因素的影响,以及相交轴测量系统的限制,其单幅面测量范围受限,很难一次测量大物体完整的三维形貌,而且在测量大物体时,摄像机镜头非线性畸变也影响测量精度.根据参考平面上光栅条纹的周期变化规律,提出了一种适用性好、方便快捷的条纹周期校正的理论模型,在此基础上,提出了基于条纹周期校正的四步相移法的理论模型,进而提出了基于条纹周期校正的时间相位展开法的理论模型.采用摄像机镜头非线性畸变校正模型,提高测量精度.在被测物表面粘贴标志点,获取其三维坐标,利用SVD分解和L-M优化算法求取转换矩阵,并在设定的全局坐标系下实现三维图像拼接,采用线性加权算法,对重叠区域进行图像融合.实验结果表明,X轴的拼接误差为0.14 mm,Y 轴的拼接误差为0.16 mm,Z轴的拼接误差为0.19 mm,其拼接误差均在测量误差允许范围之内.%In three-dimensional measurement system based on structured light,the grating fringe cycle is broadened on the reference surface with the reason of the oblique-angle,which brings errors to the measurement and reduces the accuracy.At the same time,because of large objects'geometry and morphology and other factors,as well as the limit of the intersecting axis projection system,the single shape measuring range is limited.It is difficult to measure large objects'complete shape in one time.And when measuring large objects,camera lens' nonlinear distortion also affects the measurement accuracy.According to the periodic pattern of grating stripes on the reference plane,a well-fitted,convenient and quickstripe cycle correction method was proposed.Based on the cycle correction method,a theoretical model of four-step phase shift method was put up,and then a theoretical model of time phase unwrapping based on fringe period correction was proposed.After that,the lens distortion correction model was used to improve the measurement accuracy.With the mark points pasted on the surface of objects,the three-dimensional coordinates of them were got,as well as the transformation matrix by using the singular value decomposition (SVD) and Levenberg-Marquardt (L-M) optimization algorithm,and three-dimensional image mosaic was realized under the global coordinate system.Finally,the linear weighting algorithm was used to realize the image fusion of overlapping areas.Experimental results show that the registration errors in x,y,z axes are 0.14 mm,0.16 mm,and 0.19 mm respectively,which all meet the requirements.【期刊名称】《应用光学》【年(卷),期】2018(039)002【总页数】8页(P212-219)【关键词】单目结构光;大物体;周期校正;三维拼接;标志点【作者】伏燕军;翁凌霄;胡茗【作者单位】南昌工学院,江西南昌 330108;南昌工学院,江西南昌 330108;南昌工学院,江西南昌 330108【正文语种】中文【中图分类】TN206;TB92随着现代工业技术的发展,大范围、高精度、非接触、动态的三维测量成为工业测量的发展方向。
摩尔条纹光三维重构1. 引言摩尔条纹光三维重构是一种通过光学原理和计算机图像处理技术,对物体表面的微小高度差异进行测量和重建的方法。
该技术广泛应用于工业检测、生物医学研究、文物保护等领域。
本文将对摩尔条纹光三维重构的原理、方法和应用进行详细介绍。
2. 摩尔条纹原理摩尔条纹是指在两个光波的干涉中产生的明暗相间的条纹图案。
当两束光波相遇时,由于光波的干涉,会形成一系列的亮暗交替的条纹。
这些条纹的形成与光波的相位差有关,而相位差又与物体表面的高度差相关。
在摩尔条纹光三维重构中,通常使用投影光源照射物体表面,通过摄像机捕捉到的摩尔条纹图案来获取物体表面的高度信息。
通过分析摩尔条纹的形态和变化,可以计算出物体表面的高度差异,从而实现三维重建。
3. 摩尔条纹光三维重构方法3.1 投影模式摩尔条纹光三维重构中常用的投影模式有平行光投影和相移投影两种。
平行光投影是指使用平行光源照射物体表面,通过摄像机捕捉到的摩尔条纹图案进行分析。
这种方法简单易行,适用于较大的物体和粗糙的表面。
相移投影是指通过改变投影光源的相位差,使得摄像机捕捉到的摩尔条纹图案在时间上有所变化。
通过分析不同相位差下的摩尔条纹图案,可以获取更精确的高度信息。
相移投影方法适用于对物体表面微小细节的测量和重建。
3.2 图像处理与分析摩尔条纹光三维重构中的图像处理与分析是实现三维重建的关键步骤。
主要包括图像预处理、相位解包、高度计算等过程。
图像预处理是指对摄像机捕捉到的摩尔条纹图像进行去噪、增强和校正等处理,以提高图像质量和准确性。
相位解包是指通过对摩尔条纹图像进行相位解析,计算出每个像素点对应的相位差。
常用的相位解包算法包括Fourier变换、Hilbert变换等。
高度计算是指利用相位差信息,通过一定的数学模型和算法,计算出每个像素点对应的物体表面高度差。
常用的高度计算方法有三步相移法、空间相位法等。
3.3 三维重建与可视化通过对摩尔条纹图像的处理和分析,得到物体表面的高度差信息后,可以进行三维重建和可视化。
基于多频外差原理的三维测量技术黄燕钧;李中伟;史玉升;王从军【期刊名称】《新技术新工艺》【年(卷),期】2008(000)012【摘要】提出了一种基于外差原理的三维测量技术,该技术由相位移法、外差原理和双目立体视觉3部分组成.相位移法和外差原理相结合能够自动完成相位展开,同时保持相移法原有的相位求解精度;然后根据相位展开后的相位图,使用双目立体视觉原理自动完成左、右对应点的立体匹配和被测物体的点云重构.利用基于多频外差原理的三维测量技术建立了一套三维测量系统,该系统由2个CCD摄像机和1个DLP投影仪组成.利用上述系统对人脸模型进行测量试验,测量结果表明该系统能够完成复杂自由曲面的测量,测量数据完整可靠.【总页数】4页(P37-40)【作者】黄燕钧;李中伟;史玉升;王从军【作者单位】梧州学院,计算机与电子信息工程系,广西,梧州,543002;华中科技大学,材料成形与模具技术国家重点试验室,湖北,武汉,430074;华中科技大学,材料成形与模具技术国家重点试验室,湖北,武汉,430074;华中科技大学,材料成形与模具技术国家重点试验室,湖北,武汉,430074;华中科技大学,材料成形与模具技术国家重点试验室,湖北,武汉,430074【正文语种】中文【中图分类】TG806【相关文献】1.多频外差相移三维测量关键技术 [J], 宋雷;岳晓峰;王乐2.基于多频外差相移结构光的三维测量系统 [J], 郭进;陈小宁3.基于多频外差原理的相位校正及匹配方法研究 [J], 黄亚楠;娄小平4.一种基于多频外差的相位解包裹方法 [J], 韩玉;杨延竹;苏雪龙5.外差式多频相移技术的三维光学点云测量研究 [J], 梁晋;肖振中;臧顺来;梁新合因版权原因,仅展示原文概要,查看原文内容请购买。
条纹结构光原理
条纹结构光原理
条纹结构光是一种通过投射周期性条纹图案来测量物体表面形态和位
移的技术。
其原理基于光的干涉现象和相位差的测量。
首先,将一束平行光线通过一个狭缝或透镜,使其成为一束平行的光线。
然后,将这束平行光线照射到一个投影镜面上。
投影镜面上放置
有一个具有周期性条纹图案的透明栅格。
当这个透明栅格被照射时,
它会在物体表面形成一系列周期性的亮暗条纹。
当物体表面发生微小的形变或者位移时,这些条纹也会随之发生变化。
通过观察这些变化,可以计算出物体表面形态和位移信息。
具体来说,当物体表面发生形变时,与之相对应的亮暗条纹也会发生相应的偏移
或扭曲。
这种偏移或扭曲产生了不同点处的相位差。
为了测量这些相位差,需要使用干涉仪器来进行精确测量。
常用的干
涉仪器包括双臂干涉仪、Michelson干涉仪和Fizeau干涉仪等。
这些干涉仪器可以将光的相位差转化为电信号,从而实现对物体表面形态
和位移的测量。
总之,条纹结构光技术是一种基于光学原理和干涉现象的测量技术,其通过投射周期性条纹图案来测量物体表面形态和位移信息。
通过观察条纹图案的变化,并使用干涉仪器进行精确测量,可以得到高精度的物体表面形态和位移信息。
三维结构光格雷码和相移码
三维结构光是一种利用结构化光投影和图像处理技术来实现对三维物体进行测量、重建或识别的方法。
在三维结构光中,常用到的编码方式包括格雷码和相移码。
1. 结构光格雷码(Structured Light Gray Code):
结构光格雷码是一种编码技术,用于在三维扫描和测量中标识和定位投影到目标物体表面的光栅或光条纹。
它将二进制格雷码 (Gray Code)应用于光条纹或光斑的投影序列中。
格雷码与普通二进制码不同,相邻的码只有一个位元改变,可以减少读取错误和歧义。
在三维结构光中,结构光格雷码常用于投影独特的光栅或光条纹序列,通过相机捕捉被投影物体表面的变化,然后利用图像处理技术解码,从而获得物体表面的深度或三维信息。
2. 结构光相移码(Structured Light Phase Shift):
相移法是一种三维测量技术,利用投影相移图案的变化来计算物体表面的深度和形状。
相移码通常指的是相移法中采用的编码方式,通过改变投影的光栅或图案相位来获得三维信息。
相移码的方法是在短时间内连续投影多个具有不同相位的图案到目标物体上,然后利用相机捕捉这些图案的变化。
通过分析不同相位下图案的变化,可以推导出物体表面在空间中的深度和形状。
这两种编码方式在三维结构光领域中都有着广泛的应用,用于测量和重建物体的三维形状。
它们都需要相机、投影系统和图像处理算法的支持,以实现对物体表面的高精度测量和三维重建。
1/ 1。
基于多频外差原理的三维测量技术黄燕钧1,2,李中伟2,史玉升2,王从军2(1.梧州学院计算机与电子信息工程系,广西梧州543002;2.华中科技大学材料成形与模具技术国家重点试验室,湖北武汉430074)摘 要:提出了一种基于外差原理的三维测量技术,该技术由相位移法、外差原理和双目立体视觉3部分组成。
相位移法和外差原理相结合能够自动完成相位展开,同时保持相移法原有的相位求解精度;然后根据相位展开后的相位图,使用双目立体视觉原理自动完成左、右对应点的立体匹配和被测物体的点云重构。
利用基于多频外差原理的三维测量技术建立了一套三维测量系统,该系统由2个CCD摄像机和1个DLP投影仪组成。
利用上述系统对人脸模型进行测量试验,测量结果表明该系统能够完成复杂自由曲面的测量,测量数据完整可靠。
关键词:光学测量;相位测量;外差原理;相位展开中图分类号:T G806 文献标志码:A相位测量技术是一种重要的三维测量方法,具有较高的测量精度,近年来,国内外众多学者在这一领域进行了大量的研究。
利用相位法原理进行三维物体轮廓测量,关键是要得到光栅的相位信息,然后从相位中提取出所包含的高度信息。
目前获得相位的方法有很多种,其中最常用的方法有相移(Phase-Shifting)法和FT P(Fourier T ransfo rm Pro filom etry)法。
虽然这2种方法所采取的求解过程不同,但是最终都是利用反正切函数求解相位值,因此直接得到的相位都包含在区间[-PI,P I]内,这样得到的数据并非相位的真实值,需要将包裹的相位解开,得到真实的相位值。
目前常用的相位展开方法为格雷(Gr ay)码法,其优点是条纹定级非常方便,直接根据黑白分布求得格雷码,再解码便获成功,算法实现简单,易于实现产品化。
但是格雷码法存在以下缺点:1)格雷码只是用于对测量幅面的分级,对计算物体的相位没有帮助,无法提高测量精度;2)对测量工件的表面明暗比较敏感,黑白交界处容易受到噪声的干扰,一般要喷显影剂才能测量,无法测量较暗的工件,无法测量表面剧烈变化的工件。
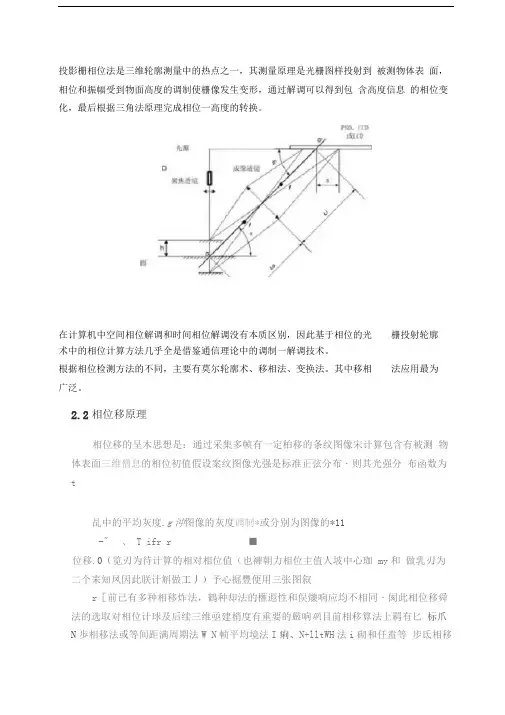
投影栅相位法是三维轮廓测量中的热点之一,其测量原理是光栅图样投射到被测物体表面,相位和振幅受到物面高度的调制使栅像发生变形,通过解调可以得到包含高度信息的相位变化,最后根据三角法原理完成相位一高度的转换。
在计算机中空间相位解调和时间相位解调没有本质区别,因此基于相位的光栅投射轮廓术中的相位计算方法几乎全是借鉴通信理论中的调制一解调技术。
根据相位检测方法的不同,主要有莫尔轮廓术、移相法、变换法。
其中移相法应用最为广泛。
2.2相位移原理相位移的呈木思想是:通过采集多帧有一定柏移的条纹图像宋计算包含有被测物体表面三维僧息的相位初值假设案纹图像光强是标准正弦分布・则其光强分布函数为t乩中的平均灰度.g沖图像的灰度调制*或分别为图像的*11-" 、 T ifr r ■位移.0(览刃为待计算的相对相位值(也褲朝力相位主值人坡中心珈 my和做乳刃为二个耒知凤因此朕计斛做工丿)予心掘豐便用三张图叙r[前己有多种相移炸法,鶴种却法的權遐性和俣爍响应均不相同・阂此相位移舜法的选取对相位计球及后续三维亟建梢度有重要的厳响叭目前相移算法上羁有匕标爪N歩相移法或等间距满周期法W N帧平均境法I痢、N+lltWH法i砌和任盍等步氐相移釁法回^等。
2.3相位展开算法通过相位移养法il 坏出的相位主值0(*」)在…个相位剧期内是唯 的,但3-liP左滋个测蛍空间内冇多个)tiff 条纹,0仃』)£锯齿状分布.必须对空间点的相位主 值进仃相位展开御到连续的绝对相位值5心刃1呦,W2.2所示.与以上的牢间相位展开算法相对应.Huntley 等提出了时间相位展开方法(Temporal Phase Unwrapping Algorithm )171' 3,役圖。
这种方法通过投射 系列不同频率 的条纹图到被测协体表面.并同步拍摄得到组受被测物休表面调制的而变形光栅 条纹图,然后将每.点的相位在这个序列上独屯进行计算,从原理上避免了误左的传 掘。
条纹结构光三维测量中多频相位展开与高亮抑制方法研究
条纹结构光三维测量技术以其高准确度、高效率和非接触的优点在高速检测、
产品开发、质量控制、反向工程等领域得到广泛的应用和发展。其测量准确度随
着硬件设备和图像处理技术的发展而大幅度提高,但针对复杂被测物,其容错能
力、抗干扰能力较弱,从而制约了其实用性。为此,本文研究采用普通条纹结构光
三维测量方法,针对复杂被测物受相位展开方法和表面特性影响带来的测量误差,
研究多频相位展开方法、表面高亮抑制方法及其装置。1.本文对于目前展开相位
的复杂计算,范围有限和波长位置跃跳导致大误差的问题,提出一种双频条纹结
构光相位展开方法,建立其数学模型。
进而,针对实际应用环境,对提出的相位展开方法进行了误差分析,推导其误
差容限。通过三维测量与抗干扰能力仿真验证实验,在有干扰和无干扰环境下,
验证双频相位展开数学模型和误差分析的正确性。2.针对现有多频模式时间相位
展开方法,即多频分层、多频外差和多频数论,通过测量原理阐述、测量误差分析、
数值仿真实验与本文双频条纹结构光相位展开方法进行对比研究。鉴于投射图案
起止点存在跃跳误差问题,提出一种错位双频条纹结构光相位展开方法,完成其
理论分析和数值仿真验证。
3.为进一步拓展条纹结构光量程,或在同量程范围内提高相位展开方法的抗
干扰能力,将双频相位展开方法拓展到三频相位展开方法。建立其数学模型,对提
出的相位展开方法进行误差分析,推导其误差容限。分析条纹结构光组合的等效
波长,给出最优频率组合准则。通过三维测量与抗干扰能力仿真验证实验,在有干
扰和无干扰的仿真环境下,验证三频相位展开数学模型和误差分析的正确性,以
及在误差、抗干扰能力方面的有效性。
4.针对条纹结构光测量过程中高亮区域导致测量失效,提出基于线性扩散板
的高亮抑制方法,推导出入射光线经过线性扩散板之后的辐射照度与高亮点反射
光线的辐射亮度表达式,建立了基于辐射度量学的线性扩散板抑制高亮原理模型。
为进一步消除高亮区域,针对现有高亮抑制算法存在复杂的图像分割问题,提出
反射分量分离理论与基于优先级的像素填补方法相结合的强反射表面高亮抑制
图像处理算法。5.提出和实现条纹结构光三维测量的高亮抑制方案和装置,针对
典型表面和复杂表面进行三维测量实验。实验表明,双频和三频条纹结构光相位
展开方法能有效抑制跃跳误差、运算简洁、测量效率较高。
进行了基于线性扩散板的物体高亮抑制实验与基于反射分量分离与优先级
像素填补方法相结合的高亮抑制实验。对不同形状、不同光滑度的强反射表面物
体在进行三维重构实验和定性与定量分析。本文研究为条纹结构光三维测量相位
展开和高亮抑制提供了理论支撑和实验依据,对促进条纹结构光三维测量技术工
程应用具有实际意义。