探测机器人毕业设计
- 格式:doc
- 大小:1.02 MB
- 文档页数:31
三自由度机器人设计毕业设计一、前言随着工业自动化水平的不断提高,机器人技术在生产制造领域中发挥着越来越重要的作用。
作为机器人技术的一个重要组成部分,三自由度机器人因其结构简单、控制方便等特点,被广泛应用于装配、焊接、喷涂等工业领域。
本文以三自由度机器人设计与控制为主题,围绕机械结构设计、运动学建模、控制算法设计等方面展开研究与分析,旨在为相关领域的研究提供一定的参考和借鉴。
二、机械结构设计三自由度机器人通常包括基座、臂部和末端执行器等部件,其机械结构设计直接关系到机器人的稳定性、精度和工作空间。
在本课题中,我们将采用柔性连接的直角坐标系结构设计,通过在关节处加装弹簧和减震器以减小振动,提高定位精度。
三、运动学建模运动学建模是机器人设计中的关键环节,它描述了机器人在工作空间内的姿态和位置。
本文将采用DH参数法建立机器人的坐标系变换矩阵,通过正运动学和逆运动学方程描述机器人的工作空间关系,并利用数值模拟软件对其进行验证和分析。
四、控制算法设计在机器人工作中,控制算法起着至关重要的作用。
为了保证机器人在工作过程中能够实现高效、精准地运动,我们将设计基于PID控制的位置控制算法,结合轨迹规划和避障算法,实现机器人的自动抓取和装配功能。
五、仿真与实验在设计完成后,我们将通过仿真软件对机器人进行工作空间分析和运动学验证,同时搭建实验平台,验证控制算法的有效性和稳定性。
通过比对仿真和实验结果,不断优化和改进机器人设计和控制算法,使其更加贴近实际工程应用需求。
六、结论与展望通过本课题的研究与分析,我们得出了一系列关于三自由度机器人设计与控制的结论和成果。
未来,我们将进一步深入研究机器人的感知技术、智能控制算法等方面,为实现更加智能化、高效化的工业机器人应用提供更多的技术支持和解决方案。
七、参考文献[1] 张强. 机器人技术及应用. 北京:机械工业出版社,2015.[2] 王勇. 机器人控制理论与应用. 上海:上海科学技术出版社,2019.[3] 李明,陈华. 工业机器人技术与应用. 北京:中国机械出版社,2018.通过以上对三自由度机器人设计与控制的研究和分析,我们可以更好地把握机器人技术的发展趋势,为相关领域的研究和实践提供更有价值的参考和借鉴。
机器人专业本科生毕业设计题目
对于机器人专业的本科生,毕业设计题目可以涵盖多个领域,以下是一些可能的题目供您参考:
1. 自主导航机器人的设计与实现:该题目要求学生设计和实现一个能够自主导航的机器人,包括传感器融合、路径规划、运动控制等方面的内容。
2. 机器人的情感识别与交互:该题目要求学生研究如何让机器人识别和响应人类的情感,并实现情感交互的功能。
3. 基于机器学习的机器人控制策略:该题目要求学生利用机器学习算法来优化和控制机器人的运动,例如使用强化学习算法让机器人学习如何抓取物体。
4. 人机协作机器人的设计与实现:该题目要求学生设计和实现一个人机协作的机器人,能够与人共同完成任务,例如装配、搬运等。
5. 机器人感知与感知融合:该题目要求学生研究如何利用多种传感器来获取环境信息,并进行数据融合和处理,以实现更准确的感知。
6. 机器人的自适应控制:该题目要求学生设计和实现一个能够自适应调整参数的机器人控制系统,以适应不同的任务和环境。
7. 基于深度学习的机器人视觉识别:该题目要求学生利用深度学习算法来训练机器人的视觉识别系统,以实现对物体的分类、检测和跟踪等功能。
8. 机器人的智能语音交互:该题目要求学生设计和实现一个能够与人类进行语音交互的机器人系统,包括语音识别、语音合成、自然语言处理等方面的内容。
以上题目仅供参考,具体的题目还需要根据学校和导师的要求以及学生的兴趣和能力来确定。
机器人毕业设计机器人设计逻辑是人工智能领域的前沿研究方向之一,其应用广泛涉及工业自动化、医疗护理、家庭服务、教育培训等领域。
本文将以机器人在家庭服务中的应用为例,介绍一个基于人工智能的毕业设计。
为了提高家庭生活质量,我们设计了一款智能家居助手。
这个机器人的功能主要包括家庭安全监控、家电控制、语音助手和娱乐功能。
首先,家庭安全监控是该机器人的重要功能之一。
机器人配备了高清摄像头,可以实时监控家中的安全状况。
当机器人发现异常情况时,如门窗被撬开、烟雾报警器响起等,它会立即发出警报并向主人发送手机通知,同时可以通过录像或拍照的方式保存证据。
其次,该机器人还可以与家中的电器设备进行智能连接,实现家电控制的功能。
通过语音指令或手机 App 控制,机器人可以远程控制空调、电视、灯光等设备的开关和调节,让主人可以方便地远程操作。
第三,机器人还搭载了智能语音助手,可以实现人机对话交互。
主人可以通过语音指令询问天气、新闻或者获取最新的交通信息。
机器人可以通过自然语言处理技术,理解主人的意图并做出相应的回答,帮助主人解决生活中的疑问和问题。
最后,机器人还具备娱乐功能。
它可以播放音乐、唱歌、讲故事等,为家庭营造愉快的氛围。
同时,机器人还可以学习主人的个人喜好,为主人推荐电影、音乐或书籍,提供个性化的娱乐体验。
为了实现以上功能,我们将采用深度学习算法、自然语言处理技术和图像识别技术等人工智能技术。
机器人将通过深度学习不断地学习和优化自己的能力,提高对语音和图像的识别准确性和对话交互效果。
总之,这款机器人作为一个智能家居助手,将提供给家庭多种功能和服务,帮助人们解决日常生活中的问题,提高家庭的安全性和便捷性。
通过这个毕业设计,我们将探索人工智能在家庭服务领域的应用,为未来机器人技术的发展提供参考和启示。
三自由度机器人设计毕业设计
当涉及到设计一台三自由度机器人的毕业设计,需要考虑多个方面,包括机械结构、传感器、控制系统以及实际应用。
下面是一份可能的毕业设计大纲,供您参考。
一、引言
- 简要介绍三自由度机器人的概念及其在工业及其他领域的应用
- 阐明设计该机器人的目的和意义
二、文献综述
- 回顾目前关于三自由度机器人设计和控制方面的研究成果
- 分析该领域的发展趋势和存在的问题
三、机械结构设计
- 描述机器人的整体结构,包括关节类型、链条结构和末端执行器
- 详细介绍每个关节的设计考量,例如扭矩、速度和位置精度等
- 分析机器人的运动学和动力学特性
四、传感器系统设计
- 确定必要的传感器类型,如位置传感器、力传感器等
- 说明传感器的布局和工作原理
- 讨论传感器的精度和灵敏度对机器人性能的影响
五、控制系统设计
- 选择适当的控制方法,如PID控制、模糊控制或神经网络控制
- 根据机械结构和传感器系统的要求,设计和调试控制算法
- 确定控制系统的实时性和稳定性
六、实验验证与分析
- 搭建实验平台,验证设计的机械结构和控制系统性能
- 分析实验结果,包括机器人的定位精度、动态响应等性能指标
- 与已有研究成果进行比较,验证设计的合理性和优越性
七、结论与展望
- 总结整个设计过程和实验结果,总结优点和不足
- 展望未来,提出设计的改进方向及可能的应用领域
八、参考文献
- 列出引用的相关文献,包括设计手册、研究论文和相关标准
以上大纲仅供参考,设计时需根据具体情况进行调整和完善。
希望对您的毕业设计有所帮助!。
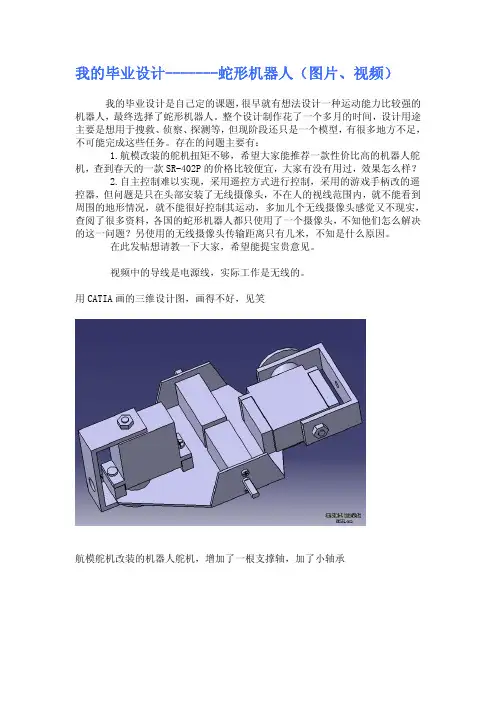
我的毕业设计-------蛇形机器人(图片、视频)
我的毕业设计是自己定的课题,很早就有想法设计一种运动能力比较强的机器人,最终选择了蛇形机器人。
整个设计制作花了一个多月的时间,设计用途主要是想用于搜救、侦察、探测等,但现阶段还只是一个模型,有很多地方不足,不可能完成这些任务。
存在的问题主要有:
1.航模改装的舵机扭矩不够,希望大家能推荐一款性价比高的机器人舵机,查到春天的一款SR-402P的价格比较便宜,大家有没有用过,效果怎么样?
2.自主控制难以实现,采用遥控方式进行控制,采用的游戏手柄改的遥控器,但问题是只在头部安装了无线摄像头,不在人的视线范围内,就不能看到周围的地形情况,就不能很好控制其运动,多加几个无线摄像头感觉又不现实,查阅了很多资料,各国的蛇形机器人都只使用了一个摄像头,不知他们怎么解决的这一问题?另使用的无线摄像头传输距离只有几米,不知是什么原因。
在此发帖想请教一下大家,希望能提宝贵意见。
视频中的导线是电源线,实际工作是无线的。
用CATIA画的三维设计图,画得不好,见笑
航模舵机改装的机器人舵机,增加了一根支撑轴,加了小轴承
三自由度关节
遥控用的无线数据收发模块
游戏手柄改装的遥控器,没有用里面的电路,自己用单片机做的
背面的平衡充接口
要两个人配合遥控的
16路舵机控制板,拆了一些元件减轻重量,改了部分电路
直流电机控制芯片L298N
5V电源转换电路,LM2596-5.0,电流3A
控制部分整合在一起
无线摄像头,距离不够远
用旧电容改成外壳的LED灯。
摘要随着红外物理与技术的不断发展, 红外探测技术已广泛地应用于军事、煤矿的安全生产等各个领域。
把目标或目标区域的红外辐射聚焦在探测器上红外接收光学系统的基本作用, 通常情况下其结构类似于普通的接收光学系统, 但由于工作波段为红外波段, 其光学材料和镀膜必须和它的工作波长相匹配。
针对题目的要求,我们设计了一款简易的红外避障小车。
电路设计主要有以下四个模块:传感器模块(红外发射和接收器),控制模块(AT89S52),执行模块(伺服电机),电源模块。
传感器模块主要通过对左、右红外传感器的信号分别进行采集,传送给控制模块。
控制模块对采集来的信号进行处理,做出比较后把控制信号传送给执行模块。
配合正确的软件设计,小车能够在设计的赛道中准确快速地完成行走任务。
关键词:红外;避障;传感器AbstractAll bodies has its own infrared radiation characteristics. For studying the various objects of infrared radiation, people use ideal ─absolute blackbody radiation body (hereinafter referred to as in bold) the benchmark. Can absorb all the incident radiation and not the reflection of the object is called in bold. Good absorber must have also been good radiation body, so the blackbody radiation efficiency is highest, the radiation rate than a 1. Any real objects of radiation emission quantity and the same temperature blackbody emission of quantity of launch than, called the object than radiation rate, its value is always less than 1. The object than radiation rate, and the material object types, characteristics, temperature, surface other factors, such as the wavelength.According to the topic request, we design a simple infrared obstacle avoidance of the car. The circuit design basically has the following four modules: sensor module (infrared transmitter and receiver), control module (AT89S52 devices), executive module (servo motor), power supply module. Sensor module mainly through to the left and right of the infrared sensor signal,respectively the collection, transfer to the control module. Control module to the acquisition of signal processing, make more the control after signals to execute module. The software design includes basic car to walk, walk, the combination of infrared obstacle avoidance program design, such as walking strategy improvement, through to the infrared signal processing to achieve the best car walk path.Cooperate with the right software design, the car can in the design of the track accurately and rapidly finish walking task.Keywords: infrared; Obstacle avoidance; sensor目录第一章绪论 (1)1.1红外线研究背景 (1)第二章红外避障机器人的设计方案 (3)2.1主要设计任务 (3)2.2任务分析与方案设计 (3)2.2.1 任务分析 (3)2.2.2 方案设计 (3)第三章硬件电路设计 (5)3.1红外传感器电路设计 (5)3.1.1红外发射二极管的选择 (5)3.1.2红外接收器的选择 (7)3.2控制电路设计 (10)3.3人机接口单元 (11)3.3.1 LCD1602显示 (11)3.3.2串口电路设计 (12)3.4执行电路设计 (13)3.4.1 伺服电机 (13)3.4.2 伺服电机的信号控制 (14)3.5电源电路设计 (14)3.6赛道设计 (15)第四章软件设计 (16)4.1机器人基本行走命令 (16)4.1.1基本巡航动作 (16)4.1.2匀加速/减速运动 (17)4.2红外探测 (19)4.2.1测试红外发射探测器 (19)4.2.2红外发射程序 (20)4.3关于行走赛道的硬件调试与改进 (22)第五章结束语 (23)5.1结论和展望 (23)致谢 (24)第一章绪论1.1 红外线研究背景在科学探索和紧急抢险中经常会遇到对与一些危险或人类不能直接到达的地域的探测,这些就需要用机器人来完成。
遥操作机器人理论本科毕业设计本文旨在介绍遥操作机器人的原理及其应用,对于机器人技术与自动化控制学科的本科生毕业设计提供一定的参考。
一、遥操作机器人概述机器人技术的发展一直是工业自动化领域的主流趋势。
随着技术的发展,遥操作机器人已经成为了一种极具价值和广泛应用的机器人技术,其能够在危险环境和人不能到达的场所完成工作。
遥操作机器人通过网络将遥控命令传输到机器人控制系统,再由机器人执行命令。
这种技术应用于现场操作、远程救援和环境监测等诸多领域。
二、遥操作机器人的技术原理1.机器人的机械结构机器人的机械结构是指机器人由连杆、接头、驱动器等部件构成的机械结构。
机械结构设计可以影响机器人的功能、精度和能力。
遥操作机器人的机械结构设计需要考虑的问题包括:机器人的尺寸、承载能力、运动自由度和工作空间等。
2.机器人的控制系统机器人的控制系统由三部分构成:感知系统、控制器和执行机构。
感知系统主要由传感器和摄像机等组成,用于实时获取外部环境信息;控制器主要由控制算法、人机界面和通信设备等组成,用于接收、处理、存储和传输遥控命令;执行机构主要由电机、执行器等组成,用于执行机器人的动作。
3.遥控系统遥控系统分为两种,一种是基于硬件平台的遥控器,另一种是基于软件平台的遥控系统。
通常情况下,在远程遥控过程中,遥控器会向底层设备发送命令,然后底层设备根据命令执行相应的动作。
在遥控系统的设计上需要考虑通信协议和安全性等问题。
三、遥操作机器人的应用领域1.危险环境遥操作机器人可以在剧毒化学品仓库、核电站、危险化工厂等环境中完成工作,减少人员伤亡和经济损失。
在危险环境中,遥操作机器人可以完成的任务包括货物装卸、基础维护、清洁和故障诊断等。
2.海洋勘探遥操作机器人可以在深海中进行勘测、观察和采样等工作,获取深海生物、海底矿产和海底景观等丰富信息。
遥操作机器人在海洋勘探中的应用也包括海底管道维护和潜艇救援等。
3.军事领域遥操作机器人可以在军队使用中完成情报收集、矿地侦查、地域勘探和卫星观测等任务。
目录绪论 (1)1 设计思路和总体方案 (2)1.1 寻机机器人的功能 (2)1.2 机器人的总体设计方案 (2)2 硬件电路的设计 (7)2.1 ATmega128最小系统模块的设计 (7)2.2 主板模块的设计 (8)2.3 寻迹模块的设计 (8)2.4 蔽障模块的设计 (10)2.5 电机驱动模块 (11)2.6 底盘模块 (11)3 软件程序的设计 (13)3.1 ATmega128单片机初始化函数 (14)3.2 定时器初始化函数 (14)3.3 PWM初始化函数 (18)3.4 数据采集函数 (20)3.5 主函数 (23)3.6 蔽障函数 (24)结论 (26)致谢 (27)参考文献 (28)附录 (29)绪论机器人技术是一门综合了传感与检测、运动控制、图形图像处理等技术的新型学科,它融合了机械、电子、传感器、计算机硬件、软件、人工智能等许多学科的知识,涉及到当前许多前沿领域的技术。
随着电子技术的飞速发展,智能机器人在越来越多的领域发挥着人类无法代替的作用。
机器人是一种自动化的机器,所不同的是这种机器具备一些与人或生物相似的智能能力,如感知能力、规划能力、动作能力和协同能力,是一种具有高度灵活性的自动化机器”。
在研究和开发未知及不确定环境下作业的机器人的过程中,人们逐步认识到机器人技术的本质是感知、决策、行动和交互技术的结合。
随着人们对机器人技术智能化本质认识的加深,机器人技术开始源源不断地向人类活动的各个领域渗透。
结合这些领域的应用特点,人们发展了各式各样的具有感知、决策、行动和交互能力的特种机器人和各种智能机器,如移动机器人、微机器人、水下机器人、医疗机器人、军用机器人、空中空间机器人、娱乐机器人等。
机器人以其具有灵活性、提高生产率、改进产品质量、改善劳动条件等优点而得到广泛应用。
但是,目前绝大多数机器人的灵活性,只是就其能够"反复编程"而言,工作环境相对来说是固定的,所以一般人们称之为操作手(Manipulator)。
基础工程设计说明书题目:寻光机器人摘要通过课设,加深对《电路分析基础》、《模拟电子技术》、《数字电子技术》等课程知识的理解,进一步训练和提高工程实际应用能力,能够综合运用基础课程所学的知识,设计并制作出实际应用电路或系统用555定时器设计电路, 555定时器的2、6管脚连接到一起,构成一个施密特触发器。
左右两边的光强差使两个光敏电阻的阻值发生变化,对电源分压,A点的电压作为施密特触发器的触发信号,使3管脚的输出信号产生翻转,驱动两个电机本次制作,让我把课堂上所学的知识运用到实际应用中,从一个新的角度来思考所学知识,体会到考试和动手操作是完全不同的,只要能够把所学的知识运用到实际中,才算真正理解,这些知识才算真正属于自己的。
在查找资料的过程中,了解到555定时器的广泛应用,不仅可以用来制作定时器,报警器,还可以制作控制电路,比如:水位控制器,智能温室系统等等。
所以,在以后的电子制作中,要拓展思路,不要只局限于单片机。
关键词:寻光机器人;555定时器;施密特触发器;目录引言 (3)1. 设计目的 (3)1.1 机器人的定义 (3)1.2 设计目的 (3)2. 设计要求 (4)2.1 功能要求 (4)2.2 器件要求 (4)3. 设计方案 (4)3.1 设计原理 (4)3.1.1 光敏电阻的特性 (4)3.1.2 电机的特性 (4)3.1.3555 定时器的功能 (4)3.2 题目分析 (5)3.3 方案一 (6)3.3.1 工作原理 (7)3.3.2 调试 (7)3.4 方案二 (7)3.4.1 工作原理 (9)4. 方案对比 (9)5. 结论 (9)谢辞 (10)参考文献 .................................................................................................. 错误!未定义书签。
附录 (12)PCB图 (12)元器件清单 (12)引言《汤问篇》记载说:“周穆王西巡狩,越昆仑,【不】至山。

摘要遥操作机器人理论本科毕业设计摘要随着探索领域的不断拓展,人类对机器人的需求越来越大。
当需要在一些人类难以到达或者危险的环境中完成复杂任务时,普通机器人往往难以胜任,这时遥操作机器人就应运而生。
遥操作机器人是机器人学与通信技术、控制理论等融合的产物。
它将人类的指导和机器自身的智能相结合,有效拓展了人类的活动空间,延伸了人类的能力,有广泛的应用前景。
本文主要研究遥操作机器人的时延控制问题。
首先,简要介绍了遥操作机器人的发展和现状,介绍了二端口网络理论,并为遥操作机器人建立了二端口网络模型。
然后,基于遥操作机器人的二端口网络模型,分析了时延对遥操作机器人控制效果的不利影响,以及产生这些不利影响的原因。
接着,运用无源控制理论中的波变量方法,设计遥操作机器人系统的控制算法。
最后,运用Matlab软件对控制算法进行仿真模拟。
关键词:机器人遥操作二端口无源控制ABSTRACTABSTRACTWith the exploration of the area continues to expand, the human demand on the robot is more and more big. When the need in some human inaccessible or dangerous environment to perform complex tasks, often difficult to do ordinary robot, teleoperation will emerge as the times require. Teleoperation is a fusion of robotics, communication technology and control theory. Teleoperation which combines human supervisor and machine intelligence effectively expands the space of human activity and extends human capability, so it has extensive application prospects.This paper mainly studies the control of time delay teleoperation. Firstly, this paper briefly describes the development status of the teleoperation and two-port network theory and builds a two-port network model for teleoperation. Secondly, based on the two-port network model of teleoperation, an analysis which is related to the adverse effect of the time delay in teleoperation control and the causes of these adverse effects is made. What's more, using wave variable method of the passive control theory, control algorithm off teleoperation is designed. Finally, Matlab is used to simulate the control algorithm.Keywords: robotics teleoperation two-port network passive control目录第一章绪论 (1)1.1 遥操作机器人的意义 (1)1.2 遥操作机器人的发展 (2)1.3 遥操作机器人的系统结构模型 (3)1.3.1 NASREM系统结构模型 (4)1.3.2 基于Agent的系统结构模型 (5)1.3.3 混杂系统结构模型 (5)1.3.4 采样控制模型 (6)1.4 遥操作机器人的数学模型 (7)1.5 遥操作机器人的时延控制 (8)1.5.1 基于电路理论的无源控制方法 (8)1.5.2 基于现代控制理论的方法 (8)1.5.3 基于虚拟现实技术的控制方法 (9)1.5.4 基于事件的控制方法 (9)1.6 本文主要研究内容 (9)第二章遥操作机器人的动力学模型和数学模型 (11)2.1 二端口网络理论 (11)2.2 遥操作机器人的体系结构 (11)2.3 遥操作机器人系统等效成二端口网络 (13)2.4 本章小结 (15)第三章遥操作机器人的稳定性分析与设计 (16)3.1 无源性理论 (16)3.2 遥操作机器人的稳定性分析 (18)3.3 基于波变量的矫正方法 (19)3.4 阻抗匹配 (21)3.5 透明性问题 (22)3.5.1 透明性的定义 (22)3.5.2 时延对透明性的影响 (23)3.6 本章小结 (25)第四章遥操作机器人的总体控制设计 (26)4.1 遥操作机器人的控制器设计 (26)4.2 遥操作机器人的总体控制结构 (28)4.3 本章小结 (29)第五章系统仿真实验 (30)5.1 对波变量方法的验证 (30)5.2 更加真实的遥操作机器人仿真模型 (31)5.3 消除了波反射的遥操作机器人仿真模型 (33)总结 (36)参考文献 (37)致谢.................................. 错误!未定义书签。
工业机器人专业毕业设计题目大全1. 工业机器人路径规划优化设计问题描述工业机器人在执行任务时需要根据任务要求规划最优路径,以提高生产效率。
本设计要求针对特定生产场景,设计一种路径规划优化算法,使工业机器人在执行任务时能够选择最短路径,避免碰撞,并尽可能减少运动时间。
设计要求•分析特定生产场景的要求和条件;•研究和实现路径规划优化算法;•设计算法测试和性能评估方法。
2. 工业机器人自动抓取系统设计问题描述工业机器人在生产过程中需要能够自动抓取不同形状、尺寸和重量的物品,并能够适应不同生产线上的工作环境。
本设计要求设计一种工业机器人自动抓取系统,使机器人能够根据物品的特征自动调整抓取策略,并能够保证抓取的准确性和稳定性。
设计要求•分析不同物品的特征,包括形状、尺寸和重量等;•设计一种智能的抓取系统,能够根据物品的特征自动调整抓取策略;•设计算法测试和性能评估方法。
3. 工业机器人视觉导航系统设计问题描述工业机器人在执行任务时需要具备视觉导航能力,以实现自主导航和避障功能。
本设计要求设计一种工业机器人视觉导航系统,使机器人能够通过摄像头获取环境图像,并能够识别和跟踪目标物体,同时能够实时更新环境地图和规划最优路径。
设计要求•设计一种视觉导航算法,能够实时获取环境图像,并识别和跟踪目标物体;•结合环境地图,设计最优路径规划算法;•设计算法测试和性能评估方法。
4. 工业机器人协作控制系统设计问题描述工业机器人在生产过程中有时需要与其他机器人或工人进行协作工作,以提高生产效率。
本设计要求设计一种工业机器人协作控制系统,实现多机器人或机器人与工人之间的协作工作,同时保证工作的安全性和协调性。
设计要求•分析工业机器人协作工作的需求和条件;•设计一种协作控制系统,实现多机器人或机器人与工人之间的协作工作;•设计算法测试和性能评估方法。
5. 工业机器人故障诊断系统设计问题描述工业机器人在长时间运行过程中可能会出现故障,影响生产效率和机器人的安全性。
《工业机器人技术毕业设计探究》工业机器人作为现代制造业中不可或缺的重要力量,其技术的发展和应用对于提高生产效率、提升产品质量、改善工作环境等方面都具有深远的意义。
在工业机器人技术飞速发展的背景下,完成一篇高质量的毕业设计无疑是对所学知识的综合运用和深入探索,也是迈向工业机器人领域专业人才的重要一步。
工业机器人技术涉及多个学科领域的知识融合,包括机械工程、自动化控制、电子技术、计算机科学等。
在毕业设计中,学生需要深入研究工业机器人的结构设计、运动控制、编程与调试、系统集成等关键技术。
工业机器人的结构设计是其基础。
合理的结构设计能够确保机器人具备良好的稳定性、精度和承载能力。
学生在毕业设计中需要通过对机器人的运动学和动力学分析,设计出满足特定工作任务要求的机器人本体结构。
这包括关节的布局、杆件的尺寸选择、传动机构的设计等方面。
还需要考虑机器人的轻量化设计,以提高其运动灵活性和能效。
通过使用先进的三维建模软件进行虚拟设计和仿真分析,可以验证结构设计的合理性,减少实际制作过程中的问题和成本。
运动控制是工业机器人技术的核心之一。
机器人需要精确地控制其各个关节的运动,以实现准确的轨迹跟踪和定位。
毕业设计中,学生需要研究各种运动控制算法,如 PID 控制、轨迹规划算法等。
PID 控制算法能够实现对机器人位置、速度和加速度的稳定控制,而轨迹规划算法则用于生成机器人在工作空间内的最优运动路径,提高生产效率和运动平滑性。
还需要考虑传感器技术的应用,如位置传感器、力传感器等,以实现机器人的实时反馈和精确控制。
通过编写控制程序和进行实验验证,学生可以不断优化运动控制算法,提高机器人的运动性能和可靠性。
编程与调试是工业机器人系统实现自动化操作的关键环节。
学生在毕业设计中需要掌握工业机器人编程语言,如 ROBOTC、ABB 机器人编程语言等。
通过编程实现机器人的各种动作指令、逻辑控制和与外部设备的通信。
在编程过程中,要注重代码的可读性、可维护性和可扩展性,以便后续的维护和升级。
煤矿安全生产探测机器人的设计煤矿安全生产机器人可以代替人工在进入矿井作业之前探测井下是否有安全隐患,并可以通过无线的方式向地面上位机传输当前的环境参数,以预防发生安全事故。
在井下发生事故之后,救助人员不可能在短时间内救出被困人员,而且此时无法保证井下是否会再次发生事故,这时,可利用井下不同位置布置的安全生产机器人向上位机通过wifi方式传回井下的视频和图片以及当前的环境参数,这样一方面可以快速的找到被困人员,另一方面也提高了救援过程的安全因素。
还可以以探测机器人为媒介实现井下与地面的实时沟通,以避免重大事故的发生,通过上位机的控制,也可以给下位机下达命令,执行维修、救援等功能。
本文是对煤矿安全生产机器人领域的一次探索。
设计综合可实用性、扩展性、不同环境适应性等因素,有很好的可持续开发性。
标签:煤矿安全生产;机器人;设计1 总体结构设计本设计要实现的基本功能有:上位机给下位机发送命令,控制机器人的动作,下位机通过wifi模块将视频传输到上位机显示,以达到监控的效果。
如果时间充裕,可以增加温度采集,空气成分采集,避障,循迹等扩展功能。
根据要实现的这些功能,制定出以下的总体设计方案:机器人需要向上位机传输视频,为了能够监控到尽可能大的范围,所以应该为摄像头设计一个可以两个自由度旋转的云台,这样就可以通过上位机监控到摄像头前方各个方向的环境。
云台可由两个9g小舵机和一个摄像头云台改装而成。
为了能够更好的适应井下复杂的环境,机器人采用履带方式。
摄像头云台、电源、主控板、wifi模块、蓝牙模块均搭载到一块雅克力材料板上面。
2 下位机设计根据机器人的功能,下位机电路需要有单片机最小系统、稳压电路、电机驱动模块、摄像头模块、WIFI模块、蓝牙模块、UART模块、ISP下载接口、JTAG 仿真接口。
还需要在PCB板上设计好电机接口、舵机接口、传感器接口、蓝牙模块接口、wifi模块接口以及电源接入口、电源扩展口、单片机I/O扩展接口等。
摘要煤矿灾害尤其是瓦斯煤尘爆炸事故发生后,矿井环境十分复杂,井下因灾受伤人员面临极其危险的状况,需尽快地转移与救护;而救援工作异常困难和危险,往往在救援工作中造成救护人员的伤亡。
研发代替或部分代替救护人员及时、快速深入矿井灾区进行环境探测和搜救工作的救灾机器人具有极其重要的意义。
本论文研究工作的目的是设计结构新颖、具有独创性的可携带、抗一定冲击的履带移动机器人,以能够适应在恶劣环境和复杂路况下工作。
通过在移动系统上加载不同的模块,能够实现搜救机器人不同的使用功能,本研究意义在于为后续设计的搜救机器人提供一个基础的动力平台,以便于能够开发出更多使用功能的搜救机器人。
本研究所设计的搜救机器人移动方案是履带式驱动结构。
该方案采用模块化设计,便于拆卸维修,可以分段自适应复杂路面,并可主动控制两侧翼板模块的转动来调节机器人姿态变化,辅助爬坡、越障和跨沟;机器人经过合理的结构布局和设计后具有良好的环境适应能力、机动能力并能抵抗一定高度的掉落冲击。
所设计的机器人移动机构主要由四部分组成:主动轮减速驱动机构、翼板转动机构、自适应路面执行机构、履带及履带轮运动机构,本论文对上述各部分方案分别进行论证、结构设计计算、3D建模,并设计了搜救机器人虚拟样机。
关键字:搜救机器人;复合移动机构;模块化设计;AbstractCoal mine disasters,especially gas and coal dust explosion, mine environment is very complex and wounded tolls mine face extremely dangerous conditions,be transferred as soon as possible and rescue.and rescue work extremely difficult and dangerous, often resulting in the rescue work in the ambulance casualties.R & D to replace or partially replace the ambulance personnel in a timely manner, quick in-depth environmental exploration and mine disaster relief robot search and rescue work is extremely important The purpose of this thesis is to design novel structure, its unique portable,shock intelligently tracked mobile robot, in order to be able to adapt to the harsh environment and the complicated road to work.Mobile systems loaded by different modules, search and rescue robots can be achieved using different functions, this study is important because other people's search and rescue robot designed to provide a basis for the dynamic platform to facilitate greater use of features can developsearch and rescue robots.This resoarch is moving search and rescue robot crawler.The program is modular in design, easy disassembly maintenance, can be complex adaptive sub-surface, active control can turn on both sides of flange module to adjust the robot pose changes, supporting climbing,obstacle and cross-channel.The design of the robot moving mechanism mainly consists of four components. Active wheel reducer drive mechanism, flange rotation institutions, adaptive road implementing agencies, sports organizations track and track wheels, part of the paper on the above programs were carried out feasibility studies, structural designcalculation, 3D modeling , and design a rescue robot prototype.Key words: search and rescue robots; composite mobile body; modular design目录前言 (1)1 绪论 (3)1.1 课题研究背景及意义 (3)1.1.1 课题研究背景 (3)1.1.2 课题研究意义 (3)1.2 国内外的研究概况 (5)1.2.1 国外研究现状 (5)2.2国内研究现状 (10)1.2.3 发展趋势 (11)2 搜救机器人的总体结构方案设计 (12)2.1 井下复杂环境对救灾机器人的要求 (12)2.2 典型移动机构方案论证分析 (13)2.2.1 轮式移动机构特点 (13)2.2.2 腿式移动机构特点 (14)2.2.3 履带式移动机构特点 (15)2.2.4 履、腿式移动机构特点 (16)2.2.5 轮、履、腿式移动机构性能比较 (17)2.3 本研究采用的行走机构 (17)2.4 救灾机器人性能指标与设计 (18)2.5 本章小结 (19)3矿用搜救机器人运动参数设计计算 (20)3.1机器人越障分析 (20)3.1.1机器人跨越台阶 (20)3.1.2跨越沟槽 (20)3.2斜坡运动分析 (20)3.3 本章小结 (20)4机器人移动平台机械设计 (21)4.1驱动电机的选则 (21)4.1.1基于平地的最大速度的电机功率计算 (21)4.1.2爬坡最大坡度的驱动电机功率计算 (22)4.2 本章小结 (23)5 驱动轮减速器设计 (24)5.1减速器方案分析 (24)5.1.1减速器应满足的要求 (24)5.1.2 减速器方案分析 (25)5.2 减速器的设计计算 (26)5.2.1减速器的传动方案分析 (26)5.2.2配齿计算 (26)5.2.3初步计算齿轮的主要参数 (27)5.2.4装配条件的计算 (32)5.2.5高速级齿轮强度的验算 (33)5.2.6 轴的设计及校核 (41)5.3 本章小结 (44)6移动机构履带及翼板部分设计 (44)6.1履带的选择 (44)6.1.1 确定带的型号和节距 (45)6.1.2确定主从动轮直径 (46)6.1.3确定节线长度和带宽 (46)6.2 翼板部分设计 (48)6.3 本章小结 (49)7机器人摇臂的设计 (49)7.1 摇臂作用概述 (49)7.2摇臂传动减速器设计 (51)7.3本章小结 (52)8 总结与展望 (53)致谢 (55)参考文献 (56)前言我国的煤炭资源十分丰富,是世界上最大的煤炭生产国和消费国。
机器人工程专业毕业设计开题报告一、选题背景随着人工智能和自动化技术的不断发展,机器人在各个领域的应用越来越广泛。
机器人工程作为一个新兴的交叉学科,涉及机械、电子、计算机等多个领域的知识,具有广阔的发展前景。
本次毕业设计选题旨在探讨机器人在特定领域的应用,结合实际问题进行深入研究和解决方案设计。
二、选题意义通过开展本次毕业设计,可以深入了解机器人工程领域的最新技术和发展趋势,提升对机器人系统设计、控制算法等方面的理解和应用能力。
同时,通过实际项目的设计与实施,培养学生的创新思维和解决问题的能力,为将来从事相关领域的工作打下坚实基础。
三、选题内容本次毕业设计选题为“基于深度学习的智能机器人视觉导航系统设计与实现”。
该选题旨在利用深度学习技术,设计一套智能机器人视觉导航系统,实现对环境中目标物体的识别和定位,并通过路径规划算法实现机器人在复杂环境中的自主导航。
四、拟解决的关键问题如何利用深度学习技术提高机器人视觉识别准确率?如何设计有效的路径规划算法,实现机器人在复杂环境中的自主导航?如何将视觉识别和路径规划算法有效集成,构建完整的智能导航系统?五、预期成果完成基于深度学习的目标物体识别模型,并在实际场景中进行测试验证。
实现智能机器人在模拟环境中的自主导航功能,并进行性能评估。
撰写毕业论文,总结设计过程、实验结果及存在的问题,并提出未来改进方向。
通过本次毕业设计,将全面提升对机器人工程领域相关知识和技能的掌握水平,为未来从事相关科研或工程项目奠定坚实基础。
希望借助此次设计,能够为智能机器人领域的发展做出一定贡献。
以上为本次毕业设计开题报告内容,希望得到指导老师的认可与支持。
感谢各位专家学者的关注与指导!。
摘要 本设计采用模块化设计,以便根据要求选择和定制配置,并在需要的时候方便更换和添加其他模块,而且给出了两种移动方式的设计方案,即轮式的设计和履带式移动方式,两者都有各自的特点。轮式探测机器人的机动性能比较好;履带式的机器人也具有良好的机动性,在越障、跨沟、攀爬方面具有明显优势,其最大优点是具有良好的越障性能、环境适应性能、防摔抗冲击性能并具备全地形通过能力。因此本次设计主要以履带式为主。除了设计探测机器人的总体结构外,还给出了移动控制方案。 机器人最重要的机构是运动底盘的设计,即使软件设计的再好,移动方式没有设计好,那么机器人也不会很好的执行任务。轮式,腿式,履带式的移动方式在设计过程中已经给出, 可以根据自己设计的要求进行选择。如果地形比较平缓,或是有沟壑的地形,可以选择履带的移动方式;如果是平缓没有沟壑的地形,就选用轮式的移动方式;如果地形成阶梯状,而且地形比较复杂,最好选用腿式的方法。 本设计可以采用两种控制系统,即通过上位机直接通过总线对机器人进行控制或是通过无线电台对机器人进行控制。 关键词: 探测机器人; 模块化设计; 履带移动方式; 机器人的控制系统; Abstract The design is modular in design so that in accordance with requirements of options and custom configuration, and when needed to facilitate the replacement and add other modules, and is given two mobile forms of design options, that is, tracked and wheeled mobile way of design , Both have their own characteristics, but mainly to crawler-based research and design, it has good mobility in the barrier, the inter-ditch, climbing has obvious advantages. The robot is the greatest advantage of the barrier has a good performance, adapt to environmental performance, Fangshuai impact resistance and have all-terrain capacity. The wheeled robot will detect mobility is better。In addition to detecting robot design the overall structure, but also gives a mobile control ways。 Robot is the most important bodies of the sports chassis design, even the best software design, mobile design means no good, then the robot will not be very good mission. Wheeled, legged, tracked the movement of way in the design process has been given, Can be designed in accordance with the requirements of their own choice if the relatively flat terrain, or a gully of the terrain, can choose to track the movement; If the gully is not flat terrain, on the choice of wheeled mobile way, if formed ladder, and More complex terrain, the best choice legged approach。 This design uses two types of control systems, through the PC directly through the bus to control the robot through the radio or to control the robot。 Keywords: Detecting robot; modular design;tracked mobile; robot's control system; 目 录 摘要 ――――――――――――――――――――――――——Ⅰ Abstract ―――――――――――――――――――――——Ⅱ
第一章 概述 ――――――――――――――――――――――――――1
1.1 机器人的发展史 ――――――――――――――――――――--1 1.2 机器人的现实应用范围 ――――――――――――――――――2 1.3 探测机器人的未来发展趋势 ―――――――――――――――—3 1.4 研究内容 ――――――――――――――――――――――――3 第二章 机械系统的设计 ――――――――――――――――――――4
2.1 计算机模块的设计 ――――――――――――――――――――4 2.2 传感器模块的设计 ――――――――――――――――――――5 2.3 电源及驱动模块的设计 ――――――――――――――――――5 2.4 底盘运动模块的设计 ―――――――――――――――――――-5 2.5 各模块的连接 ――――――――――――――――――――――-9 第三章 传感器系统的设计―――――――――――――――――――-11
3.1 传感器的作用及其分类 ――――――――――――――――――-11 3.2 视觉传感器 ―――――――――――――――――――――――-11 3.3 超声波传感器 ――――――――――――――――――――――-12 3.4 红外传感器 ―――――――――――――――――――――――-13 第四章 能源驱动的设计选择――――――――――――――――――-14 4.1 能源的供给 ―――――――――――――――――――――――-14 4.2 电机的选择 ―――――――――――――――――――――――-14 4.3 电机驱动的选择 ―――――――――――――――――――――-15 第五章 探测机器人的硬件系统―――――――――――――――――-17 5.1 传感器采集系统 ―――――――――――――――――――――-17 5.2 保护电路 ――――――――――――――――――――――――-18 5.3 红外传感器的接线 ――――――――――――――――――――-18 5.4 超声波传感器的接线 ―――――――――――――――――――-19 5.5 罗盘处理流程 ――――――――――――――――――――――-19 5.6 RS485-RS232转换电路 ――――――――――――――――――-20 第六章 探测机器人计算机硬件系统 ――――――――――――――-21 6.1 无线电台通讯系统 ――――――――――――――――――――-21 6.2 电子罗盘 ――――――――――――――――――――――――-21 第七章 探测机器人软件系统的开发 ――――――――――――――-21 7.1 移动控制系统的设计 ―――――――――――――――――――-23
7.2 演示控制程序 ――――――――――――――――――――――-23
结束语 ―――――――――――――――――――――――――――――-26
致谢 ――――――――――――――――――――――――――――――-27 参考文献 ―――――――――――――――――――――――――――-28 山东大学自学考试毕业设计(本科) 1 第一章概述 目前,在劳动强度大或危险作业的场所,已逐步使用机器人取代人的工作。出于重要的战略意义,资源领域已成为各科技强国相互竞争的一个焦点,出于安全性等因素的考虑,对探测机器人的研究设计也成为了开发资源的重要硬件之一,它的实现不仅可以从事特殊的作业,而且一般的生产、事务和家务,也可全部由探测机器人去处理。因此,探测机器人的研究具有重要的战略意义。 1.1机器人的发展史 随着人们对机器的研究,机器人也在进步,按其发展过程机器人可分为三代: 第一代是示教再现型机器人:"尤尼梅特"和"沃尔萨特兰"这两种最早的工业机器人是示教再现型机器人的典型代表。它由人操纵机械手做一遍应当完成的动作或通过控制器发出指令让机械手臂动作,在动作过程中机器人会自动将这一过程存入记忆装置。当机器人工作时,能再现人教给它的动作,并能自动重复的执行。这类机器人不具有外界信息的反馈能力,很难适应变化的环境。 第二代是有感觉的机器人:它们对外界环境有一定感知能力,并具有听觉、视觉、触觉等功能。机器人工作时,根据感觉器官(传感器)获得的信息,灵活调整自己的工作状态,保证在适应环境的情况下完成工作。如:有触觉的机械手可轻松自如地抓取鸡蛋,具有嗅觉的机器人能分辨出不同饮料和酒类。 第三代是具有智能的机器人:智能机器人是靠人工智能技术决策行动的机器人,它们根据感觉到的信息,进行独立思维、识别、推理,并作出判断和决策,不用人的参与就可以完成一些复杂的工作。日本研制的能演奏数首曲目?quot;瓦伯特"2号机器人,已达到5岁儿童的智能水平。目前,智能机器人已在许多方面具有人类的特点,随着机器人技术不断发展与完善,机器人的智能水平将越来越接近人类,本次设计的探测机器人就属于第三代。 1.2 机器人的现实应用范围 i1)行星探测移动机器人
行星探测移动机器人的研究对于发展行星科学、提高国防能力、提高国家的国际地位等方面均有重要意义,因为:①移动机器人是行星科学研究中着陆探测和取回样品到实验室分析的有力工具。②人类在太空中停留数月之久会严重丢失钙和磷,这似乎意味着人类不可能在重力为零的状态下飞行6一9个月或更长一点时间。但机器人不存在这个问题。因此,行星探测移动机器人的研究是对行星进行长期实地考察的需要。③大大节省探测成本。以月球探测为例,根据粗略的估计,一次有人驾驶的飞行所花费的钱要比无人驾驶飞行多50一100倍。因此,光就科学上的探索来说,用机器人执行无人驾驶飞行任务是合算的。④有利于提高国家国防自动化的水平和国际地位。因此,行星探测移动机器人的研究受到世界各国的高度重视。