内反馈串级调速电动机直流回路稳态特性分析
- 格式:pdf
- 大小:287.70 KB
- 文档页数:4


直流电机PI控制器稳态误差分析直流电机是一种常见的电动机类型,广泛应用于各个领域。
在控制直流电机运动过程中,PI控制器常用于控制其转速或位置。
在设计PI控制器时,稳态误差是一个重要的性能指标。
本文将对直流电机PI控制器稳态误差进行分析,并介绍如何通过调整PI控制器参数来减小稳态误差。
首先,我们需要了解什么是稳态误差。
稳态误差是指在控制系统达到稳定状态时,输出信号与期望信号之间的差异。
对于直流电机控制,稳态误差通常用来衡量电机的速度或位置达到设定值时的偏差。
1.积分动作的作用不足。
PI控制器通过积分动作来消除稳态误差,但如果积分时间过长或增益过小,积分动作可能无法完全消除误差。
2.系统本身的特性。
直流电机控制系统的稳态误差还受到电机动力学特性的影响,例如电机的阻尼特性和惯性特性等。
对于直流电机的速度控制,我们可以将系统的传递函数表示为:G(s)=K/(s(Ts+1))其中,K是系统的增益,T是系统的时延。
对于PI控制器,传递函数可以表示为:C(s)=Kp+Ki/s其中,Kp是比例增益,Ki是积分增益。
为了分析PI控制器的稳态误差,我们可以采用闭环传递函数的方式。
将直流电机的传递函数G(s)与PI控制器的传递函数C(s)相乘,得到闭环传递函数:T(s)=G(s)C(s)=(Kp+Ki/s)(K/(s(Ts+1)))通过计算T(s)的极点和零点,可以得到闭环系统的稳态误差特性。
对于速度控制系统而言,我们通常关注的是零频率处的稳态误差。
T(0)=(Kp+Ki/0)(K/(0(T0+1)))=Kp/K由上式可知,速度控制系统的稳态误差与比例增益Kp有关,而与积分增益Ki无关。
这意味着通过增大比例增益Kp,可以有效减小稳态误差。
但是,过大的比例增益Kp可能导致系统不稳定,因此在实际应用中需要进行适当的选择。
一种常用的方法是根据系统的响应特性进行调整。
当然,在实际控制过程中,我们还需要考虑到系统的动态特性。
如果系统的响应速度过慢,可能会导致误差积累较大。

EL-DS-Ⅲ型电气控制系统综合实验台V3.1北京精仪达盛科技有限公司2005年5月实验注意事项实验注意事项(一)“综合实验台”及其挂箱初次使用或较长时间未用时,实验前务必对“实验台”及其挂箱进行全面检查和单元环节调试。
(二)实验前,务必设置“工作模式选择”开关(直流调速、交流调速、电力电子、高级应用),并按下表正确选择主变压器二次侧相电压,认真检查各开关和旋钮的位置以及实验接线是否正确,经教师审核、检查无误后方可开始实验。
主变压器二次侧抽头输出电压及其适用范围(三)出现任何异常,务必立即切除实验台总电源(或按急停按钮)。
(四)为防止调速系统的振荡,在接入调节器时必须同时接入RC阻容箱,先设定为1:1的比例状态,实验中按需再行改变阻容值,直至满足要求。
(五)本实验台“过流”信号取自“三相电流检测(DD04)”单元。
因此,在所有交、直流实验电路中都已接入(DD04)单元,但应经常检查,确保过流保护的完好、可靠。
(六)实验过程中,注意监视主电路的过载电流,不超过系统的允许值,并尽可能缩短必要的过载和堵转状态的时间。
(七)无“电流闭环”又无“电流截止负反馈”的系统,务必采用“给定积分”输出,否则不可阶跃起动,应从0V缓慢起调。
(八)“闭环系统”主控开启前,务必确保负反馈接线正确、各个调节器性能良好、限幅值正确无误。
(九)实验前,先将负载给定调到“0”(若用发电机负载则将变阻器开路或置于阻值最大),实验中按需要,逐步增大负载,直至所要求的负载电流。
(十)“电流开环”的交流调速系统,给定应接积分输出(Un*2 )给出。
(十一)双踪示波器”测试双线波形,严防因示波器“双表笔”已共地而引起系统短路。
(十二)本“实验注意事项”,适用于采用本实验台的所有实验。
· 1 ·EL-DS-Ⅲ型电气控制综合实验系统·直流调速系统实验指南北京精仪达盛科技有限公司www.techshi ne.co mE-mai l:w elco me@techshi ne.co m实验注意事项任何改接线,首先断电源;一旦有异常,按急停开关。
第一章直流电机调速系统实验实验一单闭环不可逆直流调速系统实验一、实验目的(1)了解单闭环直流调速系统的原理、组成及各主要单元部件的原理。
(2)掌握晶闸管直流调速系统的一般调试过程。
(3)认识闭环反馈控制系统的基本特性。
二、实验所需挂件及附件三、实验线路及原理为了提高直流调速系统的动静态性能指标,通常采用闭环控制系统(包括单闭环系统和多闭环系统)。
对调速指标要求不高的场合,采用单闭环系统,而对调速指标较高的则采用多闭环系统。
按反馈的方式不同可分为转速反馈,电流反馈,电压反馈等。
在单闭环系统中,转速单闭环使用较多。
在本装置中,转速单闭环实验是将反映转速变化的电压信号作为反馈信号,经“转速变换”后接到“速度调节器”的输入端,与“给定”的电压相比较经放大后,得到移相控制电压U ct,用作控制整流桥的“触发电路”,触发脉冲经功放后加到晶闸管的门极和阴极之间,以改变“三相全控整流”的输出电压,这就构成了速度负反馈闭环系统。
电机的转速随给定电压变化,电机最高转速由速度调节器的输出限幅所决定,速度调节器采用P(比例)调节对阶跃输入有稳态误差,要想消除上述误差,则需将调节器换成PI(比例积分)调节。
这时当“给定”恒定时,闭环系统对速度变化起到了抑制作用,当电机负载或电源电压波动时,电机的转速能稳定在一定的范围内变化。
在电流单闭环中,将反映电流变化的电流互感器输出电压信号作为反馈信号加到“电流调节器”的输入端,与“给定”的电压相比较,经放大后,得到移相控制电压U ct,控制整流桥的“触发电路”,改变“三相全控整流”的电压输出,从而构成了电流负反馈闭环系统。
电机的最高转速也由电流调节器的输出限幅所决定。
同样,电流调节器若采用P(比例)调节,对阶跃输入有稳态误差,要消除该误差将调节器换成PI(比例积分)调节。
当“给定”恒定时,闭环系统对电枢电流变化起到了抑制作用,当电机负载或电源电压波动时,电机的电枢电流能稳定在一定的范围内变化。
摘要直流电动机具有良好的起动、制动性能,宜于在大范围内平滑调速,在许多需要调速或快速正反向的电力拖动领域中得到了广泛的应用。
从控制的角度来看,直流调速还是交流拖动系统的基础。
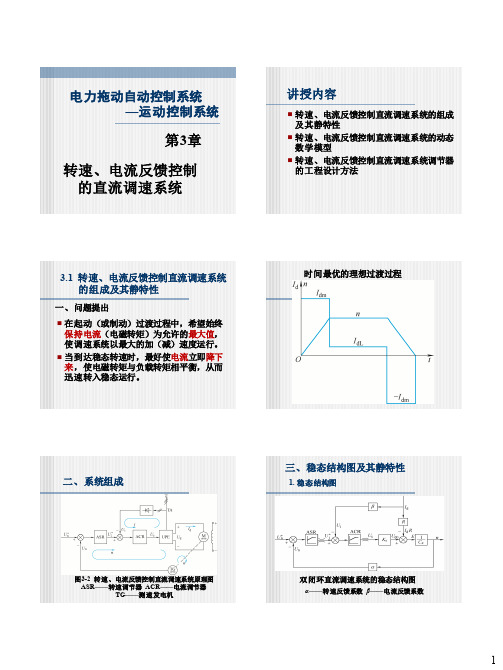
该系统中设置了电流检测环节、电流调节器以及转速检测环节、转速调节器,构成了电流环和转速环,前者通过电流元件的反馈作用稳定电流,后者通过转速检测元件的反馈作用保持转速稳定,最终消除转速偏差,从而使系统达到调节电流和转速的目的。
该系统起动时,转速外环饱和不起作用,电流内环起主要作用,调节起动电流保持最大值,使转速线性变化,迅速达到给定值;稳态运行时,转速负反馈外环起主要作用,使转速随转速给定电压的变化而变化,电流内环跟随转速外环调节电机的电枢电流以平衡负载电流。
并通过Simulink进行系统的数学建模和系统仿真,分析双闭环直流调速系统的特性。
自70年代以来,国外在电气传动领域内,大量地采用了“晶闸管直流电动机调速”技术(简称KZ—D调速系统),尽管当今功率半导体变流技术已有了突飞猛进的发展,但在工业生产中KZ—D系统的应用还是占有相当的比重。
在工程设计与理论学习过程中,会接触到大量关于调速控制系统的分析、综合与设计问题。
传统的研究方法主要有解析法,实验法与仿真实验,其中前两种方法在具有各自优点的同时也存在着不同的局限性。
双闭环(电流环、转速环)调速系统是一种当前应用广泛,经济,适用的电力传动系统。
它具有动态响应快、抗干扰能力强等优点。
我们知道反馈闭环控制系统具有良好的抗扰性能,它对于被反馈环的前向通道上的一切扰动作用都能有效的加以抑制。
采用转速负反馈和PI调节器的单闭环的调速系统可以再保证系统稳定的条件下实现转速无静差。
但如果对系统的动态性能要求较高,例如要求起制动、突加负载动态速降小等等,单闭环系统就难以满足要求。
这主要是因为在单闭环系统中不能完全按照需要来控制动态过程的电流或转矩。
在单闭环系统中,只有电流截止至负反馈环节是专门用来控制电流的。