4.4非线性校正算法教程
- 格式:ppt
- 大小:4.14 MB
- 文档页数:33
传感器非线性误差的修正摘 要:传感器在采集数据时存在一定的非线性误差。
要使系统的性能达到最佳,必须对传感器的非线性误差进行分析和处理。
本文讨论了传感器非线性误差的几种处理方法,并对各种方法作了比较。
关键词:非线性误差,硬件电路校正,查表法,插值法,最小二乘法,频域修正法一、 引言在工业过程控制中,由于传感器的非线性输出特性和同种传感器的输出存在一定的分散性,测量结果会产生一定的误差。
为此,我们需要对传感器的特性进行校正和补偿,以提高测量的精度,并且使传感器输出线性化和标准化。
对非线性误差的矫正和补偿可以采用硬件电路或者软件的方法来实现。
二、 采用电路进行非线性误差的矫正采用硬件电路对非线性误差进行矫正,优点是速度快;缺点是价格高,拟合程度不好。
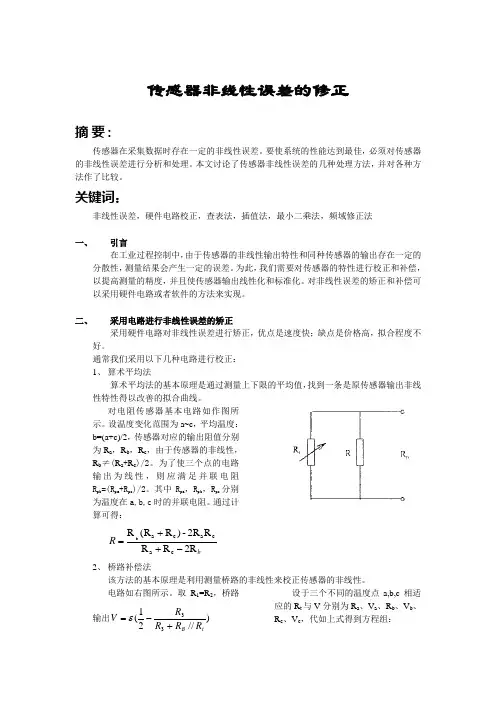
通常我们采用以下几种电路进行校正:1、 算术平均法算术平均法的基本原理是通过测量上下限的平均值,找到一条是原传感器输出非线性特性得以改善的拟合曲线。
对电阻传感器基本电路如作图所示。
设温度变化范围为a~c ,平均温度:b=(a+c)/2,传感器对应的输出阻值分别为R a ,R b ,R c ,由于传感器的非线性,R b ≠(R a +R c )/2。
为了使三个点的电路输出为线性,则应满足并联电阻R pb =(R pa +R pc )/2。
其中R pa ,R pb ,R pc 分别为温度在a,b,c 时的并联电阻。
通过计算可得: b R R 2R R R 2R -)R (R R c a ca c ab -++=2、 桥路补偿法该方法的基本原理是利用测量桥路的非线性来校正传感器的非线性。
电路如右图所示。
取R 1=R 2,桥路输出)//21(33tB R R R R V +-=ε 设于三个不同的温度点a,b,c 相适应的R t 与V 分别为R a 、V a 、R b 、V b 、R c 、V c ,代如上式得到方程组:)//21(33ab a R R R R V +-=ε )//21(33bb b R R R R V +-=ε )//21(33cb c R R R R V +-=ε解此方程组可得到满足要求的R3、R B 、ε。

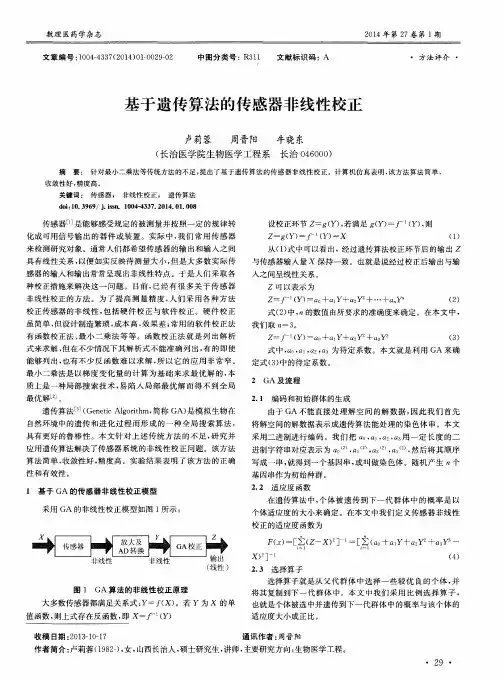
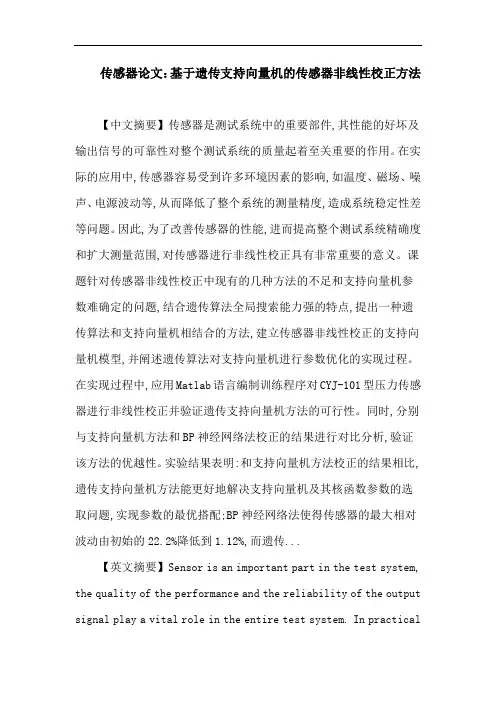
传感器论文:基于遗传支持向量机的传感器非线性校正方法【中文摘要】传感器是测试系统中的重要部件,其性能的好坏及输出信号的可靠性对整个测试系统的质量起着至关重要的作用。
在实际的应用中,传感器容易受到许多环境因素的影响,如温度、磁场、噪声、电源波动等,从而降低了整个系统的测量精度,造成系统稳定性差等问题。
因此,为了改善传感器的性能,进而提高整个测试系统精确度和扩大测量范围,对传感器进行非线性校正具有非常重要的意义。
课题针对传感器非线性校正中现有的几种方法的不足和支持向量机参数难确定的问题,结合遗传算法全局搜索能力强的特点,提出一种遗传算法和支持向量机相结合的方法,建立传感器非线性校正的支持向量机模型,并阐述遗传算法对支持向量机进行参数优化的实现过程。
在实现过程中,应用Matlab语言编制训练程序对CYJ-101型压力传感器进行非线性校正并验证遗传支持向量机方法的可行性。
同时,分别与支持向量机方法和BP神经网络法校正的结果进行对比分析,验证该方法的优越性。
实验结果表明:和支持向量机方法校正的结果相比,遗传支持向量机方法能更好地解决支持向量机及其核函数参数的选取问题,实现参数的最优搭配;BP神经网络法使得传感器的最大相对波动由初始的22.2%降低到1.12%,而遗传...【英文摘要】Sensor is an important part in the test system, the quality of the performance and the reliability of the output signal play a vital role in the entire test system. In practicalapplications, the sensors can be susceptible to many environmental factors, such as temperature, magnetic field, noise and power fluctuations, which reduce the accuracy and result in poor stability of the system. Therefore, the nonlinear correction of the sensors, which improves the performance of the sensors and the accuracy of the...【关键词】传感器非线性校正支持向量机遗传算法 Matlab 【英文关键词】Sensor Nonlinear Correction Support Vector Machine (SVM) Genetic Algorithm (GA) Matlab【索购全文】联系Q1:138113721 Q2:139938848【目录】基于遗传支持向量机的传感器非线性校正方法摘要8-9ABSTRACT9插图索引11-12附表索引12-13第1章绪论13-23 1.1 引言13 1.2 传感器简介13-15 1.2.1 传感器的基本结构13-14 1.2.2 传感器的基本特性14-15 1.3 传感器的应用领域15-16 1.4 国内外研究现状16-19 1.4.1 传感器的国内外研究现状16-17 1.4.2 传感器非线性校正的国内外研究现状17-19 1.5 传感器的发展趋势19-21 1.6 课题的研究意义及主要内容21-23 1.6.1 课题的研究意义21-22 1.6.2 课题研究的主要内容22-23第2章支持向量机理论及遗传算法23-38 2.1 统计学习理论23-25 2.2 支持向量机25-33 2.2.1 支持向量机分类26-30 2.2.2 核函数30 2.2.3 支持向量机回归30-33 2.3 遗传算法33-36 2.3.1 遗传算法的基本原理33-34 2.3.2 遗传算法的基本流程34-35 2.3.3 遗传算法的基本操作35-36 2.3.4 遗传算法的特点36 2.4 遗传算法和支持向量机相结合的可行性分析36-37 2.5 小结37-38第3章基于GA-SVM的传感器非线性校正模型的建立38-45 3.1 CYJ-101 型压阻式压力传感器介绍38-41 3.1.1 基本结构38-39 3.1.2 工作原理39 3.1.3 测量电路39-40 3.1.4 主要特点40-41 3.2 压力传感器的非线性校正原理41-42 3.3 基于支持向量机的压力传感器非线性校正模型42-43 3.4 遗传算法实现支持向量机参数优化的过程43-44 3.5 小结44-45第4章传感器非线性校正实例及结果分析45-56 4.1 实验数据45-46 4.1.1 实验标定数据45-46 4.1.2 归一化处理46 4.2 遗传支持向量机校正结果46-51 4.2.1 多项式核函数的遗传支持向量机校正结果47-49 4.2.2 径向基核函数的遗传支持向量机校正结果49-51 4.3 支持向量机校正结果51-53 4.3.1 多项式核函数的支持向量机校正结果51-52 4.3.2 径向基核函数的支持向量机校正结果52-53 4.4 BP 神经网络法校正结果53-54 4.5 结果分析54-55 4.6 小结55-56第5章传感器非线性校正系统的硬件和软件设计56-66 5.1 系统总体设计56 5.2 硬件部分设计56-61 5.2.1 压力传感器56 5.2.2 程控放大器56-57 5.2.3 A/D 转换电路57-58 5.2.4 AT89C51 单片机58-60 5.2.5 LED 显示60-61 5.2.6 RS-232 实现61 5.3 软件部分设计61-65 5.3.1 软件整体设计及主要子程序61-64 5.3.2 遗传算法子程序64-65 5.3.3 支持向量机算法子程序65 5.4 小结65-66总结与展望66-67参考文献67-72致谢72-73附录A:攻读学位期间所发表的学术论文73。
传感器非线性补偿处理
在完成了非线性参数的线性化处理以后,要进行工程量转换,即标度变换,才能显示或打印带物理单位(如℃)的数值,
其框图如图1。
图1 数字量非线性校正框图下面介绍非线性软件处理方法。
用软件进行“线性化”处理的方法有三种:1. 计算法 2. 查表法程序流程图,如图2所示。
图2 挨次查表法程序流程图3. 插值法(1)插值原理设某传感器的输出特性曲线(例如电阻—温度特性曲线)如图3所示。
图3 分段先行插值原理
(2)插值法的计算机实现下边以点斜式直线方程(4-37)为例,讲一下用计算机实现线性插值的方法。
第一步,用试验法测出传感器的变化曲线y=f(x)。
其次步,将上述曲线进行分段,选取各插值基点。
第三步,确定并计算出各插值点的xi、yi值及两相邻插值点间的拟合直线的斜率ki,并存放在存储器中。
第四步,计算x-xi 。
第五步,找出x所在的区域(xi, xi+1),并取出该段的斜率ki。
第六步,计算ki(x-xi)。
第七步,计算结果y=yi+ki(x- xi)。
程序框图见图4。
图4 先行插值计算程序流程图
1。

智能系统的非线性矫正原理智能系统的非线性矫正原理是指通过对智能系统中的非线性部件进行修正和矫正,从而提高系统的性能和准确度。
非线性矫正是智能系统中非常重要的一部分,它能够使系统在工作过程中更加稳定、精确和可靠。
智能系统通常由线性和非线性两个部分组成,其中非线性部分是由一些复杂的因素引起的,比如温度、压力、湿度等。
这些因素会导致智能系统在运行过程中出现非线性响应,影响到系统的工作效果。
所以,在设计智能系统时,非线性矫正原理是非常重要的,它能够对系统的非线性部分进行修正,提高系统的稳定性和性能。
非线性矫正原理的核心是通过模型修正方法来分析系统的非线性特性,并对其进行修正和矫正。
主要分为以下几个步骤:1. 系统建模:首先,需要对智能系统进行建模,确定系统的非线性特性,比如非线性函数形式和参数。
可以采用经典的非线性模型(如多项式模型、神经网络模型等)或者数据驱动的模型(如回归分析、支持向量机等)来描述系统的非线性特性。
2. 系统辨识:在建立了系统模型之后,需要对模型进行辨识,即通过实际的实验数据来确定模型的参数。
可以通过参数估计方法(如最小二乘法、最大似然估计等)或者优化算法(如遗传算法、蚁群算法等)来求解模型的参数。
3. 系统矫正:在确定了系统的模型和参数之后,可以通过矫正方法来对模型进行修正和矫正。
主要有以下几种方法:a. 非线性反馈控制:通过在系统中加入反馈回路,根据系统的输出信号对输出进行矫正。
可以采用PID控制器,模糊控制器等方法,通过调整控制器的参数来实现非线性矫正。
b. 非线性预测控制:通过模型预测方法,根据系统的预测结果对输出进行矫正。
可以采用神经网络预测模型、支持向量机预测模型等方法,通过调整模型的参数来实现非线性矫正。
c. 自适应控制:根据系统的实时变化情况,对系统的模型和参数进行调整和修正,从而实现非线性矫正。
可以采用模型参考自适应控制、模型误差自适应控制等方法,通过调整自适应参数来实现非线性矫正。
计算与测试基于RBF神经网络的传感器非线性误差校正方法*侯立群,张智娟,仝卫国(华北电力大学自动化系,河北保定071003)摘要:介绍了利用人工神经网络进行传感器非线性误差校正的原理。
提出了传感器非线性误差校正的径向基函数(RBF)神经网络方法,并与采用BP神经网络校正非线性误差进行了比较。
最后给出了一个仿真实验,实验结果表明:采用RBF神经网络可以明显提高网络收敛速度,大大减小传感器非线性误差,校正效果优于BP神经网络。
关键词:神经网络;径向基函数;非线性误差;校正中图分类号:TP212文献标识码:A文章编号:1000-9787(2004)03-0043-03Nonlinear errors correcting method of sensors basedon RBF neural networkHOU L-i qun,ZHANG Zh-i juan,TONG We-i guo(Dept of Automation,North China Electric Power University,Baoding071003,C hina)Abstract:The principles for correcting the nonlinear errors of the sensors with a neural network are introduced.The method of radial basis function neural network(RB FNN)is given to correct the nonlinear errors of the sensors.A BP neural network has been developed to solve the same problem for comparison.The experimental results show that network learning speed can be sped up markedly and nonlinear errors of the sensors can be greatly reduced by using RBFNN.RB FNN is q ui te effective and superior to BPNN in correcting nonlinear errors of the sensors.Key words:neural network;radial basis function(RBF);nonlinear errors;correction0引言在测控系统中,一般采用传感器对被测参数进行拾取和转换。