非线性校正
- 格式:ppt
- 大小:2.71 MB
- 文档页数:69
Led显示屏专业术语解释1.什么是LED?LED是发光二极管的英文缩写(LIGHT EMITTING DIODE),显示屏行业所说的“LED”特指能发出可见光波段的LED。
2.什么是像素?LED显示屏的最小发光像素,同普通电脑显示器中说的“像素”含义相同。
3.什么是像素点间距?由一个像素点中心到另一个像素点中心的距离。
4.什么是LED显示模块?由若干个显示像素组成的,结构上独立、能组成LED显示屏的最小单元。
典型有“8×8”、“5×7”“5×8”等,通过特定的电路及结构能组装成模组。
5.什么是DIP?DIP是DOUBLE IN-LINE PACKAGE的缩写,双列直插式组装6.什么是SMT?什么是SMD?SMT就是表面组装技术(surface mounted technology的缩写)是目前电子组装行业里最流行的一种技术和工艺SMD是表面组装器件(surface mounted device的缩写)7.什么是LED显示模组?由电路及安装结构确定的、具有显示功能,能通过简单拼装实现显示屏功能的基本单元8. 什么是LED显示屏?通过一定的控制方式,由LED器件阵列组成的显示屏幕9. 什么是直插灯模组?优点和缺点是什么?指DIP封装的LED灯将灯脚穿过PCB板,通过焊接将锡灌满在PCB板孔内,由这种工艺作成的模组就是直插灯模组。
优点:视角大、亮度高、散热好、可用于室外缺点:像素密度小、生产工艺复杂10. 什么是表贴模组?优点和缺点是什么?表贴也叫做SMT,将SMT封装的灯通过焊接工艺焊接在PCB板的表面,灯脚不用穿过PCB板优点:视角大、显示图象柔和、像素密度大、适合室内观看缺点:亮度不够高、LED灯的自身散热不好11. 什么是亚表贴模组?优点和缺点是什么?亚表贴是介于SMT和DIP之间的一种产品,其LED灯的封装表面和SMT一样,但它的正负极引脚和DIP的一样,生产时也是穿过PCB板来焊接优点:亮度高、显示效果好缺点:工艺复杂、维修困难12. 什么是三合一?优缺点是什么?将R、G、B三种不同颜色的LED晶片封装在同一个胶体内优点:生产工艺简单、显示效果好,缺点:分光分色难、成本高13. 什么是3拼1?指将R、G、B三种不同颜色的LED晶片独立封装14. 什么是伪彩、全彩显示屏?伪彩是有红色、绿色LED组成的显示屏,全彩是有红色、绿色、兰色LED组成显示屏15. 什么是发光亮度?LED显示屏单位面积所发出的光强度,单位是cd/㎡16. 什么是亮度等级?整屏亮度在最低到最高亮度之间的手动或自动调节的级数17. 什么是灰度等级?在同一亮度等级下,显示屏从最暗到最亮之间的技术处理级数18. 什么是最大亮度?在一定的环境照度下,LED显示屏三基色在最大亮度和最大灰度等级时的亮度。
第30卷 第6期2007年12月电子器件Ch inese Jou r nal Of Elect ro n DevicesVol.30 No.6D ec.2007N on 2L inea r ity Cor r ection of A er oengine Selsyn 3F E NG L ei 2xi n g1,2,X I E S hou 2s hen g 1,YA N G Yu 2,H E X iu 2ra n11.Engi neeri ng Coll ege ,The Ai r F orce En gi neeri ng Uni versit y ,Xi ’an 710038,Chi na;2.Measu rement technique st af f room ,T he F i rst Ai r F orce En gi neeri ng Aeronaut ic Col lege ,Xi n gyang Henan 464000,Chi na )Abstract :In order to correct the non 2linearit y error and i mprove t he measuring precision of aer oengine sensors sys 2tem ,non 2linearit y correction based on Functional 2li nk neural net work makes up for the traditional met hods ’disad 2vant ages ,such as much calculation and low precision ,it reduced t he non 2linearity error ,Simulation result s indica 2ted that t hi s met hod has merit s of hi gh prec i sion and speediness ,absolute error does not surpa ss 0.07degree ,com 2pletely meets t he measurement request ,it is al ready adopt ed in Aeroengine t est system on t he ground and al so ap 2plys to f ull aut horit y digit al electronic cont rol (FADEC)system.K ey w or ds :aeroengi ne ;non 2linearit y correction ;functional 2li nk neural net wor k ;sel syn EEACC :1295;7620某型航空发动机自整角机非线性校正技术3冯雷星1,2,谢寿生1,杨 钰2,何秀然11.空军工程大学工程学院,西安710038;2.空军第一航空学院计量技术教研室,河南信阳464000收稿日期6226基金项目陕西省基础研究计划资助项目(55);空军科研基金资助项目(3K 5)作者简介冯雷星(2),男,助教,学士,在读硕士研究生,研究方向为航空推进系统控制与状态监控,8@63;谢寿生(52),男,教授,空军级专家,博士生导师,主要从事航空推进系统控制、故障诊断及现代控制理论与应用摘 要:为克服非线性误差,提高航空发动机上传感器系统的测量精度,采用基于函数链神经网络的非线性校正技术,弥补了传统方法计算量大、精度不高的不足,减小了非线性误差.仿真结果表明此方法速度快,计算精度高,绝对误差不超过0.07o ,完全满足测量要求,已在发动机地面试验系统中得到应用,该方法可应用于航空发动机全权限数字式电子控制(FADEC)系统中.关键词:航空发动机;非线性校正;函数链神经网络;自整角机中图分类号:TP212 文献标识码:A 文章编号:100529490(2007)0622163203 在某型航空发动机中,低压压气机导流叶片角、高压压气机可调定子角度以及发动机喷口临界截面积是相当重要的调节参数[1],自整角机对这些参数信号测量的精度和速度直接关系到发动机的控制品质和大机动飞行的安全.因此,为了确保发动机保持一定的喘振裕度以及提高发动机的飞行品质,对这些传感器信号的精确测量和控制显得犹为重要.1 自整角机工作原理自整角机由带有呈120o 星型连接的三个绕组的圆柱铁磁材料定子和一个铁磁材料做成的转子组成.它的工作原理如图1所示,S 1,S 2和S 3为三相绕组,中间的为单相绕组.使用时,单相绕组接正弦交流激磁电压u f ,频率为400Hz.工作时,单相绕组作为转子,通过滑环、电刷外接正弦交流激磁电压u f ,频率为400Hz ,整步绕组作为定子,取绕组中的S 2绕组为基准绕组或参考绕组,用单相绕组轴线和S 2绕组轴线的夹角θ表示某一时刻转轴转角的位置.当单相激磁绕组接正弦电流后,这个电流就产生一个脉振磁场B f ,忽略电枢反应和磁势、电势中的高次谐波影响,三相绕组中的感应电势和单相激磁电压二者的频率、相位相同,而感应电势的幅值(或有效值)取决于夹角θ.设正弦交流激磁绕组以n r/min 的转速恒速旋8:200120:200E111200J0170:19799120421.co m 199.图1 自整角机结构原理图转,星型输出绕组感应电势亦为正弦交流电势,如果所有绕组都相同(k 1=k 2=k 3)、所有移相都一样(<1=<2=<3),则每对定子接线端之间的电压为[2].e s 13=e s 30-e s 10=K cos ωt si n a (1)e s 32=e s 20-e s 30=K cos ωt sin (a +120o)(2)e s 21=e s 10-e s 20=K cos ωt sin (a +240o)(3)因此有:E 21=e s 32-e s 13=K si n ωt[cosθ-cos (θ+120o )](4)E 23=e s 32-e s 21=K si n ωt[cos θ-cos (θ-120o )](5)这样,自整角机就把角度信号转换为2个感应电势差,它们是同频率但幅值各随角度变化的电压信号,通过对这2个电势差信号的处理后便得到了角度值.2 函数链神经网络法图2所示为一函数链神经网络.W j (j =0,1,…n )为网络连接权值,它的个数与反非线性多项式的阶数相同[3].假设神经网络的神经元是线性的,神经网络的输入值为:1,u 1,u i …u n ,u i 为静态试验中标定点的输出值,则神经网络的输出值为:x e s ti(k )=∑nj =0u j iW j(k )(6)图2 函数链神经网络 其中x est i (k)为输出估计值,将x est i (k)估计值与标定值x i 进行比较,经神经网络学习算法不断调整权值W j 直到估计误差的均方值足够小.估计误差为:e i (k )=x i -x esti (k )(7)权值调节式为:W j (k +1)=W j (k)+ηi e i (k)u ji(8)W j (k )为第j 个连接权值,ηi 为学习因子,它影响迭代的稳定性和收敛速度.当权值调节趋于稳定时(e i (k)→0),所得权值即为反非线性拟合方程:x i (u i )=a 0+a 1u i +a 2u 2i +…+a n u in(9)的定常系数a 0…a n .3 函数链神经网络的应用3.1 神经网络的训练为了对神经网络进行训练,必须现场采集输入训练样本和与输入样本对应的输出目标值.假设自整角机反非线性特性拟合方程为3阶:x i (u i )=a 0+a 1u i +a 2u i 2+a 3u i3(10)表1是在不同输入角度下实测的输出部分样本.表1 训练样本单位:(o )标定角度输出角度标定角度输出角度标定角度输出角度0.00 2.5113.0011.8925.4025.713.75 4.7215.0015.2227.0526.236.00 6.1217.1217.7230.0030.569.0010.2519.3520.1333.5430.4510.5011.3222.5022.0635.5037.47 按照训练误差小于0.5%进行训练,学习因子取ηi =0.5最后得到神经网络权值为:W 0=1.9726,W 1=0.7240,W 2=0.0111,W 3=-0.00013.2 实例仿真自整角机信号的测量方法是将转角转换成2个信号的相位差,通过电路将相位差转换成可以测量的电压信号,典型的相位时间电压转换法由式()和(5)变换得[25]E (θ)=13E 21∠90o -E 23+13(E 21+E 23)=K sin (ωt -θ+120o)(11)这样,信号E (θ)与激磁电源信号A si n ωt 之间的相位差只与θ有关,再将相差转化为时间.设两同频正弦信号过零点时刻差为Δt ,且Δt Φt 0/2,t 0为周期,则相位差<=Δ×36,已知周期,只要测出Δ,则得到<加入神经网络以后整个测量原理框图如图34612电 子 器 件第30卷8--.44:t/t 00o t 0t ..图3 基于神经网络的智能传感器测量系统实验测试结果如表2所示.表2 实验结果单位:(o)输入角度原测量系统输出角度神经网络输出角度0.00 2.530.053.55 4.72 3.516.00 6.12 5.989.0010.259.0510.5011.3210.5714.2513.8914.2115.0015.2214.9517.1217.7217.0520.0522.9820.0225.0023.2524.9430.5432.5830.5835.5037.2135.45 由表2可以看出未经过非线性修正之前,自整角机传感器存在较大的非线性,加入函数链神经网络后非线性得到了校正,取得满意的结果,其均方误差为:0.0949%.图4实线为原测量系统的输出结果,虚线表示加入神经网络后的输出结果,显示函数链神经网络在克服系统噪声、量测误差的优良性能.图4 两种测量系统结果对比4 结论通过实例仿真表明,采用函数链神经网络完全满足测量要求,没有必要采用复杂高级的神经网络修正自整角机的非线性,由于此方法算法简单,编程容易,所以在发动机地面试验系统中已经得到应用,在不改变原有硬件基础上测量精度完全满足试验要求,节约了试验成本.另外,基于函数链神经网络的非线性校正技术可以实现采用低精度低稳定性的测量系统而获得高精度的测量结果,对于航空发动机全权限数字式电子控制(FAD EC)系统的发展具有重要意义.参考文献:[1] 谢寿生.某型加力涡扇发动机[M ].空军工程学院出版社,2002,1662189.[2] 张伦译.传感器和信号调节[M].清华大学出版社.2004,2662270.[3] 刘君华.智能传感器系统[M ].西安电子科技大学出版社,2004,1972204.[4] 陆际清,刘峥.汽车发动机燃料供给与调节[M ].清华大学出版社,2002,1422144.[5] 何秀然,钱坤.基于相关函数的航空发动机自整角机信号测试[J ].传感器技术.2005,24(4):67272.[6] 朱庆保.用神经网络技术实现的光纤位移传感器[J ].计量学报.2004,25(2),1812184.[7] 汪晓东.RB F 神经网络在传感器校正中的应用[J ].仪器仪表学报,2003,24(1):96298.[8] 党选举,谭永红.基于神经网络的热电偶传感器的智能信号处理[J ].计算机工程.2004,30(6),25227.[9] 蔡兵.基于神经网络的AD590温度传感器非线性校正技术[J ].化工自动化及仪表.2004,31(4),41243.5612第6期冯雷星,谢寿生等:某型航空发动机自整角机非线性校正技术8。
传感器非线性误差的修正摘 要:传感器在采集数据时存在一定的非线性误差。
要使系统的性能达到最佳,必须对传感器的非线性误差进行分析和处理。
本文讨论了传感器非线性误差的几种处理方法,并对各种方法作了比较。
关键词:非线性误差,硬件电路校正,查表法,插值法,最小二乘法,频域修正法一、 引言在工业过程控制中,由于传感器的非线性输出特性和同种传感器的输出存在一定的分散性,测量结果会产生一定的误差。
为此,我们需要对传感器的特性进行校正和补偿,以提高测量的精度,并且使传感器输出线性化和标准化。
对非线性误差的矫正和补偿可以采用硬件电路或者软件的方法来实现。
二、 采用电路进行非线性误差的矫正采用硬件电路对非线性误差进行矫正,优点是速度快;缺点是价格高,拟合程度不好。
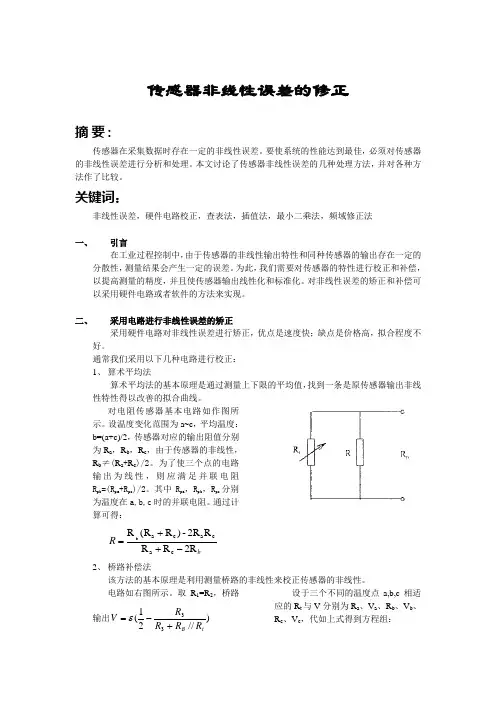
通常我们采用以下几种电路进行校正:1、 算术平均法算术平均法的基本原理是通过测量上下限的平均值,找到一条是原传感器输出非线性特性得以改善的拟合曲线。
对电阻传感器基本电路如作图所示。
设温度变化范围为a~c ,平均温度:b=(a+c)/2,传感器对应的输出阻值分别为R a ,R b ,R c ,由于传感器的非线性,R b ≠(R a +R c )/2。
为了使三个点的电路输出为线性,则应满足并联电阻R pb =(R pa +R pc )/2。
其中R pa ,R pb ,R pc 分别为温度在a,b,c 时的并联电阻。
通过计算可得: b R R 2R R R 2R -)R (R R c a ca c ab -++=2、 桥路补偿法该方法的基本原理是利用测量桥路的非线性来校正传感器的非线性。
电路如右图所示。
取R 1=R 2,桥路输出)//21(33tB R R R R V +-=ε 设于三个不同的温度点a,b,c 相适应的R t 与V 分别为R a 、V a 、R b 、V b 、R c 、V c ,代如上式得到方程组:)//21(33ab a R R R R V +-=ε )//21(33bb b R R R R V +-=ε )//21(33cb c R R R R V +-=ε解此方程组可得到满足要求的R3、R B 、ε。
第二节分立元件行扫描后级电路分析
四、行输出电路中的非线性失真及校正
1.行扫描正程后半段非线性失真及校正
(1)原因
主要因行输出管饱和时ce间电阻和偏转线圈中的直流电阻引起,造成锯齿波电流后半段失真。
(2)校正方法
采用行线性校正线圈。
2.行扫描正程前半段非线性失真及校正
(1)原因
主要因阻尼二极管的导通电阻和偏转线圈中的直流电阻引起。
(2)校正方法
是改变激励电压使得行输出级提前导通(为反向饱和导通)。
3.荧光屏两边的延伸失真及S校正
(1)原因
因荧光屏曲率小,必然产生延伸失真。
(2)校正方法
采用校正电容,图中的C441、C442为S校正电容。
S校正电容要求具有与行输出管相同的高耐压要求。
S校正电容损坏,会造成无光栅故障。
三线性系统校正中的非线性效应及其对系统性能的影响非线性效应在三线性系统校正中起到重要的作用,对系统性能有着直接的影响。
本文将探讨三线性系统校正中的非线性效应,并分析其对系统性能的影响。
首先,我们需要了解什么是三线性系统校正。
三线性系统校正是一种通过调整系统的输入和输出信号,以减小系统的误差和提高系统的性能的方法。
在三线性系统校正的过程中,我们通常假设系统是线性的,即系统的输出是输入的线性组合。
然而,在实际应用中,系统往往具有一定的非线性特性。
非线性效应是指系统输出与输入之间的关系不是简单的线性关系。
例如,在输入信号较大的情况下,系统的输出可能会产生非线性失真,输出信号与输入信号之间存在非线性畸变。
这种非线性效应在三线性系统校正中必须得到充分考虑。
非线性效应对系统性能的影响可以从多个方面进行分析。
首先,非线性效应会导致系统的输出失真。
当输入信号较大时,系统的输出信号可能会发生非线性畸变,这会降低系统的准确性和精度。
因此,在三线性系统校正中,需要采取相应的措施来减小非线性失真,以提高系统的输出质量。
其次,非线性效应会增加系统的噪声。
非线性效应会导致信号的非线性失真,这会引入额外的噪声,从而影响系统的信噪比。
在三线性系统校正中,需要注意非线性效应对系统的噪声性能的影响,并采取相应的方法来降低噪声水平,以提高系统的灵敏度和可靠性。
此外,非线性效应还会影响系统的动态响应特性。
在三线性系统校正中,我们通常关注系统的响应时间、稳定性和抗干扰能力等性能指标。
非线性效应会引入额外的相位延迟和频率失真,从而影响系统的动态响应特性。
因此,需要在系统设计和校正中考虑非线性效应的影响,并采取相应的措施来调整系统的动态响应特性,以满足性能要求。
最后,非线性效应会增加系统的复杂性和难度。
三线性系统校正中通常需要进行复杂的数学建模和仿真,以分析系统的性能和优化系统的参数。
非线性效应的存在会增加系统的复杂性和难度,因为非线性效应不能简单地用线性模型来描述。
非线性自校正一 传感器非线性校正原因智能仪表的模拟输入通道一般由传感器、前置放大电路、有源滤波器、采样保持电路(S/H)、A/D 转换器和微机系统等电路组成。
传感器非线性的产生是生产过程中敏感芯片在工艺上处理不当造成的,为提高精度对其进行非线性的线性化校正在许多测试计量场合中是十分必要的。
由于电子元器件性能参数的离散性、稳定性和温度敏感性等问题,目前还得不到根本的解决。
因此,从传感器到A/D 转换之间的任何一个环节都存在非线性的问题,使得A/D 转换值n 与被测量x 不成线性关系,即n ≠ax+b(a 、b 为常数)。
如果不解决这种非线性问题,将会严重影响智能仪表的测量精度。
这里我们只讨论传感器的非线性校正方法。
传感器就是一种以一定的精确度将被测物理量(如位移、力、加速度等)转换为与之有确定对应关系的、易于精确处理和测量的某种物理量的测量部件或装置。
狭义地定义为:能把外界非电信号转换成电信号输出的机器或装置。
传感器的作用就是把光、声音、温度等各种物理量转换为电子电路能处理的电压或电流信号。
理想传感器的输入物理量与转换信号量呈线性关系,线性度越高,则传感器的精度越高,反之,传感器的精度越低。
在自动检测系统中,我们总是期望系统的输出与输入之间为线性关系,但在工程实践中,大多数传感器的特性曲线都存在一定的非线性度(有时又称为线性度与积分线性度)误差,另外,非电量转化电路也会出现一定的非线性。
传感器非线性特性产生的原因从传感器的变换原理可以看出,利用各类传感器把物理量转换成电量时,大多数传感器的输出电量与被测物理量之间的关系都存在一定的非线性,这是数据采集系统产生非线性特性的主要原因,其次是变换电路的非线性,现分别叙述如下:1.1传感器变换原理的非线性。
如用热敏电阻测量,热敏电阻Rt 与t 的关系是:Rt=A ・exp(B/T) (1)式中,T=273+t,t 为摄氏温度;A,B 均为与材料有关的常数,显然Rt 与t 呈非线性。
非线性误差校正方法1、网格尺寸为26” X 20”,x方向为26”,y方向为20”。
以下示图与Campost中网格方向一致。
yA(0,20) x方向D(26,20)2、非线性误差校正是通过改变固定位置的偏移量来达到校正的效果。
具体描述如下:偏移量offset(x, y)的单位换算:1 = 0.5mil;偏移量的正负:正值代表缩短;负值代表拉长;B点为圆点,不存在偏移量offset。
B(0,0) C(26,0)20”方向拉长万分之一A(0,20) D(26,20)y如上图要求校正:y方向拉长万分之一,即20000 X 0.0001 = 2mil 对应偏移量的值为4;x方向拉长万分之一,即26000 X 0.0001 = 2.6mil 对应偏移量的值为5.2.。
给出A, C, D 三点座标如下:A(0,20) --- A.offset(e, -4)C(26,0) --- C.offset(-5, e)D(26,20) --- D.offset(-5, e)偏移量的值只能取整数,偏移量为e表示程序自动计算。
同理可得缩短的校正方法。
3、矩形的校正B(0,0) C(26,0)20”点向下移动1mil三点座标如下:A(0,20) --- A.offset(e, e)C(26,0) --- C.offset(e, 2)D(26,20) --- D.offset(e, 2)第一步确保B点即原点对齐,然后对准A点;C,D两点相对A,B两点向上,偏移量给正值;C,D两点相对A,B两点向下,偏移量给负值;4、综合2、3两部的校正给出A, C, D 三点座标如下:A(0,20) --- A.offset(e, -4)C(26,0) --- C.offset(-5, 2)D(26,20) --- D.offset(-5, -2)D点的y值= A点的y值+ C点的y值。
现代电子技术Modern Electronics Technique2024年4月1日第47卷第7期Apr. 2024Vol. 47 No. 70 引 言伴随航天应用的蓬勃发展,使用卫星进行数据传输通信变得越来越广泛,卫星将语音、视频等数据信号调制成无线电波回传至地面,再由地面高速数传解调器恢复数据序列,目前实用速率已经达到吉量级。
为利用有限的频带资源,提高数传传输速率,常用的手段是采用高阶调制波形提高每个码元携带的信息量。
但是,高阶信号更易受系统非线性影响出现接收灵敏度下降的现象。
而实际卫星链路又由多级变频器、放大器等构成,群时延、交调等各种非线性干扰复合在一起,不易定量分析、做到逐项分离。
本文旨在寻找一种通用的解决办法,通过消除链路非线性干扰提高卫星信号的接收性能。
1 高速数传信道均衡及面临的问题高速数传解调器对卫星下行信号的解调处理流程一般采用如图1所示方案。
中频信号经过模拟信道调理,滤除带外噪声,以最佳幅度进入采样电路,采样后的数字信号经过载波恢复算法消除多普勒频差以及相位误差,再经过数字重采样算法完成符号同步,解调后的基带信号均衡后传送至后端进行后续处理。
因高速数传解调器处理的各环节都使用并行运算[1⁃2],这导致资源与复杂度随接收信号带宽的增加而快速增长。
从实现性角度考虑,所选算法都需要尽可能简单可靠。
图1 传统高速数传处理流程一种宽带非线性信道校正方法刘景元1, 王 威2(1.西南电子技术研究所, 四川 成都 610036; 2.北京跟踪与通信技术研究所, 北京 100094)摘 要: 针对高速数传解调器接收宽带高阶调制信号时因信道非线性导致的性能恶化问题,提出一种基于两层自适应均衡网络的非线性信道校正方法。
该方法先利用递归最小二乘法获得Volterra 非线性前置校正系数,再利用自适应基带均衡器消除信道的剩余影响,以提升解调器的捕获跟踪能力,并在高速数传解调器工程应用中实现2.4 Gb/s 16QAM 信号的稳定接收。