车辆四轮转向系统的控制方法_郭孔辉
- 格式:pdf
- 大小:142.32 KB
- 文档页数:4
四轮转向原理四轮转向原理是指汽车在行驶过程中通过四个轮子的转向来实现方向的控制。
在汽车的转弯过程中,为了保持车辆的稳定性和平衡性,四个轮子需要协调转动,以使车辆转弯更加平稳和灵活。
我们来了解一下四轮转向的基本原理。
四轮转向系统由前轮转向系统和后轮转向系统组成。
前轮转向系统控制前轮的转向,后轮转向系统控制后轮的转向。
前轮转向系统分为机械转向和电子转向两种形式,通过转向柱和转向齿轮的传动来实现前轮的转向。
后轮转向系统通过电脑控制后轮的转向角度,以实现更好的转弯半径和操控性能。
四轮转向的好处之一是提高了车辆的操控性能。
传统的汽车只有前轮转向,转弯时需要通过前轮的转向实现方向的改变,这样容易造成车辆的侧滑和不稳定。
而四轮转向系统可以通过控制后轮的角度来提高车辆的操控稳定性,使车辆转弯更加平稳和灵活。
四轮转向还可以提高车辆的安全性。
在紧急情况下,四轮转向可以提高车辆的灵活性和响应速度,减少事故的发生。
特别是在高速行驶和突发情况下,四轮转向可以快速改变车辆的行驶方向,使驾驶员更容易控制车辆,避免事故的发生。
除了提高操控性能和安全性,四轮转向还可以提高驾驶的舒适性。
四轮转向系统可以根据驾驶员的操作和行驶条件自动调整轮子的转向角度,使车辆的操控更加轻松和舒适。
特别是在低速行驶和倒车时,四轮转向可以减小转弯半径,使驾驶更加方便和轻松。
然而,四轮转向也有一些局限性。
首先,四轮转向系统相对传统的前轮转向系统来说更加复杂和昂贵,需要更多的传感器和控制装置来实现。
其次,四轮转向系统对路况和驾驶员的操作要求较高,如果驾驶员操作不当或驾驶在恶劣的路况下,可能会导致车辆失控或不稳定。
四轮转向原理是一种提高车辆操控性能、安全性和驾驶舒适性的技术。
通过控制前轮和后轮的转向角度,使车辆转弯更加平稳和灵活,提高车辆的操控稳定性和响应速度。
尽管四轮转向系统相对复杂和昂贵,但它的优点远大于缺点,是汽车行业不断追求的方向。
未来随着科技的进步和人们对驾驶体验的要求不断提高,四轮转向技术将会得到更广泛的应用和发展。
一种四舵轮AGV的运动控制方法四舵轮AGV是一种具有四个轮子和独立转向能力的自动导航车辆。
它通过控制轮子的旋转和转向来实现车辆的运动,因此运动控制方法对AGV 的性能和精度至关重要。
在本文中,我们将介绍一种基于目标轨迹的四舵轮AGV运动控制方法。
首先,我们需要确定AGV的目标轨迹。
目标轨迹是指AGV需要沿着其移动的路径。
可以通过以下几种方式确定目标轨迹:1.磁带:在地面上安装磁带,AGV通过磁力进行导航,将磁带作为目标轨迹。
2.激光导航:在AGV周围安装激光导航器,通过激光扫描地面上的特征点来确定目标轨迹。
3.视觉导航:通过在AGV上安装摄像头,通过图像处理技术识别出地面上的目标轨迹。
确定了目标轨迹后,我们需要实现具体的运动控制方法。
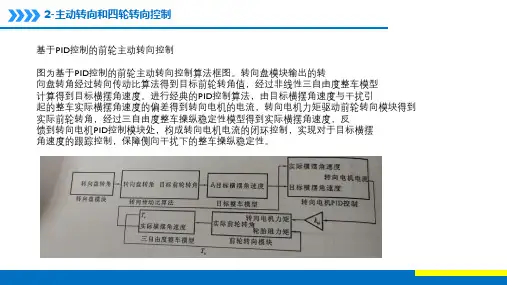
这里我们介绍一种基于PID控制的运动控制方法。
PID控制是一种常见的控制方法,它通过不断调整输出来使系统达到期望的状态。
PID控制器由比例项(P)、积分项(I)和微分项(D)组成。
首先,我们需要将目标轨迹转换成车体坐标系下的局部坐标系。
车体坐标系以AGV车体为原点,与全局坐标系垂直。
局部坐标系以AGV当前位置为原点,与车体坐标系平行。
通过转换,我们可以将目标轨迹变成车体坐标系下的一系列坐标点。
接下来,我们需要设计转向控制器。
转向控制器根据车体当前位置和目标轨迹的坐标点计算输出,控制AGV的转向角度。
转向控制器的设计原则是使AGV既能稳定地跟随目标轨迹,又能适应目标轨迹的突然变化。
转向控制器的输入包括目标轨迹的坐标点、当前位置的坐标和方向,输出为转向角度。
转向角度的计算可以通过PID控制器实现。
PID控制器的计算公式为:输出=Kp*偏差+Ki*积分项+Kd*微分项其中,偏差为目标轨迹与当前位置之间的距离,积分项为过去偏差的累加和,微分项为当前偏差与上一次偏差之差。
Kp、Ki和Kd分别为比例增益、积分增益和微分增益。
根据计算的转向角度,AGV的四个轮子可以分别进行转动和调整速度,从而实现运动控制。
四轮转向汽车的转向特性及控制技术东南大学机械工程系汪东明摘要:本文分析比较了四轮转向汽车的转向特点,概述了电控四轮转向汽车的结构原理,介绍了四轮转向系统的控制策略,指出了四轮转向系统控制技术所面临的困难,并展望其发展趋势。
关键词:四轮转向;转向特点;工作原理;控制;发展。
1、引言随着现代道路交通系统和现代汽车技术的发展,人们对汽车的转向操纵性能和行驶稳定性的要求日益提高。
作为改善汽车操纵性能最有效的一种主动底盘控制技术——四轮转向技术,于二十世纪80年代中期开始在汽车上得到应用,并伴随着现代汽车工业的发展而不断发展。
汽车的四轮转向(Four-wheel Steering ——4WS)是指汽车在转向时,后轮可相对于车身主动转向,使汽车的四个车轮都能起转向作用。
以改善汽车的转向机动性、操纵稳定性和行驶安全性。
2、四轮转向汽车的转向特性2·14WS汽车与2WS汽车转向过程分析普通两轮转向汽车(2WS汽车)的前轮既可绕自身的轮轴自转又可绕主销相对于车身偏转,而后轮只能自转而不偏转。
当驾驶员转动方向盘后,前轮转向,改变了行驶方向,地面对前轮胎产生一个横向力,通过前轮作用于车身,使车身横摆,产生离心力,使后轮产生侧偏,改变前进方向,参与汽车的转向运动。
而4WS汽车的后轮与前轮一样,既可自转也能偏转。
当驾驶员转动方向盘后,前、后轮几乎同时转向,使汽车改变前进方向,实现转向运动。
2WS汽车在转向时,前轮作主动转向,后轮只是作被动转向。
显然,2WS汽车在转向过程中,从方向盘转动到后轮参与转向运动之间存在一定的滞后时间。
2WS汽车的这种相位滞后特性使汽车转向的随动性变差,并使汽车的转向半径增大。
另外,2WS汽车在高速行驶时,相对于一定的方向盘转角增量、车身的横摆角速度和横向加速度的增量增大,使汽车在高速行驶时的操纵性和稳定性变差。
而4WS汽车在转向时,前、后轮都作主动转向,在转向过程中,灵敏度高,响应快,有效地克服了上述缺点。
四轮转向汽车稳定性控制
周淑文;张思奇;许晓东
【期刊名称】《控制工程》
【年(卷),期】2007(14)B05
【摘要】针对过分地追求减小高速转向时的横摆角速度,将导致后轮转角的随动性变差,同时也很难充分利用其机动性来提高稳定性,并且一般有较长时间滞后的问题,提出了一种利用横摆角速度反馈信息,进行再调节的控制方法。
给出一个前轮转角阶跃输入后,不是直接根据当前速度算出后轮转角,而是在忽略后轮的情况下,求出横摆角速度响应,然后和稳态横摆角速度相比较,得出一个需要调整值。
以该值通过一定的关系求出当前需要的后轮横摆角,这个过程重复进行,直到接近最优值。
仿真结果表明,该控制方法能大大缩短四轮转向系统达到稳态的时间。
【总页数】3页(P78-80)
【关键词】四轮转向;横摆率;操纵稳定性;反馈控制;超调量
【作者】周淑文;张思奇;许晓东
【作者单位】东北大学机械工程与自动化学院;沈阳建筑大学交通与机械工程学院【正文语种】中文
【中图分类】TP461
【相关文献】
1.控制器参数对四轮转向和汽车稳定性控制的影响 [J], 秦绪柏
2.极限工况下主动前轮转向汽车稳定性控制 [J], 李绍松; 郭孔辉; 仇韬; 陈虹; 王国
栋; 崔高健
3.转向工况下的分布式电动汽车稳定性控制 [J], 郭烈; 葛平淑; 许林娜; 林肖
4.滑移率控制对改善重型汽车转向制动稳定性的仿真研究 [J], 张婷婷;贾会星;杨章林
5.独立驱动电动汽车转向稳定性控制方法研究 [J], 郭烈;许林娜;孙大川
因版权原因,仅展示原文概要,查看原文内容请购买。
驾驶员四轮转向汽车闭环系统运动稳定性研究南京航空航天大学硕士学位论文驾驶员―四轮转向汽车闭环系统运动稳定性研究姓名:林�鄙昵胙�位级别:硕士专业:车辆工程指导教师:赵又群20210401南京航空航天大学硕士学位论文摘要论文以四轮转向汽车为研究对象。
深入研究了汽车开环系统和驾驶员一汽车闭环系统的运动稳定性。
论文的主要工作如下:1.建立了线性二自由度角输入四轮转向汽车开环系统模型,把人的因素考虑到操纵控制中去,引入郭孔辉院士提出的驾驶员模型,在此基础上推导出驾驶员一四轮转向汽车闭环系统模型及其状态方程。
2.运用现代动力学运动稳定性理论,对前轮转向的汽车开环系统与驾驶员一汽车闭环系统的运动稳定性进行了比较,研究了不同前、后轮转向比控制参数下四轮转向汽车的运动稳定性。
3.运用非对称矩阵特征值问题的矩阵摄动理论和动力学系统结构参数灵敏度理论,定量地揭示了单个和多个汽车参数对驾驶员一四轮转向汽车闭环系统运动稳定性影响的内在规律。
4.提出一神求解菲对称区间矩阵特征值问题的优化方法,并将其运用到驾驶员熟练程度对汽车运动稳定性影响的研究中。
综上所述,本文揭示了汽车开环系统和驾驶员一四轮转向汽车闭环系统运动稳定性的内在规律性和相互关系。
研究结论不但可以指导四轮转向汽车和前轮转向汽车运动稳定性的设计。
从而改善汽车的操纵性能,丽且对汽车动力学及其控制系统的研究也具有一定的借鉴价值。
关键词:四轮转向汽车,驾驶员一汽车闭环系统,运动稳定性,矩阵摄动理论,区间矩阵驾驶员一四轮转向汽车闭环系统运动稳定性研究AbstractThevehiclewithfourwheelsteeringsystem(4WS)isstudiedinthispaper.Themotionstabilitiesofvehiclewith4WSopen-loopsystemanddriver-vehiclewithare:4WSclosed?loopsystemareanalyzed.Themainpurposesofthispaper1.First,atwodegreeoffreedomlinearvehiclemodelwithsteeringangleinputisintroduced.Then,theeffectsofdriverareconsideredinthemanipulatecontrolbyGuoKonghui’sDriverModel.Atlast,themodelandthestateequationsofdriver-vehiclewith4WSareformulated.are2.Thetraditionalvehicleopen―loopsystemanddriver-vehicleclosed?loopsystemcomparativelyanalyzedbasedonmotionstabilitytheoryofdynamics.Then,themotionstabilityofthevehiclewithdifferentbetweenfrontwheeland3.Byusingunsymmetrical4WSisstudiedwhenthesteefingratiosarcrearwheel.matrixperturbationmethodareanddynamicsystemrevealedquantitativelyoneparametersensitivitymethod,someinherentrelationsonorthemotionstabilityofdriver-vehiclewith4WSclosed―loopsystem,whilemultiplevehicleparametersvaried.presentedfor4.Aoptimizationmethodissolvingeigenvalueproblemwithunsymmetricalintervalmatrices.Andthismethodisapplledinthestudyofdriverqualificationeffectsonvehiclemotionstability.Inconclusion,someinherentrulesandrelationsofmotionstabilityofvehiclewith4WSopen―loopsystemanddriver-vehiclewith4WSclosed-loopsystemcallarerevealedinthispaper.Itdirectthedesignofmotionstabilityoftraditionalvehiclemaneuveringcharacteristicscancanandthevehiclewith4WS.Thus,vehiclealsobeimproved.Theresultsofthispaperalsobeappliedintheoptimaldesignofvehicledynamiccontrolsystem.Keywords:Vehiclewith4WS,Driver-VehicleClosed?LoopSystem,MotionStabilityMatrixPerturbationMethod,IntervalMatrix承诺书本人郑重声明:所呈交的学位论文,是本人在导师指导下,独立进行研究工作所取得的成果。
1998年吉 林 工 业 大 学 学 报Vol .28第4期JOU RNAL OF JI LIN UN IVERSITY OF TECH NOLOGY 总第92期收稿日期:1998-03-02*国家自然科学基金(5957522)资助项目郭孔辉,男,1935年7月生,教授,中国工程院院士车辆四轮转向系统的控制方法*郭孔辉 轧 浩(吉林工业大学汽车动态模拟国家重点实验室)摘 要 系统地评述了车辆四轮转向系统的原理及其控制方法的发展,在此基础上指出四轮转向系统的研究必须以闭环综合评价为出发点,并与其它主动安全技术相结合才能真正达到实用阶段。
关键词 四轮转向 闭环评价 反馈控制 优化控制 神经网络随着汽车技术的发展,作为实现主动安全性的方法之一的四轮转向技术日益受到重视。
很多汽车厂商纷纷推出了带有四轮转向系统的概念车,如Honda ,Nissan ,M azda 等,并把一些成熟的四轮转向技术应用到了普及型汽车中,提高了汽车的主动安全性。
四轮转向汽车的主要优点是在转向时能够保持重心侧偏角基本为零,极大地改善了横摆角速度和侧向加速度的瞬态性能指标。
另外低速时能够减小汽车的转弯半径(前后轮转角方向相反),使汽车在低速行驶时更加灵活。
四轮转向系统按其结构可分为四类:机械式、液压式、电动式和复合式。
按其控制方法〔2,3〕可分为:①定前后轮转向比四轮转向系统〔4〕;②前后轮转向比是前轮转角函数的四轮转向系统;③前后轮转向比是车速函数的四轮转向系统〔4〕;④具有一阶滞后的四轮转向系统;⑤具有反相特性的四轮转向系统〔5〕;⑥具有最优控制特性的四轮转向系统〔6〕;⑦具有自学习、自适应能力的四轮转向系统〔3〕。
1 后轮转向机理分析为分析四轮转向车辆的机理,首先从后轮转向的特性分析入手。
本文采用二自由度模型对前、后轮转向车辆进行比较。
1.1 侧向加速度时域特性比较如图1所示,无论高速还是低速行驶,前轮转向车辆和后轮转向车辆的转向轮转动方向相同时(这里指转向轮皆顺时针转动),前轮转向车和后轮转向车所产生的车辆重心处—1—图1 前轮转向车辆和后轮转向车辆阶跃响应比较Fig .1 Comparso n between responsibility of front -wheel steering vehicleand that of rear -w heel steering vehicle×前轮转向车辆v =40m /s ■前轮转向车辆v =10m /s○后轮转向车辆v =40m /s 后轮转向车辆v =10m /s的侧向加速度方向相反。
若将车辆系统近似为线性系统,根据线性系统的叠加原理,若前、后轮同时转动,则整车重心处的侧向加速度稳态值将减小。
这就是说四轮转向车辆要转过与前轮转向车辆相同的曲率时,驾驶员就要增加方向盘的角输入;同理,前、后轮转向相反时,前轮转向车和后轮转向车所产生的车辆重心处的侧向加速度方向相同。
若前、后轮同时转动,则整车重心处的侧向加速度稳态值将增大,当车速过高时增加了车辆侧滑的危险。
1.2 侧偏角时域特性比较图2 侧偏角随车速的变化规律Fig .2 Variation rule of side -slip ang le according to v ehicle speed高速行驶时,若前、后轮转向相同,前轮转向车和后轮转向车所产生的车辆重心侧偏角方向相反。
若将车辆系统近似为线性系统,前、后轮同时转动,则车辆重心侧偏角稳态值将减小,在车辆转弯过程中适当调整前后轮的转角大小就可以使得车辆重心侧偏角的稳态值为零。
高速转向运动时车辆重心侧偏角的稳态值为零是四轮转向车辆的一个公认的优越性。
低速行驶时,前、后轮转向方向相同,前轮转向车和后轮转向车所产生的车辆重心侧偏角方向也相同,其叠加的效果只能使得侧偏角的稳态值增大。
同理,若前、后轮转向相反,车速高时前轮转向车和后轮转向车所产生的车辆重心侧偏角方向相同,车速低时相反。
另外,对于前轮转向车辆,存在一个车速,在这一车速下车辆重心侧偏角稳态值为零,如图2所示。
而对于后轮转向车辆零侧偏角的车速是不存在的。
若以零侧偏角为主要评价指标,则在这一车速下无须施加后轮转向。
—2—2 四轮转向车辆的特点低速时,在后轮上附加一个与前轮反向的转角,可以减小车辆的转变半径。
如图3所示的Ackerman转向模型即可得出这样的结论〔1〕,即当前轮转角相同时,四轮转向车(4WS)转弯半径明显小于前轮转向车(2WS),这就是说4WS车可以轻松地通过2WS车需多次反复倒车才能通过的地方。
近年来研究也指出了4WS车低速转向的缺点,即在有限空间里转弯时,4WS车尾部更易于撞到障碍物,这一方面是由于理论上的原因(如图4所示),另一方面由于4WS车的车身尾部的后悬部位较2WS车伸出要长一些。
图3 A ckerman转向原理Fig.3 T heory of ackerman steering ———前轮转向车辆 ----四轮转向车辆图4 前轮转向车与四轮转向车转向比较Fig.4 Co mparison between front-wheel steering vehicle and four-w heel steering 根据前面的理论分析,四轮转向系统在车辆高速转向时能够基本保持车辆重心侧偏角为零。
传统的前轮转向车辆在转弯时,车辆的前进方向与其纵向中心线的方向不一致,其夹角就是车辆重心侧偏角。
2WS车的车辆重心侧偏角对前轮转向角的增益如图3所示,在某一车速v时车辆重心侧偏角β=0,此时车辆的前进方向(即车辆重心的运动方向)与车辆纵向对称线方向一致。
当车速低于v时重心向与前轮转向角方向相同的方向偏移。
当车速高于v时重心向与前轮转向角方向相反的方向偏移。
当后轮附加某一特定的转角时,将产生与前述相反的重心侧偏角,与前轮产生的重心侧偏角叠加,使车辆侧偏角基本为零。
车辆对轨道的跟踪性得到了极大的改善。
3 结束语尽管目前科研人员从结构到控制原理上对四轮转向进行了大量的研究,但都没有取得突破性进展,四轮转向技术也没有真正地步入实用阶段。
主要因为尽管四轮转向车的—3—一些开环指标(如稳态侧偏角,横摆角速度和侧向加速度的幅相频特性等)有较大程度的改善,但是对其进行主观评价的效果并不理想。
目前我们采用如下与主观评价相接近的闭环性能指标J T =1t n ∫t n 0E E 2+δ·SW δ· 2+y ··y ·· 2+β·β· 2d t 其中E 为轨道误差;δ·为方向盘角速度;y ·为侧向加速度;β·为重心侧偏角速度。
四轮转向系统的研究应该综合考虑车辆的各项特性,这样就能保证主观评价与客观评价的统一性。
另外,四轮转向在接近附着极限的状态下由于侧向力的饱和而不能发挥控制汽车运动的作用,因此,还要把四轮转向技术与其他主动安全技术(如ABS ,ASR ,VDC 等)相结合,才能真正提高车辆的主动安全性。
参 考 文 献1 郭孔辉.汽车操纵动力学.长春:吉林科学技术出版社,19912 李友善.自动控制原理(上、下册).北京:国防工业出版社,19813 吕强.四轮转向车辆的主动控制:〔博士后研究工作报告〕.长春:吉林工业大学,19964 Sano S ,Furukawa Y ,Shlralshi S .Four wheel steering system w ith rear w heel steer ang le contro lled as a function of steering wheel angle .SAE Paper 860625,19865 Eguchl T ,Saklta Y ,Kawagoe K et al .Dev elo pment o f “Super Hicas ”.A New Rear W heel Steering Sy stem with Phaserversal Co ntrol .SA E P aper 89197,19896 Shibahata Y ,Irle N ,I toh H et al .T he development of an experimental four -wheel -steering vehicle .SA E 860623,1986Progress in Controlling Methods ofFour -Wheel -Steering SystemGuo Konghui Y a Hao(National K ey Lab of Automo bile Dynamic S imulation ,Jilin University of Technology )A bstract The theory and development of controlling methods about four -w heel -steering (4WS )sy stem is discussed .It is then presented that 4WS system can be put into practical use only w hen the study ing of 4WS system is started in close -loop evaluation and combined w ith o ther active -safety technology .Key words four -w heel -steering ,close -loop evaluation ,feed -back control ,optimal control ,neural netw orks —4—。