电控式四轮转向系统
- 格式:ppt
- 大小:1.01 MB
- 文档页数:36
汽车电控题库及答案一、填空题每空1分,共17分;1、汽车电子控制技术在汽车底盘上发展,主要包括传动系统电子控制技术转向系统电子控制技术车轮防滑电子控制技术悬架系统电子控制技术;2、传动系统的电子控制主要包括对离合器、变速器各种差速器的主动控制,其中对离合器和变速器的控制主是减轻驾驶负担,提高行车安全性, 提高行车安全性;而对差速器的控制则主要是为了协调车轮运动关系,防止车轮滑动;3、转向系统电子控制技术主要体现在动力转向系统和四轮转向系统中, 以解决车辆转向过程中轻和灵的矛盾,在各种使用工况下, 期望获得更加理想的控制效果;4、对于21世纪初期底盘电子控制技术发展趋势,将围绕节能、环保、安全、舒适等主题展开,其中动力优化控制系统、安全驾驶检测与警告系统、自动防追尾碰撞系统、自动驾驶系统及汽车线传控制技术,将是未来汽车底盘电控技术的优先发展方向;二、简答题每题5分,共15分;1、汽车电子控制技术的发展过程可分为哪几个阶段这几个阶段各有什么特点汽车电子过程经历了4个发展阶段第一阶段为20世纪50年代初期至50年代初期至1974年;这一阶段主要特征是:解决电子装置在汽车上应用的技术难点,开发替代传统机械装置的电子产品,扩大电子装置在汽车上应用的范围第二阶段为1974-1982年;这一阶段主要特征是:以微处理器为控制核心,以完成特定控制内容或功能为基本目的,各自相互独立的电子控制系统得到了快速发展和应用; 第三阶段为1974-1982年;这一阶段主要特征是:一微型计算机作为控制核心,能够同时玩笑横多种控制功能的计算机集中管理系统为基本控制模式,初步实现了汽车控制技术从普通电子控制向现代控制的技术过渡; 第四阶段为1995年至今;这一阶段主要特征是:随着CAN总线技术和告诉车用微型计算机的应用,电子控制系统初步具备了对高复杂程度使用要求的控制能力,汽车电子化开始步入智能化控制的技术高点2、汽油发动机电子控制技术经历了哪几个发展阶段这几个阶段各有什么特点汽油发动机电子控制技术的发展可分为3个阶段:第一阶段为1952—1957年;这一阶段的主要特征是:以提高发动机动力性为主要动力性为主要目的,把飞机发动机燃油喷射技术成功的移植到车用汽油发动机上; 第二阶段为1957—1979年;这一阶段的主要特征是:以减少有害物排放量、降低燃油消耗为主要目的,以空燃比和点火提前角为主要控制内容,相互独立的电子控制汽油喷射系统和电子控制点火系统相继开发成功,汽油发动机的运行控制进入电子控制的新阶段; 第三阶段为1979年至今;这一阶段的主要特征是:把原先相互独立的电控燃油喷射系统和电控点火系统整合为一个系统,即发动机集中管理系统开发成功并投入实际应用;3、柴油发动机电子控制技术的发展过程可分为哪几个阶段这几个阶段各有什么特点柴油发动机电子控制技术的发展过程可分为两个阶段第一阶段为20世纪70—80年代中期;这一阶段的主要特征是:采用位置控制方式,用电子控制的电液式或电磁式线位移或角位移驱动机构,取代原来的机械式调速机构和喷油提前调整装置,实现循环喷油量和喷油定时的电子控制; 第二阶段为20世纪80年代中期至今;这一阶段主要特征是:采用时间控制方式,类似于汽油发动机的集中管理系统在柴油发动机上得到全面应用,电控系统通过高速电磁阀对喷油泵或喷油器过程进行控制,实现喷油定时、循环喷油量和喷油规律的电子控制;第2章汽油发动机电控系统概述一、填空题每空1分,共9分;1、燃油喷射系统按喷油器数目分类,可分为单点喷射、多点喷射;2、电子控制系统由ECU 、传感器、执行元件三部分组成;3、ECU是发动机控制系统核心;4、执行元件受_ECU控制,他们的作用在ECU的控制下,完成特定控制内容;二、选择题每题只有一个正确答案;每题2分,共16分;1、电子控制系统的核心是BA.传感器B. ECUC.执行装置2、燃油喷射系统根据哪种分类可分为连续喷射和间歇喷射BA.燃油喷射位置B.燃油喷射方式C.喷油器数目3、以下哪项通常采用顺序喷射方式BA.机械式汽油喷射系统B.电控汽油喷射系统C.节气门体汽油喷射系统D.以上都正确E.以上都不正确4、在MPI多点汽油喷射系统中,汽油被喷入C ;A.燃烧室内B.节气门后部C.进气歧管D.进气道5、单点喷射系统采用下列哪种喷射方式D;A.同时喷射B.分组喷射C.顺序喷射D.上述都不对6、下列哪项内容属于汽油喷射控制的控制功能AA.电动汽油泵控制B.点火正时C.怠速控制控制7、直接测量方式电控系统采用A ,直接测量出单位时间汽油发动机吸入空气的质量流量或体积流量,然后根据发动机转速,计算每一工作循环吸入的空气量; A.空气流量计B.进气歧管压力传感器C.氧传感器D.上述都不对8、发动机集中管理系统由Bosch公司于1979年首先推出,称为B A.Jetronic B. Motronic 系统D.上述都不对三、判断题正确的打√,错误的打×;每题1分,共15分;1、多点燃油喷射系统中,喷油器多装于节气门上方; ×2、电子控制系统中的信号输入装置是各种传感器; ×3、MPI为多点喷射,即一个喷油器给两个以上气缸喷油; ×4、国内沈阳金杯汽车采用的是单点喷射系统; √5、喷油器是电控发动机燃油喷射系统中的重要执行器; √6、采用同时喷射方式的电控喷射系统,曲轴每转两圈各缸同时喷油一次;×7、现代汽车广泛采用集中控制系统,它是将多种控制功能集中到一个控制单元上; √8、在电控燃油喷射系统中,喷油量控制是基本也是重要的控制内容;√9、发动机集中控制系统中,一个传感器信号输入ECU可以作为几个子控制系统的控制信号; V10、发动机集中控制系统中,各子控制系统所需要的信息是不相同的;×11、随着控制功能的增加,执行元件将会适当的减少; ×12、分组喷射方式中,发动机每一个工作循环中,各喷油器均喷射一次;√13、相对于同时喷射的发动机而言,分组喷射的发动机在性能方面有所提高; √14、多点喷射系统是在节气门上方安装一个中央喷射装置; ×15、顺序喷射按发动机各缸的工作顺序喷油; √四、名词解释每题2分,共6分;1、顺序喷射:喷油器由电脑分别控制,按发动机各缸的工作顺序喷油2、同时喷射:将各缸的喷油器并联,所有喷油器有电脑的同一个指令控制,同时喷油,同时断油;3、分组喷射:将各缸的喷油器分成几组,同一组喷油器同时喷油或断油;五、简答题每题5分,共15分;1、传感器的功用5分将反映发动机运行的机械动作、热状态等物理量,转换成相应的模拟或数字电信号,并输送到电控单元;2、单点喷射和多点喷射各有什么特点单点喷射系统也成为节气门体喷射系统或集中喷射系统,其喷油器安装在进气总管的节气门上方,采用1或2个喷油器;减少了由于喷油器造成的汽油发动机运行故障源,提高电控汽油发动机的工作可靠性;多点喷射系统的喷油器安装在每个气缸的进气歧管内,燃油在进气歧管内与空气混合形成初级混合气;它使各缸混合气的均匀性得到了改善,上课充分利用进的惯性增压效应,实现高功率化设计;3、汽油发动机采用电控汽油喷射有哪些优点1善各缸混合气的均匀性;2发动机的动力性和经济性有一定程度的提高;3害物质排放量显着减少;4善了汽油机过渡工况响应特性;5善了汽油机对地理及气候环境的适应性;6高了汽油机高低温起动性能和暖机性能;六、综合题每题10分,共30分;1、试分析汽油发动机燃油喷射系统的分类缸内喷射1、1按汽油喷入的位置分类多点喷射缸外喷射单点喷射连续喷射2按汽油喷射的方式分类同时喷射间歇喷射分组喷射顺序喷射机械控制汽油喷射系统机械控制方式机电混合控制汽油喷射系统3按汽油喷射系统控制方式分类电控方式汽油喷射系统发动机集中管理系统节流-速度方式间接测量方式电控系统速度-密度方式4按进气量测量方式分类体积流量方式直接测量方式电控系统质量流量方式2、试分析同时喷射、分组喷射和顺序喷射各有什么特点同组喷射方式中,各缸喷油器开始喷油和停止喷油的时刻完全相同,发动机每转一转,各缸喷油器同时喷油一次,发动机一个工作循环所需的油量,分两次喷入进气歧管;同时喷射方式不需气缸判别信号,可用一个控制电路就能控制所有的喷油器、电路与控制软件; 分组喷射方式把汽油发动机的全部气缸分成2组四缸或3组六缸,电控系统用两个或三个控制电路控制各组气缸的喷油器;发动机运行时,各组气缸的喷油器按组依次喷射,同组内两个喷油器按同时喷射方式工作;分组喷射方式各缸混合气的均匀性及空燃比控制精度得到了提高; 顺序喷射方式也称独立喷射方式;发动机运行时,喷油器按各缸的工作顺序喷油, 曲轴每转两转,各缸喷油器按点火顺序依次喷油依次;顺序喷射需要有与喷油器数目相同的控制电路,在控制程序中需增加基准气缸喷别、正时计算、喷油时序控制等内容;3、电子控制装置ECU的主要功能有哪些1给传感器提供电压,接受传感器和其他装置的输入信号,并转换成数字信号;2储存该车型的特征参数和运算所需的有关数据信号;3确定计算输出指令所需的程序,并根据输入信号和相关程序计算输出指令数值;4将输入信号和输出指令信号与标准值进行比较,确定并存储故障信息;5向执行元件输出指令,或根据指令输出自身已储存的信息;6自我修正功能学习功能;第三章电控汽油喷射系统一、填空题每空1分,共17分;1、燃油供给系统的功用是供给清洁的具有一定压力的燃油;2、燃油泵的控制电路主要有ECU控制、燃油泵开关控制、速度控制三种类型;3、节气门位置传感器可分为线性、开关式和综合式三种;4、当喷油器的结构和喷油压差一定时,喷油量的多少就取决于喷油持续时间;5、发动机转速超过安全转速时,喷油器停止喷油,防止发动机损坏;6、凸轮轴/曲轴位置传感器可分为电磁感应式、霍尔式和光电感应式三种类型;7、喷油器按线圈的电阻值可分为电阻值为12-17欧的高阻和阻值为欧的低阻;8、汽油喷射控制的主要内容有喷油持续时间控制喷油正时燃油泵控制停油控制;二、2.选择题每题只有一个正确答案;每题2分,共46分;1、在多点电控汽油喷射系统中,喷油器的喷油量主要取决于喷油器的D ;A.针阀升程B.喷孔大小C.内外压力差D.针阀开启的持续时间2、下列哪种属于间接测量空气流量的传感器;DA.叶片式空气流量计B.热膜式空气流量计C.热线式空气流量计D.进气歧管压力传感器3、一般来说,缺少了C 信号,电子点火系将不能点火;A.进气量B.水温C.转速D.上止点4、Ne信号指发动机C 信号;A.凸轮轴转角B.车速传感器C.曲轴转角D.空调开关5、启动发动机前如果点火开关位于“ON”位置,电动汽油泵D;A.持续运转B.不运转C.运转10s后停止D.运转2s后停止6、发动机关闭后D 使汽油喷射管路中保持残余压力;A.电动汽油泵的过载阀B.汽油滤清器C.汽油喷射器D.单向阀7、某汽油喷射系统的汽油压力过高,以下哪项正确;BA.电动汽油泵的电刷接触不良B.回油管堵塞C.汽油压力调节器密封不严D.以上都正确8、对喷油量起决定性作用的是A ;A.空气流量计B.水温传感器C.氧传感器D.节气门位置传感器9、在A 式空气流量计中,还装有进气温度传感器和油泵控制触点;A.翼片B.卡门旋涡C.热线D.热膜10、负温度系数的热敏电阻其阻值随温度的升高而B ;A.升高B.降低C.不受影响D.先高后低11、检测电控汽车电子元件要使用数字式万用表,这是因为数字式万用表A ;A.具有高阻抗B.具有低阻抗C.测量精确D.以上都正确12、属于质量流量型的空气流量计是B ;A.叶片式空气流量计B.热膜式空气流量计C.进气歧管压力传感器13、计算机能读但不能改写的存储器是:AA. ROMB. RAMC.以上都正确D.以上都不正确14、C 传感器具有自洁功能A.叶片式空气流量计B.热膜式空气流量计C.热线式空气流量计15、空气流量计常用于检测:AA.进气质量B.进气效率C.进气密度16、当结构确定后,电磁喷油器的喷油量主要决定于A;A.喷油脉宽B.点火提前角C.工作温度17、将电动汽油泵置于汽油箱内部的目的下面哪项不正确AA.便于控制B.降低噪声C.防止气阻D.节省空间18、进行燃油压力检测时,按正确的工序应该首先进行以下哪一步CA.断开燃油蒸发罐管路B.将燃油压力表连到电控燃油喷射系统的回流管路上C.在将燃油压力表连接到电喷系统上以前先将管路中的压力卸掉D.拆下燃油机分配器上的燃油管19、微型计算机的作用是根据汽油机运行工况的需要,把各种传感器输送来的信号用A 中的处理程序和数据进行运算处理,并把处理结果送到;A.中央处理器……A/D转换器;B.内存……A/D转换器;C.内存……输出通路;D.中央处理器……输出通路20、带Acc信号输出的开关量输出型节气门位置传感器主要增加了Acc信号,用以检测发动机D 状况;A.怠速B.中速C.高速D.加减速21、桑塔纳2000GSi发动机空气流量计为DA.进行歧管绝对压力传感器B.叶片式C.卡门旋涡式D.热膜式22、下列哪一个部件能够调节燃油系统的供油压力DA.燃油脉动阻尼器B.过滤器C.喷油嘴D.燃油压力调节器23、丰田汽车自诊断系统的触发方式为BA. TE1与TE2端子B. TE1与E1端子C. TE2与E1端子D.以上都不正确三、判断题正确的打√,错误的打×;每题1分,共20分;1、怠速控制分为节气门直动控制型和旁通空气控制型; √2、中央处理器可以直接接收由传感器输送的模拟信号; ×3、电流驱动方式只适用于低阻值喷油器; √4、电动燃油泵是一种由小型交流电动机驱动的燃油泵; ×5、脉动阻尼器的作用是限制燃油系统的高压力; ×6、同时喷射正时控制是所有各缸喷油器由ECU控制同时喷油和停油; √7、在拆卸燃油系统内任何元件时,都必须首先释放燃油系统压力; √8、通过测试燃油系统压力,可诊断燃油系统是否有故障; V9、自诊断系统只能根据传感器输入信号来判定有无故障,但不能确定故障的具体部位; V10、一般来说,缺少转速信号、电子点火关系将不能点火; V11、发动机冷车起动后的暖机过程中,随冷却水温的提高,喷油持续时间加大; ×12、发动机起动时的喷油量控制和发动机起动后的喷油量控制的控制模式完全; ×13、开关型节气门位置传感器只有开或关两个位置; √14、活性炭罐受ECU控制,在各种工况下都工作; ×15、ECU根据凸轮轴位置传感器的信号,来确定发动机转速; ×16、空档起动开关向ECU输入空档位置的信号,是怠速控制信号之一; ×17、ECU给传感器提供的参考电压有2V、5V、9V、12V等; √18、发动机在所有工况下都进行理论空燃比的反馈控制,以便把空燃比控制在附近; ×19、发动机启动后,以固定的点火提前角点火,与发动机的状况无关; ×20、当电控发动机的备用系统启用时,能够使汽车继续行驶,不能保证发动机性能良好; V四、简答题每题5分,共15分;1、燃油压力调节器的作用是什么为什么要安装燃油压力调节器采用压差恒定的控制方法,使ECU能够用单一的控制参数--------喷油器开启时间, 对喷油器进行既简单有精确的控制;因为在喷油器结构参数不变的情况下,喷油量不仅与喷油器保持大开度的时间有关,而且还与燃油分配管的压力、进气歧管的压力有关;进气歧管的压力高喷油量减少,反之增加;燃油分配管内油压越高喷油量增加,反之减少;所以必须使用燃油压力调节器;2、简答电控发动机燃油系统的组成及汽油流动过程;燃油供给系统由油箱、电动燃油泵、汽油滤清器、燃油分配管、喷油器、压力调节器等组成;2分汽油发动机工作时,电动燃油泵从油箱吸入汽油,加压后送到输油管,汽油经输油管、滤清器到达燃油分配管,然后分送到各个喷油器;串联在油路上的压力调节器对汽油的压力进行调节,多余的汽油经压力调节器流回油箱;3、在下图中填上空气供给系统的组成4、简答滚柱式电动汽油泵的工作原理油泵的转子由电动机驱动,当转子在电动机驱动下旋转时,位于转子凹槽内的滚柱在离心力的作用下,紧紧压靠在泵体的内表面和转子的凹槽侧面,在油泵内形成与滚柱个数相同的若干工作腔;由于转子相对泵体偏心布置,当工作腔随转子一起旋转时,每个工作腔的腔内容积将发生由大到小的变化;在腔内容积由小逐渐变大的过程中,工作腔内的压力随腔内容积的增大而降低,处于负压状态,当工作腔转到与进油道相通位置时,汽油在大气压力的作用下被吸入工作腔;在腔内容积由大到小的过程中,工作腔内汽油受到压缩油压升高,当工作腔转到与出油道相通位置时,压力较高的汽油从出油口流出;5、简答电控单元的组成及各部分组成的作用电控单元式汽油发动机电控系统的核心,电控单元主要由输入回路、A/D转换器、微型计算机和输出回路4部分组成;节气门怠速开度控制传感器进气总管进气歧管空气阀空气滤清器空气流量计1.输入回路的作用是对电控系统各类传感器的输入信号进行预处理,然后把这些信号输送到A/D转换器或微型计算机的输入输出接口;2.A/D转换器的作用是将模拟电压信号转换成数字脉冲信号,然后输送到微型计算机的输入/输出接口;3.微型计算机的作用是根据汽油发动机运行工况及各种传感器的输入信号,经过运算分析处理后,确定正确的控制程序和控制参数,并向输出回路发出控制脉冲;4.输出回路的作用是将微型计算机输出的控制信号;转换成可以驱动执行器的输出信号;四、综合题每题10分,共40分;1、参照下图油泵运转控制电路分析:11点火开关IG接通时:;3分当点火开关接通时,主继电器闭合电控系统受电;此时如发动机不起动, 断路继电器断开,所以燃油泵不工作;2汽油发动机起动时:3分汽油发动机起动时,主继电器闭合,断路继电器线圈L2通电,产生电磁吸力使断路继电器油泵开关闭合,油泵开始运转;3汽油发动机运转时:2分汽油发动机正常运转时,分电器即有转速信号输出,该信号使ECU中的晶体管导通,断路继电器线圈L1通电,油泵仍然保持运转状态;汽油发动机起动结束,线圈L2断电,但由于线圈L1仍然通电,故油泵开关仍保持闭合,油泵继续工作;4汽油发动机熄火时:2分汽油发动机熄火时,分电器不再有转速信号输出,晶体管截止,断路继电器线圈L1断电,油泵开关断开,油泵停止工作;2、简述喷油持续时间控制模式分为几种情况每种情况中是如何控制的10分喷油持续时间控制分为发动机起动时的喷油持续时间的控制和起动后喷油持续时间的控制; 1发动机起动时分为冷启动时和高温起动时喷油持续时间的控制;都是根据冷却液温度传感器进行控制的; 2发动机起动后在电控燃油喷射系统中,喷油量控制是基本也是重要的控制内容,其控制原理是:ECU根据空气流量信号和发动机转速信号确定基本的喷油时间,再根据其他传感器如冷却液温度传感器、节气门位置传感器等对喷油时间进行修正,并按后确定的总喷油时间向喷油器发出指令,使喷油器喷油或断油;3、简述喷油器的工作原理;喷油器安装在汽油分配管上,它在结构上是一个电磁阀;当控制器接通喷油器的接地线后,就有电流流过电磁线圈,电磁线圈所产生的磁力将衔铁和针阀吸起而打开喷孔,汽油分配管中的高压汽油高于进气管压力200-255kPa便经喷油器内腔由喷孔喷进气道中,汽油喷出后被分散成雾状;显然,喷油量的多少,在喷油压力不变的情况下,就取决于喷油器的通电时间的长短;控制器正是通过控制主喷油器通电的时间来控制喷油量的;4、简述燃油压力调节器的工作原理;为使控制器能精确控制喷油器的喷油量,必须使汽油分配管中的汽油压力与进气管压力之差保持恒定;然而发动机工作时,这一压差却是变化的,这是因为汽油分配管中的油压在喷油器不同的循环喷油量下是不同的,进气管中的压力在不同的发动机转速、不同的节气门开度下也是不同的;为使发动机工作时这一压差保持恒定, 特设压力调节器;压力调节器安装在汽油分配管上,其结构和工作原理:由于进油与汽油分配管相通,在膜片正下方的压力即为汽油分配管中的油压;若真空软管接通大气,当膜片下方的压力超过304kPa时,膜片就克服弹簧弹力向上拱曲,泄油阀打开汽油经回油口流入回油管直至汽油箱,汽油分配管中的压力下降;若汽油分配管中的压力低于304kPa,弹簧就推动膜片向下拱曲,使泄油阀关闭,在汽油泵的作用下,汽油分配管中的油压升高;这样使汽油分配管中的油压恒定在304kPa,即泄油阀开启压力;当压力调节器上的真空管接口与进气管接通时,发动机工作时的进气管真空度负压就作用到膜片上方,使膜片上方的受力为弹簧弹力与进气管真空度之和;若进气管真空度增大压力降低,泄油阀开启压力相应降低;若进气管真空度减少压力增大,泄油阀开启压力相应升高,这样就使汽油分配管中的压力与进气管中的压力之差保持恒定,一般为255 kPa;。
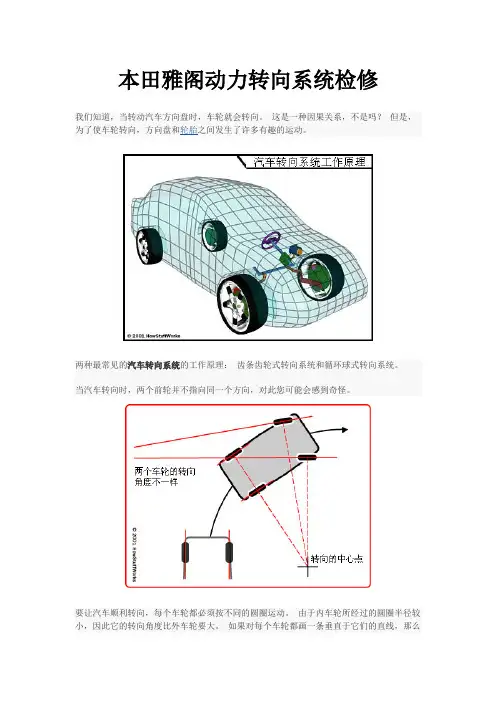
本田雅阁动力转向系统检修两种最常见的汽车转向系统的工作原理:齿条齿轮式转向系统和循环球式转向系统。
当汽车转向时,两个前轮并不指向同一个方向,对此您可能会感到奇怪。
要让汽车顺利转向,每个车轮都必须按不同的圆圈运动。
由于内车轮所经过的圆圈半径较小,因此它的转向角度比外车轮要大。
如果对每个车轮都画一条垂直于它们的直线,那么线的交点便是转向的中心点。
转向拉杆具有独特的几何结构,可使内车轮的转向角度大于外车轮。
齿条齿轮式转向系统已迅速成为汽车、小型货车及SUV上普遍使用的转向系统类型。
其工作机制非常简单。
齿条齿轮式齿轮组被包在一个金属管中,齿条的各个齿端都突出在金属管外,并用横拉杆连在一起。
小齿轮连在转向轴上。
转动方向盘时,齿轮就会旋转,从而带动齿条运动。
齿条各齿端的横拉杆连接在转向轴的转向臂上(请参见上图)。
齿条齿轮式齿轮组有两个作用:将方向盘的旋转运动转换成车轮转动所需的线性运动。
提供齿轮减速功能,从而使车轮转向更加方便。
在大多数汽车中,一般要将方向盘旋转三到四周,才能让车轮从一个锁止位转到另一个锁止位(从最左侧转到最右侧)。
度)会导致车轮转向。
比率有些汽车使用可变传动比转向系统,在此系统中,齿条齿轮式齿轮组的中心与外侧具有不同的齿距(每厘米的齿数)。
这不仅能提高汽车转向时的响应速度(齿条靠近中心位置),还能减少车轮在接近转向极限时的作用力。
动力齿条齿轮当在动力转向系统中应用齿条齿轮时,齿条的设计会略有不同。
部分齿条包含一个中心有活塞的圆筒。
活塞连接在齿条上。
圆筒上有两个油孔,分别位于活塞的两侧。
当向活塞的一侧注入高压液体时,将迫使活塞向另一侧运动,进而带动齿条运动,这样便提供了辅助动力。
将在随后介绍提供高压液体的组件,它同时也能决定向齿条的哪一侧供应这些高压液体。
首先,来了解另一种转向系统转向器分为几种类型。
最常见的是齿条齿轮式转向器和循环球式转向器。
目前,众多货车和SUV上都在使用循环球式转向系统。
底盘电控技术题库第一章底盘电控技术概述一、填空(1)汽车底盘电子控制主要包括:电控自动变速器、防抱死制动系统、驱动防滑系统、电控悬架系统、转向控制系统等。
(2)自动变速器分为:液力自动变速器、手动式机械变速器、无级变速器。
(3)转向控制主要包括动力转向控制和四轮转向控制。
(4)空气弹簧悬架和油气弹簧悬架是主动悬架。
二、判断题(1)半主动悬架可调节减振器的阻尼力,有些还可以调节横向稳定器的刚度。
(√)(1)半主动悬架仅对悬架系统的刚性进行调节。
(×)(1)主动悬架随时对悬架系统的刚度、减振器的阻尼力进行调整。
(√)(1)主动悬架仅对悬架系统的刚性进行调节。
(×)(1)主动悬架仅对减振器的阻尼力进行调节。
(×)(2)空气弹簧是主动悬架。
(√)(2)空气弹簧是被动悬架。
(×)(2)空气弹簧是半主动悬架。
(×)(3)油气弹簧是主动悬架。
(√)(3)油气弹簧是被动悬架。
(×)(3)油气弹簧是半主动悬架。
(×)(4)世界上第一台ABS系统首先被应用于航空领域的飞机上。
(√)(4)世界上第一台ABS系统首先被应用于航海领域的轮船上。
(×)(5)ASR也被称为牵引力控制系统(Traction Control System),简称TCS。
(√)(5)ABS也被称为牵引力控制系统(Traction Control System),简称TCS。
(×)(6)主动悬架调节需要消耗能量,故系统中需要能源。
(√)(6)主动悬架调节不需要消耗能量,故系统中不需要能源。
(×)(7)半主动悬架调节不需消耗能量,故系统中不需要能源。
(√)(7)半主动悬架调节需消耗能量,故系统中需要能源。
(×)三、简答题1、汽车驱动防滑控制的英文写法Anti Slip Regulation2、汽车制动防滑控制的英文写法Anti-lock Brake System3、空气弹簧概念空气弹簧是一种通过改变空气弹簧的空气压力来改变弹性元件刚度的主动悬架。

AUTOMOBILE EDUCATION | 汽车教育汽车底盘构造是汽车能源与动力工程专业的一门必修课程。
课程内容包括传动系概述、离合器、手动变速器、自动变速器、四驱驱动系统和分动器、万向传动装置、驱动桥、车架与车桥、车轮与轮胎、悬架、机械转向系统、动力转向系统、制动器、制动传动装置、汽车制动系统电控技术15个项目。
随着汽车底盘电控技术的发展,相应增加电子控制动力转向系统、四轮转向系统、制动防抱死系统、驱动防滑控制系统。
汽车底盘构造课程在传统教学中主要以课件演示,教师讲授为主,教学方法单一,学生掌握情况参差不齐;理论学时与实践学时分配不合理,而本课程又是一门实践性较强的课程。
因此,本文将基于OBE教学理念,合理利用现代化的教学手段,以项目驱动式教学法[1]、案例教学法、讨论法等多种方法进行教学,使学生能直观感知理论,更好地掌握专业知识,培养具有工程实践能力的高素质应用型专门人才。
1 汽车底盘构造课程在传统教学中存在的问题1.1 汽车底盘构造课程在教学方法上存在的问题汽车底盘构造课程在传统教学中存在的问题主要是以课件演示,教师讲授为主。
以黄河交通学院汽车能源与动力工程专业为例,教师在讲授汽车底盘结构中能运用多媒体课件,使学生直观看到汽车底盘各部件的组成及工作原理,相较于板书,挂图要好很多。
若教学方法运用不恰当,仍然存在一些问题。
第一,没有以学生为中心,多数教师在授课过程中过多依赖课件,缺乏与学生交流互动,学生都是被动学习,学生学习的积极性和能动性受限,教学效果较差。
对于离合器、变速器、差速器等部件只结合视频讲解,缺乏延伸讲解,很难培养学生的空间想象能力,抽象思维能力以及对问题的思考和分析能力。
第二,教学进度较快,学生跟不上。
使用多媒体课件演示能够优于板书,挂图,往往演示完就结束,给予学生掌握理解的时间过少;或者内容量过大,导致重难点不突出,学生学习兴趣也会降低,教学效果不好。
第三,课件制作较差。
没有精心设计教学内容,多是大篇幅的文字介绍或者照搬其他课件内容,导致教学目标不明确,学生掌握情况参差不齐。
英语缩写:1、EFI(Electronic Fuel Injection System):电控的汽油喷射系统。
2、MPI(multi point injection):多点喷油系统。
3、SPI(single point injection):单点喷油系统。
4、VSC(Vehicle Stability Control System):车辆稳定性控制系统。
5、ESP(Electronic Stability Program):电子稳定程序。
6、VDC(或VSC):车辆动态控制系统。
7、4WS:四轮转向系统。
8、ABS(Antilock Braking System):制动防抱死装置。
9、ASR(Acceleration Slip Regulation):加速防滑控制系统【驱动(轮)防滑系统】。
10、TCS(Traction Control System):牵引力控制系统。
11、EBD(Electric Brakeforce Dis-tribution):电子制动力分配系统。
12、HEV(Hybrid Electric Vehicle):混合动力电动汽车。
13、ECU:电子控制单元。
14、PCM:动力系统控制模块结构组成:1、电控汽油喷射系统由:进气系统、供油系统、控制系统及点火系统组成。
2、供油系统由:电动汽油泵、燃油滤清器、喷油器(燃油喷嘴)、燃油压力调节器(简称油压调节器)及燃油分配管、回油管等组成。
3、控制系统由:传感器、电子控制单元(ECU)及执行器组成。
4、ECU的组成:运算器、寄存器和控制器组成。
5、电控汽油喷射系统的执行器主要有:怠速执行器、喷油器、喷油泵、EGR阀(废气再循环)、碳灌电磁阀等。
6、点火系统主要由:与点火有关的各种传感器、电子控制单元(发动机控制ECU)、执行器组成。
7、传感器主要由:曲轴位置传感器、凸轮轴位置传感器、负荷传感器、温度传感器、爆震传感器等组成。
8、执行器主要由:点火模块、点火线圈、高压配电器和火花塞等组成。

《汽车新技术》试题一、选择题(每题2分,共8分。
)1、汽车诞生在( )年。
A.1885 B.1888 C.18862、长春一汽制造出的中国第一辆汽车是()。
A.解放牌4T载货汽车B.东风牌轿车C.黄河牌货车D.红旗轿车3、()汽车尾部过分向后伸出,形成阶梯状,在高速时会产生较强的空气涡流。
A.箱型B.流线型C.船型D.楔形4、甲壳虫型汽车是()成功设计的。
A.卡尔·本茨B.雪铁龙C.费迪南德·保时捷D.恩佐·法拉利5、下列哪种属于间接测量空气流量的传感器。
()A. 叶片式空气流量计B. 热膜式空气流量计C. 热线式空气流量计D. 进气歧管压力传感器6、某汽油喷射系统的汽油压力过高,以下哪项正确。
()A. 电动汽油泵的电刷接触不良B. 回油管堵塞C. 汽油压力调节器密封不严D. 以上都正确7、对喷油量起决定性作用的是( )。
A. 空气流量计B. 水温传感器C. 氧传感器D. 节气门位置传感器8、负温度系数的热敏电阻其阻值随温度的升高而( )。
A. 升高B. 降低C. 不受影响D. 先高后低9、属于质量流量型的空气流量计是()。
A. 叶片式空气流量计B. 热膜式空气流量计C. 进气歧管压力传感器10、空气流量计常用于检测:()A. 进气质量B. 进气效率C. 进气密度11、当结构确定后,电磁喷油器的喷油量主要决定于()。
A. 喷油脉宽B. 点火提前角C. 工作温度12、废气再循环的作用是抑制( )的产生。
A. HCB. COC. NOxD.有害气体13、进入进气歧管的废气量一般控制在( )范围内。
A. 1%~2%B. 2%~5%C. 5%~10%D. 6%~13%14、在( )时废气再循环控制系统不工作。
A. 行驶B. 怠速C. 高转速D. 热车15、采用三元催化转换器必须安装( )。
A. 前氧传感器B. 后氧传感器C. 前、后氧传感器16、如果三元催化转换器良好,后氧传感器信号波动( )。
线控四轮转向系统的结构和原理-概述说明以及解释1.引言1.1 概述线控四轮转向系统是一种先进的汽车转向技术,通过控制车辆的四个轮子分别转向,实现更加灵活和稳定的转向效果。
与传统的前后轮联动转向系统相比,线控四轮转向系统可以提升车辆的操控性和行驶稳定性,同时也能够实现更小的转弯半径和更高的转向效率。
该系统通过电子控制单元(ECU)来实现对车辆转向的精准控制,根据车辆速度、转向角度、操控输入等参数,动态调整四个轮子的转向角度,从而使车辆实现更加灵敏和平稳的转向操作。
此外,线控四轮转向系统还可以根据不同的行驶状态和路况,自动调整转向参数,提升车辆的驾驶安全性和舒适性。
在未来的汽车发展中,线控四轮转向系统将成为越来越重要的技术,为驾驶员提供更加便捷和安全的驾驶体验,同时也有助于提升汽车的燃油经济性和环保性能。
通过深入了解线控四轮转向系统的结构和原理,我们可以更好地理解其优势和应用前景,为未来的汽车发展指明方向。
1.2 文章结构文章结构部分的内容如下:文章结构部分旨在介绍本文的整体结构和各个章节的内容安排。
本文主要分为引言、正文和结论三个部分。
在引言部分,我们将概述线控四轮转向系统的基本概念和重要性,介绍文章的结构和目的,旨在引导读者对本文进行初步了解和认识。
在正文部分,我们将详细介绍线控四轮转向系统的概述、结构和原理,包括系统的组成部分、工作原理和技术特点,以及系统在汽车行驶中的作用和应用场景。
在结论部分,我们将对本文进行总结,概括线控四轮转向系统的关键信息和特点,展望其未来的发展方向和应用前景,为读者提供对该系统的深入理解和思考。
通过以上内容安排,本文将全面介绍线控四轮转向系统的结构和原理,帮助读者深入了解和掌握该技术的核心知识和应用价值。
1.3 目的目的部分:本文旨在深入探讨线控四轮转向系统的结构和原理,旨在帮助读者更好地理解这一先进的汽车转向技术。
通过对线控四轮转向系统的概述、结构和原理进行分析和解释,读者将能够全面了解该系统的工作原理和优势,从而对其应用前景有更清晰的认识。

《汽车新技术》试题一、选择题(每题2分,共8分。
)1、汽车诞生在( )年。
A.1885 B.1888 C.18862、长春一汽制造出的中国第一辆汽车是()。
A.解放牌4T载货汽车 B.东风牌轿车 C.黄河牌货车 D.红旗轿车3、()汽车尾部过度向后伸出,形成阶梯状,在高速时会产生较强的空气涡流。
A.箱型 B.流线型 C.船型 D.楔形4、甲壳虫型汽车是()成功设计的。
A.卡尔·本茨 B.雪铁龙 C.费迪南德·保时捷 D.恩佐·法拉利5、下列哪种属于间接测量空气流量的传感器。
()A. 叶片式空气流量计B. 热膜式空气流量计C. 热线式空气流量计D. 进气歧管压力传感器6、某汽油喷射系统的汽油压力过高,以下哪项对的。
()A. 电动汽油泵的电刷接触不良B. 回油管堵塞C. 汽油压力调节器密封不严D. 以上都对的7、对喷油量起决定性作用的是( )。
A. 空气流量计B. 水温传感器C. 氧传感器D. 节气门位置传感器8、负温度系数的热敏电阻其阻值随温度的升高而( )。
A. 升高B. 减少C. 不受影响D. 先高后低9、属于质量流量型的空气流量计是()。
A. 叶片式空气流量计B. 热膜式空气流量计C. 进气歧管压力传感器10、空气流量计常用于检测:()A. 进气质量B. 进气效率C. 进气密度11、当结构拟定后,电磁喷油器的喷油量重要决定于()。
A. 喷油脉宽B. 点火提前角C. 工作温度12、废气再循环的作用是克制( )的产生。
A. HCB. COC. NOxD.有害气体13、进入进气歧管的废气量一般控制在( )范围内。
A. 1%~2%B. 2%~5%C. 5%~10%D. 6%~13%14、在( )时废气再循环控制系统不工作。
A. 行驶B. 怠速C. 高转速D. 热车15、采用三元催化转换器必须安装( )。
A. 前氧传感器B. 后氧传感器C. 前、后氧传感器16、假如三元催化转换器良好,后氧传感器信号波动( )。
一、填空题1.发动机只有在位时才能起动,如果在位以外也能起动,应调整多功能开关。
2.汽车电子稳定控制(ESP),当车辆转向不足时,ESP系统使用发动机和变速器管理系统并有意识地对位于弯道内侧的后轮实施制动,防止车辆驶出弯道。
3.行星轮与行星架之间的间隙,其标准间隙为~。
4.根据行驶条件,随时对悬架系统的刚度、减振器的阻尼力以及车身的高度和姿势进行调节,使汽车的有关性能始终处于最佳状态的悬架是主动悬架。
5.车轮和车身状态只能被动地取决于路面及行驶状况以及汽车的弹性支承元件、减振器和导向机构的悬架是被动悬架。
6.自动变速器按齿轮变速器的不同分为行星齿轮式和平行轴式两种类型。
7.变矩器的传动比等于涡轮与泵轮之比。
8.自动变速器液压控制系统中调节压力的阀有主调压阀、次级调压阀和节气门阀等。
9.电子控制悬架系统能根据路况和行驶条件主动调节弹簧刚度或减振器阻尼系数,提高乘坐舒适性和操纵稳定性,被称为主动悬架。
:10.评价制动效能的主要评价指标有制动距离、制动时间和制动减速度。
系统中车速传感器主要由传感器头和齿圈组成。
12.电控ABS由传感器、电子控制单元和执行机构组成。
13.循环式制动压力调节器在汽车制动过程中,ECU 控制流经制动压力调节器电磁线圈的电流大小,使ABS出于升压、保压和减压三种状态。
14.无级自动变速器主动轮组和从动轮组都由可动盘与固定盘组成。
的传感器主要是车轮车速传感器和节气门开度传感器。
16.加速度传感器常用的有差动变压器式和球位移动式两种。
17.悬架电子控制单元的ECU一般由输入电路、微处理器、输出电路和电源电路等组成。
18.电子控制动力转向系统,根据动力源不同可分为液压电子控制动力转向系统和电动式电子控制动力转向系统。
19.本田车系ABS采用四轮独立控制方式,每个车轮上有一个制动压力调节器调节制动压力。
,系统是防止制动时车轮抱死而滑移,ASR是防止驱动轮原地不动而不停的滑转。
21.汽车电子控制悬架系统的执行机构有可调阻尼力减振器,可调节弹簧高度和弹性大小的弹性元件等。
车辆转向系统的研究作者:李广涛来源:《中国机械》2013年第20期摘要:汽车转向系统是车辆安全行驶的前提保障,介绍了汽车转向系统的组成以及工作原理,分析不同转向系统的优、缺点,同时指出未来汽车转向系统的发展趋势以及有待解决的问题。
关键词:转向系统;机构;驱动;控制1.引言随着科学技术的发展车辆已经成为人们不可或缺的工具,车辆在路面上的行驶方向是通过转向系统来控制的,转向系统的性能直接决定了车辆安全可靠性。
加之转向系统良好的操纵性能,使得车辆可以适应不同的路况,从而提高车辆的燃油经济性和减少轮胎的磨损。
当今社会,人们生活质量的提高,使得市场对车辆的舒适性要求越来越高,一个优秀的转向系统可以使驾驶员更加便捷,轻巧的操纵车辆。
因此对车辆转向系统的研究极其重要。
2.转向的基本要求及其关键技术为了车辆转向时实现无侧滑转向,前轮定位角要求必须等于零,使车辆拥有刚性的行走系统,当无侧向力时,所有车轮以同一瞬时中心相对地面作圆周滚动。
设计时要求满足阿克曼特性公式:图1 转向示意图Fig 1 Schematic diagram of steering两轮车辆转向是由转向机构带动的,为了减小车辆转向时的侧滑现象,应尽可能使车辆在整个转向过程中满足阿克曼特性公式。
因此车辆转向系统的关键技术是:(1)从运动角度分析,设计时车辆转向系统的结构应精确的满足阿克曼特性公式(2)从机构和系统的角度分析,转向系统应满足图2的相互关系。
图2 转向传动系统的组成Fig2 Composition of Steering System3.转向系统3.1. 机械转向系统机械转向系统是一种最基本的转向系统,结构设计简单,主要依靠驾驶员的臂力操纵,没有设计任何的助力系统。
机械转向系统设计时可以通过增加转向器的角传动比来解决其笨重的问题,但同时也会造成转向系统反应迟缓。
机械转向系统已经不能够适应车辆的发展。
因此,助力转向系统应运而生。
3.2.液压动力转向系统液压动力转向系统(Hydraulic Power Steering System,HPS)是在机械转向系统的基础上,通过增加液压动力装置,使得转向系统更加轻便。
汽车底盘电控技术真题1、判断题超速挡主要用于汽车在良好路面上轻载或空载运行,以提高汽车的燃料经济性。
正确答案:对2、判断题丰田车系防抱死制动与驱动防滑(ABS/TRC)工作时,当需要对驱动轮(江南博哥)施加制动力矩时,TRC的3个电磁阀都不通电。
()正确答案:错3、问答题简述ASR的工作原理。
正确答案:驱动防滑转系统在驱动过程中通常可以通过调节发动机的输出转矩、传动系的传动比、差速器的锁紧系统等,控制作用于驱动车轮的驱动力矩,以及通过调节驱动轮制动缸(或制动气室)的制动压力,控制作用于驱动车轮的制动力矩,实现对车轮牵引力矩的控制,将驱动车轮的滑动率控制在较为理想的范围内。
4、单选自动变速器主要由液力变矩器、齿轮变速系统和()组成。
A、液压控制系统B、离合器C、液压油泵D、制动器正确答案:A5、判断题车轮抱死时将导致制动时汽车稳定性变差。
()正确答案:对6、单选换档执行元件中的制动带由于结构特点,在更换时应()。
A.保持干燥的状态B.涂抹自动变速器液C.在自动变速器液浸泡一下即可D.在自动变速器液浸泡15min以上正确答案:D7、判断题转向控制主要包括动力转向和四轮转向控制。
()正确答案:对8、单选主减速器可以实现()。
A.减速增矩;B.倒车;C.车轮差速;D.万向传动正确答案:A9、单选自动变速器亦使用特氟融密封环,下列说法不正确的是()。
A.特氟融密封环比起矩形密封环,允许油液有少量的泄漏B.特氟融密封环常用于静态密封C.特氟融密封环两端采用斜交口D.特氟融密封环多装在转轴上,用于液压口的密封正确答案:B10、问答题简述电控ABS的工作原理。
正确答案:电控ABS的核心是电子控制单元(ECU),它通过传感器监视汽车制动时车轮是否抱死。
在一般的制动情况下,驾驶员踩在制动踏板上的力较小,车轮不会被抱死,ECU无控制信号输出,这时,就如同普通的制动系统,制动力完全由驾驶员踩在制动踏板上的力来控制。
在紧急制动或是在松滑路面行驶时制动,车轮将要被抱死的情况下,ECU就会输出控制信号,通过执行机构(即制动压力调节器)控制制动器的制动力,使车轮不被抱死。
基于线控技术的四轮转向全滑模控制郑凯锋;陈思忠;王亚【摘要】A total sliding mode controller is proposed to improve the stability for four-wheel steering vehicle with steer-by-wire technology. By controlling the steering angle of front wheel and rear wheel, the total sliding mode controller can make the real body sideslip angle and yaw rate track the ideal body sideslip angle and yaw rate. The integration of tracking error is considered in the sliding surface to ensure the tracking error to be zero. Then, a stable condition is given based on Lyapunov theory. The conventional front wheel steering, four-wheel steering with common sliding mode control and total sliding mode control are compared by simulations under different vehicle models and different conditions. The results show that the total sliding control not only ensures the tracking error to be zero, but also improves the robustness to resist the external disturbance and the change of system parameters.%针对具有线控技术的四轮转向车辆,设计了一种全滑模控制器用于提高车辆的操纵稳定性.以前、后车轮转角作为控制输入,设计全滑模控制器使实际的质心侧偏角和横摆角速度跟踪理想的质心侧偏角和横摆角速度,通过在滑模面中加入跟踪误差积分项来消除稳态跟踪误差不为零的现象,并运用Lyapunov定理给出了全滑模控制器的稳定条件.最后通过2种车辆模型下不同工况的仿真分析,对比了传统前轮转向、常规滑模控制的四轮转向和全滑模控制的四轮转向的动力学响应,结果表明所设计的全滑模控制器不仅消除了稳态跟踪误差不为零的现象,而且提升了车辆抵抗外界干扰和系统参数摄动的鲁棒性.【期刊名称】《东南大学学报(自然科学版)》【年(卷),期】2013(043)002【总页数】6页(P334-339)【关键词】四轮转向;全滑模控制;仿真【作者】郑凯锋;陈思忠;王亚【作者单位】北京理工大学机械与车辆学院,北京100081【正文语种】中文【中图分类】U461.1随着汽车电子技术的不断发展和汽车系统的集成化,基于线控技术的四轮转向(4WS)将成为车辆底盘主动控制的重要组成部分[1].它取消了传统的机械式转向系统,转向信号通过传感器传递给电控单元,然后经电控单元分析处理后将控制信号传递给转向电机,转向电机则根据控制信号产生所需的转向扭矩,从而实现驾驶员的转向意图[2].早期4WS只控制后轮转角[3],之后Nagai等[4]指出同时控制前、后轮转角可以更好地提升车辆转向性能.基于该思路,以跟踪理想质心侧偏角和横摆角速度为目标,同时控制前后轮转角的前馈加反馈型控制得到较多研究[5-6].但当车辆存在侧向风干扰和系统参数摄动时,这种控制器的鲁棒性并不是很好,因此,一些基于H∞理论、μ理论和滑模理论的鲁棒控制器得到进一步研究[7-10].文献[7]设计的滑模鲁棒控制器考虑了多个系统参数的摄动,包括整车质量、轮胎侧偏刚度、横摆转动惯量等.文献[8]将设计的4WS滑模控制器进行了侧向风稳定性仿真以及在不同路面下车辆操纵稳定性仿真.文献[9]对最优控制和滑模控制进行了对比性仿真分析.文献[10]则通过模糊算法将最优控制和滑模控制相结合,实现了协调控制.总结以上这些滑模控制器可以发现,滑模控制器由等价控制器和鲁棒控制器2部分组成,且都是基于选定的滑模面来设计的.滑模面的选择对整个控制性能有很大影响,以上文献都将质心侧偏角和横摆角速度跟踪误差向量再乘以常值矩阵作为滑模面,这样设计的控制器虽然在一定程度上抑制了外界的干扰和参数摄动,具有一定的鲁棒性,但在稳态扰动存在时,并不能使跟踪误差为零.为了克服这一缺陷,参照文献[11],本文提出了一种全滑模控制器,通过在滑模面中加入误差积分项来消除稳态干扰下跟踪误差不为零的现象.在不同工况下对2种车辆模型的仿真分析验证了这种控制器的良好性能.1 车辆动力学模型考虑参数摄动和外界干扰时,车辆的两自由度模型[8]可由下面的状态方程表示:(1)其中式中,ΔA,ΔB为具有线性特性的系统参数摄动矩阵;Fw(t)为外界干扰输入;β为车辆质心侧偏角;r为横摆角速度;δf,δr分别为前、后轮主动转角;m为整车质量;u为车辆纵向速度;Iz为车辆横摆转动惯量;a,b分别为车辆前、后轴到车辆质心的距离;kf,kr分别为车辆前、后轴轮胎侧偏刚度(此处的刚度为同轴两轮刚度之和).由于矩阵B满秩可逆,故系统(1)满足匹配条件,即存在矩阵Mi(i=1,2,3)使下式成立:ΔA=BM1, ΔB=BM2, EwFw(t)=BM3(t)(2)匹配条件的成立意味着系统的不确定输入与控制输入处于同一通道中,因此可通过合理的控制算法设计抵消或者减弱不确定因素对系统控制的影响.结合式(3)和式(1)可得(3)式中,d(x,t)=M1X+M2U+M3(t)为系统参数摄动和外界干扰等不确定因素的总和.2 车辆理想转向模型理想的转向一方面要求尽量减小质心侧偏角,使车辆在转向时拥有良好的行驶轨迹与车身姿态;另一方面要求尽量保证转向灵敏度(横摆角速度稳态增益)与传统的前轮转向汽车一致,即保持驾驶员感觉不发生较大变化[8].根据这2个目标,并考虑一阶惯性环节的车辆理想转向模型,可表述成下列状态方程形式:(4)其中式中,βd,rd分别为理想质心侧偏角和横摆角速度;kβd,krd分别为质心侧偏角稳态增益和横摆角速度稳态增益,此处取kβd=0;τβ,τr分别为一阶惯性环节时间常数,根据经验此处取τβ=τr=0.2 s;δfd为理想前轮转角输入.3 全滑模面控制器设计基于线控技术和滑模理论,可以设计全滑模控制器,同时控制前、后轮转角输入使实际车辆转向模型跟踪理想车辆转向模型.由此可定义状态跟踪误差为(5)对式(5)求导可得Ade+(Ad-A)X+BdUd-B[U+d(x,t)](6)构造具有积分项的跟踪误差滑模面为S=[s1 s2]T=e+γe(τ)dτ-e(0)(7)式中,γ为加权矩阵.对式(7)求导可得(Ad+γ)e(0)+(Ad-A)X+BdUd-B[U+d(x,t)](8)若令且d(x,t)=0,由式(8)可得等价控制律为B-1[(Ad-A)X+BdUd](9)将式(9)代入式(8),并考虑d(x,t)=0,可得误差滑模面的导数为(10)在传统的滑模控制中,若特征值全在负半轴,即Ad+γ<0成立,则当t→∞时有S→∞成立.在本文的控制策略中,选择Ad+γ=0,即γ=-Ad,从而有成立.根据式(7)可知S(0)=0.和S(0)=0确保了系统初始时刻就处于滑模面的切换平面上,因而系统不存在趋近模态,称为全滑模面变结构控制[11].此时等价控制输入便可简化为Ueq=B-1[(Ad-A)X+BdUd](11)从上面的设计过程可看出,全滑模控制器式(11)是基于d(x,t)=0时式(4)的模型而设计的,当系统发生参数摄动或受到外界干扰时,控制器式(11)将不能确保成立,因此需要设计一个鲁棒控制器来稳定系统,抑制参数摄动和外界扰动.设计鲁棒控制器为Urob=B-1[K1S+K2sgn(S)](12)联合等价控制器式(11)和鲁棒控制器式(12),可得到针对系统(1)所设计的全滑模面控制器为U=Ueq+Urob(13)将式(13)代入式(8)中可得=-K1S-K2sgn(S)-Bd(x,t)(14)令Bd(x,t)=W(x,t),式(14)可写为(15)式中,K1,K2为2×2的常值系数矩阵.为了保证实际跟踪误差轨迹限制在跟踪误差滑模面上,且系统渐近稳定,定义Lyapunov函数为VT=STS/2,对其求导并将式(15)代入可得=S=-STK1S-STK2sgn(S)-STW(x,t)=(16)为了使滑模面解耦,可令k12=k13=k22=k23=0,则有w1(x,t)s1-w2(x,t)s2<(k24-)(17)从式(17)可看出,当式(18)成立时,则有成立.根据Lyapunov定理,可知系统渐近稳定.即按照下式适当给定鲁棒控制器的常值矩阵,就能使所设计的全滑模控制器式(13)抑制系统参数摄动和外界干扰:(18)此外,为了抑制由全滑模控制器引起的抖振问题,将控制器中的切换函数sgn(si)用饱和函数sat(si)替代,取饱和函数为(19)4 仿真分析本节将采用线性二自由度模型(2DOF)和非线性八自由度模型(8DOF)这2种车辆模型来验证所设计的全滑模控制器的鲁棒性.在2DOF模型中,通过加入侧向风扰动和轮胎刚度摄动来初步验证控制器的鲁棒性.接着,在8DOF模型中进行高速直线行驶下抗侧向风稳定性仿真和2种不同附着路面下方向盘正弦输入仿真.车辆8DOF模型及参数见文献[12],为保证2种车辆模型在线性操纵区域具有相同车辆特性,取2DOF车辆模型与8DOF模型具有相同的整车质量、横摆转动惯量、前后桥到整车质心的距离以及轮胎侧偏角在-3°~3°之间的线性轮胎侧偏刚度.参数如表1所示. 表1 2DOF车辆模型参数4.1 2DOF模型车辆所受的外界干扰主要是侧向风,而对系统参数摄动影响最大的是轮胎侧偏刚度[7],因此将它们作为仿真的不确定输入.若只考虑以侧向风作为外界干扰输入时,即ΔA=ΔB=0,则侧向风可由下式简单描述:(20)式中,vw为风速;ρ为空气密度;Aw为汽车侧向迎风面积.若只考虑以前、后轮胎侧偏刚度变化作为系统参数摄动时,即Fw(t)=0,则系统摄动矩阵可由下式表述:式中,Δkf,Δkr分别为前、后轮侧偏刚度摄动量.仿真工况如下:忽略转向系统,将方向盘转角δs以16∶1的关系直接输入到理想前轮转角(δs=16δfd)进行角阶跃仿真;车速为20 m/s;在3 s时触发风压中心位于车辆质心后的侧向风输入,风速为10 m/s,2 s后停止;在7 s时触发轮胎侧偏刚度摄动(轮胎侧偏刚度降低20%),9 s后停止;在11 s时同时触发这2种输入,2 s后结束,仿真总时间为15 s.仿真结果如图1和图2所示.由图1和图2可看出,相对于无控制的传统前轮转向车辆(FWS),常规滑模控制的四轮转向(4WS-CSMC)和全滑模控制的四轮转向(4WS-TSMC)具有较小的质心侧偏角和横摆角速度波动.在3~5 s侧向风扰动期间,由于车速较低,2种控制下的车辆特性几乎没有差异;而在轮胎侧偏刚度摄动的情况下,基于常规滑模控制的四轮转向车辆具有非零的质心侧偏角跟踪误差和横摆角速度跟踪误差.对于全滑模控制,虽然在干扰突然介入时跟踪有点超调,但在较短时间后,质心侧偏角跟踪误差便变为零,横摆角速度跟踪误差也变为零,即全滑模控制器迅速对系统突然出现的不确定因素进行干预,使车辆快速地恢复到理想的转向特性.在外界干扰存在的情况下,车辆能很好地跟踪理想的转向特性,并且保证稳态跟踪误差为零,体现了全滑模控制器良好的控制性能和鲁棒性.这一响应特性正是由于在设计滑模面时考虑了跟踪误差积分项.由于线性的2DOF车辆没有考虑车辆以及轮胎的非线性因素,下面以非线性8DOF模型作进一步仿真分析.图1 质心侧偏角响应(阶跃转向,u=20 m/s,δs=48°)图2 横摆角速度响应(阶跃转向,u=20 m/s,δs=48°)4.2 8DOF模型非线性8DOF车辆模型能更精确地预测车辆的响应特性[12].不同于2DOF车辆模型,侧向风作用力和力矩将不能通过匹配条件与控制量一起输入到车辆模型中,而只能将其添加到车辆的侧向运动方程和横摆运动方程中.同样,轮胎侧偏刚度的摄动将由不同的路面摩擦系数来实现.分2种工况进行仿真分析:①车辆高速直线行驶时抗侧向风稳定性仿真;②车辆在2种不同附着路面下的方向盘正弦输入仿真.高速直线行驶时抗侧向风稳定性仿真设置初始车速为40 m/s,侧向风速为20 m/s,方向盘固定不动,1 s后触发侧向风输入,仿真总时间为10 s.仿真结果如图3所示.由图3可见,相比于无控制的前轮转向车辆,2种控制下的四轮转向车辆都有较小的侧向偏移.对比2种控制下的车辆轨迹,起初全滑模控制的车辆侧向偏移略大,随着质心侧角和横摆角速度迅速收敛到零后,它所产生的侧向偏移将小于基于常规滑模控制的车辆侧向偏移,可见稳态下侧向风干扰一直存在,采用误差积分形式的全滑模控制要好于常规的滑模控制,能更有效地减小车辆侧移,提高其抗侧向风的稳定性.图3 车辆行驶轨迹(侧风扰动,u=40 m/s, vw=20 m/s)接下来进行2种不同路面摩擦系数下的正弦输入仿真.设置方向盘输入的频率为2 rad/s,幅值为48°;2种路面摩擦系数μ分别为0.8和0.3;仿真车速设置为20 m/s.图4和图5是路面摩擦系数为0.8时的仿真结果,图6~图8是路面摩擦系数为0.3时的仿真结果.图4 车辆行驶轨迹(正弦转向,u=20 m/s, μ=0.8)图5 质心侧偏角响应(正弦转向,u=20 m/s, μ=0.8)图6 车辆行驶轨迹(正弦转向,u=20 m/s, μ=0.3)图4显示了在摩擦系数为0.8(干水泥路面)的路面上,无控制和有控制的车辆轨迹几乎一致,但图5表明无控制下的车辆质心侧偏角最大幅度为1.8°,与理想的零值存在较大的偏差,而有控制的车辆基本上保证车辆质心侧偏角为零,从而保证了车辆轴线方向与行驶方向一致,使车辆具有很好的操纵性.对比2种控制下的车辆响应几乎不存在差异.图7 质心侧偏角响应(正弦转向,u=20 m/s, μ=0.3)图8 右后轮转角输出(正弦转向,u=20 m/s, μ=0.3)当路面摩擦系数为0.3(湿路面)时,从图6中可看出无控制的车辆已经出现严重侧滑,失去稳定性;对于有控制的车辆,虽然未出现严重侧滑,但与理想的轨迹相差较远,这主要是因为理想模型中未考虑轮胎侧向力饱和的限制.对比图6中2种控制下车辆轨迹和图7中质心侧偏角跟踪效果可见,全滑模控制略好于常规滑模控制.图8显示2种控制下的车辆右后轮转角在平滑度和幅度上都没有较大差异,且转角都小于3°,其他车轮转角输出也有相似特性,限于篇幅没有给出.总体来说,全滑模控制器的控制性能更接近理想的转向特性,好于常规滑模控制器.5 结语针对基于线控技术的四轮转向车辆,本文设计了一种全滑模控制器,以跟踪理想车辆模型的质心侧偏角和横摆角速度为目标,通过全滑模控制实现前后轮主动转向.车辆2DOF模型下包含侧向风振动及轮胎侧偏刚度摄动输入的阶跃仿真表明,带有跟踪误差积分项的全滑模控制可以有效地改善稳态跟踪误差不为零的现象.车辆非线性8DOF模型下高速直线行驶抗侧向风稳定性仿真和不同摩擦路面下的方向盘正弦输入仿真表明,全滑模控制器具有良好的鲁棒性和控制性能,有效提升了车辆的操纵稳定性.参考文献 (References)[1]喻凡,李道飞.车辆动力学集成控制综述[J]. 农业机械学报, 2008, 39(6): 1-7.Yu Fan, Li Daofei. Review on integrated vehicle dynamics control[J]. Transactions of the Chinese Society for Agricultural Machinery, 2008, 39(6): 1-7.(in Chinese)[2]于蕾艳, 林逸, 李玉芳. 汽车线控转向系统综述[J]. 农业装备与车辆工程, 2006, 174(1): 32-48.Yu Leiyan, Lin Yi, Li Yufang. Summarization of automobile steer-by-wire system[J]. Agricultural Equipment & Vehicle Engineering, 2006, 174(1): 32-48. (in Chinese)[3]Sato H, Hirota A, Yanagisawa H, et al. Dynamic characteristics of whole wheel steering vehicle with yaw velocity feedback rear wheelsteering[C]//Proceedings of IMechE. Nuneaton, England, 1983:147-156. [4]Nagai M, Ohki M. Theoretical study on active four-wheel steering system by virtual vehicle model following control[J]. International Journal of Vehicle Design, 1988, 10(1): 16-33.[5]Li Bin, Yu Fan. Optimal model following control of four-wheel active steering vehicle[C]//Proceedings of the 2009 IEEE International Conference on Information and Automation. Zhuhai, China, 2009: 881-886.[6]Marino R, Scalzi S, Cinili F. Nonlinear PI front and rear steering control in four wheel steering vehicles[J]. Vehicle System Dynamics, 2007,45(12):1149-1168.[7]Akar M, Kalkkuhl J C. Lateral dynamics emulation via a four-wheel steering vehicle[J]. Vehicle System Dynamics, 2008, 46(9): 803-829.[8]Toshihiro H, Osamu N, Hiromitsu K. Model-following sling mode control for active four-wheel steering vehicle[J]. JSAE Review, 2004, 25: 305-313.[9]陈建松, 陈南, 殷国栋, 等. 考虑非线性特征的4WS车辆滑模鲁棒稳定性控制[J]. 东南大学学报:自然科学版, 2010, 40(5): 969-972.Chen Jiansong, Chen Nan, Yin Guodong, et al. Sliding-mode robust control for 4WS vehicle based on non-linear characteristic[J]. Journal of Southeast University: Natural Science Edition, 2010, 40(5): 969-972. (in Chinese) [10]Alfi A, Farrokhi M. Hybrid state-feedback sliding-mode controller using fuzzy logic for four-wheel-steering vehicles[J]. Vehicle System Dynamics, 2009, 47(3): 265-284.[11]Wai R J, Lin Kuomin, Lin Chung-You. Total sliding-mode speed control of field-oriented induction motor servo drive[C]//2004 5th Asian Control Conference. Melbourne, Australia, 2004: 1354-1361.[12]Demerly J D, Kamal Y T. Non-linear analysis of vehicledynamics(NAVDyn): a reduced order model for vehicle handling analysis[C]//SAE 2000 Automotive Dynamics & Stability Conference. Troy, Michigan,USA,2000: 354-370.。