汽车主动悬架和四轮转向系统的综合控制
- 格式:pdf
- 大小:254.53 KB
- 文档页数:4
自从20世纪80年代以来,为了提高汽车性能,人们开发了各种各样的底盘主动控制系统。
这些系统按汽车运动方向可以分为3类:纵向的制动和驱动控制、横向的转向和横摆力矩控制以及垂直的悬架控制。
目前汽车底盘的电子控制系统几乎毫无例外地围绕某一功能来开发,并通过轮胎与地面间的接触力产生作用。
由于汽车各个方向的运动并非独立,而是相互联系,相互影响,因此具有以下特征: ( 1)各个控制系统的控制目标不一致,如主动悬架的主要控制目标是舒适性,四轮转向的主要控制目标是操纵稳定性,将两者集成时会由于控制目标不一致而冲突; ( 2)各个控制系统对执行器的控制存在干涉,如制动器同时受到驾驶员、防抱死系统ABS和电子稳定程序ESP 等的控制; (3)同一控制目制可以由多个控制系统完成,如转向时的操纵稳定性可以由主动前轮转向AFS、主动后轮转向ARS和ESP等来实现。
此外还存在基于反馈的控制存在时间和相位的滞后,系统的冗余度较大,尤其是传感器冗余。
底盘集成控制是当前底盘的研发热点,因为它有着传统控制无法比拟的优点,具体如下。
(1) 消除各系统间的冲突如四轮转向可以改变汽车的横向运动,同样通过制动力控制也可以改变汽车的横向运动,集成控制能实现两个系统各自以合适的幅度向同一个方向作用,消除可能存在的冲突。
(2) 改善车辆性能如在装有ABS的车辆上若安装形式为“高选择”,则在分离附着系数路面上会产生横摆力矩,导致车辆失稳;若安装形式为“低选择”,又没有充分利用路面附着系数,导致制动距离延长。
通过ABS和4WS的集成控制既能充分利用路面附着系数,缩短制动距离,又能保证车辆稳定性。
(3) 减少传感器很多控制系统所需要的传感器信号是相同的,可以通过集成实现传感器共享,还可以充分利用状态估计等方法来估计一些车辆的状态参数,减少传感器的数量,降低控制系统的成本。
(4) 降低系统复杂性。
随着底盘电控系统数量的不断增加,控制器、传感器和执行器都大大增多,造成电子线路复杂,布局混乱,成本上升,还造成检修和维护的困难。
汽车动力学综合控制四轮分布转向和四轮分布式牵引/制动系统在这篇文章中,车辆动态综合控制算法使用一个在线的非线性优化方法,提出了4轮分布式转向和4轮分布式牵引/制动系统。
这分派算法减少每个轮胎的工作负荷,都控制在一样的大小。
该递归算法的全局最优解收敛可以由凸面的延展性证明。
这意味着,车辆动力学极限性能,综合控制的理论得到澄清。
此外,这款车动力的4轮转向分布式和4轮分布式牵引控制效果/制动模拟证明是比较了各种制动器组合系统。
本文的目的是阐明车辆动力学理论极限的性能和牵引转向/制动系统集成控制。
这对改善车辆极限性能,估计轮胎特性是很重要的。
自动回正力矩(SAT)的特点,具有低饱和转向侧向加速度运动的侧向力比多。
因此,发展了轮胎的特征估计算法,即每个车轮摩擦圈,使用SAT和侧向力之间的关系,1,2]。
虽然这些方法可以适用于纯侧向滑移运动,我们已明确用刷子模型[3,4]阐明了轮胎抓地力和SAT(综合考虑了横向和纵向滑移)的关系。
此外,还提出了轮胎抓地力(综合考虑了横向和纵向滑移)的估计模型。
Mokhiamar和Abe[6]提出了4轮分布式转向和4 轮分布式牵引/制动系统的汽车动力学综合控制算法,该算法减少了四轮工作负荷。
然而,算法没有考虑到关于约束每个轮胎摩擦圆,因此,该算法并不保证所有车轮的轮胎摩擦圈的力。
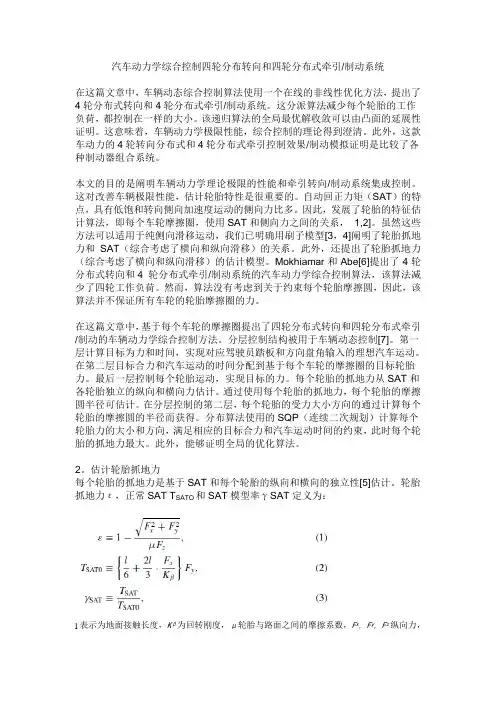
在这篇文章中,基于每个车轮的摩擦圈提出了四轮分布式转向和四轮分布式牵引/制动的车辆动力学综合控制方法。
分层控制结构被用于车辆动态控制[7]。
第一层计算目标为力和时间,实现对应驾驶员踏板和方向盘角输入的理想汽车运动。
在第二层目标合力和汽车运动的时间分配到基于每个车轮的摩擦圈的目标轮胎力。
最后一层控制每个轮胎运动,实现目标的力。
每个轮胎的抓地力从SAT和各轮胎独立的纵向和横向力估计。
通过使用每个轮胎的抓地力,每个轮胎的摩擦圆半径可估计。
在分层控制的第二层,每个轮胎的受力大小方向的通过计算每个轮胎的摩擦圆的半径而获得。
汽车底盘悬挂系统的主动与半主动控制汽车底盘悬挂系统是汽车重要的组成部分,负责支撑和缓解车身震动,保证车辆稳定性和乘坐舒适性。
随着科技的不断进步,汽车底盘悬挂系统的控制方式也在不断创新,主动和半主动控制成为了现代汽车悬挂系统的重要发展方向。
主动悬挂系统是指通过传感器实时监测路面情况和车辆动态,通过悬挂系统的控制单元主动调节悬挂刚度、减震力度等参数,以优化车辆的悬挂性能。
主动悬挂系统可以根据不同路况和行驶状态主动作出调整,提高车辆的操控性和舒适性。
采用主动悬挂系统的车辆可以更好地适应复杂路况,减少车身的侧倾和颠簸感,提升行驶平稳性。
主动悬挂系统的工作原理是利用电液控制技术,实现悬挂系统的快速响应和精准控制,从而提升车辆悬挂性能。
半主动悬挂系统是介于传统被动悬挂系统和主动悬挂系统之间的一种系统。
半主动悬挂系统同样可以根据路况和行驶状态调节悬挂参数,但是其调节范围和速度相对主动悬挂系统较小,无法实现完全主动的悬挂调节。
半主动悬挂系统采用电磁阻尼器、气压悬挂等技术,通过主动改变阻尼力和气压来调节悬挂刚度和减震效果,提高车辆悬挂性能。
半主动悬挂系统的优点在于成本较低、结构简单,对悬挂系统的改造和升级相对容易,因此在许多中高端车型中得到了广泛应用。
综上所述,主动和半主动悬挂系统在汽车底盘悬挂领域具有重要的应用前景。
随着汽车科技的不断发展,悬挂系统的控制技术将会越来越智能化和高效化,为驾驶员提供更加舒适和安全的驾驶体验,推动汽车行业向着智能化和高端化方向发展。
汽车底盘悬挂系统的主动与半主动控制必将成为未来汽车发展的一个重要趋势。
第29卷第6期 2006年6月合肥工业大学学报(自然科学版)J OU RNAL OF H EFEI UN IV ERSIT Y OF TECHNOLO GYVol.29No.6 J un.2006 收稿日期:2006202221作者简介:杨柳青(1971-),男,安徽巢湖人,合肥工业大学硕士生;陈无畏(1951-),男,湖南攸县人,博士,合肥工业大学教授,博士生导师.汽车主动悬架与ABS 系统联合控制研究杨柳青, 陈无畏, 初长宝(合肥工业大学机械与汽车工程学院,安徽合肥 230009)摘 要:文章建立了7自由度的半车模型、液压制动模型及白噪声路面模型,基于实用的PID 控制器,将汽车主动悬架与ABS 系统进行了联合控制。
悬架控制系统既以改善悬架性能为调节目标,又以车轮滑移率在最优时车轮法向反力达最优为调节目标;ABS 系统以车轮滑移率达最优,制动性能提高为调节目标。
仿真实验表明,在联合控制情况下,汽车悬架的性能指标、制动性能较之两系统单独控制的情况均有明显改善与提高。
关键词:主动悬架;防抱制动系统;联合控制;PID 控制器中图分类号:U463.33;U463.5;TP373.3 文献标识码:A 文章编号:100325060(2006)0620767205R esearch on the conjoint control of the vehicle ’s active suspension and anti 2lock braking systemYAN G Liu 2qing , C H EN Wu 2wei , C HU Chang 2bao(School of Machinery and Automobile Engineering ,Hefei University of Technology ,Hefei 230009,China )Abstract :In t he paper ,t he semi 2vehicle model of seven degrees of f reedom ,t he hydraulic braking model and t he white 2noise road surface model are founded ,and based on t he practical PID cont roller ,t he con 2joint co nt rol of t he vehicle ’s active 2suspension and anti 2lock braking system (ABS )is achieved.The adjusting of t he suspension cont rol system aims at imp roving suspension performance as well as get 2ting t he optimal normal counter force of t he wheel as t he sliding rate of t he wheel is at it s best.The adjusting of t he ABS aims at getting t he optimal sliding rate of t he wheel and advancing braking per 2formance.Simulation experiment s show t hat under t he conjoint cont rol ,bot h t he suspension perform 2ance indexes and t he braking performance of t he vehicle have evident improvement s in compariso n wit h t he single control of t he two systems.K ey w ords :active suspension ;anti 2lock braking sysgem ;conjoint cont rol ;PID conlroller0 引 言汽车由多个系统组成,而且各系统相互协作、相互影响,因而整车性能的提高依赖于各系统的协调工作。
车辆主动悬架系统控制方案设计车辆主动悬架系统是一种利用电子控制和传感器技术来调节车辆悬挂系统的功能。
通过检测车辆的动态状况和路况情况,主动悬架系统能够实时调节悬挂的刚度和阻尼,提升车辆的稳定性和行驶舒适性。
本文将针对车辆主动悬架系统的控制方案进行设计,共分为传感器模块、控制模块和执行模块三个部分。
传感器模块是主动悬架系统的基础,负责采集车辆的动态信息和路况情况。
常用的传感器包括加速度传感器、角度传感器、车速传感器和路况传感器等。
加速度传感器用于检测车辆的加速度和减速度,角度传感器用于检测车辆的倾斜角度,车速传感器用于检测车辆的速度,路况传感器用于检测路面的平整度和颠簸程度。
传感器采集到的数据需要经过滤波和处理后方能使用。
控制模块是主动悬架系统的核心,负责根据传感器模块采集到的数据,进行实时的控制和调节。
控制模块包括控制算法和控制器两部分。
控制算法通常采用PID控制算法,即比例、积分、微分控制算法。
PID控制算法能够根据车辆的动态状况和路况情况,计算出合适的悬挂刚度和阻尼,以提升车辆的稳定性和行驶舒适性。
控制器通常采用微控制器或程序控制器,用于控制悬挂系统的执行器。
执行模块是主动悬架系统的实施部分,负责根据控制模块的指令,实时地调节悬挂的刚度和阻尼。
执行模块包括悬挂系统的执行器和悬挂系统的控制阀。
悬挂系统的执行器通常为液压或电液混合执行器,用于实现悬挂系统的加压或减压。
悬挂系统的控制阀用于控制液压或电液混合执行器的操作,根据控制模块的指令,调节液压或电液混合执行器的工作状态。
在车辆主动悬架系统的控制方案设计中,传感器模块负责采集车辆的动态信息和路况情况,控制模块负责根据传感器模块采集到的数据,进行实时的控制和调节,执行模块负责根据控制模块的指令,实时地调节悬挂的刚度和阻尼。
三个模块之间需要进行信息的传递和交互,以实现整个系统的协调工作。
在实际应用中,车辆主动悬架系统的设计还需要考虑到成本、可靠性和安全性等因素。
汽车主动悬架系统及其控制方法汽车乘坐舒适性和操作安全性与汽车主动悬架关系紧密,主动悬架研究及其重要。
本文介绍了主动悬架的工作原理以及主动悬架的控制方法:天棚阻尼控制、最优控制、自适应控制、滑模变结构控制、模糊控制、神经网络控制等。
预测了主动悬架系统的发展和未来趋势。
标签:主动悬架;控制方法;汽车被动悬架通常由具有确定参数的弹性元件和阻尼元件等构成,对于路面的适应性能较差,对汽车改善舒适性等方面不利。
在被动悬架设计的过程中,往往不能使乘客的乘坐舒适性与车辆的操纵稳定性同时达到最优。
在很大程度上及一些因素的影响,我国的汽车很少采用主动悬架,因为在主动及半主动悬架研究方面,我国相对来说比较落后,就技术层面来讲,主动悬架相对于被动悬架在控制方面较为复杂,研究起来比较困难,对其进一步发展产生了阻碍。
1 汽车主动悬架的工作原理汽车主动悬架可以根据路面的实时状况来进行调节,相比于被动悬架其可以调节该悬架的刚度及阻尼,使悬架找到一个最优的状态来满足舒适性及操纵稳定性。
它是在被动悬架的基础上改进而来,增加用来控制调节力的装置,通过控制系统对传遞来的一系列信号进行反馈调节力的大小进而使悬架刚度及阻尼发生变化来使乘坐舒适性及操纵稳定性同时达到最优。
2 主动悬架系统的控制方法主动悬架的控制方法有很多种,在不同的控制方法中所运用的学科知识也不相同,涉及到多种理论的分析研究。
但是,各种控制方法均有自身的独特之处,对几种主动悬架的控制方法介绍如下。
2.1 天棚阻尼器控制天棚阻尼器控制的主要方法是通过一种对力的控制来实现其功能。
该力是由主动悬架发生并且需要与该车的车体的速度成正比例关系,由于在该系统中相比其他系统多了一个固定一端的阻尼器,来作为参考,这就是天棚阻尼控制系统的大致原理和名称由来。
在该控制方法中,控制力的大小是由车体的速度传递到到力传感器的大小决定的,传感器数量不多且结构也不算复杂,更不需要多学科的交叉研究,比较容易实现其功能且使用起来相对快速。
主动悬架控制方法悬架系统是汽车底盘的重要组成部分,其主要功能是减震和支撑车身,以提供舒适性和稳定性。
传统的悬架系统通常采用被动控制方式,即减震器根据车身运动来调节阻尼力。
然而,随着科技的进步,主动悬架控制方法逐渐受到关注和应用。
主动悬架控制方法通过传感器和执行器实时监测和调整悬架系统的工作状态,以提供更好的悬架性能和驾驶体验。
主动悬架控制方法的核心是实时监测车身姿态和路面信息,并根据这些信息调整悬架系统的工作状态。
为了实现这一目标,悬架系统通常配备多个传感器,如加速度计、倾斜传感器、行程传感器等,用于监测车身的加速度、倾斜角度、行程等参数。
这些传感器将采集到的数据传输给控制单元,控制单元根据预设的控制算法计算出相应的控制信号,并通过执行器来调整减震器的阻尼力或悬架系统的高度。
主动悬架控制方法可以根据车辆的运行状态和路面的不同情况来调整悬架系统的工作状态。
例如,在高速行驶时,为了提供更好的稳定性和操控性,控制单元可以增加减震器的阻尼力,降低车身的倾斜角度。
而在通过颠簸路面时,控制单元可以减小减震器的阻尼力,提高悬架系统的行程,以提供更好的舒适性和减震效果。
此外,主动悬架控制方法还可以根据驾驶者的需求进行个性化调节,提供不同的驾驶模式选择,如舒适模式、运动模式等。
主动悬架控制方法的应用可以带来多种好处。
首先,它可以提供更好的悬架性能和驾驶体验。
通过实时调整悬架系统的工作状态,主动悬架控制方法可以使车辆更加稳定、舒适和操控性更好。
其次,它可以提高车辆的安全性。
通过根据路面情况调整悬架系统的工作状态,主动悬架控制方法可以减少因颠簸路面或急转弯等情况造成的车辆失控风险。
最后,它可以提高燃油经济性。
通过优化悬架系统的工作状态,主动悬架控制方法可以减少车辆的能耗,提高燃油经济性。
虽然主动悬架控制方法在提供悬架性能和驾驶体验方面具有显著优势,但也存在一些挑战和限制。
首先,主动悬架控制方法的成本较高。
相比传统的被动悬架系统,主动悬架控制方法需要更多的传感器和执行器,并且需要复杂的控制算法和计算单元,导致成本上升。
汽车主动悬架与转向系统的集成控制邹 庆,常玉林(江苏大学汽车与交通工程学院,江苏镇江 212013)摘要:在建立了汽车主动悬架与转向系统集成控制模型的基础上,应用LQG 控制理论,设计了汽车主动悬架与转向系统L QG 集成控制器,并进行了试验仿真,实现了对质心侧偏角、车身横摆角速度、车身垂直加速度、车身俯仰角的集成控制。
与被动悬架和转向系统、主动悬架与转向系统单独控制相比,汽车的平顺性、操纵稳定性和安全性都有了显著改善,为汽车底盘集成控制研究提供了依据。
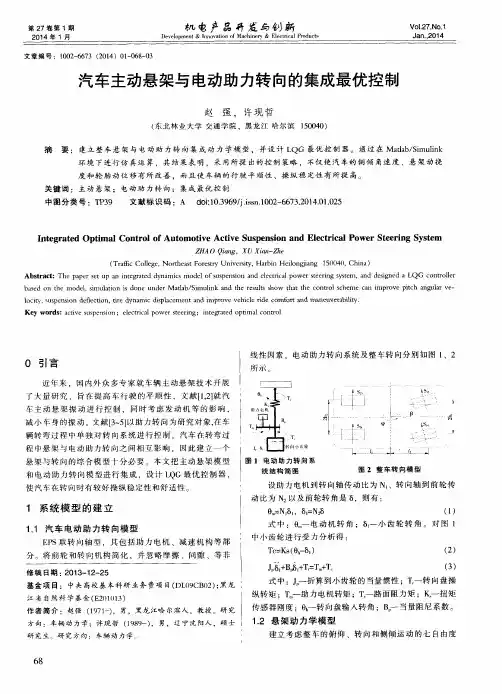
关键词:主动悬架;转向系统;LQG 控制;集成控制中图分类号:U 463.33;U463.4 文献标识码:A 文章编号:1006-0006(2008)01-0056-03Integrated Con tro l o f V eh icl e A cti ve Suspensi on and S teeri ng Sy st e mZOU Q i n g,C HANG Yu-lin(Schoo l of A uto m otive and T ra ffic Eng i neer i ng ,Jiangsu U n i ve rsity ,Zhenji ang 212013,Ch i na)Abstr ac:t T his paper establi shed the i ntegrated contro l m odel o f veh icle active suspension and stee ri ng syste m,adopted LQG contro l t heory ,desi gned the LQG i nteg rated contro ller of veh i c l e ac ti ve suspensi on and steeri ng sy stem and s i m u l a ted the contro ller ,realized the i ntegrated contro l o f veh i c l e sli p ,y a w ve l o city ,bounc i ng acce l e ration and pitching ve l oc ity .Co m pared to t he passi ve suspensi on and steer i ng system and to t he acti ve suspensi on and steer i ng sy stem contro l i ndependentl y ,the perfo r mance o f steer s m ooth ,contro l stabilization and security are a ll disti nct i m proved .Prov i ded the proof to the study o f veh icle chass i s i ntegrated contro.lKey wor ds :A cti ve suspension ;S teeri ng sy stem ;LQG contro ;l Integrated contro l 随着现代汽车技术的迅速发展,人们对汽车的行驶平顺性和操纵稳定性的要求也越来越高。
汽车主动悬架和四轮转向系统的综合控制
来飞;邓兆祥;董红亮;张立双
【期刊名称】《振动与冲击》
【年(卷),期】2009(028)004
【摘要】针对汽车底盘的两大重要组成-转向子系统和悬架子系统,建立起汽车侧向动力学模型、悬架动力学子模型以及考虑两者耦合效应的综合动力学模型;接着对四种不同控制策略的车辆系统进行了仿真对比,包括被动悬架兼前轮转向系统、主动抗侧倾杆控制系统、主动抗侧倾杆和四轮转向控制系统以及主动悬架与四轮转向的综合控制系统,得出:主动悬架和四轮转向综合控制系统能同时兼顾主动悬架和四轮转向的优点,使车辆的操稳性和平顺性大大提高.
【总页数】4页(P157-160)
【作者】来飞;邓兆祥;董红亮;张立双
【作者单位】重庆大学,机械传动国家重点实验室,重庆,400030;重庆市汽车NVH 工程中心;重庆大学,机械传动国家重点实验室,重庆,400030;重庆市汽车NVH工程中心;重庆大学,机械传动国家重点实验室,重庆,400030;重庆市汽车NVH工程中心;重庆大学,机械传动国家重点实验室,重庆,400030;重庆市汽车NVH工程中心【正文语种】中文
【中图分类】U463.1
【相关文献】
1.汽车主动悬架和四轮转向系统的耦合分析及协调控制 [J], 来飞;邓兆祥;董红亮
2.基于汽车电子控制技术的四轮转向系统 [J], 陈猛
3.Adaline神经网络在四轮转向汽车控制系统中的应用 [J], 王磊
4.四轮转向与主动悬架系统集成控制研究 [J], 夏长高;杨锡鹤
5.基于预测控制的汽车主动悬架与电控液压助力转向系统的集成控制 [J], 高翔;缪丰隆
因版权原因,仅展示原文概要,查看原文内容请购买。