半波傅氏算法及其改进算法的实现
- 格式:doc
- 大小:132.50 KB
- 文档页数:12
1、继电保护的基本任务是什么?自动迅速有选择性的将故障元件从电力系统中切除,使故障元件免于继续遭到破坏,保证故障部分迅速恢复正常运行。
反应电器元件不正常运行状态,并根据运行维护条件而动作于发出信号或跳闸。
2、电力系统对继电保护的四个基本要求是什么?分别对这四个基本要求进行解释?正确理解”四性”的统一性和矛盾性.选择性:电力系统发生故障时,保护装饰仅将故障元件切除,而使非故障元件仍能正常运行,以尽量缩小停电范围。
速动性:尽可能快地切除故障灵敏性:在规定的保护范围内,对故障情况的反应能力。
满足灵敏性要求的保护装置应在区内故障时,不论短路点的位置与短路的类型如何,都能灵敏的正确的反映出来。
可靠性:保护装置规定的保护范围内发生了应该动作的故障时,应可靠动作,即不发生拒动;而在其他不改动作的情况下,应可靠不动作,即不发生误动作。
继电保护的科学研究设计制造和运行的绝大部分工作是围绕着如何处理好这四个基本要求之间的辩证统一关系而进行的。
3、继电保护装置的组成包括那几个部分?各部分的功能是什么?测量部分:测量从被保护对象输入的有关电气量进行计算,并与已给定的整定值进行比较,根据比较的结果,给出“是”“非”“大于”“不大于”等于“0”或“1”性质的一组逻辑符号,从而判断保护是否该启动。
逻辑部分:根据测量部分各输出量大小,性质,输出的状态,出现的顺序或其组合,使保护装置按一定的逻辑关系工作,最后确定时候应该使断路器跳闸货发出信号,并将有关命令传给执行部分。
执行部分:根据逻辑部分输出的信号,完成保护装置所担负的任务,如被保护对象故障时,动作与跳闸,不正常运行时,发出信号,正常运行时,不动作等。
4、何谓主保护、后备保护和辅助保护?远后备和近后备保护有何区别?各有何优、缺点?主保护:反映被保护元件本身的故障,并以尽可能短的时限切除故障的保护。
后备保护:主保护或断路器拒动时用来切除故障的保护,又分为近后备保护和远后备保护。
2008级《电力系统继电保护原理》考试题型及复习题第一部分:考试题型分布(1)单选题(10分):1分×10题(2)多选题(10分):2分×5题(3)简答题(25分):5分×5题(4)分析题(20分):3题(5)计算题(35分):3题。
第二部分:各章复习题第一章1.继电保护装置的基本任务是什么?P12.试述对继电保护的四个基本要求的内容。
P4-P5(除了知道保护四性及其含义,更应该能够理解并运用,如懂得对某故障对某保护引起的保护起动、返回或动作进行四性的评价。
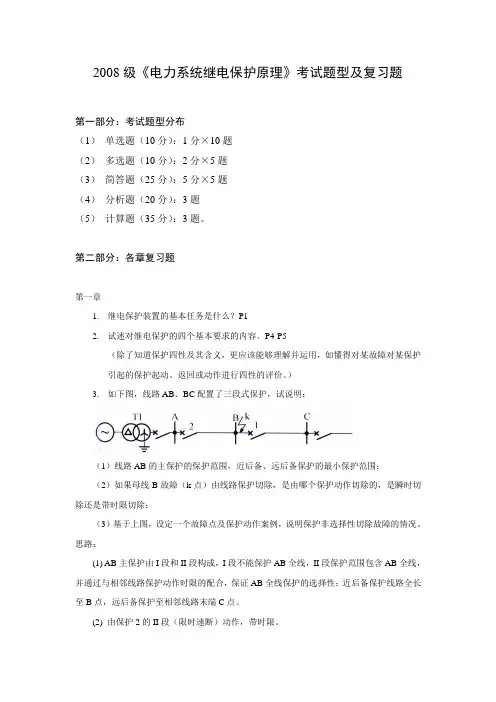
)3.如下图,线路AB、BC配置了三段式保护,试说明:(1)线路AB的主保护的保护范围,近后备、远后备保护的最小保护范围;(2)如果母线B故障(k点)由线路保护切除,是由哪个保护动作切除的,是瞬时切除还是带时限切除;(3)基于上图,设定一个故障点及保护动作案例,说明保护非选择性切除故障的情况。
思路:(1) AB主保护由I段和II段构成,I段不能保护AB全线,II段保护范围包含AB全线,并通过与相邻线路保护动作时限的配合,保证AB全线保护的选择性;近后备保护线路全长至B点,远后备保护至相邻线路末端C点。
(2) 由保护2的II段(限时速断)动作,带时限。
(3) 故障点k ’设在BC 线,当k ’故障,而保护1保护拒动或断路器失灵,则保护2的III 段经延时动作与断路器2。
第二章1. 什么是继电器的返回系数?返回系数都是小于1的吗?P12返回电流/动作电流;过电流继电器的返回系数恒小于1。
2. 举例说明哪些继电器是过量动作的,哪些继电器是欠量动作的?过电流继电器;低电压继电器;阻抗继电器3. 微机保护装置硬件系统由哪五部分组成?分别起什么作用?P164. 微机保护的软件一般由哪些功能模块构成?监视程序,运行程序(主程序,中断服务程序)5. 如何选择微机保护的采样率?说明低通滤波器设计与采样率选择之间的关系。
P18第三章1. 试对保护1进行电流Ⅰ、Ⅱ、Ⅲ段的整定计算(线路阻抗0.4Ω/km ,电流Ⅰ、Ⅱ、Ⅲ段的可靠系数分别是1.3、1.1、1.2,返回系数0.85,自起动系数1。
FFT算法详解FFT (Fast Fourier Transform) 是一种高效的离散傅里叶变换算法,用于将时域信号转换为频域信号。
它在信号处理、图像处理、通信领域等具有广泛的应用。
本文将详细介绍FFT算法的原理和实现。
一、傅里叶变换的基本原理傅里叶变换是一种将信号从时域转换到频域的方法。
它将时域信号分解成多个不同频率的正弦和余弦函数的叠加。
傅里叶变换的基本公式为:F(k) = Σ_{n=0}^{N-1} f(n)e^{-2πikn/N}其中,F(k)是频域信号的复数表示,f(n)是时域信号的复数表示,N是信号长度,k是频率。
二、傅里叶变换的问题传统的傅里叶变换算法的时间复杂度为O(N^2),计算量较大,不适用于实时处理大型信号。
FFT算法通过分治的思想,将DFT(Digital Fourier Transform)问题转化为多个子问题,从而降低了计算复杂度。
三、蝶形运算蝶形运算的公式为:y_0=x_0+W_N^k*x_1y_1=x_0-W_N^k*x_1其中,x_0、x_1是输入,y_0、y_1是输出,W_N^k是旋转因子,N是信号长度,k是频率。
四、FFT算法的步骤1.将输入信号分成偶数下标和奇数下标的两个子序列。
2.对两个子序列分别进行FFT变换,得到两个子序列的频域表示。
3.将两个子序列的频域表示合并成完整的频域信号。
4.重复上述步骤,直到得到最终的频域信号。
五、FFT算法的实现1.初始化输入信号和旋转因子。
2.将输入信号按照偶数下标和奇数下标分成两个子序列。
3.对两个子序列分别进行FFT变换,递归调用FFT函数。
4.将两个子序列的频域表示合并成完整的频域信号。
5.返回最终的频域信号。
总结:FFT算法是一种高效的离散傅里叶变换算法,通过分治的思想将DFT问题分解为多个子问题,从而降低了计算复杂度。
它在信号处理、图像处理、通信领域等有着广泛的应用。
掌握FFT算法的原理和实现对于理解信号处理技术和提高算法效率具有重要意义。
FFT 及其Python实现方法FFT 及其Python实现方法快速傅里叶变换(Fast Fourier Transform,FFT)是一种高效的计算傅里叶变换的算法,广泛应用于信号处理、图像处理、数字滤波等领域。
本文将介绍FFT 的原理及其在Python中的实现方法,以帮助读者更好地理解和应用FFT算法。
一、傅里叶变换简介傅里叶变换是一种将信号从时域转换到频域的数学变换方法,通过将信号分解成不同频率的正弦波和余弦波的和来描述信号的频谱特性。
傅里叶变换的公式为:其中,X(k)表示频域的系数,x(n)表示时域的信号,N表示信号的长度。
二、FFT算法原理FFT算法是一种高效的计算傅里叶变换的算法,其基本思想是将一个N点的DFT(离散傅里叶变换)分解成多个较小规模DFT的和,从而降低计算复杂度。
FFT算法的核心是蝶形运算,通过将原始序列分成两部分,分别进行计算后再合并,从而实现快速的傅里叶变换。
三、Python库介绍在Python中,我们可以使用NumPy库来实现FFT。
NumPy是一个科学计算的基础库,提供了丰富的数学函数和数组操作工具,可以方便地进行FFT 计算。
四、FFT的Python实现步骤导入必要的库在使用NumPy实现FFT之前,我们需要导入相应的库,并加载我们要处理的信号。
以下是导入库和加载信号的示例代码:import numpy as npimport matplotlib.pyplot as plt# 加载示例信号t = np.arange(0, 1, 0.01)signal = np.sin(2 * np.pi * 5 * t) + np.sin(2 * np.pi * 10 * t) + np.random.randn(len(t))进行FFT计算在Python中,我们可以使用NumPy库中的numpy.fft.fft函数来实现FFT 计算。
以下是一个进行FFT计算的示例代码:# 进行FFT计算fft_result = np.fft.fft(signal)使用np.fft.fft函数,我们将信号作为输入,得到其FFT计算的结果。
fft提高运算速度的方法傅里叶变换(FFT)是一种在信号处理和图像处理中广泛使用的算法,用于将一个函数表示为一组正弦和余弦函数的加权和。
它被广泛应用于数字信号处理、图像处理、频谱分析以及一些其他的科学和工程领域。
FFT算法的一个主要优势是它能够显著提高计算速度,但要想充分发挥其优势,需要考虑一些优化方法。
在下面的文章中,我将介绍几种常见的FFT提高运算速度的方法。
1. 使用快速傅里叶变换(Fast Fourier Transform)算法:FFT算法是一种基于分治法的算法,可以将傅里叶变换的计算复杂度从O(n^2)降低到O(nlogn)。
常用的快速傅里叶变换算法包括Cooley-Tukey算法、Rader算法等。
2.选择合适的采样率:采样率是指每秒内对信号进行采样的次数。
选择合适的采样率可以在降低计算复杂度的同时保留足够的频谱信息。
一般情况下,采样率应大于信号中最高频率的两倍。
3.使用递归算法:FFT算法可以使用递归的方式实现,这种方法的优势在于它能够降低内存占用和计算复杂度,但在实际应用中需要注意内存溢出的问题。
4.利用对称性和周期性:对于一些具有对称性或周期性的信号,可以利用这些性质来减少计算量。
例如,对于实数序列的FFT计算,可以利用FFT的对称性来减少计算量。
5.使用位逆序:快速傅里叶变换算法通常要求输入序列的长度是2的整数次幂。
如果输入序列的长度不是2的整数次幂,可以通过将输入序列重新排列成位逆序的形式来减少计算量。
6.并行计算:FFT算法中的许多计算步骤是可以并行计算的,因此可以利用多核处理器或分布式计算环境来加速计算。
7.使用FFT库:许多编程语言和计算平台都提供了专门用于计算FFT 的库函数。
这些库函数通常会对FFT算法进行了优化,使用它们可以充分发挥硬件平台的优势。
总之,FFT算法是一种非常重要且广泛应用的算法,通过采用适当的优化方法,可以显著提高FFT的计算速度。
上述提到的方法只是其中的一部分,实际应用中还可以根据具体情况进行更多的优化。
新手小白一看就会FFT算法的原理详解傅里叶变换(Fourier Transform)是一种用于信号分析和图像处理的重要数学方法,它基于信号可以用一组正弦和余弦函数加权和表示的基本原理。
傅里叶变换主要通过将一个信号从时域变换到频域,实现信号的频谱分析和频域处理。
而快速傅里叶变换(Fast Fourier Transform,FFT)则是一种高效实现傅里叶变换的算法。
FFT算法的核心思想是分治策略,即将一个规模为N的问题分解为若干规模为N/2的子问题。
FFT算法借鉴了分治算法的优点,使得傅里叶变换的计算时间复杂度从O(N^2)下降到了O(NlogN),大大提高了计算效率。
下面将详细介绍FFT算法的原理。
首先,考虑需要进行傅里叶变换的一个离散的序列f(x),其中x为序列的下标。
这个序列可以看作是一个多项式的系数,傅里叶变换的目的是求得该多项式的根。
FFT算法的基本思路是将这个多项式分解为奇次和偶次项两个多项式的和,并分别对其进行傅里叶变换。
然后再将变换后的结果合并为最终的结果。
设序列f(x)的长度为N,可以将其分为两部分:f_e(x)=f(2x),其中x为偶数f_o(x)=f(2x+1),其中x为奇数那么f(x)可以表示为f_e(x^2)+f_o(x^2)*x对序列f_e(x)和f_o(x)分别进行N/2点的傅里叶变换,得到变换后的序列F_e(x)和F_o(x)。
接下来将F_e(x)和F_o(x)合并为最终的结果F(x)。
根据频域上两个序列的关系可知:F(x)=F_e(x)+W_N^x*F_o(x)其中W_N^x表示复数的单位根,即在单位圆上的第x个点。
根据Euler公式可知 W_N = exp(-2πi/N),则 W_N^x = exp(-2πi/N)^x,在计算机中可以通过查表或者递推的方式计算出。
最后,递归地将N个点的傅里叶变换转化为两个N/2个点的傅里叶变换,并利用合并的方式得到最终的结果。
总体而言,FFT算法可以通过递归的方式将一个长度为N的序列的傅里叶变换转化为两个长度为N/2的序列的傅里叶变换,并通过合并得到最终结果。
按时间抽取的基2FFT算法分析及MATLAB实现基2FFT算法是一种快速傅里叶变换(Fast Fourier Transform,FFT)的算法,在信号处理、图像处理等领域有着广泛的应用。
该算法通过将N个输入值分解成两个长度为N/2的DFT(离散傅里叶变换)来实现快速的计算。
本文将对基2FFT算法进行分析,并给出MATLAB实现。
基2FFT算法的主要思路是将输入序列分解成奇偶两个子序列,然后分别对这两个子序列进行计算。
具体步骤如下:1.将输入序列拆分成奇数位和偶数位两个子序列。
比如序列x[0],x[1],x[2],x[3]可以拆分成x[0],x[2]和x[1],x[3]两个子序列。
2. 对两个子序列分别进行DFT计算。
DFT的定义为:X[k] = Σ(x[n] * exp(-i * 2π * k * n / N)),其中k为频率的索引,N为序列长度。
3.对得到的两个DFT结果分别进行合并。
将奇数位子序列的DFT结果和偶数位子序列的DFT结果合并成一个长度为N的DFT结果。
4.重复以上步骤,直到计算结束。
基2FFT算法的时间复杂度为O(NlogN),远远小于直接计算DFT的时间复杂度O(N^2)。
这是因为基2FFT算法将问题的规模逐步减半,从而实现了快速的计算。
下面是MATLAB中基2FFT算法的简单实现:```matlabfunction X = myFFT(x)N = length(x);if N == 1X=x;%递归结束条件return;endeven = myFFT(x(1:2:N)); % 偶数位子序列的FFT计算odd = myFFT(x(2:2:N)); % 奇数位子序列的FFT计算W = exp(-1i * 2 * pi / N * (0:N/2-1)); % 蝶形因子temp = W .* odd; % 奇数位子序列的DFT结果乘以蝶形因子X = [even + temp, even - temp]; % 合并得到一个长度为N的DFT结果end```上述代码中,函数myFFT为基2FFT算法的MATLAB实现。
8点基于DIT的FFT的实现离散傅立叶变换(Discrete Fourier Transform,DFT)是一种非常重要的数字信号处理技术,它在频域中将时域信号转换为频域信号。
傅立叶变换的一种高效实现是快速傅立叶变换(Fast Fourier Transform,FFT),它是一种基于迭代的算法,具有较低的计算复杂度。
在本文中,我们将介绍DIT(Decimation In Time)算法的FFT实现,它是一种经典的FFT实现方法。
DIT算法是基于分治原则的一种FFT算法,它将一个N点的DFT拆分成两个N/2点的DFT,并通过迭代的方式进行计算。
DIT算法的核心思想是将输入序列分成奇数索引和偶数索引两部分,然后对它们分别进行N/2点的DFT计算。
最后将得到的结果进行组合,得到最终的N点DFT。
下面是DIT算法的具体步骤:1. 将输入序列划分为奇数索引和偶数索引两个部分。
假设输入序列为x[0], x[1], ..., x[N-1],则分别得到奇数索引部分x_odd[0],x_odd[1], ..., x_odd[N/2-1]和偶数索引部分x_even[0],x_even[1], ..., x_even[N/2-1]。
2. 对奇数索引部分x_odd进行N/2点的DFT计算。
使用递归调用FFT算法计算得到奇数索引部分的频域序列X_odd[0], X_odd[1], ..., X_odd[N/2-1]。
3. 对偶数索引部分x_even进行N/2点的DFT计算。
使用递归调用FFT算法计算得到偶数索引部分的频域序列X_even[0], X_even[1], ..., X_even[N/2-1]。
4. 根据蝴蝶运算(Butterfly Operation)的原理,将得到的X_odd 和X_even合并成N个频域样本。
具体操作是,对于每个k=0, 1, ..., N/2-1,计算X[k] = X_odd[k] * W^k + X_even[k]其中W是复数旋转因子,计算公式为W=e^(-j2π/N)。
微机继电保护傅立叶算法研究张迪,王维庆新疆大学电气工程学院, 乌鲁木齐(830008)E-mail:zhangdi2434@摘要:全波傅里叶算法可以计算信号谐波分量,半波傅里叶算法把运算的数据窗减少了一半,运算量比全波算法减少,但二者都会受到衰减直流分量的影响。
本文在传统傅里叶算法的的基础上,每次求和时把衰减直流分量减去,从而去除了衰减直流分量的影响。
不论全波还是半波,相角都不能直接算出,需要对计算出的值修正后才能得到正确结果。
此外联合Matlab 和Visual Basic 可以方便的对算法仿真。
关键词:全波傅里叶算法,半波傅里叶算法,衰减直流分量,1.引言全波傅里叶算法以傅里叶级数为基础,可以准确计算出故障函数中的各次谐波,但是传统算法有两个明显缺点。
(1)衰减直流分量的影响。
(2)相角如果直接套用公式,结果错误。
针对这两大缺点,本文提出两种不同的解决方法。
第一,滤去衰减直流分量。
挑出故障函数的三个周期的最大值和最小值(共六个),用三个最大值计算出上包罗曲线的三个参数A,B,C,从而得到上包罗曲线函数,同理也可以利用最小值算出下包罗曲线,再把A,B,C 同a, b, c 相加求和除以二,就得到了衰减直流分量的三个参数,就相当于得到衰减直流分量函数。
那么在用傅里叶算法求和时从y 中把衰减直流分量减掉,就可以达到将其滤掉的目的。
通过Matlab 的仿真结果来看,滤波效果还是很明显的。
第二,相角的问题,直接套公式的结果绝大部分是错的,所以把期望值和计算值在-2π到2π做了比较,通过曲线发现其中有一定规律性,按照他的差值规律,将计算值同期望值作拟合,最后得到很好的拟合结果,通过仿真结果可以看出。
传统半波傅立叶算法也有以上的两个缺点,虽然计算时间短于全波,但是以不能计算偶次谐波的幅值为代价。
用Matlab 编程时为了很直观的看出计算结果和仿真图形,参考利用VB 和Matlab 混合编程的文章之后,本文选取了一种通用的方法,即把Matlab 作为VB 的一个ActiveX 控件加入到VB 中,实现在VB 中调用Matlab,使用VB 界面录入数据,后台计算交给Matlab,主要实现对全波和半波的图形仿真比较,体现各自算法的特点。
半波整流有效值计算半波整流是一种常见的电子电路,用于将交流电信号转换为直流电信号。
在这篇文章中,我们将详细介绍半波整流的原理、有效值计算方法以及其在实际应用中的指导意义。
首先,让我们来了解什么是半波整流。
半波整流电路由一个二极管、一个负载电阻和一个交流电源组成。
当交流电信号作用在二极管上时,二极管会将正半周期的电流通过,而阻断负半周期的电流。
这样,交流电信号就被转化为了具有同频率但是只包含正半周期的直流电信号。
半波整流电路的有效值计算是衡量电路输出功率大小的重要指标。
有效值是指交流电信号在同等功率下所产生的热效应相当于直流电信号所需的功率。
对于半波整流电路,有效值的计算方法可以通过以下步骤进行:1. 首先,我们需要知道交流电信号的峰值电压值,通常用Vp表示。
2. 接下来,我们可以通过公式Vrms = Vp / √2来计算交流电信号的均方根值,也就是有效值。
3. 最后,我们可以将这个有效值与所需的负载电阻值结合起来,使用公式P = Vrms^2 / R来计算输出功率。
在实际应用中,半波整流电路有着广泛的用途。
例如,在电源适配器中,半波整流电路可以将交流电转换为直流电,为电子设备提供稳定的电源。
在通信领域,半波整流电路常用于调制解调器中,将接收到的信号转化为可供处理的直流电信号。
此外,在音频放大器中,半波整流电路可以对音频信号进行整形,减小噪音干扰,提高音质。
总结起来,半波整流电路是一种常见且实用的电子电路,在许多领域中都有着广泛的应用。
了解半波整流的原理和有效值计算方法,可以帮助我们更好地理解和设计电路,提高电路的效率和性能。
无论是在学习电子电路原理还是在实际应用中,这种知识都具有重要的指导意义。
傅里叶滤波器算法是一种在傅里叶变换基础上进行的信号处理方法。
它通过将信号从时域转换到频域,然后对频域的信号进行滤波处理,最后再将滤波后的信号转换回时域,以达到对信号的滤波效果。
傅里叶变换是一种将时间序列数据转换为频率域的数学方法,通过将时间序列数据转换为复数形式,可以在频率域中对数据进行滤波处理。
在傅里叶滤波器算法中,通常会使用离散傅里叶变换(DFT)或快速傅里叶变换(FFT)算法来进行傅里叶变换和反变换操作。
在傅里叶滤波器算法中,需要设置一个滤波器,该滤波器可以控制信号的频率响应,使得某些频率成分的信号被增强或抑制。
通过设置不同的滤波器参数,可以实现不同的滤波效果。
需要注意的是,傅里叶滤波器算法是一种线性滤波器,对于非线性的信号处理效果可能不太理想。
此外,傅里叶滤波器算法也存在一些局限性,例如在处理具有复杂频率成分的信号时可能会出现问题。
因此,在实际应用中需要根据具体的需求和场景选择合适的滤波器算法。
适用标准文案重新到尾完全理解傅里叶变换算法、上序言第一部分、DFT第一章、傅立叶变换的由来第二章、实数形式失散傅立叶变换(Real DFT )重新到尾完全理解傅里叶变换算法、下第三章、复数第四章、复数形式失散傅立叶变换/***************************************************************************************************/这一片的傅里叶变换算法,解说透辟,希望对大家会有所帮助。
感谢原作者们(July 、dznlong )的精心编写。
/**************************************************************************************************/序言:“对于傅立叶变换,不论是书籍还是在网上能够很简单找到对于傅立叶变换的描绘,可是大都是些弄虚作假的文章,太甚抽象,尽是一些让人看了就望而却步的公式的排列,让人很难能够从感性上获得理解” ---dznlong,那么,究竟什么是傅里叶变换算法列?傅里叶变换所波及到的公式详细有多复杂列?傅里叶变换( Fourier transform)是一种线性的积分变换。
因其基本思想第一由法国学者傅里叶系统地提出,因此以其名字来命名以示纪念。
哦,傅里叶变换本来就是一种变换而已,不过这类变换是从时间变换为频次的变化。
这下,你就知道了,傅里叶就是一种变换,一种什么变换列?就是一种从时间到频次的变化或其相互转变。
ok ,我们再来整体认识下傅里叶变换,让各位对其有个整体大体的印象,也趁便看看傅里叶变换所波及到的公式,终究有多复杂:以下就是傅里叶变换的 4 种变体(摘自,维基百科)连续傅里叶变换一般状况下,若“傅里叶变换”一词不加任何限制语,则指的是“连续傅里叶变换”。
连续傅里叶变换将平方可积的函数 f (t )表示成复指数函数的积分或级数形式。
目录
第一章半波傅氏算法 (1)
第二章半波傅氏算法的误差分析 (3)
第三章滤除衰减非周期分量的新算法 (4)
第四章仿真计算 (7)
第五章结论 (9)
参考文献 (10)
半周傅氏算法及其改进算法的实现
摘要
提出一种利用半波傅氏算法消除衰减非周期分量对基波分量影响的快速算法,新算法的数据窗是半个周期的采样值加两个采样点,而其滤波效果远远优于半波傅氏算法。
该算法理论上可以完全消除任意衰减时间常数τ的非周期分量对基波分量的影响。
通过大量的仿真试验表明,新算法滤除衰减非周期分量能力强,计算简单,速度快,具有实际应用价值。
大多数微机保护算法的计算可视为对交流信号中参数的估算过程,对算法性能的评价也取决于其是否能在较短数据窗中,从信号的若干采样值中获得基波分量或某次谐波分量的精确估计值。
目前广泛采用全波傅氏算法和最小二乘算法作为电力系统微机保护提取基波分量的算法。
但由于半波傅氏算法只用半个周期的采样数据,响应快,但滤波能力相对较弱,故只能用于保护切除出口或近处故障。
为使保护快速动作,选择数据窗较短的快速算法就成为关键。
从衰减非周期分量对半波傅氏算法的影响分析入手,提出新的计算方法,可完全滤除衰减非周期分量及奇次谐波分量,以提高其滤波能力。
关键词:微机保护衰减非周期分量半波傅氏算法快速算法
第一章 半波傅氏算法
为了分析衰减非周期分量对半波傅氏算法的影响,设电力系统故障电流有如下形式:
(1-1)
式中 I m (n),φn 分别为n 次谐波的幅值和初相角。
因半波傅氏算法不能滤除偶次谐波,所以设式(1)中n 为奇数,则所得的n 次谐波分量的实部模值an 和虚部模值bn 的时域表达式分别为:
(1-2)
(1-3)
式中 T 为基波分量的周期;ω为基波分量的角频率,ω=2π/T 。
在计算机上实现时,是对离散的采样值进行计算。
用离散采样值表示的半波傅氏算法为:
(1-4)
(1-5)
式中 k 表示从故障开始时的采样点序号;N 为每个周期的采样点数。
n 次谐波的幅值I m (n)和初相角φn 为:
(1-6)
(1-7) 假设暂不考虑输入信号(如式(1-1)的形式)中的衰减非周期分量,根据式(1-4)、式(1-5)利用半波傅氏算法得到的理论值为:
(1-8)
(1-9)
第二章半波傅氏算法的误差分析
如果输入信号中包含衰减非周期分量,将使半波傅氏算法的计算结果产生误差,具体分析如下:
(2-1)
(2-2)
令
(2-3)
(2-4)
由式(2-1)、式(2-2)可知,当输入信号中包含有衰减非周期分量时,I0≠0,α≠0,则w a≠0,w b≠0。
从而看出,n次谐波的实部和虚部与理论值相比,存在误差w a 和w b。
因此,消除w a和w b是将半波傅氏算法应用于快速保护的关键之一。
第三章滤除衰减非周期分量的新算法
为了全部使用故障后的采样值,取k≥N/2,同时,为了使新算法的推导更趋于精确,下面以时域形式介绍新算法的推导过程。
a.取第一个数据窗,使t∈[0,T/2],利用半波傅氏算法有:
(3-1) 令
(3-2) 则式(3-1)可以简化为:
(3-3)
,取第2个数据窗,使t∈
b.取延时ΔT为一个采样周期时间T
s
[ΔT,(T/2)+ΔT],有:
(3-4) 令
(3-5) 在理论上,移动的数据窗大小(即ΔT)可任意确定,但为了提高算法的计算
较合适。
一旦确定了每个周期的采样速度以达到快速计算的目的,ΔT选取为T
s
点数N,ΔT也就随之确定。
同时,若谐波次数n和延时ΔT确定,k
a ,k
b
就成为
两个常数。
则式(3-4)可化简为:
(3-6)
c.延时2ΔT,取第3个数据窗,使t∈[2ΔT,(T/2)+2ΔT],有:
(3-7) 由式(3-3)、式(3-6)、式(3-7)可以看出,3个方程组中只有5个未知数,
而为了校正衰减非周期分量对半波傅氏算法的影响,只要计算出w
a 和w
b
的值,
即可对半波傅氏算法由于衰减非周期分量引起的误差进行校正,式中的未知数A,B和e-αΔT只需作为中间变量,没有必要求出。
其计算过程如下:利用式(3-3)、式(3-6)、式(3-7),先消除A,B两个中间变量。
令:
Q=a
n ′-k
a
a
n
+k
b
b
n
(3-8)
R=b
n ′-k
a
b
n
-k
b
a
n
(3-9)
X=a
n ″-2k
a
a
n
′+a
n
(3-10)
Y=b
n ″-2k
a
b
n
′+b
n
(3-11)
这里的Q,R,X,Y值可根据采样值实时计算出。
所以由式(3-8)~式(3-11)得:
w a /w
b
=X/Y (3-12)
w b Q-w
a
R=k
b
(w2a+w2b) (3-13)
由式(3-12)和式(3-13)得:
(3-14)
式(3-14)是由于衰减非周期分量对半波傅氏算法产生的影响数据。
则由式(2-1)和式(2-2)可得,消除衰减非周期分量对半波傅氏算法影响的校正量a
c和
n
c应为:
b
n
分析新算法的整个计算过程可知,半个周期后第3个采样间隔的计算量较大,但其计算时间仅约80μs,完全能够满足实时控制的要求。
第四章 仿真计算
通过设置下列输入信号:
i(t)=50e -t/τ+50sin(ω1t+φ1)+ 15sin(3ω1t)+10sin(5ω1t)
对新算法进行仿真计算,并与半波傅氏算法和全波傅氏算法进行了比较,其结果见表1。
这里取τ=30ms,ω1=100π,φ1=30°,其对n 次谐波分量的计算程序流程图如图1。
图4-1 程序流程图
开始 输入信号数据
去第1数据窗,利用半波傅氏公式计算n a 和n b 延时S T ,去第2数据窗,再计算'n a 和'n b 延时2S T ,去第3数据窗,再计算"n a 和"n b 计算中间变量Q 、R 、X 、Y 数值 计算a w 和b w
输出计算结果 n n nc w a a -= wb b b n nc -=
开始
表4-1 仿真计算结果
从仿真计算的输入信号可以看出,本算例输入信号中含有衰减非周期分量的初值为100%基波幅值,之所以设置这样大的衰减非周期分量初值(在实际中属于比较严重情况),就是为了人为增大衰减非周期分量对滤波算法的影响,来检验新算法的有效性。
从表1可见,通过与全波傅氏算法和半波傅氏算法的比较,本文提出的新算法具有很高的计算精度。
算法
幅值
相角 计算值
误差值 /(%)
计算值
误差值 /(%)
全波傅氏算法 57.41243 14.82486 28.96597 -3.44676 半波傅氏算法 99.43623 98.87245 27.50386 -8.32044 新算法
49.99940
0.00000
29.99998 0.00004
第五章结论
本文在分析衰减非周期分量对半波傅氏算法产生的影响的基础上,介绍了一种新算法,不仅保留了原来半波傅氏算法的功能,又增添了对衰减非周期分量的过滤作用。
新算法所采用的数据窗仅为半个周期的采样值加两个采样点,计算简单,速度快,精度高;同时其滤除衰减非周期分量的能力又不受衰减非周期分量时间常数大小的限制。
特别适合于需要快速动作的继电保护
参考文献
[1].杨奇逊,黄少锋.微型机继电保护基础(第3版).北京:中国电力出版社,2007.
[2].许正亚.变压器及中低压网络数字式保护.北京:中国水利水电出版社,2004.
[3].陈皓.微机保护原理及算法仿真.北京:中国电力出版社,2007.
[4].杨新民,杨隽琳.电力系统微机保护培训教材(第2版).北京:中国电力出版社,2008.
[5].罗士萍.微机保护实现原理及装置.北京:中国电力出版社,2001
[6].丁书文,张承学,龚庆武,等.半波傅氏算法的改进——一种新的微机保护交流采样快速算法.电力系统自动化,1999,23(5):18-20.。